
智能物流搬运小车
2022-07-04 21:01李淼鑫刘炎杨刘竟波项波
科学与财富 2022年6期
李淼鑫 刘炎杨 刘竟波 项波

摘 要:近年来随着电商的崛起,快递物流行业也进行了翻天覆地的变化,各大小省市每天的物流量也在逐年增涨,但是各地的物流分拣依旧依靠人工进行,如今已经进入智能化,自动化的时代,人工分拣不仅会出现分拣错误的情况,而且工作效率很低,所以一款可以智能分拣的机器人就显得尤为重要。该项目为一款智能化物流搬运机器人,机器人内部集成有一款高自由度且带位置反馈的机械臂,可以连接网络接收搬运任务,物流识别系统,以及一些其他功能。同时项目相比较市面其他机器人,具有研发成本低,操作简单,工作效率高等特点。别项目的研发致力于解决物流货物分拣和搬运问题,帮助各地区物流分拣人员提高效率,节省人工资源,将智能机器人融入人们的日常生活中。
关键词:智能化; 自动化; 分拣机器人
1 引言
目前物流行业中,主要的劳力环节集中在物流分拣和搬运方面,但是由于近年来国家日益发展,人民生活水平的提高,体力劳动者也渐渐减少,并且随着时间的推移,体力劳动只会更加罕见,而这些最基础的工作又不能缺失,所以这些纯体力劳动的工作必然要被机器所代替,同时使用机器不仅可以节省财力,也能保证人员安全,更加省心省力。
2 原理与设计
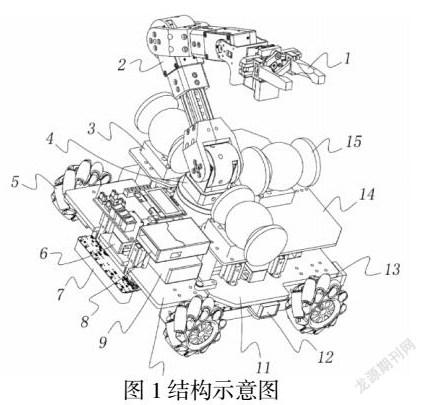
项目的设计理念是打造一款可以通过互联网技术物流任务,对物流进行搬运和分拣,进而节省劳动力;机器人设计为三段结构,为了能够实现物流平稳运输和机器人的全方位移动,机器人底盘采用二段式车辆设计,使用麦克纳姆轮实现全方位移动;二层为空置层,设计有货物卡扣结构,保证物流在运输过程中的稳定;第三层安装多自由度机械臂,实现物流搬運过程,同时机械臂具备位置反馈功能,可进行遥控教点,控制方式简单等特点(结构如图1所示)。
3 硬件设计与实现
3.1硬件设计
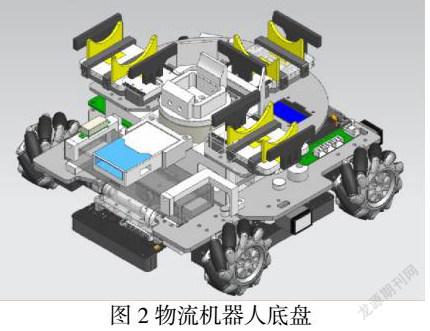
该智能物流搬运小车的硬件设计使用多片STM32单片机相互协调进行工作、使用ESP8266连接物联网领取物流任务码、利用openmv进行物流识别、采用工业级飞特总线舵机自行设计机械臂,使用特制的遥控手柄可以进行位置校点、使用麦克纳姆轮可实现全方位移动如图2所示,同时电机使用三项无刷电机,已进行速度闭环处理。
产品使用绿色能源,使用12V航模电池进行供电,首先通过三个工业级降压模块分多路降低为7.2V、5V、3.3V,其中机械臂和电机使用12V电源,机械爪使用7.2V供电,5V为传感器,显示和物料识别电源,3.3V为单片机工作电压;整个作品中共使用了7片单片机,其中四片进行路径识别,一片用了图像识别,一片用来位置识别,一片用来处理所有数据;制作过程中考虑到电源干扰,将电路板进行了分例设计,其中主控电路为单独一辆,并且大部分为信号线,传感器也为小电流传感器,另外一块为驱动板,整个机器人运动中产生的大电流多从此电路板中发出,保证信号的纯净,并且可能在运动中产生大电流的设备信号线进行单向处理,使其无法形成反击电动势击坏单片机。
3.3机械臂设计
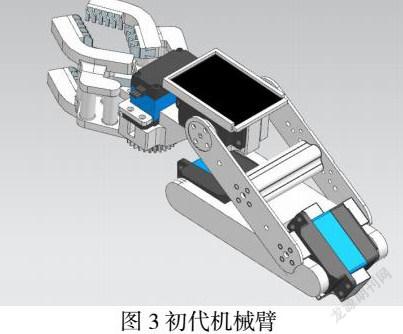
我们根据物理力学知识和参考目前市面上成熟的工业机械臂,决定采用三段式的结构进行设计,在想法初立阶段,我们设计了图3中的机械臂,该机械臂其实已基本满足了我们的使用需求,但是在实际使用中,我们发现机械臂存在抖动现象,同时在不改变此机械臂结构的基础了进行了多款舵机测试,均存在此问题,同时在使用中舵温度过高。
