精细化短时交通流预测模型及迁移部署方案
2022-07-05 08:32郭嘉宸杨宇燊王研毛仕龙孙丽珺
计算机应用 2022年6期
郭嘉宸,杨宇燊,王研,毛仕龙,孙丽珺
精细化短时交通流预测模型及迁移部署方案
郭嘉宸,杨宇燊,王研,毛仕龙,孙丽珺*
(青岛科技大学 信息科学技术学院,山东青岛 266061)(通信作者电子邮箱lijunsun@qust.edu.cn)
精细化短时交通流预测是保证智能交通系统(ITS)合理决策的前提。为了建立无人驾驶汽车换道模型、预测车辆轨迹、引导车辆出行,及时为每条车道预测车流量成为亟须解决的问题,然而精细化短时交通流预测面临着以下挑战:一是交通流数据日益多元化,传统预测方法难以满足ITS高精度、短时延的要求;二是为每条车道训练预测模型会造成大量的资源浪费。针对以上问题,提出利用卷积-门控循环单元(Conv-GRU)结合灰色关联度分析法(GRA)建立精细化短时交通流预测模型预测车道流量。考虑到深度学习训练时间长、推理时间相对较短的特点,提出云-雾部署方案;同时,为避免为每条车道训练预测模型,在云-雾部署方案的基础上提出了模型迁移部署方案,该方案仅需训练部分车道的预测模型,然后通过GRA将训练好的预测模型迁移部署到关联车道进行预测。对真实交通流数据集进行大量对比实验的结果表明:与传统深度学习预测方法相比,所提模型拥有更精准的预测性能,与卷积-长短期记忆(Conv-LSTM)网络相比在提高精度的基础上运行时间更短,且能在保证高精度预测的情况下实现模型迁移,比训练每条车道的预测模型节省了约49%的训练时间。
精细化短时交通流预测;卷积-门控循环单元;灰色关联度分析法;时空特征;部署方案
0 引言
随着人均机动车保有量以及城市化率的逐步提高,交通拥堵、事故频发、尾气排放等问题导致城市交通管理面临严峻挑战。智能交通系统(Intelligent Transportation System,ITS)[1]通过数字化、智能化的方式改善交通管理,它的可靠性在很大程度上依赖于对短时交通流的准确预测[2]。
短时交通流预测是指通过历史交通数据预测相关路段或路口5~15 min后的交通状况。随着路网规模的扩大,传统的基于时间序列[3-4]与基于统计概率的预测方法在精准度、计算时延等方面已难以满足需求。而且随着传感器的升级,交通数据逐渐多元化,包含速度、道路情况、交通路程时间等多个属性,仅依靠浅层机器学习无法有效解决。深度学习[5]可以通过挖掘数据间复杂的非线性时空关系精准预测流量,因此受到了越来越多的关注。
