机载双基地极化敏感阵列多干扰抑制
2022-07-01 06:22夏德平孟祥东
雷达学报 2022年3期
夏德平 张 良 吴 涛 孟祥东
①(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
②(南京电子技术研究所 南京 210039)
1 引言
随着雷达极化理论研究不断深入以及新器件的高速发展,极化抗干扰技术[1,2]已进入工程应用,其本质是利用干扰与目标在极化域的差异,减弱或消除干扰对雷达检测性能的影响。针对主瓣干扰和欺骗性干扰,文献[3,4]提出了基于超复数的极化-空域级联滤波算法和空-时-极化联合滤波算法,用于机载雷达抑制干扰;文献[5]提出了一种基于重叠滑窗子阵合成的空-极化域联合自适应波束形成算法,用于机载雷达抑制欺骗式干扰;为了解决与目标同向的主瓣干扰抑制问题,文献[6,7]将极化信息引入独立成分分析(Independent Component Analysis,ICA),实现干扰抑制而不影响同向目标的检测。文献[8]提出空间极化域零解耦方法实现主副瓣多干扰抑制,但是该算法需要主波束范围内主瓣干扰与目标的极化特性不同,且主波束内只能有1个干扰,限制了该算法的应用。从上述文献来看,极化域增加了新的维度,有效提升抗主瓣干扰能力,但存在探测视角单一,所获目标信息有限等问题,制约了单基地极化敏感阵列抗干扰性能。
双/多基雷达系统主要利用空间分置的两部或多部雷达来实现,当干扰信号和目标信号同时进入雷达主瓣时,可利用干扰信号与目标信号在不同平台间的特征差异,有效抑制主瓣干扰[9–12]。文献[13–17]利用同一干扰信号在不同平台相关而目标非相关特性,通过平台间相消处理来实现主瓣干扰抑制;为了实现目标空间独立性条件,需要不同平台的基线长度满足一定要求[18],从而限制了算法应用场景。文献[19]利用一种基于极化滤波的多基雷达协同主瓣干扰抑制方法,可实现主瓣干扰对消,但该算法没有充分利用空域自由度,当存在强副瓣干扰,尤其是主瓣和副瓣干扰同时存在情况,该算法已无法有效应对。在现代复杂电子对抗场景下,机载雷达将面临多个主副瓣干扰压制,雷达探测能力大幅下降,这就需要综合空域、时域以及极化域等多维信息,来提升机载雷达对抗主副瓣干扰能力。本文基于这个考虑,综合双基地和极化抗干扰优势,构建了一种机载双基地雷达极化敏感阵列,利用双基地-极化来分级抑制主副瓣干扰,首先,对机载双基地主辅两个雷达分别处理,在遮蔽主瓣干扰的基础上利用自适应处理抑制副瓣干扰;然后,再利用双基地极化信息对主瓣干扰进行抑制,为了提升主瓣干扰抑制效果,在对消前优先修正干扰空域导向矢量,最后,通过构建干扰对抗场景来对该方法仿真验证。
2 信号模型
2.1 机载双基地极化敏感阵列
机载双基地极化敏感阵列是在机载双基地雷达基础上通过增加能够敏感极化信息的正交偶极子对来实现的,如图1所示。该雷达包括主雷达和辅雷达两部分,每部分都由一部极化敏感阵列组成,每个阵列包括 1×M个正交偶极子对,沿飞机正侧面布置。假设以主雷达地面投影点O为中心建立空间直角坐标系O-XY Z,假定平台的基线长度为L且到Y轴投影为D,主辅雷达的高度分别为Hp和Ha,速度分别为Vp和Va,主辅雷达平台与基线的夹角分别为βp和βa,为便于描述,假定主辅雷达平台均沿Y轴飞行,夹角为零。极化敏感阵列M个阵元沿Y轴,按照半波长均匀排列,每个偶极子对由两个相互正交的水平极化通道 H (沿X轴方向)和垂直极化通道 V (沿Z轴方向)组成,极化间隔离度相对较高,忽略互耦问题。该雷达系统采用单发双收模式,主雷达正交极化通道采用正交波形同时发射,主辅雷达正交极化通道同时接收工作。
假设1个目标和n个干扰信号从远场入射分别进入主辅雷达,如图1所示,其中,标志T代表目标,标志I代表干扰,目标回波信号和干扰信号的空间到达角为 (θ,φ),θ,φ分别为方位角和俯仰角;目标回波信号和干扰信号的极化域参数为 (γ,η),γ,η为完全极化波相位描述子,γ为极化辅角,η为极化相位角,其极化矢量可表示为
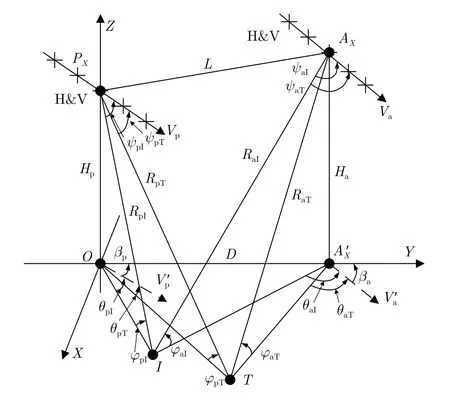
图1 机载双基地极化敏感阵列信号模型Fig.1 Signal model of airborne bistatic polarization-sensitive array