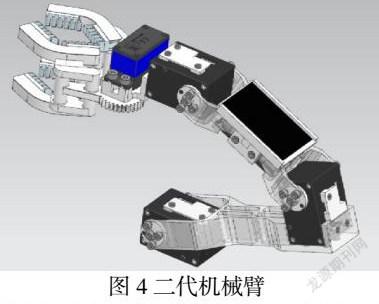
机械臂抖动无疑会增加分拣的准确性,通过力矩计算,我们发现初代机械臂存在不合理的设计,于是在数据的加持下我们设计了第二款机械臂,并采用总线舵机,使用总线舵机的好处是我们可以随时得知机械臂各关节的相应位置,并且与理想位置进行偏差计算,实现机械臂的位置闭环,这样的处理无疑使机械臂的准确度实现质的变化,图4是我们的二代机械臂。
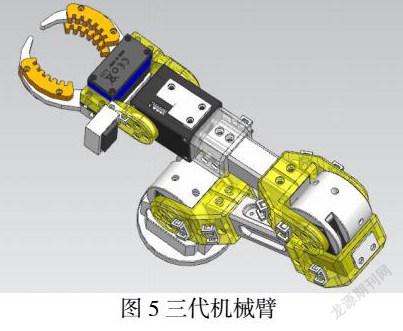
但是二代机械臂在长时间工作下依旧会出现抖动问题,相比较初代机械臂虽然提升了不少,但是依旧有改进空间,于是我们设计了图5所示的第三代机械臂,该款机械臂添加了可条件力臂和关节的功能,可自主修改臂长,同时保留的二代机械臂的特点,同样使用总线舵机,可实现闭环操作。
3.4手抓设计
由于机械的局限性,我们实验了多种手抓的设计方式,但是除了仿生手外没有其他的结构可实现万能抓取,最终我们决定拓展受力面积来稳固物料抓取,就是在机械爪的上面和下面添加树脂打印的防滑齿,我们可以根据物料来修改手抓上的防滑齿,进行不同物料的搬运如图6所示。
3.5程序流程
机器人在未送到搬运指令前,在任务等待区等待搬运任务码的发起,等到发送任务码后机器人获得出发指令,前往货车停靠处搬运物流到消毒场所进行消毒处理,而后扫描物流上的二维码,获取二维码上的二级地区,进行第二次搬运和分拣,当前任务完成后,返回任务等待区等待系统发放新的任务。
整个搬运过程及如上所示,但为了使货物搬运准确,我们还需要进行图像处理和寻路识别,通过自制的九路寻迹传感器,可以在不同环境下学习当前环境的光线,和阈值进行对比,而后把传感器收到的模拟值转换成数字值,把信号发送给主处理器,图像处理的方法与其类似。
4 结 论
如今社会,人民依旧还处在一个探索阶段,并且我国人民还未能把自动化和智能化与自己的生活结合起来,虽然目前社会的主要劳动力还是一些85后、90后,但是早晚会有年轻的一代接手这个社会,可是如今的新一代青年多半是娇生惯养长大的,他们的思维活跃,实现自动化的重担必将由他们担起,到那时,一些繁琐的劳动就会被机器人所代替,所以我们处于时代的开始,是一个探索阶段,未来会有更好的自动化、智能化的产品面世,我们需要不断学习,不断创新,才能不被这个社会所淘汰;本产品方便二次开发,未来的发展也会向模块化方向拓展,使机器人可以适应更多情况的实用。
参考文献
[1]董小雷,李冬梅.自动送货机器人结构设计[J].机械工程与自动化.2020(01).
[2]孙静,叶紫萱,高杰,韦清鹏,赵成凯.一种光电循迹的搬运机器人电路设计[J].福建电脑.2021(11).
[3]徐昊天.智能物料搬运小车的设计[J].新型工业化.2021(03).
[4]陈文科,高艳雯,陈志,王志.模糊PID控制在万向电动底盘上的应用[J].机械工程学报.2014(06).
天津市大学生创新创业训练计划资助项目,项目编号:0808
猜你喜欢
军事文摘(2022年19期)2022-10-18
建材发展导向(2021年13期)2021-07-28
印刷工业(2020年4期)2020-10-27
印刷工业(2020年4期)2020-10-27
中国交通信息化(2017年4期)2017-06-06
能源(2015年8期)2015-05-26
