基于深度学习的空预器转子红外补光图像积灰状态识别
2022-07-04 14:42刘君邓毅杨延西魏永贵薛燕辉史雯雯
发电技术 2022年3期
刘君,邓毅,杨延西*,魏永贵,薛燕辉,史雯雯
(1.东方电气集团东方锅炉股份有限公司,四川省 成都市 611731;2.西安理工大学自动化与信息工程学院,陕西省 西安市 710048)
0 引言
目前,大型电站锅炉广泛采用回转式空气预热器(简称“空预器”),通过上下端板的布置,具有烟气侧通道和空气侧通道,分别对流经的烟气和风进行吸热和放热[1-2]。空预器普遍存在堵塞问题[3-5],不但增大了烟气阻力和风机电耗,严重时还会限制锅炉出力,导致空预器传热效果减弱,从而使热风温度下降、排烟温度升高、锅炉效率降低。
造成空预器堵塞的主要原因有:1)排烟温度过高,运行中烟道气的酸露点升高,此时硫酸溶液会在空预器的低温部分冷凝,在加热元件上发生低温腐蚀并形成积灰;2)吹灰蒸汽疏水不充分,造成管道过热度过低,且未将积水全部排出,可能导致传热板潮湿粘灰;3)脱硝系统氨逃逸率大,逸出氨与烟气中的SO3和水蒸气生成硫酸氢氨凝结物,导致空预器结垢堵灰;4)入炉煤硫分和灰分含量高,燃烧后具有较高的积灰沾污倾向[6]。柴一占等[7]采用锅炉内燃煤积灰的辐射特性来描述炉内热量传递,但当回转式空预器内部积灰至一定程度时,蒸汽吹灰器难以深度清灰,当通道完全堵塞时,在线处理难度大。为了减少积灰和腐蚀的危害,目前空预器普遍采用吹灰器进行吹扫。邢军等[8]尝试使用新型移动声波吹灰器进行吹灰,与传统蒸汽吹灰相比,吹灰效果明显改善,省煤器运行参数得到优化。张良等[9]采用在折焰角斜坡增加固定旋转式吹灰器的技术方案进行锅炉水平烟道除灰,有效解决锅炉折焰角及水平烟道区域积灰问题,消除安全隐患,确保锅炉安全经济运行。
但由于缺乏有效的检测和观察手段,吹损问题普遍存在,造成以下危害:吹损会导致传热面积减少,从而使传热效果减弱、锅炉效率降低;吹损搪瓷表面,会增加腐蚀的风险;吹损会导致回转式空预器传热元件松散,掉落的散件可能会卡住空预器;吹损会增加携带漏风。为尽可能地避免产生积灰堵塞,可对空预器热态运行中转子受热面的积灰程度、积灰分布进行在线监测,根据监测结果合理安排计划,优化吹灰与冲洗操作,从而提高机组运行的经济性和安全性[10]。
针对电站锅炉空预器受热面的积灰程度和优化吹灰的研究,传统方法包括热平衡法[11-13]、数学模型法[14-17]等。随着计算机和控制技术的发展,各种软件系统、人工智能、在线监测等技术已逐步应用于吹灰优化。杨祥良等[18]提出了一种基于人工神经网络的积灰实时监测方法,以预测锅炉对流受热面的积灰情况。赵勇纲等[19]将支持向量机与遗传算法相结合,建立一种预测低温过热器受热面清洁换热量的模型,与实际情况较吻合,可为实现大型电站锅炉积灰在线监测提供有力证据。周俊波等[20]对比分析了多种对流受热面的灰污程度智能监测技术,包括采用洁净因子的对流及半对流、半辐射受热面灰污监测技术,以及回转式空预器受热面灰污监测技术等。
针对积灰堵塞现象,虽然已有多种吹灰优化方法,但是目前的解决方案,尤其是测量传感部分局限于数值显示或定性评判,操作人员难以直观判断具体状态。鉴于此,要从根本上解决上述问题,应将先进的机器视觉技术应用到空预器积灰程度及分布监测中。本文采用深度学习智能算法进行积灰演化分析,采集空预器转子红外补光图像并进行预处理后建立特征工程,有效提取图像纹理特征,最后引入深度学习模型实现积灰状态识别。
1 空预器转子红外图像预处理
1.1 红外补光成像原理
红外摄像机成像依靠的是光敏图像传感器,通过它可将外界的光信号转化为电信号。针对因环境中照度不够而出现图像虚焦、昏暗、噪点等现象,最简单有效的方法就是对摄像机监控环境进行人为补光,而补光常采用红外光。红外光的波长在0.76~1 000μm,是介于微波与可见光之间的电磁波,是比红光还要长的非可见光[21],如图1所示。红外补光成像原理如下:红外补光灯发射某固定波段人眼不可感知的红外光,去照射周围景物,红外图像传感器接收周围景物反射回来的红外光,产生视频信号,并将信号通过数据线传输到摄像机的主控制电路,经处理后,将视频信号输出到显示设备上。

