舰载机全自动着舰系统顶层架构研究
2022-07-03 02:09耿延升罗来彬刘希美王伟
航空科学技术 2022年5期
耿延升 罗来彬 刘希美 王伟
摘要:以全自动着舰技术为研究对象,本文分析了着舰引导技术原理以及实现雷达引导自动着舰系统和差分卫星定位引导自动着舰系统架构的主要功能单元和要素,并基于差分卫星定位引导技术,发展出两种多模式引导自动着舰系统架构,以弥补差分卫星定位引导自动着舰系统抗干扰能力弱、且高度对抗战场环境下可能丧失关键功能的缺点。对所发展出的基于差分卫星定位引导技术的两种架构进行了比较,结果表明,多模式引导架构1具有系统简单、兼容性好的特点。研究工作对舰载机的全自动着舰系统顶层架构设计以及实现舰载机在航母上安全、有序、高效着舰具有一定的工程指导价值。
关键词:舰载机;全自动着舰;顶层架构;多模式引导;差分卫星定位
中图分类号:V271.492文献标识码:ADOI:10.19452/j.issn1007-5453.2022.05.001
舰载机是航母成为海军重要作战力量所依赖的主要装备。然而完成舰载机在航母上的起降任务却非常困难,而且极具风险。据统计,舰载机起飞、着舰阶段是事故率最高的阶段,起飞、进近、着舰阶段时间仅占舰载机执行任务周期时间的4%,而发生的事故却占整体事故数量的60%以上[1]。因此,实现舰载机和航母的匹配以及舰载机安全着舰一直是设计师们正在解决的问题。其中,全自动着舰技术最具代表性,并取得了一系列研究成果[2-12]。
全自动着舰技术是机载系统根据航迹偏差生成飞行控制指令,和飞机上的自动飞行控制系统以及油门机构联合工作,在无须人工操纵的情况下,实现舰载机安全、有序、高效地着舰[13-14]。学者们针对全自动着舰技术现状[6-11]、光电引导自动着舰[15]、返航着舰[16]、着舰纵向控制[17]、着舰系统建模与仿真[18]和着舰系统设计准则[19]等进行了研究,对全自动着舰技术系统架构的研究相对较少。
1着舰引导技术原理
着舰引导技术从基本原理上可以分为以下4类。
(1)由航空母舰上的设备发射生成可被感知的基准下滑道,如舰基微波着陆系统(MLS)、光学助降系统,原理上类似于陆基的仪表着陆系统(ILS)。飞机配备相应的设备,测量相对该“基准下滑道”的上下、左右偏差,实现最终进近的精确引导。
(2)航空母舰采用某种探测技术“观测”舰载机,如着舰引导雷达、摄像/光电探测、激光探测等,原理上与陆基精密进近雷达类似。飞机上需安装与探测器相协同的信标,由舰载探测设备对飞机(信标)进行相对位置探测,然后计算(包括坐标变换)求得飞机(拦阻钩)相对于基准下滑道的偏差,实现着舰引导。此类着舰引导技术精度高于第一类,基本满足最终进近全段精确引导的需要。当飞机距离甲板的高度低于探测器(如着舰雷达等)距离甲板的高度时,飞机上信标的高度低于探测器,导致探测器无法精确探测到飞机上信标的信号,不能对飞机实现准确定位。
(3)舰载机“观测”航空母舰。飞机上配备探测器,进近时探测航母并识别着舰点、下滑道,求取纵向、横向偏差。该技术已应用于无人机自动着陆。但是因航母是运动平台,该技术无法从探测结果中剔除航母纵摇、横摇造成的下滑道不稳定,故不能应用于引导舰载机着舰。