目标回波信号或干扰信号到达第m个阵元的相位延迟为

其中,λ为载频信号波长。线阵的空域导向矢量可表示为

式(1)—式(3)适用于主辅雷达,没有利用下标来区分。
在目标和干扰信号同时存在的情况下,主雷达在t时刻的接收信号由目标回波信号Xt(t)、干扰信号Xj(t)以 及噪声信号Np(t)组成,可表示为

其中,目标回波信号Xt(t)为

式(5)中,Gp为目标回波幅度,并假定水平和垂直极化通道一致为M个通道接收矩阵为水平和垂直两个极化通道接收矢量,⊙表示Hadamard积,Ap=[ap(θ,φ),ap(θ,φ)],Ap为两个极化通道空域导向矩阵,S为目标极化散射矩阵(PolarizationScatteringMatrix,PSM)ept为发射极化矢量,r(t-τp)为 信号复包络,τp为目标回波时延,Np(t)为零均值方差的高斯白噪声。
干扰信号Xj(t)表示为

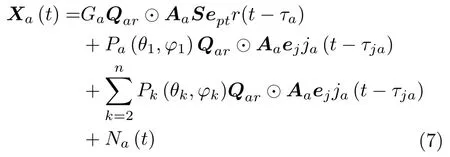
式(7)中定义同式(5)和式(6),只需把下标由p更换为a。
2.2 目标与干扰极化特性分析
在窄带工作条件下,远场目标可视为点目标,距离主雷达Rp处的雷达目标散射回波分别被 H极化通道和 V极化通道所接收,则输出信号可以表示为

在忽略接收机噪声等影响情况下,输出信号可近似表示为
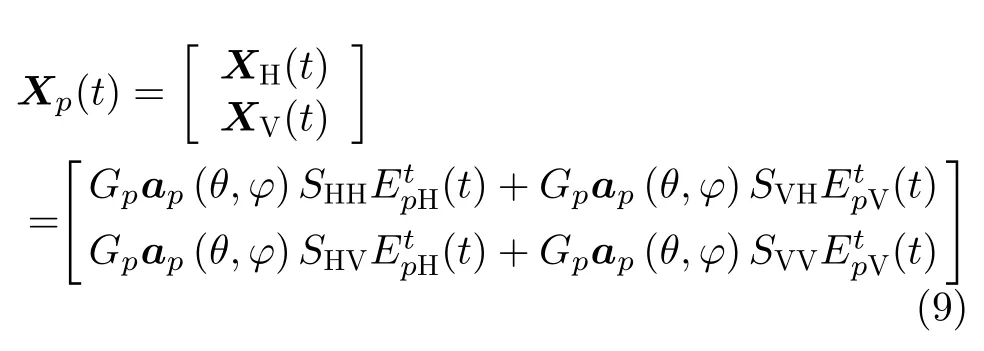
其中,SHH,SHV,SVH和SVV为目标PSM的元素,具体定义为