目前的短时交通流预测研究大多预测路口整体流量,忽视了精细化预测各个车道的流量。精细化车道流量预测一方面可为无人驾驶汽车提供必要的车道路况信息,帮助车辆制定换道策略[6];另一方面在预测车辆轨迹时,需要考虑车辆与周围道路、车辆的交互,这包含了被预测车辆与周围车辆所在车道信息[7]。仅凭预测路口整体流量无法做到这两点。如图1所示,路口总流量与车道流量分布并不总是相似,例如北路口和北左车道的流量分布相似,但与其他两条车道相似性较弱。这是因为各车道有着不同的功能,每条车道上的车流量有属于自己的特征,不能简单地通过路口流量推算出各车道流量,因此本文采用深度学习对车道流量进行精细化短时预测。
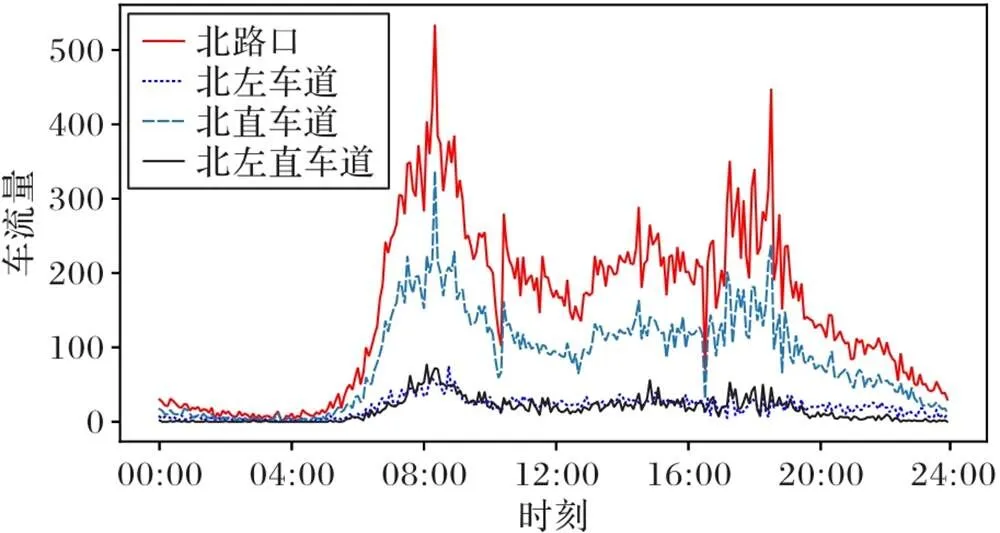
图1 路口流量和车道流量对比
针对深度学习模型部署问题,传统做法是将所有数据从采集设备发送到云数据中心进行分析处理[8],然而,数据移动将产生高带宽费用和高时延,同时也面临着隐私泄露的风险;但是如果在雾节点上训练模型,可能会由于计算资源有限而无法按时完成任务。因此本文考虑使用云-雾的方案对本文模型进行部署,以期解决雾节点资源紧张、云数据中心计算耗时且昂贵的问题;而且在此基础上进行模型迁移,将训练好的一条车道流量预测模型迁移至关联度高的其他车道,以有效减少计算开销。本文的主要工作如下:
1)提出一种精细化短时交通流预测模型对路口车道流量进行预测。首先利用灰色关联度分析法(Grey Relational Analysis, GRA)对车道进行关联度分析,其次利用卷积-门控循环单元(Convolutional-Gated Recurrent Unit, Conv-GRU)提取流量数据的时空特征。该操作能提高预测准确性,减少训练时间,实现时间间隔为5 min的车道流量预测。
2)提出云-雾迁移部署方案,考虑利用车道间的关联度,将训练好的流量预测模型迁移到与其关联度高的车道上,以减少计算开销。
3)利用真实数据集进行实验,结果表明本文模型具有可迁移性和高精准度,且迁移后的模型也保持了较高的精度。
1 相关工作
针对短时交通流量预测,大部分研究采用了基于时间序列和统计概率的预测方法。如Williams等[9]用自回归整合滑动平均(AutoregrRessive Integrated Moving Average, ARIMA)模型将交通流建模为自回归移动平均过程;但ARIMA主要用来处理线性关系,无法准确对交通流建模。Zhao等[10]利用高斯过程对交通流建模,并结合K最近邻(K-Nearest Neighbor, KNN)算法提出了四阶高斯过程动态模型(Gaussian Process Dynamical Model, GPDM)。
此外,许多学者以支持向量机(Support Vector Machine, SVM)[11]、自编码器(AutoEncoder, AE)[12]等浅层机器学习为基础在流量预测方面取得了一系列的研究成果。例如Feng等[13]将多项式核和高斯核复合成自适应多核支持向量机(Adaptive Multi-kernel Support Vector Machine, AMSVM),并利用粒子群优化算法优化参数,通过自适应调整核权重预测短时交通流量;Lv等[14]提出了一种基于堆栈自编码器的预测方法,然而该方法易陷入局部极小值,难以优化。