(4)航空母舰、舰载机在同一广域坐标系下各自完成定位,再通过求矢量差得到二者的精确相对位置。在不局限于特定区域的茫茫大海上,该方法可用的广域坐标系只能是大地坐标系,可用的定位方法只有卫星定位。为了引导飞机精密进近着舰,需要采用动态载波相位跟踪技术的差分卫星定位技术。另外,为了满足数据更新率要求,必须与惯导技术综合应用。在求得精确相对位置的基础上,计算得到飞机(拦阻钩)相对于理想下滑道的偏差。
2全自动着舰引导技术
参考国内外研究、应用情况,达到基本成熟或初步验证可行的全自动着舰引导技术包括:属于第二类着舰引导技术的着舰雷达引导技术、综合光电引导技术,以及属于第四类着舰引导技术的动态载波相位跟踪差分卫星定位技术。
从功能和能力方面分析,着舰雷达引导技术和综合光电引导技术的系统架构、工作模式、功能和能力相当。二者的差异主要来自所采用的主传感器:综合光电引导使用的传感器隐蔽性优于着舰雷达引导,但由于光学传感器更易受环境影响和被污染,从而降低其有效作用距离,其环境适应性低于着舰雷达。此外,着舰雷达采用二次雷达体制,其辐射的电磁波信号能量不大、作用范围很小(有效作用距离约18km),隐蔽性并不构成问题。而且,在成熟并装备应用的着舰雷达系统的基础上,新增综合光电引导并不会带来显著的收益。因此,本文在第二类着舰引导技术中只讨论着舰雷达引导技术。
(1)着舰雷达引导技术
着舰雷达引导技术属于第二类着舰引导技术。它是使用着舰雷达测定飞机与航母的相对位置。为了精确定位飞机拦阻钩相对理想下滑道的位置,采用雷达信标实现二次雷达技术以使着舰雷达锁定飞机上的一个确定点。在原始雷达数据基础上,进行数据稳定处理、航母坐标变换、飞机坐标变换,求解飞机(拦阻钩)相对于理想下滑道的偏差,进行甲板运动补償,生成引导数据传送至轨迹引导律,生成引导操纵指令传送至着舰飞行控制律,控制飞机作动装置/舵面的运动,实现全自动着舰闭环控制。
(2)差分卫星定位技术
差分卫星定位技术属于第四类着舰引导技术。基于卫星导航系统,使用“动态载波相位跟踪”差分卫星定位技术。系统工作时,航母、飞机两个动平台分别进行卫星定位,并获得来自多个卫星的伪距、载波相位数据,以及各自的惯导数据,然后将二者的数据相结合,进行“动态载波相位跟踪”差分卫星定位,得到航母(卫星天线)、飞机(卫星天线)的原始相对定位数据,定位精度可以达到厘米级。
在原始相对定位数据基础上,与采用着舰雷达引导技术相似,进行航母坐标变换、飞机坐标变换,然后求解飞机(拦阻钩)相对于理想下滑道的偏差,进行甲板运动补偿,生成引导数据传送至轨迹引导律,生成引导操纵指令传送至着舰飞行控制律,控制飞机作动装置/舵面的运动,实现全自动着舰闭环控制。F28D078E-4D12-408B-BC04-00A5C1D35B94
2.1雷达引导自动着舰系统架构
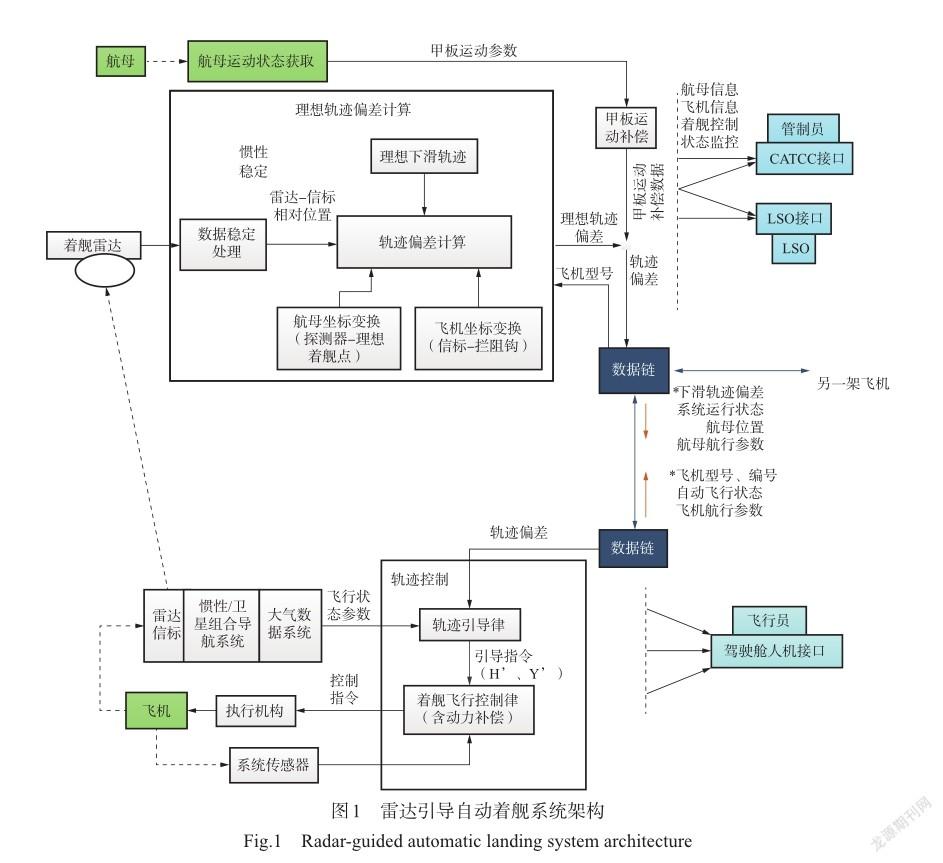
雷达引导自动着舰系统的总体架构如图1所示。图1中的主要功能单元和要素定义如下。