图1 电磁波谱图Fig.1 Electromagnetic spectrum
1.2 转子红外补光图像预处理
采用安装在空预器上的红外摄像机获取空预器转子的红外补光图像,采用红外补光技术最终得到可见的图像,实现非接触式检测以及全封闭、零照度环境下监控。但因拍摄过程中会存在环境、设备、人为等其他不可避免的因素干扰,所采集的图像往往存在噪声污染。红外补光图像噪声的幅值常近似于服从均值为零的正态分布,噪声对图像的影响是随机的,且任何时刻像素点的噪声幅值不相关,具有统计独立性。因此,需要进行适当的图像预处理以减少噪声干扰,同时提高图像质量。
高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器,且对于抑制服从正态分布的噪声非常有效。工程实践表明,高斯滤波是最有用的滤波操作,高斯函数确定的核可在抗噪声干扰和图像边缘检测精度定位之间提供较好的折中方案。因此本文选用二维零均值离散高斯函数作为平滑滤波器,表示如下:

式中:x、y为像素的模板坐标;σ为高斯分布参数,其决定了高斯函数的宽度,该参数值越大,则高斯滤波器的频带越宽,平滑效果越好,通过调节σ可在图像过平滑与欠平滑之间折中。
2 基于深度信念网络的转子红外补光图像积灰状态识别
2.1 图像边缘提取与增强
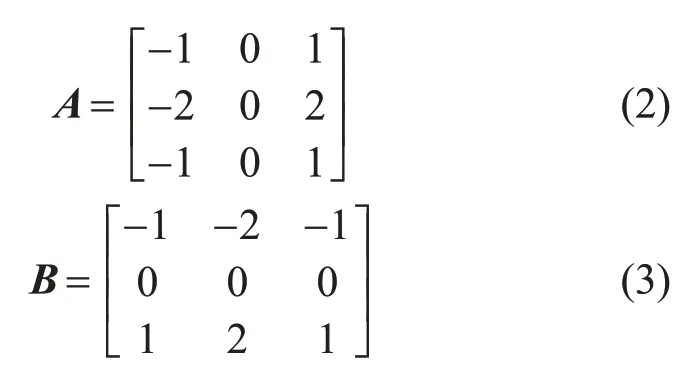
图像边缘指图像局部区域亮度变化显著的部分,该区域的灰度剖面可视为一个阶跃,即图像灰度矩阵的强度值存在显著变化。边缘部分集中了图像的大部分信息,在实际处理中,都是通过将原始图像与检测算子进行卷积来完成边缘提取。考虑到Sobel算子对灰度渐变和含噪图像具有更好的处理效果,且对边缘定位也比较准确,故本文选择Sobel算子对预处理后的空预器转子图像进行边缘检测。
Sobel算子x方向和y方向的梯度模板分别表示如下:
Sobel算子x方向和y方向的差分形式分别表示如下:
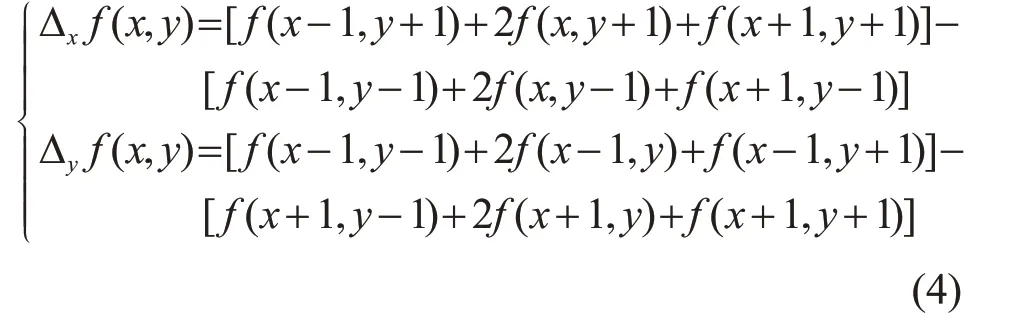
式中f(x,y)为输入图像。
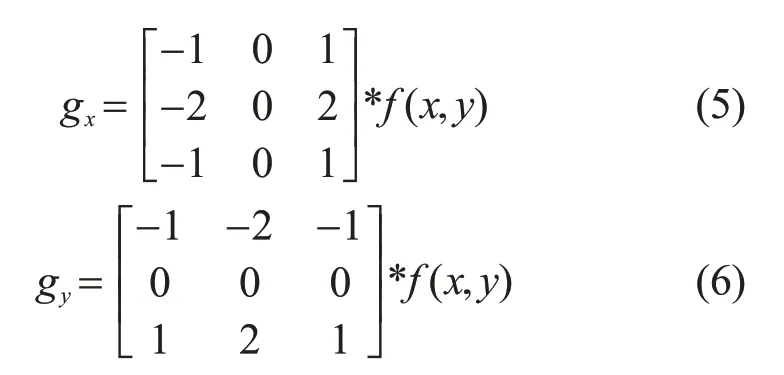
利用Sobel两个方向上的算子在输入图像上滑动,算子与其覆盖的9个像素进行卷积操作,即可分别得到水平及垂直方向边缘检测的幅值:
最终该点的幅值表示为