近年来,深度学习的迅速发展为交通流量预测提供了更多的选择[15-26]。利用长短期记忆(Long Short Term Memory, LSTM)网络善于处理时间序列数据的特点[16-18],Luo等[18]提出了一种KNN-LSTM方法,该方法使用KNN捕获空间特征,利用LSTM捕获流量的时间特征,结合时空特征对流量进行预测。卷积神经网络(Convolutional Neural Network, CNN),作为一种前馈式的神经网络也被广泛应用于流量预测[19-23]。杜圣东等[23]利用卷积-长短期记忆(Convolutional-Long Short-Term Memory, Conv-LSTM)网络、LSTM以及注意力机制提出了一种基于序列到序列的时空注意力学习的交通流预测模型。
综上所述,深度学习在交通流量预测中具有较大优势,但已有研究通常采用不同的模型、方法以并行的方式提取交通流量的时间特征、空间特征,然后将特征融合进行预测。这种并行融合的方式会导致交通流特征不能充分融合。虽然文献[23]中提到的Conv-LSTM可以融合空间和时间特征,但其中的LSTM相比门控循环单元(Gated Recurrent Unit, GRU)存在训练时间过长、收敛慢的缺点。
目前针对短时流量预测的研究大多把路口看作一个整体,对于路口精细化预测——分车道流量预测的研究目前仍是少数。因此本文提出利用GRA和Conv-GRU预测路口车道流量。该模型不仅可以融合提取流量数据的时空特征,并且其中的GRU模块相比LSTM有更短的训练时间和更高的收敛速度。
现有研究很少关注模型完成后的实际部署问题。Mu等[8]设计了一种智能交通网络物理云控制系统,该系统利用云计算实现交通流量预测;Yu等[15]提出了一种云-边缘-物联网三层架构,其中云数据中心负责数据处理,边缘负责模型训练与推理,物联网层负责信息采集;谷远利等[24]仅利用靠近车辆的5个边缘节点承担短时流量预测模型的训练与推理。但上述方法都没有考虑边缘服务器计算资源有限和数据传输的时延问题,因此本文提出云-雾迁移部署方案对模型进行部署。
2 精细化短时交通流预测模型
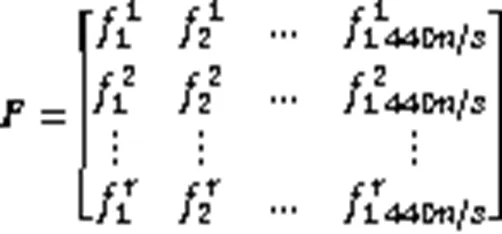
精细化短时交通流预测模型由数据预处理、车道关联度分析、预测模型设计三部分组成。本文使用的主要符号如表1所示。
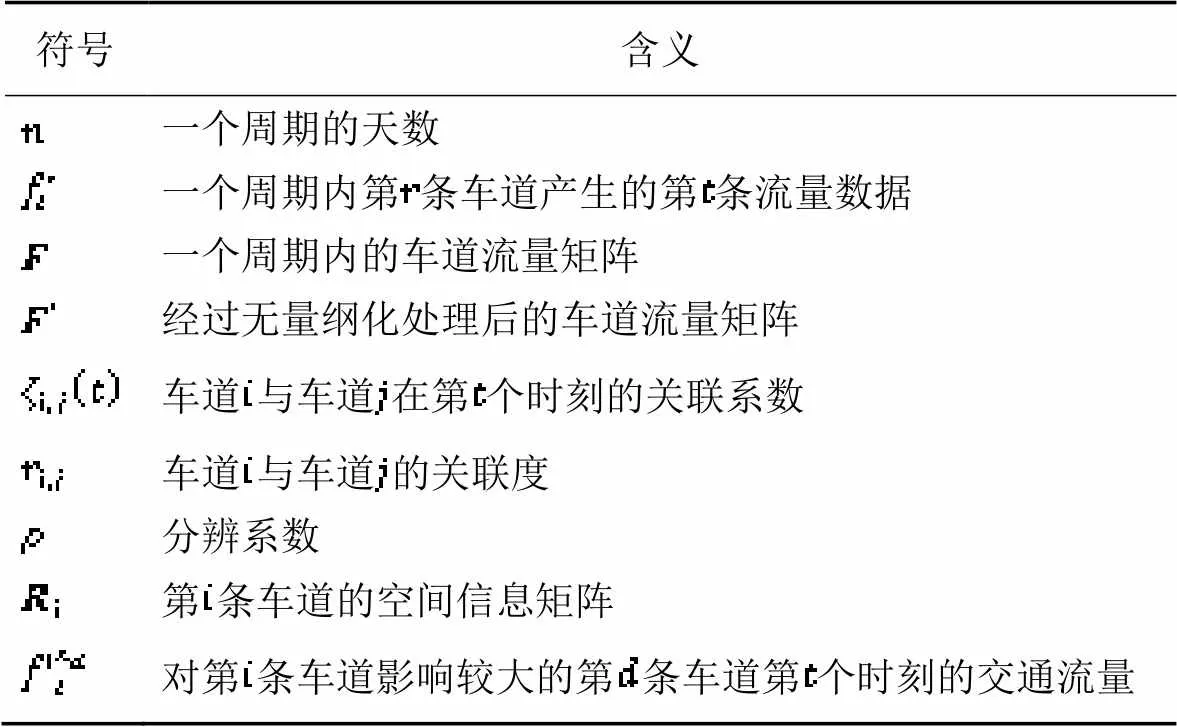
表1 主要符号说明
2.1 数据预处理