(1)航母运动状态获取。一般由舰载多套惯性导航系统负责,为自动着舰的重要交联系统,不直接属于自动着舰系统。为自动着舰系统提供航母运动参数(航行运动、浮沉、纵摇和横摇等),有两方面用途:一是对着舰雷达测得的飞机目标数据进行惯性稳定处理,隔离航母平台的运动;二是用于甲板运动补偿。
(2)着舰雷达是自动着舰系统的主要传感器,搜索、跟踪目标飞机,获得在雷达传感器坐标系下的初始相对位置参数。
(3)理想轨迹偏差计算。由舰载的计算机实现,利用舰载惯导系统获得的航母运动状态参数,对着舰雷达测得的初始相对位置参数进行稳定处理、航母坐标变换(由探测器坐标系转换为理想着舰点坐标系)、飞机坐标变换(由传感器信标转换为拦阻钩,需要输入飞行型号),并计算求得飞机拦阻钩相对于理想下滑轨迹的偏差,用于引导飞机自动进近和在显控台/飞机驾驶舱显示。
(4)甲板运动补偿。由舰载部分实现,在飞机即将着舰前引入着舰引导控制回路,利用舰载惯导系统获得的航母运动状态参数,对理想轨迹偏差进行甲板运动补偿,输出经补偿的偏差数据,引导飞机的进近下滑与甲板运动实现同步。
(5)数据链。在航母、飞机之间建立信息传输链路,可不专属于自动着舰系统。自动着舰系统经数据链由航母向飞机传送轨迹偏差,用于引导飞机进近,并传输系统运行状态、飞机飞行状态、指令等信息,用于最终进近管制员、LSO和飞行员进行系统监控和控制。
(6)轨迹引导律。由机载自动飞行计算机(或功能软件)实现,采用系统舰载部分经数据链传来的轨迹偏差作为输入,通过采用高度变化率、横向位置变化率的引导律软件(具有舰尾流抑制能力),生成飞行引导指令,用于飞机的飞行控制。
(7)着舰飞行控制律。由机载飞行控制计算机实现,采用来自轨迹引导律的引导指令,生成作动控制指令,控制飞机各飞行作动器-作动面运动,从而控制飞机运动,消除飞机相对于下滑道的偏差。
(8)舰载部分人机接口。包括舰载的最终进近管制员、LSO接口。
(9)飞机人机接口。
2.2差分卫星定位引导自动着舰系统架构
与上述第二类着舰引导技术不同,差分卫星定位技术不受舰载主传感器的作用距离限制,系统作用范围主要取决于数据链技术。由于数据链的作用距离较大,差分卫星定位引导可以覆盖整个航母管制空域。通过增加作用距离更远的归航数据链,卫星定位还可以满足飞机归航的引导需要。
差分卫星定位引导自动着舰系统有两种可选的总体架构。架构1是将差分卫星定位、理想轨迹偏差计算功能由舰载部分实现,以简化系统、提高可靠性、降低费用和研制风险,但需要较高带宽的数据链。架构2是把差分卫星定位、理想轨迹偏差计算功能在每架飞机上实现,这导致系统复杂性提高、可靠性下降,且研制费用和风险均增大,并增大了飞机质量、空间、改装工作量等方面的压力。
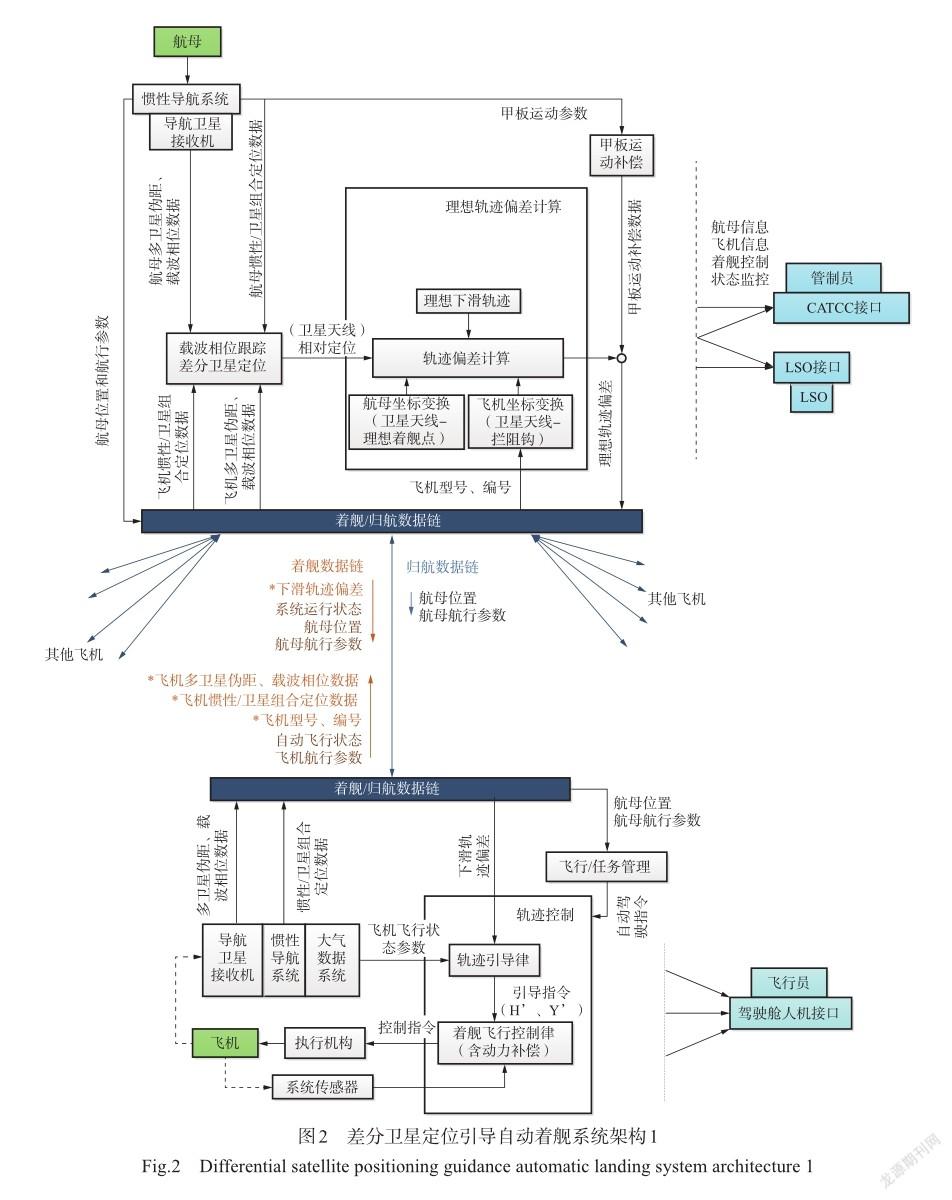
差分卫星定位引导自动着舰系统架构1如图2所示。架构1中主要功能单元和要素定义如下。
(1)惯性导航系统/导航卫星接收机(舰载)是差分卫星定位的航母端传感器,惯性导航与导航卫星组合获得连续的高质量位置信息,同时由卫星接收机输出多卫星伪距、载波相位信息,用于载波相位差分卫星定位。输出甲板运动参数用于甲板运动补偿和轨迹偏差计算。输出的高质量位置信息和航行参数还用于归航数据链发送。