类似地,辅雷达接收目标回波信号可近似表示为
有源噪声干扰条件下,主雷达接收的噪声干扰信号近似表示为

同样,辅雷达接收的噪声干扰信号近似为

从上述分析来看,由于雷达系统采用单发双收模式,主雷达发射,主辅雷达分别接收,目标回波信号在主辅雷达间存在差异,而有源干扰信号在主辅雷达间近似相同,因此,可通过双基地协同对消有源干扰信号而基本不影响目标信号。
3 主副瓣干扰对消算法
机载双基地极化敏感阵列同时对抗主、副瓣干扰方法的流程如图2所示,从图中可看出,该方法首先通过对主辅雷达的两个极化通道的协方差矩阵进行重构来遮蔽主瓣干扰,降低自适应处理对主波束的影响,然后对主辅雷达两个极化通道各自进行副瓣干扰抑制,最后再利用双基地极化通道对主瓣干扰进行对消,从而达到同时有效抑制主副瓣干扰的目的,在极化对消主瓣干扰之前,优先对主辅雷达的主瓣干扰空间导向矢量进行了修正,用来提升主瓣干扰抑制效果。

图2 主副瓣干扰同时抑制流程Fig.2 The main-lobe and side-lobe interference suppressed simultaneously
3.1 重构协方差矩阵抑制副瓣干扰
对主辅雷达 H 极化和 V极化通道内副瓣干扰进行自适应抑制,不失一般性,以主雷达的H极化通道为例进行相应算法介绍。主雷达H极化通道信号加权求和为

其中,W为波束形成权矢量,(·)H为共轭转置。在信号回波无失真同时最小化输出通道条件下求取最优矢量

根据拉格朗日乘子法求取最优权


其中,E{·}为 数学期望,Rs为 信号协方差矩阵,R1为主瓣干扰协方差矩阵,Rj为副瓣干扰协方差矩阵,Rn为噪声协方差矩阵分别代表信号功率、主瓣干扰功率、副瓣干扰功率和噪声功率,a0,a1,ak分别为信号、主瓣干扰和第k个干扰的空域导向矢量,I代表单位矩阵。实际中,常利用样本协方差矩阵来代替R

其中,L为样本数。在主副瓣干扰同时存在情况下,直接对干扰进行抑制会导致主波束畸变[15]。为了在主波束保形条件下实现副瓣干扰抑制,需对接收协方差矩阵进行重构。本文通过构建特征投影矩阵来遮蔽主瓣干扰和目标回波,假设Θ为3 dB主瓣宽度对应的角度区域,主瓣干扰和目标回波均落在该角度区域内,通过构建一个特征投影矩阵B来消除主瓣干扰和目标回波[20],B可以表示为

其中,U=[a(θ0-κδ),a(θ0-(κ-1)δ),...,a(θ0+κδ)],U为导向矢量矩阵,由2κ+1个导向矢量构成,δ和κ分别为角度展宽间隔和角度展宽个数,预设的δ和κ应确保[a(θ0-κδ),a(θ0+κδ)] 覆盖Θ,Δ为加载量。对接收到的数据用投影矩阵B来消除主瓣干扰和目标回波信号成分

将投影后的数据代入式(18),其协方差矩阵表示为

修正后的最优权矢量应为

采用式(22)权矢量可实现主辅雷达两个极化通道副瓣干扰抑制;然后将辅雷达两个极化通道数据送主雷达,形成了主辅雷达两个极化4通道数据,本文假设通道间数据在时域上已对齐,输出的主辅雷达4通道数据可表示为

3.2 基于导向矢量修正的主瓣干扰对消
考虑干扰信号的入射角度与主辅雷达的波束指向存在角度偏差且存在方向误差,导致主辅雷达的干扰信号极化导向矢量与理想导向矢量存在误差,从而在一定程度上影响干扰对消结果;为了消除该影响,拟通过约束条件对估计的干扰信号极化导向矢量sp进行优化[21],约束条件如下:

其中,δ为常数,用来代表极化导向矢量偏差大小,=[spH,spV,saH,saV]为 理想极化导向矢量,Ry为无源侦收条件下双基地极化通道协方差矩阵。

通过拉格朗日乘子法求解式(24),求解式为

其中,ζ为拉格朗日乘数,通过对sp求梯度运算,并令其为零,最终可以解得

从而求得最优加权矢量Wpa为

从而获得的主瓣干扰对消后输出为

4 仿真分析
通过构建干扰对抗场景对本文算法的有效性进行计算仿真。主要参数如下:双基地雷达平台飞行高度为8000 m,飞行速度150 m/s,同向飞行,天线阵面构型为 1×48,载频1250 MHz,重复频率8000 Hz,采样带宽5 MHz。假设主辅雷达两个平台距离相隔50 km,干扰1 极化参数(γ,η)=(30°,60°),干扰2极化参数(γ,η)=(20°,50°),干扰3极化参数(γ,η)=(45°,45°),目标极化参数(γ,η)=(10°,70°),δ为0.2°,Δ为1e-4,干扰和目标的相对主辅雷达的距离和入射角度等其他参数如表1所示。文中为简化说明,假设将辅雷达的干扰数据传输到主雷达来对消,仅考虑主雷达的目标检测,辅雷达的目标暂不考虑,其与主雷达的目标融合算法另文论述。

