
基于改进Hough变换的输电线路带电作业机器人检测方法
2022-06-28 17:47姜文东方玉群秦威南傅卓君
制造业自动化 2022年6期
朱 凯,姜文东,方玉群,秦威南,傅卓君
(1.国网浙江省电力有限公司金华供电公司,金华 321000;2.国网浙江省电力有限公司,杭州 310000)
0 引言
输电线路经过变压器、断路器等设备,将电能传输给用电设备的线路。输电线路安装在室外环境中,由于鸟类碰撞、天气变化、自然灾害以及外力破坏等原因,输电线路及其相关设备可能会出现运行故障,不仅降低输电线路的工作效率,同时还会影响用户端的正常用电,甚至还可能引发一系列过电事故[1]。因此需要定期检测输电线路,及时发现线路安全隐患,并采取相应的维修措施。
为了降低线路检测工作对线路输电工作的影响,一般不会采取停电检测方式,即检测工作在输电线路带电状态下进行,这为检测工作带来一定的难度和危险性,为此研发了带电作业机器人。在考虑带电作业安全性的前提下,利用机器人设备完成输电线路的检测工作,最大程度保证检测工作的安全性,并将事故危害降至最低。
目前输电线路带电作业机器人检测方法的研究成果较少,发展较为成熟的检测方法大多应用了深度学习算法、支持向量机等技术,然而在实际的应用过程中存在明显的检测时延长、检测精度和安全性低的问题,为此引入Hough变换技术。
Hough变换技术是一种基于图像空间的曲线转换方法,在参数空间内检测出最优点,并确定其特征参数,并在此基础上提取图像中的规则曲线。而改进Hough变换技术Hough变换技术降低变化的计算量以及占用空间,通过改进Hough变换技术的应用,以期能够提高输电线路带电作业机器人检测方法的检测性能与安全性能。
1 输电线路带电作业机器人检测方法设计
1.1 构建输电线路带电作业机器人结构模型
输电线路带电作业机器人主要由移动滚轮、支撑臂、控制箱、机械臂、摄像机等设备构成,每个机械臂具有多个自由度,能自由伸缩、旋转,并能调节臂间的距离和位置。在机械臂上装有手爪等零件,手爪可以夹持物品,为机械手完成工作提供所需的辅助,并且可以利用腕部的手腕来调节机械臂的位置和角度。在此基础上,安装摄像机,并将其与传动、控制装置连接,利用机械手调整控制器在机身上的位置,并实现对摄像角度、高度的控制与调整。由于机器人在输电线路带电状态下完成检测作业,因此需要执行抓取动作,只需实现输电线路实时图像的采集工作即可[2]。在带电作业机器人工作状态下,第i个连杆坐标系与第j个连杆坐标系的关系可以表示如式(1)所示。

式(1)中,iRj和ipj分别表示的是第j与第i个连杆坐标系的旋转和平移变换矩阵。由此可以得出机器人设备上任意两个连杆之间的位置关系,从而判定当前机器人所处位姿,同理可根据机器人待执行的输电线路检测任务,确定各个连杆的位置信息,在控制器的驱动控制下,实现机器人实时位姿的调整。
1.2 计算机器人带电作业安全距离
在带电作业中,最大的风险就是空气被彻底击穿,使其绝缘特性变为导体,而夹紧式机械手与导线之间会产生击穿放电现象。因此在机器人带电作业安全距离的计算过程中,需保证机器人作业位置的电场强度低于机器人所能承受的电场最大强度。输电线路的击穿从电晕开始的,而电晕则是多条发源于同一源头的流注所构成。聚集在电晕中的电流会产生热量,引起大气的热电离化,从而形成一个引导通道。在先导通路的最前端为先导电晕区,而先导电晕区则为先导继续进行扩散提供必需的自由电子。此外,导体管的导电性增大,使导体管头部的电场增大,使导体管头部产生足够的电场,以诱导空气电离,保持导体电晕。在导电晕和导流通道的相互作用下,导电晕一直持续延伸,直至贯穿整个气隙。当导流通过气隙时,在头部的小缝隙内,高场强会引起电离,从而导致电离和热电离现象。主要电离区沿着导流通道快速扩散,这是主要放电过程,主要是因为导流通道中有大量的游离带电颗粒,使主放电发展很快,当主要放电通过气隙时,会产生强烈的电弧放电。任意时刻输电线路起晕电场的计算公式如式(2)所示:

式(2)中参数μ和ρair分别表示输电线路表面的粗糙度和相对空气密度,变量rc为输电线半径。得出机器人带电作业安全距离的计算结果如式(3)所示:

其中Emax表示带电作业机器人能够承受的最大电场强度,vc为放电粒子在空气中的移动速度。除此之外,在机器人设备上安装绝缘封层,提高机器人带电作业的安全性。
1.3 规划带电作业机器人检测路径
在带电作业机器人内部安装传感器设备,该传感器能够发现前方180°以内的障碍物,机器人对周围环境的实时检测结果如式(4)所示:

其中θ1为当前机器人的方向角,L为传感器的探测长度。结合安全距离和环境传感反馈结果,经过自由空间求解、确定测点位置以及检测轨迹生成三个步骤,得出检测路径的规划结果。自由空间的求解是路径规划的核心问题之一,自由空间的形状和维度直接关系到路径的规划效果和效率。将带电作业机器人机械臂自由空间的求解结果如式(5)所示:

式(5)中,Cdep和Cin分别为相关构型空间和无关构型空间。在输电线路上设置测点,以输电线路与发电设备的连接点为起始位置,每隔5m设置一个测点,若输电线路中存在变压器、断路器、绝缘子等设备,则将设备的安装位置作为新增测点,记录设置测点的位置,并以输电线路与用电设备的连接点作为检测终点[3]。在此基础上按照图1表示流程,生成带电作业机器人的检测路径。

图1 带电作业机器人检测路径规划流程图
为了减少带线作业机器人检测时延,在保证机器人能够检测到所有测点的前提下,对初始生成的检测路径进行平滑处理。
1.4 输电线路检测图像采集与预处理
将带电作业机器人放置在输电线路初始位置,根据机器人的路径规划结果,同时启动机器人运动和控制程序,将机器人上的摄像机调整至开启状态,随机器人的运动获取输电线路各个位置的检测图像。由于摄像机获取的输电线路检测图像含有复杂的自然背景,在光照、噪声等因素的干扰下,无法保证传输信号的清晰度和高品质[4]。因此,需要对初始图像进行预处理,简化图像的复杂性。原始图像为彩色图像,含有大量的信息,但改进Hough变换技术无法对彩色图像中的输电线路进行直接处理,需要执行灰度处理操作。图像灰度化处理结果如式(6)所示:

其中,(i,j)表示初始图像中的像素点位置,R(i,j)、G(i,j)和B(i,j)表示(i,j)像素点的红、绿、蓝颜色分量,最终将像素点的分量全部转换为灰度分量。采用中值滤波的方式去除图像中的噪声,处理结果如式(7)所示:

式(7),中f(i,j)和g(i,j)分别表示的是中值滤波处理前后的像素点灰度值,参数k和l分别为滤波滑动窗口的长度和宽度,med{}为中值处理函数。移动选用的窗口重复执行上述过程,直到窗口达到最后一个像素点为止。此外图像增强其处理过程如式(8)所示:

式(8)中,M、N、M′和N′分别为增强处理前后图像灰度最大值和最小值。将输电线路带电作业机器人获取的所有检测图像按照上述步骤进行处理,得出满足精度要求的图像处理结果。
1.5 利用改进Hough变换技术提取输电线路图像特征
图2所示的是改进Hough变换技术的变换原理。

图2 改进Hough变换原理图
在图像空间(x,y)中,点P1、P2与参数空间(k,b)中的直线L1和L2一一对应,而在图像空间(x,y)中的直线L0对应于参数空间(k,b)中的各点P0。利用观察参数空间(k,b)内点的重叠度可以判定共线状态[5]。然而,当图像空间中的直线为垂线时,则会导致k、b的无边界情况,所以,在实际的输电线路图像特征提取过程中用极坐标来替代直角坐标,此时输电线路检测图像中的任意一个直线图像均可描述如式(9)所示:

式(9)中,φ为直线法向量与水平方向轴的夹角,计算结果λ为图像坐标系中原点到直线的距离。由此可以得出输电线路检测图像任意纹理的方向特征提取结果如式(10)所示:

将式(9)的特征提取结果代入到式(10)中,便可得出图像中某一个纹理的方向特征。按照上述方式可以得出检测图像中所有纹理和轮廓特征的提取结果,通过特征融合得出综合特征提取结果。
1.6 实现输电线路带电作业机器人检测
输电线路带电作业机器人的检测内容可以分为三个部分,一部分是检测输电线路上元件设备的数量和位置,第二是检测当前输电线路是否存在故障,故障类型主要包括断路、线路裸露等,最后一部分是检测输电线路中是否存在异物,因此主要设置输电线路各个组成部件的轮廓标准特征数据以及正常工作状态下输电线路的特征标准数据,分别记为τelement和τnormal。那么输电线路的检测过程如式(11)所示:
式(11)中,τfuse为提取的检测图像融合特征,计算结果ϖelement和ϖline分别为元件特征与正常线路特征的匹配度。设置检测阈值为ϖ,若ϖelement的计算结果大于阈值,则表示当前带电作业机器人收集图像中存在设备元件,记录特征匹配数量即为图像中的元件数量,若小于,则说明图像中不存在输电线路元件。同理,ϖline高于阈值,则证明当前输电线路处于正常运行状态,否则说明输电线路存在故障点。确定输电线路元件和故障点的具体位置,最终得出可视化检测结果。
2 检测性能测试实验分析
为了验证基于改进Hough变换的输电线路带电作业机器人检测方法的检测性能,设计性能测试实验,通过与预期结果的对比。
2.1 布设输电线路实验对象
此次实验选择某市的主网输电线路作为研究对象,该输电线路长度为48.45km,共有基础、铁塔共计47基。输电线路采用双回路架设,使用的导线型号为LGJ-400/35,地线两侧均采用24芯OPGW。根据输电线路工程的建设方案,可以将线路分为8段,每段长度约为6km。在此基础上通过人为破坏的方式设置线路故障,综合每段线路中包含的电力设备作为实验的检测目标,具体的设置情况如表1所示。

表1 输电线路检测目标设置表
收集输电线路工程的施工数据,确定各个电力元件设备的安装位置,并记录故障点的设置位置,以此作为判定输电线路带电作业机器人检测精度的对比标准。
2.2 带电作业机器人的安装与调试
选择带电机器人作为输电线路的检测设备,将其安装在实验环境中,调整内置摄像机设备的拍摄角度,保证摄像机能够拍摄到输电线路检测目标的完整图像信息。
在机器人运行之前,首先采用软件程序对其工作程序进行检测,并将其输入到作业环境中的工作任务和环境数据。同时,作业人员在作业地点设置了导航板和人员隔离区。开机后,由操作员进行手动远程控制,按规定路径从仓库内到达所需工作地点的导航板。之后完成人工远程控制,进入自动驾驶阶段,由带电机械手沿着导引板运动至预定工作点,再将最后的定位误差反馈给系统。系统会自动检查偏差是否在容许的范围,如果有偏差,则进行自动调整。如果偏离满足要求,那么就将移动机架上的水平支架展开,并进行水平调整。提升台举升工作台至目视系统工作高度。然后,通过在固定端金属工具的固定面上使用粗定位Mark点来实现金属工具的位置。最后,通过对机器人的粗略定位,对上下滑台的位置进行相应的调整,以确保机器人的工作空间能够覆盖整个工作区域。将规划的检测路线数据导入到机器人控制器中,通过机器人实际移动数据的记录,判断机器人是否能够正常执行检测指令,若机器人反馈结果正常,则直接进入实验阶段,否则需要重新安装带电作业机器人,直到反馈结果显示正常为止。
2.3 设置检测性能量化测试指标
此次实验分别从输电线路的检测精度、检测时效性和安全性三个方面进行测试,设置错检率和误检率作为检测精度的量化测试指标,其数值结果如式(12)所示:

其中Numtarget表示待检测的目标数量,Numcorrect和Numout分别为检测正确的目标数量和机器人输出结果中的检测目标数量。检测时效性的测试指标为检测方法的响应时间,可以通过带电机器人的后台运行数据直接得出,而检测安全性指标设置为危险系数,其数值结果如式(13)所示:

式(13)中,dactual带电作业机器人与输电线路测点之间的实际距离,Umax为输电线路的最大电压。为保证检测方法的应用价值,要求该方法的错检率和误检率均不得高于3%,检测响应时间不得超过800ms,危险系数不得高于0.5。
2.4 实验过程与结果分析
启动带电作业机器人以及输电线路检测程序,得出可视化检测结果。图3所示的是L01输电线路故障和异物检测结果。

图3 输电线路带电作业机器人检测结果
统计所有线路区段的检测数据,得出改进Hough变换的输电线路带电作业机器人检测方法检测精度的测试结果,如表2所示。
将表2中的数据代入到式(12)中,得出输电线路带电作业机器人检测方法的平均错检率和漏检率分别为2.87%和1.78%,均低于预设值。另外通过式(13)和式(14)的计算,得出基于改进Hough变换的输电线路带电作业机器人检测方法检测时效性和安全性的测试结果,如图4所示。
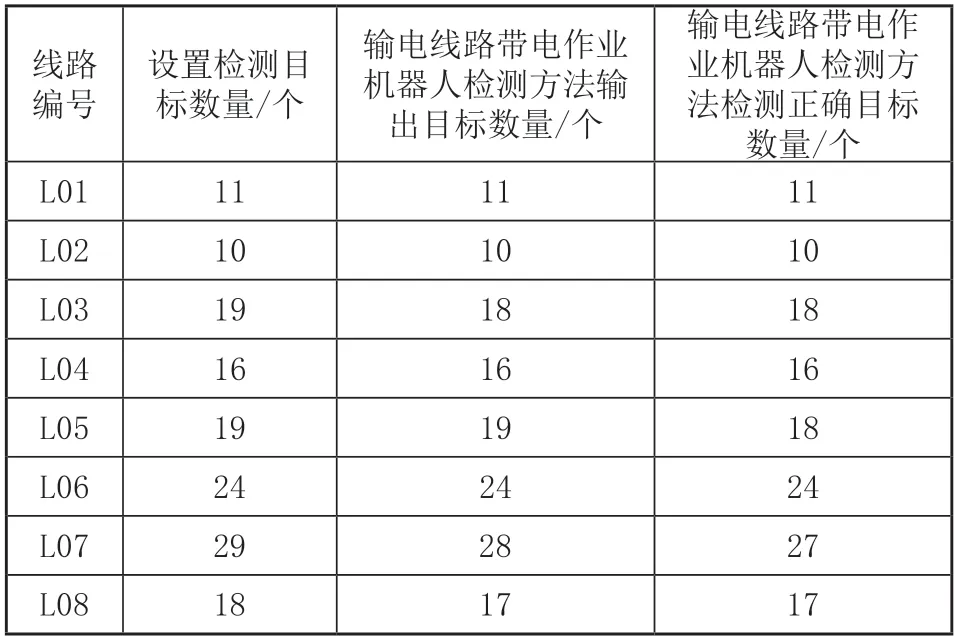
表2 输电线路带电作业机器人检测精度测试结果
从图4中可以直观的看出,优化设计检测方法的最大响应时间为620ms,危险系数的最大值为0.34,由此证明优化设计检测方法的时效性和安全性均满足应用要求。

图4 检测时延与安全性的测试结果
3 结语
通过机器人设备的设计与开发,降低了输电线路带电作业检测的危险性,对于输电线路的检测工作具有重要意义。从实验结果中可以看出,在保证机械臂系统有良好平稳的性能为前提下,通过改进Hough变换技术的应用,有效提高了检测方法的精度、时效性以及安全性,因此可以投入到实际检测工作中。
猜你喜欢
消费电子(2022年6期)2022-08-25
科技研究(2021年22期)2021-09-22
中国电气工程学报(2019年22期)2019-10-21
建材发展导向(2019年5期)2019-09-09
电子制作(2018年10期)2018-08-04
电子制作(2018年12期)2018-08-01
大陆桥视野(2016年22期)2016-12-28
山东工业技术(2016年15期)2016-12-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