(2)甲板运动补偿(同雷达引导)。由舰载部分实现,在飛机即将着舰前引入着舰引导控制回路,利用舰载惯导系统获得的航母运动状态参数,对理想轨迹偏差进行甲板运动补偿,输出经补偿的偏差数据,引导飞机的进近下滑与甲板运动实现同步。
(3)载波相位跟踪差分卫星定位。由舰载系统实现,接收航母端卫星数据、经数据链传来的飞机端卫星数据,进行载波相位跟踪差分卫星定位处理计算,输出母舰(卫星天线)与飞机(卫星天线)的精确相对位置,这是机-舰原始相对定位数据。
(4)理想轨迹偏差计算(同雷达引导)。由舰载系统实现,综合航母运动参数,对差分卫星定位得到的原始相对定位数据进行处理,并进行航母坐标变换(由卫星天线坐标系转换为理想着舰点坐标系)、飞机坐标变换(由卫星天线位置转换为拦阻钩位置),求得飞机拦阻钩相对于理想下滑轨迹的偏差,经数据链发送至飞机用于进近引导,并在航母进近管制台、LSO显控台和飞机驾驶舱显示。
(5)着舰数据链。在航母、待回收飞机之间的信息传输链路,可覆盖整个航母管制空域。经由该数据链,飞机向航母传送卫星信息、航行信息用于卫星差分定位运算,航母向飞机传送经计算得到的下滑轨迹偏差。该数据链还传送舰、机航行参数、自动着舰系统工作状态等信息,用于最终进近管制员、LSO和飞行员进行系统监控和控制。
(6)轨迹引导律(同雷达引导)。由机载自动飞行计算机实现,采用轨迹偏差作为输入,通过采用高度变化率、横向位置变化率的引导律软件(具有舰尾流抑制能力),生成飞行引导指令,用于飞机的飞行控制。
(7)着舰飞行控制律(同雷达引导)。由机载飞行控制计算机实现,采用来自轨迹引导律的引导指令,生成作动控制指令,控制飞机各飞行作动器-作动面运动,从而控制飞机运动,消除飞机相对于下滑道的偏差。
(8)归航数据链。是一个单通道广播式低截获概率数据链,可向370km外飞机提供基于卫星定位的母舰位置,用于引导飞机归航,不直接用于自动着舰。F28D078E-4D12-408B-BC04-00A5C1D35B94
(9)飞行/任务管理。由飞机飞行管理或任务管理系统实现,在经归航数据链获得航母位置、航行参数之后,进行归航规划、计算,生成自动驾驶指令,引导飞机归航。
(10)舰载部分人机接口(同雷达引导)。包括舰载的最终进近管制员、LSO接口。
(11)飞机人机接口(同雷达引导)。
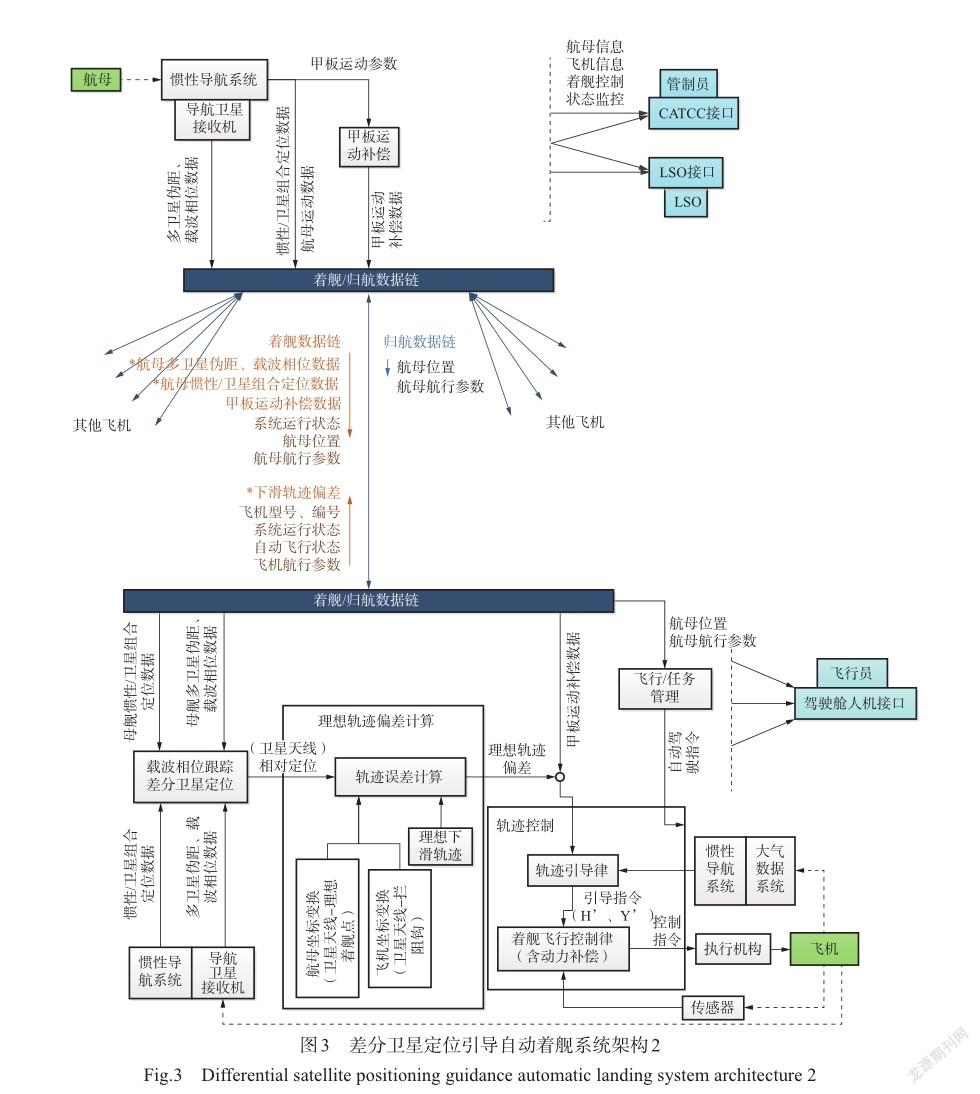
差分卫星定位引导自动着舰系统架构2如图3所示。架构2中主要功能单元和要素定义如下。
(1)惯性导航系统/导航卫星接收机(舰载),与架构1相同。
(2)甲板运动补偿。由舰载系统实现,与架构1相同。但输出的对理想轨迹偏差的补偿数据需经数据链传送至飞机端,由飞机端控制其接入。
(3)载波相位跟踪差分卫星定位。由机载系统实现,这是与架构1的一个主要区别。接收来自数据链的母舰卫星数据、来自机载系统的飞机卫星数据,进行载波相位跟踪差分卫星定位,输出母舰(卫星天线)与飞机(卫星天线)的精确相对位置,这是自动着舰系统的相对定位原始数据。
