
一种基于树莓派的新型智能多功用自动分类垃圾箱的设计与应用分析
2022-07-04 13:15严达黄思威
科学与财富 2022年8期
严达 黄思威
摘 要:面对中国经济已然由高速增长阶段转向高质量发展阶段这个现实,实现碳达峰、碳中和是推动高质量发展之路中的必然要求,绿色节能清洁成为了社会各界的发展转型目标。做好垃圾分类,回收并重复利用材料,提高对环境资源的利用率,降低碳排放,助力3060双碳目标的早日实现。面对社会上垃圾分拣的难点痛点,本文提出一种基于树莓派的新型智能多功用自动分类垃圾箱,通过机械结构设计创新优化,基于神经网络泛化感知,实现垃圾智能分类,自动投放,满载检测等功能,该自动分类垃圾箱的设计方案具备可行性。
关键词:垃圾投放;智能,创新设计;城市生活垃圾;
0 引言
进入20世纪以来,随着经济和生活水平的快速提高,制造业作为支撑国民经济的主体,一方面为人类进步和发展,积累并创造巨大财富做出突出贡献,另一方面也带来了温室效应,资源耗竭等问题,如今实现“双碳目标”已经成为当下全球的关注热点和创新热点。以制造业的产品生命周期为例,期间需要经历设计,制造、包装、运输、使用和回收处理六大过程。在每一过程中伴随着碳排放,而垃圾分类处理作为产品生命周期的最后一环,对于积极响应双碳目标,降低制造能源消耗,控制产品价值链间接排放有着重要意义。垃圾分类作为当今社会热点问题,对垃圾的正确分类已经成了中国当前发展的重大命题,对于帮助企业节能环保,减碳有着重要意义,同时有助于居民绿色环保理念的贯彻深入,重新构建生活消费方式。对于当前市场上存在的垃圾分类装置并不符合现代社会发展的需要,例如体积庞大,只适合在公共场合投放,民用普及率不够高,使用和投放成本过高等特点。
经過社会调查及研究发现,设备的小型化更有利于垃圾分类的普及和推广,所以我们在市场已有的产品基础上推出一种基于树莓派的新型智能多功用自动分类装置,利用其体积小,成本低的特点,易于大范围推广并应用,在使用过程中可以充分发挥其性能,同时对于分类好的垃圾进行处理,通过满载检测对于垃圾情况实时掌握,减少细菌滋生,降低环境污染。目前本装置的具体执行机构是挡板,无法处理类别不同的堆叠垃圾,对于单个垃圾或者同类别的可以实现自动识别和归类收集。对于收集到各类垃圾做到物尽即用,满足社会的可持续发展,助力双碳目标的实现,便利人们的生活和出行方式。
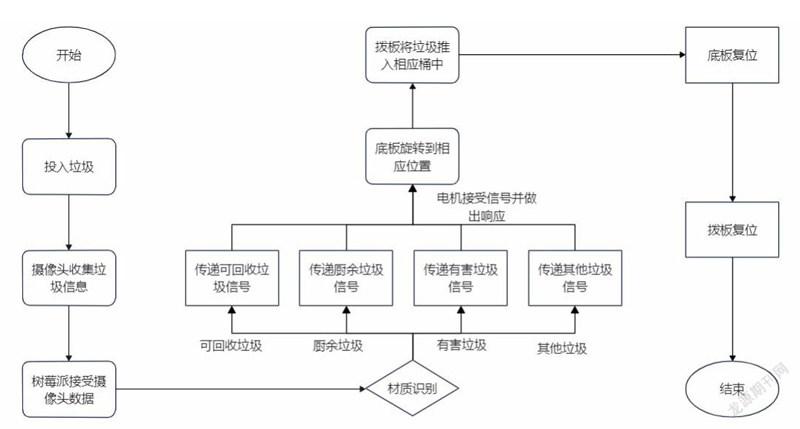
1 分类装置的工作流程设计