表1 干扰与目标参数Tab.1 Interference and target parameters
4.1 主瓣区域凹口构建
在天线坐标系下进行主辅雷达主瓣区域构建凹口遮蔽主瓣干扰和目标回波仿真。假定波束指向角(90.0°,0°)为阵面法向,根据主雷达波束排布,当(80.0°,0°)为波束指向时,转换为天线坐标系下为(–10.0°,0°)。在此波束指向下,分别构建波束指向角、3 dB波束宽度以及主波束宽度3种情况凹口。其中,波束指向角对应δ=0,κ=1,3 dB波束宽度对应δ=0.05,κ=80,主波束宽度对应δ=0.05,κ=120;从图3(a)可看出,在此3种情况下均能有效形成凹口;同样,在辅助雷达波束指向(10°,0°)时,此3种情况均能形成有效凹口,如图3(b)所示。

图3 主辅雷达凹口构建仿真Fig.3 Simulation of the primary and auxiliary radar notch construction
4.2 副瓣干扰抑制能力分析
在天线坐标系下进行干扰抑制响应分析,3个干扰在天线坐标系下对应角度分别为干扰1(–4.1°,–1°)、干扰2 (–40°,–1°)、干扰3 (–9.6°,–2°),目标为(–9.7°,–2°),其中,干扰1、干扰2为副瓣干扰,干扰3为主瓣干扰。图4(a)给出了协方差矩阵未重构情况下的空间自适应响应图,从图中可看出,因同时存在主副瓣干扰,主波束出现畸变,影响目标检测。图4(b)为主波束遮蔽后空间自适应响应图,从图中可看出,主波束内干扰方向没有形成零点,主波束没有畸变,而副瓣干扰方向形成凹口,副瓣干扰得到抑制而目标检测基本不受影响。
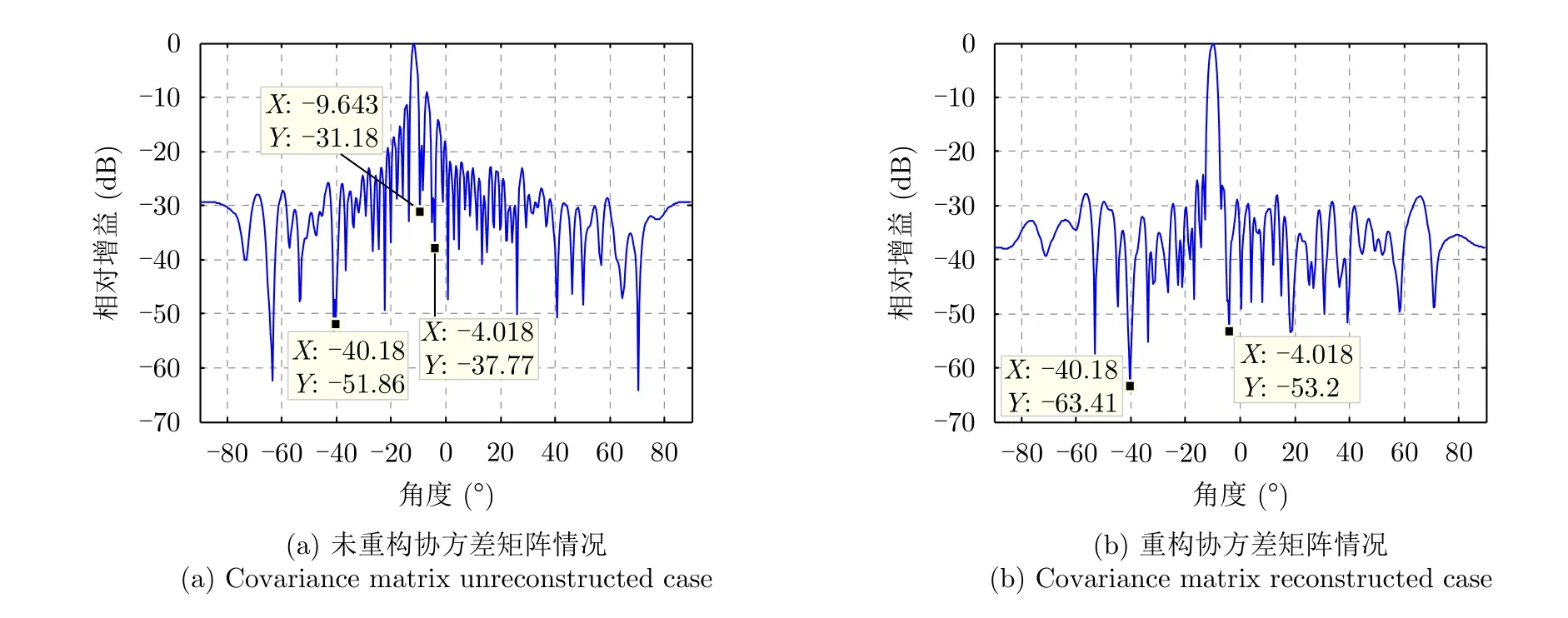
图4 主雷达自适应响应方向图Fig.4 Adaptive response pattern of the primary radar
同样对辅雷达进行分析,根据辅雷达波束排布,当(100.0°,0°)为波束指向时,转换为天线坐标系下为(10.0°,0°),干扰在天线坐标系下分别为干扰1(4.1°,–1°),干扰2(–31.8°,–1°),干扰3(9.6°,–2°),以及目标(9.7°,–2°)。其中,干扰1、干扰2为副瓣干扰,干扰3为主瓣干扰,其空间自适应响应图在有、没有遮蔽条件下的结果分别为图5(a)、图5(b)所示。从图中可看出,通过重构协方差矩阵可对主波束进行遮蔽,在抑制干扰时,主波束没有畸变,而在副瓣干扰方向形成凹口,能形成对副瓣干扰有效抑制,而未重构协方差矩阵则对目标检测存在影响。