(4)理想轨迹偏差计算。由机载系统实现,这是与架构1的又一个主要区别。求得的飞机拦阻钩相对于理想下滑轨迹的偏差,直接在机上用于自动着舰控制和驾驶舱监控显示,并经数据链传送至航母用于进近管制和LSO监控。
(5)着舰数据链。在航母、飞机之间传输着舰信息。因系统功能划分和架构不同,架构1和架构2在着舰数据链上传输的信息有显著不同,这是两种架构的核心区别所在。
(6)轨迹引导律(同雷达引导),与架构1相同。
(7)着舰飞行控制律(同雷达引导),与架构1相同。
(8)归航数据链。与架构1相同。
(9)飞行/任务管理:与架构1相同。
3多模式引导全自动着舰系统顶层架构
与雷达引导自动着舰技术相比,差分卫星引导技术具有精度高、覆盖范围大、容量大、能够为飞机回收各管制岗位提供透明的进近态势等优势。但是差分卫星作为技术基础卫星,也存在定位易受干扰以及数据链技术具有开放性等特征,导致其抗干扰能力不足。在数据链故障情况下,系统不能完成差分卫星定位。这决定了仅采用差分卫星定位引导技术实现舰载机回收,在高强度战场对抗环境中,可能会发生严重故障,丧失关键功能,导致系统完全不可用。
然而,考虑到着舰雷达的工作局限在航母邻近的很小局部空间内,不像差分卫星定位那样整个完整功能系统扩展到了包含卫星的外部空间,在高威胁强度环境中具有更强的生存性、适用性。而且着舰雷达可以独自完成舰机的相对定位,不需要数据链的支持。可以通过着舰雷达弥补差分卫星引导技术的不足。
因此,基于雷达引导自动着舰系统和差分卫星定位引导自动着舰系统架构发展了以差分卫星定位引导技术为主的多模式引导自动着舰系统架构。将雷达引导、差分卫星引导的系统架构相综合,以差分卫星定位引导为主用、以着陆雷达引导为备用,形成多模式引导自动着舰系统架构。
本节所讨论的全自动着舰系统顶层架构基于以下配置,包括主用的基于导航卫星定位的归航数据链(引导飞机归航)和差分卫导自动着舰系统(引导飞机进场、进近和自动着舰),以及备用的塔康(引导飞机归航、进场、进近)和雷达引导自动着舰系统(引导飞机自动着舰)。
3.1以差分卫星定位引导技术为主的多模式引导自动着舰系统架构
在对上述基于不同引导技术的系统架构设计中进行单元/元素的舰载、机载划分时,已初步考虑了同时采用两种引导模式的需求,轨迹引导律、着舰飞行控制律均由机载部分实现。按照差分卫星定位引导主用、着陆雷达引导备用进行多模式引导综合,基于差分卫导架构1得到多模式引导全自动着舰系统架构1(简称多模式引导架构1),如图4所示。在多模式引导架构1中,主要功能单元與图1、图2中基本相同,补充定义如下。
(1)雷达信标(机载)/着舰雷达+雷达数据稳定处理(舰载)。同雷达引导架构。其中,数据稳定处理属于常规的雷达功能,故由着舰雷达单元综合实现。所需航母平台运动参数由舰载惯性/卫星组合导航系统提供。
(2)惯性导航系统+导航卫星接收机。同差分卫导架构1和架构2。采用卫星导航技术,航母、舰载机需分别配备,并进行惯性/卫星相组合,以利于进行载波相位跟踪差分卫星定位的信号处理计算和提供连续的高精度差分定位。
(3)载波相位跟踪差分卫星定位。同差分卫导架构1,由舰载系统实现。
(4)理想轨迹偏差计算。它是雷达引导架构、差分卫导架构1中相应单元的综合,由舰载系统实现。该单元是多模式引导的核心,主要完成航母坐标变换、飞机坐标变换、轨迹偏差计算、引导技术模式选择逻辑等功能。