由于设备老化、长期环境等因素,数据会产生缺失、异常等现象,因此在建立模型前需要对数据进行预处理操作。


2.2 车道关联度分析
车道作为城市路网的重要组成部分,同一路口内的车道、相邻路口的车道间都存在着一定的关联度。本文引入GRA[27]分析车道的关联度。GRA根据各因素间发展态势的相似或者相异程度来衡量各个因素的关联程度,且对样本的数量和分布律没有要求,更适用于容易发生突变的交通流量数据。具体步骤如下:





2.3 预测模型设计
总体模型主要由输入层、卷积层、激活层、全连接层组成,如图3所示。
图2 部分车道的灰色关联度热图
Fig. 2 Grey relation heatmap of some lanes

图3 预测模型框架
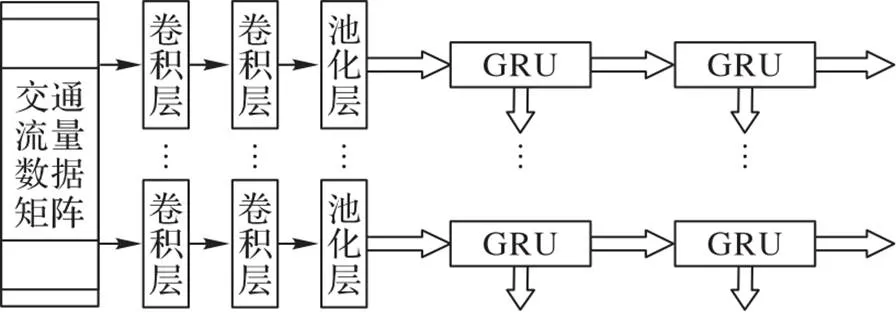
图4 Conv-GRU模块结构
Conv-GRU模块工作步骤如下:
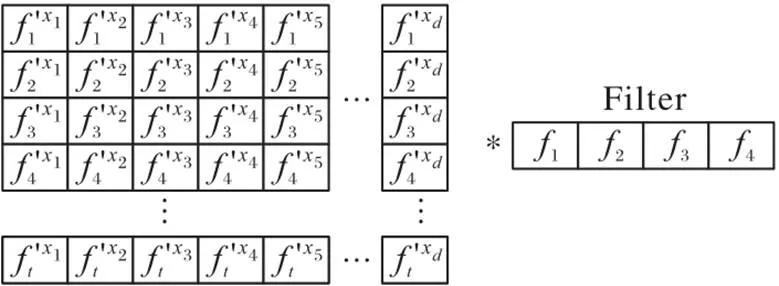
图5 一维卷积

