
一种水上管道去污机器人的设计
2022-07-04 06:04王奕帆赵泽鑫马诗晏翁积宏蔡武炜
科学与财富 2022年6期
关键词:硬件设计
王奕帆 赵泽鑫 马诗晏 翁积宏 蔡武炜
摘 要:随着科学技术的发展,智能控制技术愈加成熟,智能机器在生活中的比重越来越大,市场对水上管道智能巡检机器人[1]的需求也愈来旺盛,智能巡检机器人的研发顺应了时代发展的潮流。文章提出一种水上管道去污机器人的设计,该机器人包含总控系统,总控系统首先通过摄像头实时采集水上管道图像,接着利用图像处理模块对画面进行分析,最后判断是否需要对管道进行去污,从而解决水上管道检测、清理的问题。
关键词:智能巡检;图像采集与处理;硬件设计
引言
近年来,城市建设进程加快,水下管道体系更加错综复杂。一旦部分水下管道出现问题,便可能影响整个水下管道的运作。同时,水下管道作为城市系统的重要组成部分,直接影响居民的日常生活。在这一领域的技术水平发展较为缓慢。水下管道通常会安装管道检测仪,监测管道情况。然而,在管道检测仪不到位的情况下,常常需要进行人工检测和维修。随着经济的高速发展,人工处理成本也越来越高。使用机器检测,有助于减少工作人员的工作量、降低工作难度、提高工作效率。针对上述问题,文章提出一种管道去污机器人的设计,从而保证对水下管道检测、清理的高效性。
1 装置介绍
该装置由總控系统、摄像头、推进电机和机械爪四部分组成。总控系统包含电源模块、图像处理器、微控制器和电机驱动四部分部分。
2 总控系统介绍
2.1电源模块
电源模块分为两部分,第一部分为12V转5V,在12V转5V电路设计中,采用的降压芯片为TPS54302。TPS54302是一款容压差较高的降压转换器[2],有效电压输入范围为4.5V-28V,其最大输出电流可达3A。该芯片包含两个集成开关MOS并且拥有内部回路补偿。根据TPS54302数据手册,如需开启此芯片且输出5V电压,必须使得使能电压 大于1.2V,且其反馈电压 等于0.6V,在本电路中开启电压计算公式以及反馈电压的计算公式分别为
2.2图像处理模块
该机器人搭载的图像处理模块为MAIX Bit开发板,MAIX Bit开发板是由SiPEED公司MAIX产品线负责开发的视觉处理器,基于嘉楠堪智科技的边缘智能计算芯片K210设计的一款AIOT开发板。开发板使用模块+底板方式设计,整洁小巧,板载Type-C接口和USB-UART电路,可以直接通过USB Type-C线连接电脑进行开发,配置128Mbit Flash、LCD、DVP、Micro SD卡等接口;MaixBit 开发板参数MaixBit 开发板以M1WAl模块作为核心单元,功能非常很强大,能够更好地支持管道去污机器人进行快速的图像处理算法。