(5)甲板运动补偿。同雷达引导架构、差分卫导架构1和架构2。由舰载部分实现,同时负责适时在引导控制回路中引入甲板运动补偿。
(6)数据链。着舰数据链同差分卫导架构1,传输内容可涵盖雷达引导架构的数据链。归航数据链同差分卫导架构1和架构2。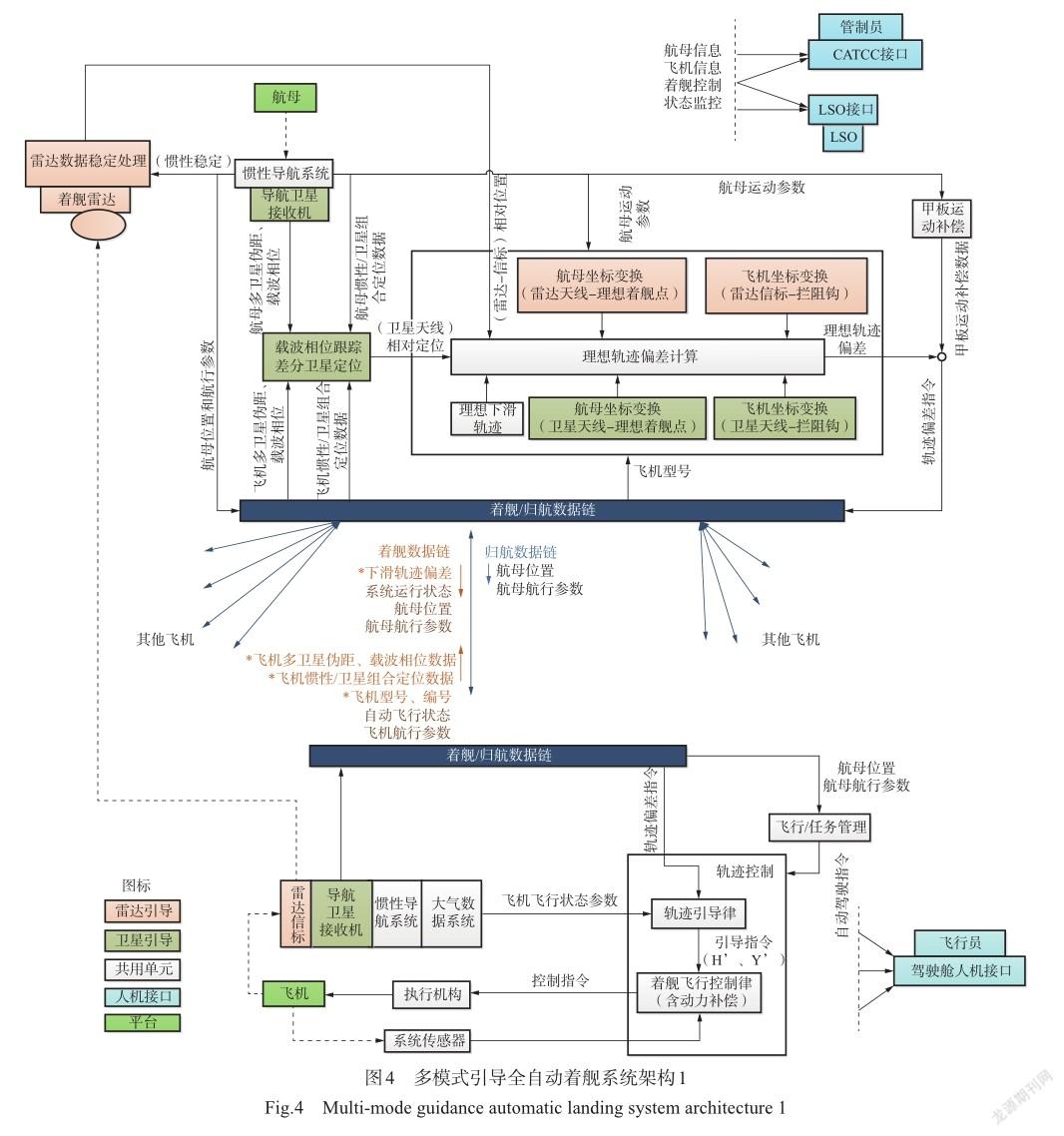
(7)飞行/任务管理。同差分卫导架构1和架构2,基于接收到的航母位置和航行数据进行水平导航,引导飞机归航。
(8)轨迹引导律、着舰飞行控制律(含动力补偿)。同雷达引导架构、差分卫导架构1和架构2。属于机载系统的轨迹控制。
基于差分卫导架构2得到多模式引导全自动着舰系统架构2(简称多模式引导架构2),如图5所示。87立在多模式引导架构2中,主要功能单元与图1、图3中基本相同,补充定义如下。
(1)雷达信标(机载)/着舰雷达(舰载)。同雷达引导架构。F28D078E-4D12-408B-BC04-00A5C1D35B94
(2)理想轨迹偏差计算(雷达)。同雷达引导架构。雷达数据稳定处理作为一项计算机数据处理任务,与理想轨迹偏差计算的其他单元一起,由同一台计算机设备完成。所需航母平台运动参数由舰载惯性导航/导航卫星的组合系统提供。
(3)雷达引导模式下的飞机坐标变换、甲板运动补偿接入控制均由舰载部分实现。
(4)甲板运动补偿。同雷达引导架构,输出直接用于对雷达引导理想轨迹偏差进行修正,并经数据链传输至飞机用于对差分卫导理想轨迹偏差进行修正。
(5)惯性导航/导航卫星接收机。同多模式引导架构1、差分卫导架构1和架构2。航母、舰载机需分别配备。
(6)载波相位跟踪差分卫星定位。同差分卫导架构2,由机载系统实现。
(7)理想轨迹偏差计算(差分卫星)。同差分卫导架构2,由机载系统实现。
(8)引导技术模式选择逻辑。采用多模式引导后新增的逻辑功能单元,由机载系统实现。选择逻辑功能主要包括:依据着舰雷达系统工作状态和探测得到的目标轨迹质量,判断雷达引导的可用性;依据航母和飞机导航卫星数据可用性、系统工作状态和探测得到的目标轨迹质量,判断差分卫星引导的可用性;对两种引导模式的轨迹偏差自动交叉检查,进行多模式运行状态监控。该逻辑判断由机载系统自主、独立完成,通过执行设定的判断逻辑,选定雷达引导轨迹偏差、差分卫导轨迹偏差之一,用于引导舰载机自动着舰,并经数据链向舰载系统报告。
(9)数据链包括着舰数据量和归航数据链。
(10)飞行/任务管理。同多模式引导架构1、差分卫导架构1和架构2,基于接收到的航母位置和航行数据进行水平导航,引导飞机归航。
(11)轨迹引導律、着舰飞行控制律(含动力补偿)。同多模式引导架构1、差分雷达引导架构、差分卫导架构1和架构2。属于机载系统的轨迹控制。
3.2多模式引导自动着舰系统两种架构的比较
在3.1节两种多模式引导自动着舰系统架构的基础上,对差分卫导架构1、架构2进行了研究和对比,所得结果如下。
(1)功能单元配置不同
在差分卫导架构1中,载波相位跟踪差分卫星定位解算、理想轨迹偏差计算、甲板运动补偿接入控制由舰载系统实现,为所有舰载机的引导着舰所共用。