由于图像边缘增强的过程中,不仅提高了边缘检测灵敏度,同时还提高了噪声灵敏度,故再次采用高斯滤波进行图像增强,即基于高斯核函数对图像灰度矩阵的像素点进行加权求和,进一步有效滤除噪声。
2.2 图像纹理特征提取
图像灰度的空间相关特性可以描述图像的纹理,而灰度共生矩阵(gray level co-occurrence matrix,GLCM)包含图像灰度关于方向、相邻间隔、变化幅度等信息,实现了纹理数字化。
灰度共生矩阵采用条件概率来反映纹理,计算图像中一定距离和方向的两点灰度之间的相关性,得到图像中2个像素灰度级的联合分布的统计形式,并用联合概率密度函数表示。
选取图像f(x,y)中的任意一点(x,y)以及相隔距离为d的另一点(x+a,y+b),假设该点对的灰度值为(g1,g2),令(x,y)在整个图像平面上移动,便会得到不同的点对灰度值,统计某种点对灰度值(g'1,g'2)出现的次数,并用不同点对灰度值出现的总次数进行归一化处理,得到各点对出现的概率P(g'1,g'2),将其排成方阵,即为灰度共生矩阵G。
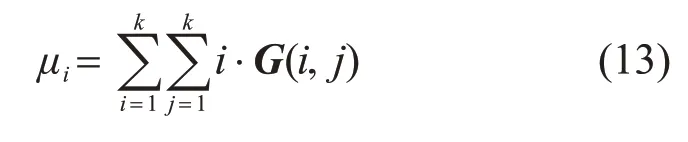
共生矩阵常用的特征包含角二阶矩(angular second moment,ASM)能量JASM、对比度、熵、逆方差(inverse difference moment,IDM)、自相关。其中,ASM能量表示为矩阵元素的平方和,反映了图像的灰度分布均匀程度以及纹理的粗细程度,其值越大,表明元素分布越集中;反之,表明元素分布越均匀。ASM能量可表示为

式中:k表示方阵G的行(列)数;i、j分别表示方阵G的行、列序号。
对比度直接反映了某个像素值及其邻域像素值亮度的对比情况,其值越大,表明纹理沟纹越深,视觉效果越清晰。对比度可表示为