同理,以数据矩阵第1行第2列为初始位置与滑动滤波器的卷积核相乘,得到:

以此类推,得到整个道路总的数据矩阵的卷积值如下:

步骤2 聚合所有的卷积值,形成交通流量数据空间特征。为了提高神经网络的表达能力,引入非线性激活函数,如式(10)所示。

步骤3 为降低数据的维度,采用平均池化技术滤除数据中不必要的信息和特征。




步骤4 将卷积和池化后的空间特征输入到GRU模块中,形成交通流量的时空特征。
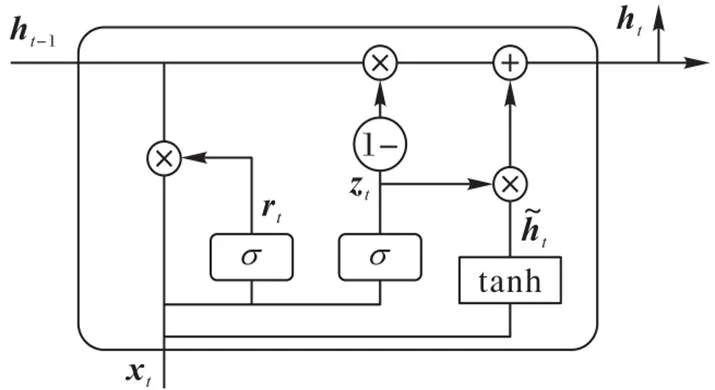
图7 GRU结构
GRU结构包括两个门控:更新门和重置门。具体步骤如下:




4)利用更新门计算当前时刻状态的输出。





3 云-雾迁移部署方案
云-雾迁移部署方案如图8所示。雾节点计算和存储数据能力有限,无法承担复杂的计算任务,仅可保存少量最新数据:而云数据中心有丰富的计算资源和强大的存储数据能力,雾节点需要将复杂的计算任务和大量历史数据上传到云数据中心。训练深度学习模型一般需要大量的历史数据和计算资源;相比模型训练,深度学习模型的推理仅需要少量最新数据,消耗少量计算资源。因此,本文将流量预测模型的训练放置到云数据中心,模型推理放置到雾节点;同时考虑到车道间具有不同程度的关联性,在云-雾部署方案的基础上提出了模型迁移部署方案,以减少资源消耗。
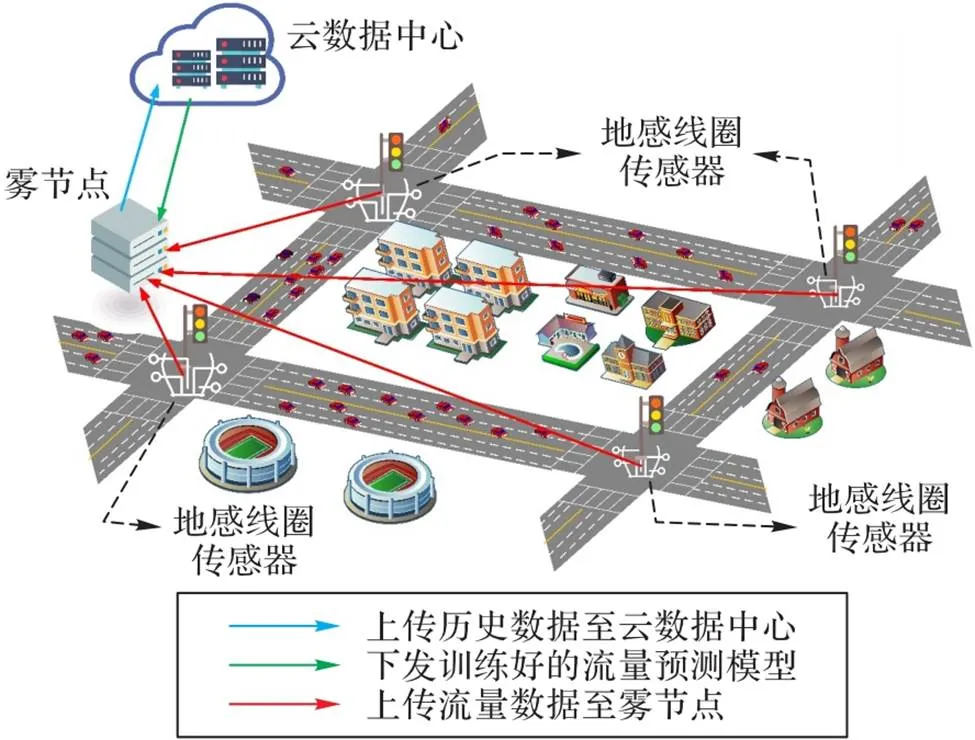
图8 云-雾迁移部署方案示意图