首先,由使用者将垃圾扔入待处理平台,设备自身携带的CSi摄像头进行识别与处理,通过建构学习模型去识别垃圾的类别,同时识别过后将命令传递到舵机1去转动相应的角度,同时反馈舵机2去转动对应的角度去完成二者之间的相互定位,在投放垃圾入桶之前,投放口的超声波传感器会对垃圾的满载情况进行检测,遇到满载情况及时反馈到前端初始化,使得舵机3无法工作。当垃圾未满载时,舵机3就会将垃圾推入所属垃圾桶类。
2工作组成系统结构设计
按照系统的设计特点,一般有如下主要功能模组:将控制端分为主控制器和副控制器两个主要部分,并选用树莓派3B+和Arduino开发板分别作为一级开发板和二级开发板的主控芯片。树莓派3B+实现基于卷积神经网络的图像分类任务,Arduino负责进行满载报警和分类动作的执行。树莓派作为主控制器,主要负责处理csi摄像头传回的图像数据。利用AlexNet模型和图像算法,对于图像中垃圾物进行判断,并将所得结果传递给 Arduino 控制器。Arduino作为副控制器,负责接收树莓派处理后的垃圾物类别信息,并依据此信息去控制电机完成相应的分拣动作。分类系统中传感器主要由csi摄像头和超声波传感器组成。摄像头结合红外补光灯,使得视野范围更大,有助于获取垃圾物的图像;超声波传感器则通过测量垃圾桶内储存的实际污物总量,是否达到了垃圾桶容积的百分之七十五从而实现满载报警。动作执行部分主要是三部步进电机,步进电机通过PID控制算法,结合驱动电路,调节电机的回转方位和角度,使电机工作实现指定角度转动以及投放口的准确重合。
3神经网络模型的选择
充分考虑了智能分类与垃圾识别设备的具体使用场合的特殊性,决定将图像技术全面部署在低功耗、易于应用的嵌入式平台树莓派3B+上。树莓派存在网络内存较少且计算力较差,所以怎样使用部署的深度学习网络模块就变得特别关键。经过对比现有的各种神经网络模型,准确率较高的模型是LeNet-5、AlexNet、VGG、ResNet,因ALexNet运行效率快并且占用存储空间少,故适合垃圾分类识别算法设计。
AlexNet在激活函数上选取了非线性非饱和的relu函数,并在双gpu上运行,每个gpu负责一半网络的运算,在relu层加入LRN,可形成某种形式的横向抑制,从而提高网络的泛华能力。池化方式采用overlapping pooling。通过八层卷积层运算提取图片特征,并利用大量数据集进行测试,提高识别准确率。
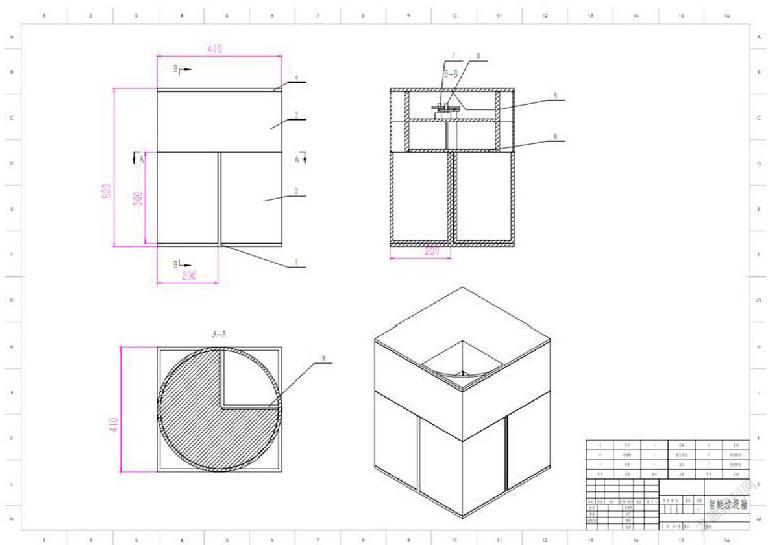
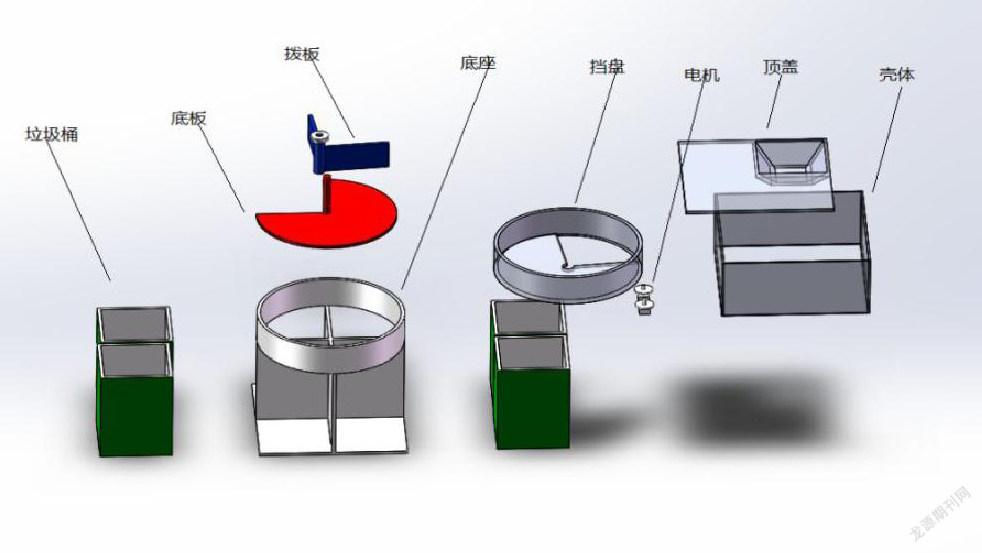