而纹理信息是图像的一个随机性的度量,熵值越大,表明纹理越复杂。熵可表示为

逆方差也称为反差分矩阵,可反映图像纹理的同质性,其值越大,说明纹理的不同区域缺少变化,局部非常均匀。逆方差可表示为

自相关反映了图像纹理的一致性,当矩阵元素值均匀相等时,则相关值大;当元素值相差很大时,则相关值小。自相关可表示为

式中μi、μj、s i和s j分别表示如下:
2.3 基于深度信念网络的转子积灰状态识别
深度信念网络(deep belief network,DBN)是加拿大多伦多大学教授Geoffrey Hinton于2006年提出的。在结构上,DBN由多个受限玻尔兹曼机(restricted Boltzmann machines,RBM)堆叠而成,采用逐层训练的方式,解决了深层神经网络的优化问题。RBM由可见层和隐含层组成,层之间对称双向连接,层内单元之间无连接。其中,可见层为底层,用于表示观测数据;隐含层为上层,用于提取输入数据的抽象特征。所有单元的状态为二值变量,即只能取值0或1。采用对比散度算法对RBM不断进行学习以获取参数,包括可见层、隐含层的偏置以及层之间的权值3类实值。
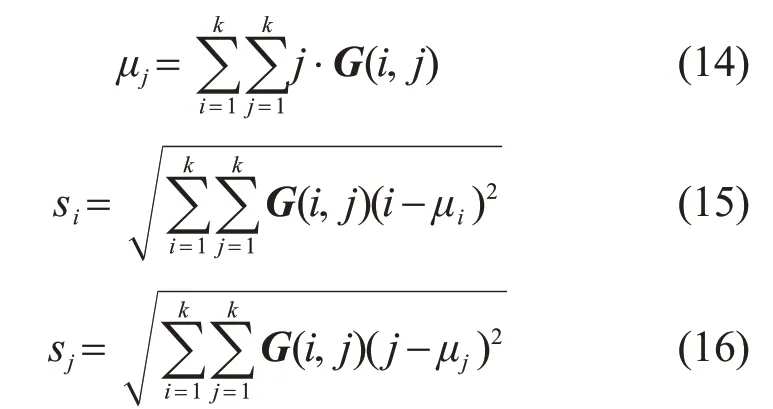
针对空预器转子积灰状态识别问题,建立了5输入4输出的DBN模型,由3层RBM和1层BP组成。模型的输入为ASM能量、对比度、熵、逆方差、自相关这5种纹理特征参数归一化之后的数值;输出为空预器转子的状态,包括完全通畅、轻微堵塞、严重堵塞、完全堵塞4种。
DBN模型如图2所示,实现流程如图3所示。具体实现步骤如下:
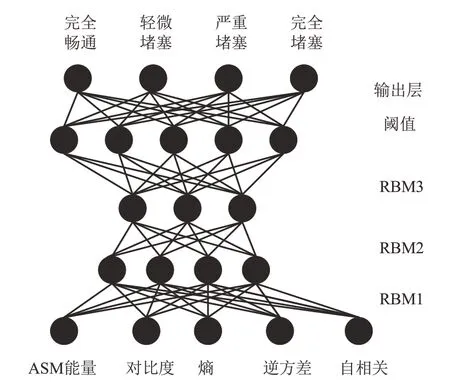
图2 DBN模型Fig.2 Model of DBN
图3 DBN模型分析流程图Fig.3 Analysis flow chart of DBN
1)选取这5种相关纹理特征数据,对样本数据进行归一化处理后,按照一定的比例分为预训练集、调优集、测试集。
2)对空预器转子的堵塞类型进行状态划分,即根据专家知识来识别不同样本的堵塞程度。
3)建立DBN分析模型,以对空预器转子积灰状态进行分析,并进行参数初始化。
4)采用对比散度算法分别单独无监督地训练每一层RBM,学习相关特征,保留特征信息。
5)将最后一层RBM的输出向量作为BP网络层的输入,有监督地通过BP算法微调整个DBN网络,使其性能达到全局最优。
6)利用测试集样本对网络进行测试,实现空预器转子积灰状态分析。
3 实验验证
2020年10月,在西宁某电厂600 MW燃煤发电机组A侧空预器上安装了可视化监控系统,总工期15天左右,并进行相应的实验测试,对空预器受热面不同程度的灰污状态进行识别。本文所搭建的深度神经网络模型基于TensorFlow框架,利用python语言完成。本次实验在Intel Core i5-7300 HQ CPU,运行内存为8 GB,显卡为2 GB的GPU平台上进行,实验中batchsize的大小设置为10,最大迭代步数为3 000。训练完成之后,选取360张测试样本图像,其中包括260张灰尘图像以及100张清洁图像,输入到训练好的DBN空预器转子红外补光图像故障分类模型中进行分析,识别结果如图4—6所示。

图4 不同积灰状态图像的纹理特征对比Fig.4 Comparison of texture features of images in different ash states
图4对比了灰尘、清洁图像所提取的5种纹理特征,可以看出,5种纹理特征均能有效地区分出不同积灰状态,为进行后续识别提供可靠的理论依据。