图5 辅雷达自适应响应方向图Fig.5 Adaptive response pattern of the auxiliary radar
4.3 主瓣干扰抑制能力分析
双基地极化敏感阵列采用单发双收模式,主雷达发射,主辅雷达分别接收,对接收的目标空间-极化参数 (θ,φ,γ,η)进行仿真,仿真结果如图6所示(考虑俯仰角φ相同,不单独给出),从图中可看出,目标极化参数(10°,70°)相同,但由于目标进入主辅雷达的空间角度不同,主雷达为8 0.3°,辅雷达为 99.7°,主辅雷达接收的目标回波信号也就不同;而对于干扰信号来说,极化参数和空间角度基本相同,因此利用主辅雷达进行主瓣干扰对消而对目标基本不产生影响。

图6 主辅雷达的目标空间-极化分布Fig.6 The space-polarization of targets of the primary and auxiliary radar
在主副瓣干扰同时存在条件下,文献[19]算法的干扰抑制能力大幅下降,而采用本文方法则可有效抑制。图7给出主瓣干扰对消仿真结果,通过500次蒙特卡罗实验验证。从仿真结果来看,导向矢量未修正时主瓣干扰能被有效抑制,干扰抑制后的目标信干噪比为21.53 dB,损失了约3.5 dB;通过导向矢量修正后,干扰抑制能力进一步改善,干扰抑制后的目标信干噪比为22.8 dB,损失了约2.2 dB。

图7 主瓣干扰对消后目标仿真Fig.7 Simulation of target under the main-lobe interference suppressed
5 结论
本文针对主副瓣干扰难以同时抑制,而双基地雷达对基线长度又有限定问题,提出了一种基于机载双基地-极化分级同时对抗主副瓣干扰的方法。该方法充分利用目标在主辅雷达的极化特性存在差异,而干扰基本相同的特点,推导了机载双基地雷达分级对消处理算法,并对算法进行理论分析与仿真验证。仿真表明,该方法在对主副瓣干扰抑制的同时实现了目标的有效检测,所提算法有效提升了机载雷达对抗复杂电磁环境能力,为后续开展分布式协同探测研究打下基础。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
舰船科学技术(2022年11期)2022-07-15
计算技术与自动化(2022年2期)2022-07-04
海军航空大学学报(2021年1期)2021-09-01
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
数学学习与研究(2018年3期)2018-03-14
考试周刊(2016年54期)2016-07-18
现代电子技术(2015年10期)2015-05-29
现代电子技术(2009年8期)2009-06-25