关联车道模型迁移算法描述如下:

4 实验设置及结果分析
4.1 数据来源和实验环境
实验使用的数据集是2019年6月1日到2019年12月31日山东省青岛市的交通流量数据。数据由十字路口的地磁传感器采集,包含9个路口及其所有车道流量数据,采用6—11月数据作为训练集,12月整月数据作为预测集。检测器每5 min提取一次流量数据。
实验硬件环境平台:中央处理器为Intel Core i5-8300H @ 2.30 GHz,运行内存为8 GB,机械硬盘内存为1 TB;软件环境平台包括Python3.6、Keras、Tensorflow等。
4.2 实验结果及分析
为验证本文模型的准确性,采用RMSE(计算公式见式(21))和MAE(计算公式见式(22))两个评价指标来评估预测结果。

将本文模型与Conv-LSTM、GRU、LSTM三个基准模型进行比较,结果如表2所示。从表2可以看出,无论是工作日还是休息日,本文模型的误差均小于对比的基准模型,模型精准度也更高。
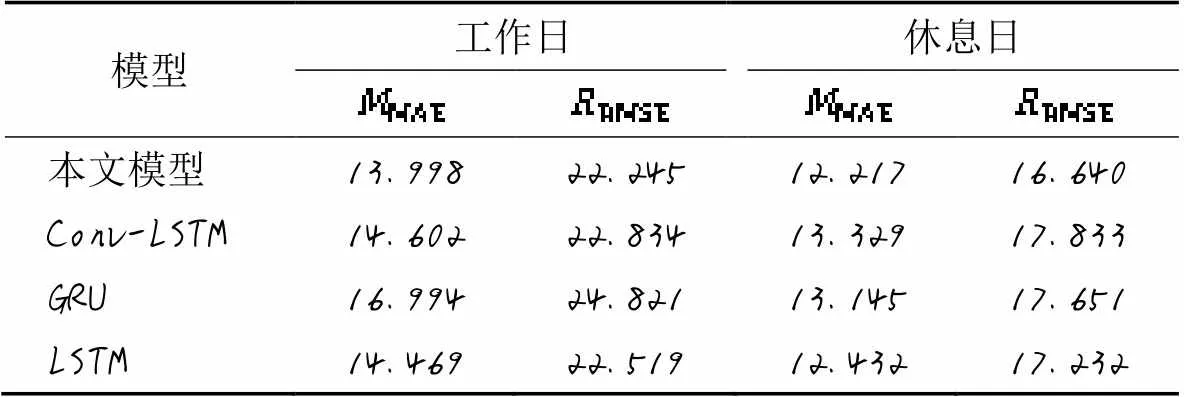
表2 不同方法在工作日和休息日的交通流量预测性能
为进一步比较预测方法的准确性,将本文模型与GRU、LSTM、CNN-LSTM三个基准模型分别对江西路—福州南路—南北直行的车道的2019-12-30(工作日)和2019-12-22(休息日)进行流量预测,结果如图9、10所示。图9、10是经过测试集实验后选择了迭代18到20次的结果,此迭代次数下模型预测效果好且预测时间短。
分析图9、10可知,无论预测工作日还是休息日的交通流量,本文模型的预测结果均比Conv-LSTM、GRU以及LSTM更加精确。这是因为本文模型是利用Conv-GRU将CNN和GRU集成为一个模块,融合提取流量数据的时空特征;Conv-LSTM虽然也是将特征进行融合,但碍于LSTM自身的性能,造成预测结果不如本文模型;而LSTM与GRU仅仅考虑了数据的单一特征,没有充分结合数据的时空特征。