在架构2中,载波相位跟踪差分卫星定位解算、理想轨迹偏差计算、甲板运动补偿接入控制由机载实现,为载机自身所用,在每架飞机上均需配置。
从整个航母以及多架舰载机的SOS视角来说,架构1比架构2简单。相比架构2,架构1整个系统软硬件配置数量少,系统简单,整体可靠性高。
(2)着舰数据链传输能力需求不同
架构1需向舰载系统传输所有进场飞机的卫星数据(多卫星伪距和载波相位),因卫星数据量较大、批次回收舰载机数量较多,导致数据传输需求较大。
架构2需向所有进场飞机同时传输航母的卫星数据(多卫星伪距和载波相位),可采用广播方式传输,故数据传输需求较少。
(3)多模式引导兼容性不同
差分卫导架构1与雷达引导架构具有最大的相似性,具有更好的多模式兼容性,便于综合实现多模式引导。架构2与雷达引导架构的舰-机相对精确定位、理想轨迹偏差计算、甲板运动补偿接入控制等核心单元的舰-机分配不同,综合实现多模式引导的难度较大。另外,由于架构1中两种引导模式的核心和主要部分均在舰上,在不同引导模式的判断选择、备份、转换方面,比架构2更容易实现。
4结束语
雷达引导技术和差分卫星定位引导技术是目前已经达到基本成熟或初步验证可行的全自动着舰引导技术。本文基于雷达引导自动着舰系统和差分卫星定位引导自动着舰系统架构发展了以差分卫星定位引导技术为主的多模式引导自动着舰系统架构。对基于两种差分卫星定位引导技术架构为主的多模式引导自动着舰系统架构进行了比较。架构1数据传输量更大,但整个系统软硬件配置数量少,系统简单,整体可靠性高,并且具有更好的多模式兼容性。综合来看,以差分卫星定位引导技术架构1为主的多模式引导自动着舰系统架构更优,可为全自动着舰技术的工程应用提供参考。
参考文献
[1]张智,朱齐丹,张雯.航母舰载机全自动引导着舰技术[M].哈尔滨:哈尔滨工程大学出版社,2016. Zhang Zhi, Zhu Qidan, Zhang Wen. Automatic guided landing technology of aircraft carrier based aircraft[M]. Harbin: Harbin Engineering University Press, 2016. (in Chinese)
[2]Huff R,Martorella P,Mcneill W,et al. Carrier landing simulation results of precision flight path controllers in manual and automatic approach[C]//Proceedings of the 10th AIAA Atmospheric Flight Mechanics Conference,Reston:AIAA,1983:1-9.
[3]Davies W D T,Noury R. AN/SPN-42 automatic carrier landing system:AD74-35209[Z]. New York:Bell Aerospace Company,1974.