其中内核计算芯片K210采用RISC-V架构[4]64位双核设计,该模块处于工作状态时,实时接收摄像头传送的管道环境画面,接着由模块内核计算芯片K210对管道环境图像进行二值化[5],获得与吸附物颜色相同的物体的区域信息,再对区域进行形状识别,获得物体的颜色和形状信息以及坐标位置,最后将物体的颜色和形状信息以及坐标位置传回微控制器,由微控制器发出相应命令至机械爪与电机驱动,通过整体配合对当前管道进行去污处理。
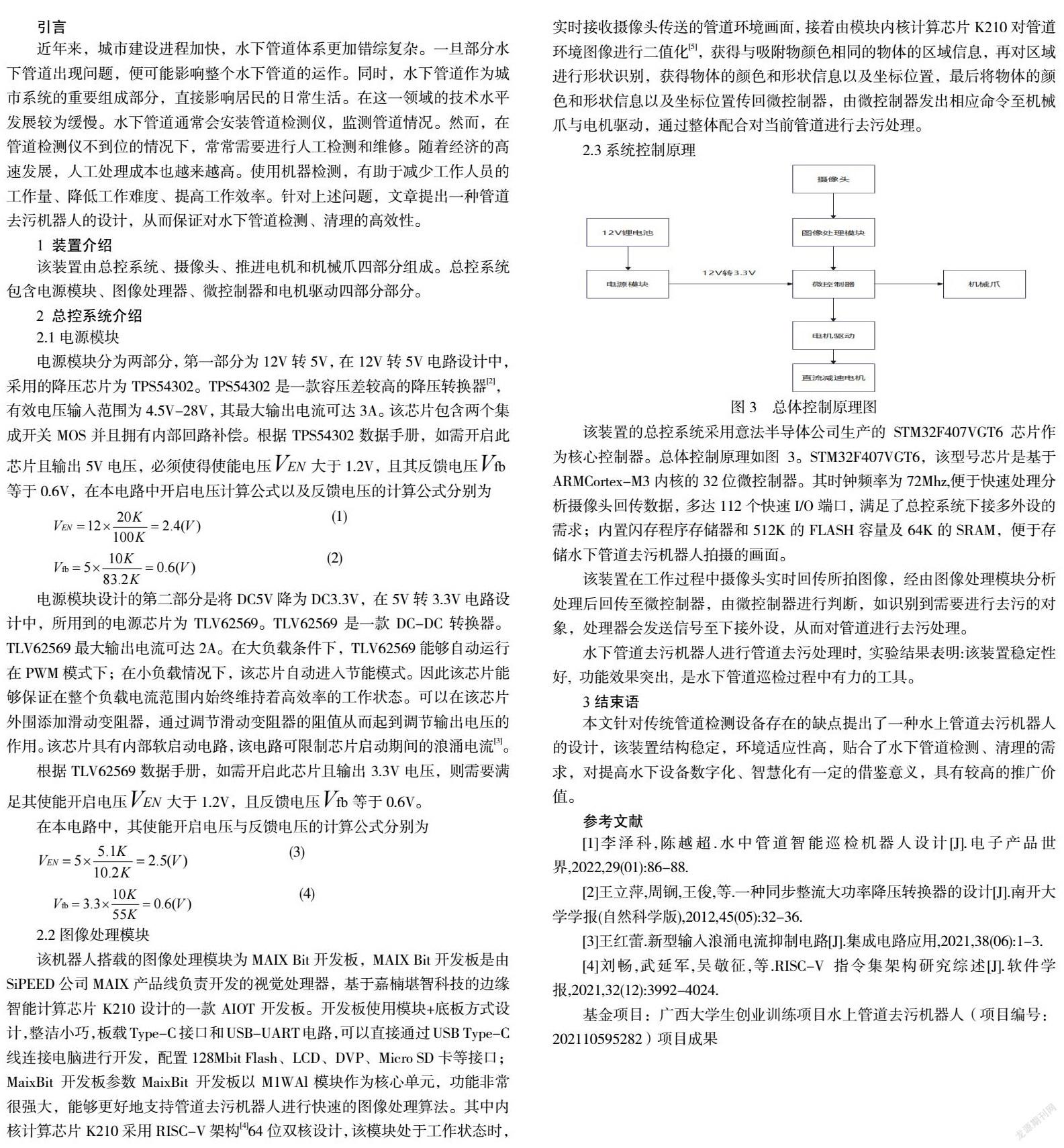
2.3系统控制原理
该装置的总控系统采用意法半导体公司生产的STM32F407VGT6芯片作为核心控制器。总体控制原理如图3。STM32F407VGT6,该型号芯片是基于ARMCortex-M3内核的32位微控制器。其时钟频率为72Mhz,便于快速处理分析摄像头回传数据,多达112个快速I/O端口,满足了总控系统下接多外设的需求;内置闪存程序存储器和512K的FLASH容量及64K的SRAM,便于存储水下管道去污机器人拍摄的画面。
该装置在工作过程中摄像头实时回传所拍图像,经由图像处理模块分析处理后回传至微控制器,由微控制器进行判断,如识别到需要进行去污的对象,处理器会发送信号至下接外设,从而对管道进行去污处理。
水下管道去污机器人进行管道去污处理时, 实验结果表明:该装置稳定性好, 功能效果突出, 是水下管道巡检过程中有力的工具。
3结束语
本文针对传统管道检测设备存在的缺点提出了一种水上管道去污机器人的设计,该装置结构稳定,环境适应性高,贴合了水下管道检测、清理的需求,对提高水下设备数字化、智慧化有一定的借鉴意义,具有较高的推广价值。
参考文献
[1]李泽科,陈越超.水中管道智能巡检机器人设计[J].电子产品世界,2022,29(01):86-88.
[2]王立萍,周锎,王俊,等.一种同步整流大功率降压转换器的设计[J].南开大学学报(自然科学版),2012,45(05):32-36.
[3]王红蕾.新型输入浪涌电流抑制电路[J].集成电路应用,2021,38(06):1-3.
[4]刘畅,武延军,吴敬征,等.RISC-V指令集架构研究综述[J].软件学报,2021,32(12):3992-4024.
基金项目:广西大学生创业训练项目水上管道去污机器人(项目编号:202110595282)项目成果8A183044-E76F-4A31-B66C-98E4C5FA6920
猜你喜欢
汽车工程学报(2016年6期)2017-01-11
中小企业管理与科技·上旬刊(2017年1期)2017-01-06
中国高新技术企业(2016年31期)2016-12-22
中国高新技术企业(2016年31期)2016-12-22
科技资讯(2016年19期)2016-11-15