4分类装置结构设计
对于分类装置功能的实现分为垃圾桶主体、分类执行机构,壳体三大部分。使用Solidworks软件对垃圾桶的机器硬件方案设计进行了构建,机器架构包括上、中、下三层,上层结构包括垃圾投放口、蓄电池、树莓派的开发板和摄像机头;中层装有机械传动装置,包含步进电机,电磁铁、履带行车底盘和固定底座;下层安装四箱体,包含筒体。
4.1垃圾桶主体设计
垃圾桶主体选用截面为正方形的的筒体,便于后续的角度计算,减少垃圾分类的死角,提高分类效率。桶身材料采用塑料材料制成,面对分类对象的种类的复杂性,需要考虑到垃圾桶的耐腐蚀性,耐用性,经济实用型,塑料具备加工简单,价格便宜,考虑到分类装置的使用场景,塑料材料更多的适合室内使用,对于投放在室外,桶身材料需要考虑抗老化的问题。对于单个桶身尺寸方面采取200*200*300的设置,符合市面上常规售卖的尺寸,符合家用需求。
4.2分类执行机构
分类执行机构作为垃圾分类的核心机构,主要由底板、拨板、挡盘,三部步进电机构成,对于执行机构的外形设置采取圆形设置,便于执行机构的定位,执行,复位。底板与拨板之间采取同心轴连接,采用固定的交错90角度相连,可以相互活动。动力来源于两部独立控制的步进电机,当重物放置在底板上时需要较大的扭矩去带动,故中心轴和底板材料的结构强度需要足够高,考虑不锈钢材料去应用。拨板的运转只发生在底板和挡盘的相互完成定位后,拨板逆时针转动固定的90度,将待分类垃圾拨转到相应类别的垃圾桶。待完成拨转后,自动复位到初始位置,与底板形成交错角度,考虑拨板的应用场景和使用环境,材料需要考虑刚度和耐磨性,以金属材料为主。挡盘的主要作用是接受树莓派传递的类别标签,通过PID控制步进电机旋转固定的角度达到标签垃圾桶的上方,同时返回角度数值给底板提供旋转角度参数,便于定位,随后拨板进行投放步骤,当本次操作完成时,自动复原,同时利用挡盘和底板的交错角度达到密封的作用,保证分类垃圾之间不会进行异味的交织,对于挡盘的材料,我们选择塑料件去制作挡盘,考虑到挡盘的耐腐蚀,抗老化等问题。
4.3壳体部分
壳体部分包括顶盖,壳体,底座三个部分,更多的承担的是纵向的载荷,为此壳体部分的高度不宜过高,防止重心过高的现象的发生,避免分类装置倾倒。按照某市实行生活每立方米生活垃圾的重量压缩前约为0.42吨进行计算。本分类装置单桶容积12升,预计可以容纳5.04kg重量的生活垃圾,四个分类桶预计可以容纳20.16kg生活垃圾,这对于底座的承载能力提出了更高的要求,对于材料的强度和刚度有了更高的要求,对此壳体部分选用高密度聚乙烯和聚丙烯两种塑料,做到经济性与实用性兼容。