图6 不同积灰状态下的转子受热面图像(工况2)Fig.6 Images of rotor heating surface under different ash accumulation states(working condition 2)
对不同积灰程度工况下的空预器转子红外补光监控图像进行处理,结果分别如图5、6所示。可以看出,在工况1下,灰尘识别图像中检测到21个轮廓,轮廓总面积为61 412.5像素;清洁识别图像中检测到27个轮廓,轮廓总面积为328 859.0像素。在工况2下,灰尘识别图像中检测到575个轮廓,轮廓总面积为23 604.5像素;清洁识别图像中检测到595个轮廓,轮廓总面积为127 912.0像素。
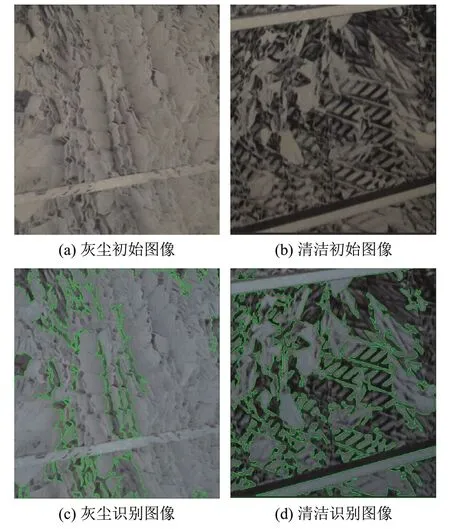
图5 不同积灰状态下的转子受热面图像(工况1)Fig.5 Images of rotor heating surface under different ash accumulation states(working condition 1)
以图像中所检测到的轮廓数量和轮廓总面积为参考指标,这2个指标数值越小,表明转子受热面的积灰程度越高,堵塞越严重;反之,表明转子受热面的积灰程度越轻。轮廓数量和轮廓总面积的具体阈值大小视操作人员专业知识而定。以上实验结果表明,在不同工况下,采用本文方法均能实现空预器转子受热面灰污状态和清洁状态的有效识别。
进一步对更复杂的工况进行实验,识别结果如图7所示,可以看出,采用本文方法能实现4种转子受热面的积灰状态识别,验证了方法的有效性和实用性。现场工作人员可直观地实时监测空预器受热面的灰污严重程度,并以所检测的轮廓数量及其总面积作为参考指标,综合考虑是否需要进行吹灰操作。
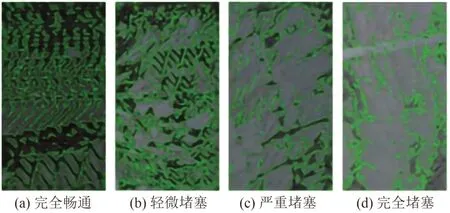
图7 识别分类结果示例Fig.7 Examples of identifying classification results
根据以上识别结果可以发现,本文所建立的基于DBN的空预器转子红外补光图像积灰状态识别模型具有很高的分类识别准确率,大大提高了检测率,节省了检测时间。在后期实践应用中,随着样本数据的积累,网络的识别分类能力有望进一步增强。
4 结论
1)基于DBN进行积灰演化分析,以图像中所检测的轮廓数量和轮廓总面积为参考指标,可以定量表示受热面灰污程度。相较于清洁状态下的转子图像,灰污状态下能检测出的轮廓数量和轮廓总面积明显偏少,且灰污程度越高,对应的指标数值越小,表明转子堵塞越严重,需要进行吹灰清洗等操作。
2)引入先进的机器视觉技术,有助于操作人员更加直观地监测锅炉内空预器转子运行状况,具有非接触式检测、全封闭、零照度下昼夜监控的优势,同时可定量地判断实际积灰堵塞状态,优化排产吹灰等操作,有一定经济性和安全性价值。另外,对其他实物也可以利用该方法进行类似检测,具有一定的通用性。
下一步,将对检测出的空预器转子积灰状态进行趋势预测,以实现更高程度的自动化检测,进一步提高检测效率。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
集装箱化(2021年1期)2021-04-12
计算机测量与控制(2021年2期)2021-03-04
中国信息技术教育(2020年2期)2020-02-02
时代英语·高一(2019年5期)2019-09-03
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
飞碟探索(2017年2期)2017-02-13
大灰狼(2009年7期)2009-08-26
现代电子技术(2009年6期)2009-05-31
舒适广告(2008年9期)2008-09-22