[4]Urnes J M,Hess R K. Development of the F/A-18A automatic carrier landing system[J]. Journal of Guidance,Control,and Dynamics,1985,8(3):289-295.F28D078E-4D12-408B-BC04-00A5C1D35B94
[5]武恒州,罗福平,石星辰,等.全自动着舰技术现状与发展趋势分析[J].飞机设计, 2020 , 40 (6) : 1-5. Wu Hengzhou,Luo Fuping,Shi Xingchen,et al.Analysis on the status quo and development trend of automatic carrier landing technology[J]. Aircraft Design,2020,40 (6): 1-5. (in Chinese)
[6]甄子洋,王新华,江驹,等,舰载机自动着舰引导与控制研究进展[J].航空学报, 2017,38(2):127-148. Zhen Ziyang, Wang Xinhua, Jiang Ju, et al. Research progress in guidance and control of automatic carrier landing of carrierbased aircraft[J]. Acta Aeronautica et Astronautica Sinica,2017, 38(2):127-148. (in Chinese)
[7]曲冬才,周胜明.舰载机起飞技术研究[J].航空科学技术, 2004(4) : 27-28. Qu Dongcai, Zhou Shengming. Study of technologies of shipboardplanetakingoff[J]. AeronauticalScience& Technology, 2004(4): 27-28. (in Chinese)
[8]张志冰,甄子洋,江驹,等.舰载机自动着舰引导与控制综述[J].南京航空航天大学学报, 2018,50(6):734-744. Zhang Zhibing, Zhen Ziyang, Jiang Ju, et al. Review on development in guidance and control of automatic carrier landing of carrier based aircraft[J]. Journal of Nanjing University of Aeronautics & Astronautics,2018,50(6) :734-744.(in Chinese)
[9]王钱生.舰载机总体设计主要关键技术概述[J].飞机设计, 2005(2):6-10. Wang Qiansheng. Critical technologies in carrier-based aircraft design and development[J]. Aircraft Design,2005(2):6-10.(in Chinese)
[10]劉广,颜世伟,李海旭,等.国外航母航空保障技术发展现状[J].航空科学技术,2020,31(2):1-11. Liu Guang,Yan Shiwei,Li Haixu,et al. Aviation support tech‐nology development for foreign aircraft carrier[J]. Aeronautical Science & Technology,2020,31(2):1-11. (in Chinese)
[11]张健,潘华,姜程亮,等.舰载战斗机夜间着舰引导方式初步研究[J].航空科学技术,2017,28(11):10-14. Zhang Jian, Pan Hua, Jiang Chengliang, et al. Preliminary researchonthecarrier-basedaircraftnightlanding[J]. Aeronautical Science & Technology,2017, 28(11): 10-14. (in Chinese)
[12]赵荣,王立新,徐王强.小型飞机自动着舰系统设计准则适用性分析[J].北京航空航天大学学报, 2017, 43 (12) : 2488-2496. Zhao Rong, Wang Lixin, Xu Wangqiang. Analysis of design principle adaptability to automatic carrier landing system of light plane[J]. Journal of Beijing University of Aeronautics and Astronautics,2017,43 (12): 2488-2496. ( in Chinese )
[13]王永庆.固定翼舰载战斗机关键技术与未来发展[J].航空学报, 2021, 42(8):21-34. WangYongqing.Fixed-wingcarrier-basedaircraft:key technologies and future development[J]. Acta Aeronautica et Astronautica Sinica,2021,42(8):21-34. (in Chinese)
[14]胡小兵,周大鹏,曲晓雪.国外舰载机全自动着舰技术综述[J].飞机设计, 2021, 41(2):32-36. Hu Xiaobing, Zhou Dapeng, Qu Xiaoxue. Review on full automatic carrier landing technique of foreign shipboard aircraft[J].Aircraft Design,2021,41(2):32-36. (in Chinese)F28D078E-4D12-408B-BC04-00A5C1D35B94
[15]吳文海,拜斌,范海震,等.基于光电引导的全天候自动着舰模式研究[J].飞行力学, 2013, 31(2):126-129,134.Wu Wenhai, Bai Bin, Fan Haizhen, et al. Research on allweather automatic carrier landing based on opto-electronic guidance[J]. Flight Dynamic, 2013, 31(2): 126-129, 134. (in Chinese)
[16]陈宣仪,刘刚,洪冠新.舰载机返航着舰的关键点和关键要素的分解与分析[J].飞行力学, 2011, 29(2):20-24. Chen Xuanyi, Liu Gang, Hong Guanxin. Selection and analysis of key points and factors in carrier aircraft landing process[J]. Flight Dynamics, 2011,29(2):20-24. (in Chinese)
[17]朱齐丹,邱兵,林圣琳,等.舰载机全自动着舰纵向控制系统设计[J].计算机仿真, 2014,31(11):69-73, 78. Zhu Qidan, Qiu Bing, Lin Shenglin, et al. Design of longitudinal control in automatic carrier landing system[J]. Computer Simulation, 2014,31(11):69-73,78. (in Chinese)
[18]张杨,吴文海,汪节,等.舰载无人机自动着舰系统建模与仿真研究[J].飞行力学, 2018, 36(4):69-72. Zhang Yang, Wu Wenhai, Wang Jie, et al. Study on modeling and simulation of carrier-based UAV for ACLS[J]. Flight Dynamics, 2018, 36(4):69-72. (in Chinese)
[19]赵荣,王立新,徐王强.小型飞机自动着舰系统设计准则适用性分析[J].北京航空航天大学学报,2017,43 (12) : 2488-2496. Zhao Rong, Wang Lixin, Xu Wangqiang. Analysis of design principle adaptability to automatic carrier landing system of light plane[J]. Journal of Beijing University of Aeronautics and Astronautics,2017,43(12) : 2488-2496. ( in Chinese )
Research on the Top-Level Architecture of the Automatic Carrier Landing System for Carrier Aircraft
Geng Yansheng,Luo Laibin,Liu Ximei,Wang Wei AVIC The First Aircraft Design Institute,Xian 710089,China
Abstract: Taking the technology in automatic carrier landing as the research object, this paper analyzes the technical principle of the automatic carrier landing and the main functional units and elements of the architecture to achieve radar guidance automatic landing system and differential satellite positioning guidance automatic landing system. Then, based on differential positioning guide technology, this paper develops two kinds of multi-mode guidance automatic landing system architecture to make up the disadvantages of the differential satellite positioning guided automatic landing system with weak anti-interference ability and the possible loss of key functions in battlefield environment. The two architectures based on differential satellite positioning guidance technology are compared. The results show that multi-mode guidance architecture 1 has the characteristics of simpler system and better compatibility. The research work has certain engineering guidance value for the top-level architecture design of automatic landing system of carrier-based aircraft and the realization of safe, orderly and efficient landing of carrierbased aircraft on aircraft carrier.
Key Words: carrier aircraft; automatic carrier landing; top-level architecture; multi-mode guidance; differential satellite positioningF28D078E-4D12-408B-BC04-00A5C1D35B94