5.控制逻辑的设计
5.1 Arduino控制设计
系统通电后,首先对于Arduino 控制器及其外设进行初始化,随后将训练好的深度学习模型导入到主控制器中,便于开展后续的垃圾物识别工作。树莓派对于csi摄像头发出指令,拍照,通过训练好的深度学习模型判断图像中是否存在垃圾物,若不存在,等待下次拍照;若存在,则利用训练好的深度学习模型进行分析处理,获得当前图像垃圾物的类别。并将处理结果发送至 Arduino 控制器,控制电机进行角度方向的旋转,并完成投放。
5.2识别设计
此系统中摄像头通过排线直接与树莓派的csi接口连接,树莓派通过对摄像头的控制,对待检测的垃圾物进行拍照,并将拍摄的照片与学习模型中的垃圾种类参数比较,从而获得待检测的垃圾物的种类,并将类别结果发送至Arduino控制器,完成其他投放动作。
6.结束语
城市生活垃圾已经成为制约城市发展的一大关键因素,在新发展理念的倡导下,生活垃圾分类作为其中重要的一环,对于降低污染,减少碳排放有着重要的作用。以当前生活垃圾分类难、人工分类任务重、生活垃圾分类点利用率不足等现实状况为出发点,符合要求的科学家设计出了上文中所述生活垃圾分类装置。
该装置较传统的人工分拣方式具有如下優势:(1)装置小型化,利于家庭场景的推广应用;(2)垃圾分拣迅速,节省人力,智能化;(3)满载报警,实时监控;(4)图像识别垃圾,分类高效,神经网络算法可学习性高;(5)投放口交错设置,避免垃圾异味扩散,净化空气品质
综上所述,本设备能够更迅速地将生活垃圾进行分类,并同时避免生活垃圾臭味排放,从而改善城市空气质量,对缓解生活垃圾分类困难、费时耗力的问题有一定的帮助,并具备了相当的实际推广应用价值。
参考文献:
[1] 张浩 李淑青 杜泽英 孙悦 李鑫瑞 张宇华,基于SolidWorks的智能垃圾分类装置设计与控制,大学物理实验第34卷第4期(2021年8月),66-69
[2] 高士雅,胡晓颖,董景峰,生活垃圾分类回收处理体系及智能分类垃圾箱设计,物流技术2021年第40卷第7期,110-114
[3]刘志峰,黄海鸿,李磊,刘赟,绿色制造:碳达峰、碳中和目标下制造业的必然选择,金属加工冷加工2022年第1期,15-18
作者简介:严达(2002—)男,湖北天门人,学历:本科在读,主要研究方向:车身工程与智能制造。
黄思威 (2001-) 男,湖北应城人,学历:本科在读,主要研究方向:车身工程与智能制造。