结合表2以及图9、10的结果,虽然本文模型与Conv-LSTM方法的性能相差不大,但二者在每轮的迭代时间上有所差异,如表3所示。这是因为本文采用了Conv-GRU模型,其中的GRU模型与Conv-LSTM中的LSTM相比,少了一个门控循环单元,因此随着迭代步数的增加,运行时间明显减少。
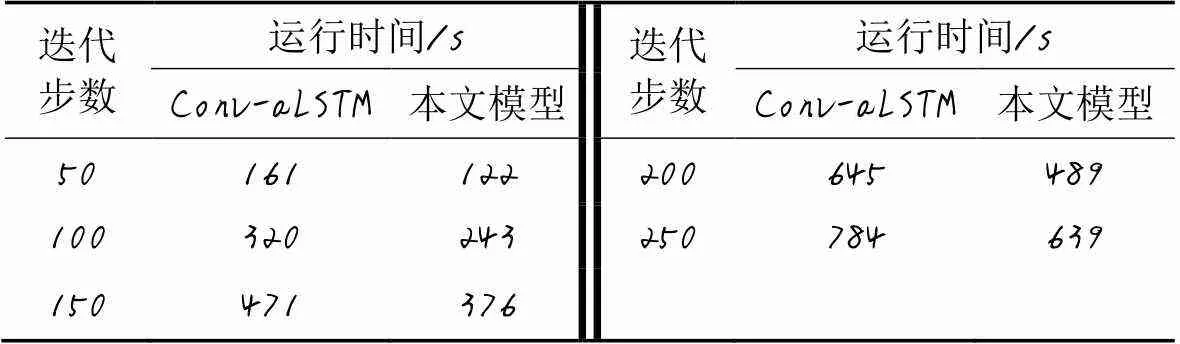
表3 不同迭代次数下模型运行时间
表4显示在同样的迭代次数下,在推理时间以及预测精准度上本文模型均优于Conv-LSTM;但由于数据量较少,结果的差异不明显,随着数据的增多,结果差异会进一步显现。

表4 模型推理时间及性能对比
此外,针对城市中路网复杂、车道数目庞大,无法对所有车道进行模型训练的问题,本文提出了模型迁移部署方案将训练好的车道流量模型迁移到关联度较高的车道,以减少训练模型的个数。
实验从车道间关联度最接近1的数值开始,用第3章的关联车道模型迁移算法寻找阈值。结果表明,车道关联度大于0.89时,预测效果良好,小于0.89时预测效果较差。图11给出了模型在迁移前后的性能对比:在模型迁移前,模型预测本车道车流量时具有良好的性能,而模型迁移后的预测性能则有不同表现。
图11(a)是0.89<关联度<1时,模型迁移后的预测结果,具有良好的精准度;而图11(b)是关联度<0.89的预测结果,可以明显看出存在一定的误差。且多次实验的最终结果表明:任何一条车道拥有的关联度大于0.89的关联车道最少为3条,最多为12条,因此,减少训练模型数目比例约为60%~70%,模型训练个数大幅减少。
以本实验为例,预计完成所有车道预测模型的训练需3 582 s,而经过迁移后,预计仅需1 752 s,节省约49%的时间。此外本文实验采用的数据集为9个路口中55条车道数据,而一个城市中车道数量约为上千条,随着车道数增多,节省的时间和计算资源也更多。实验最终结果表明,本文提出的模型迁移部署方案可减少需要训练的模型个数,缩短模型训练总时间,减少计算资源消耗,同时模型本身也保持着精准的预测性能。
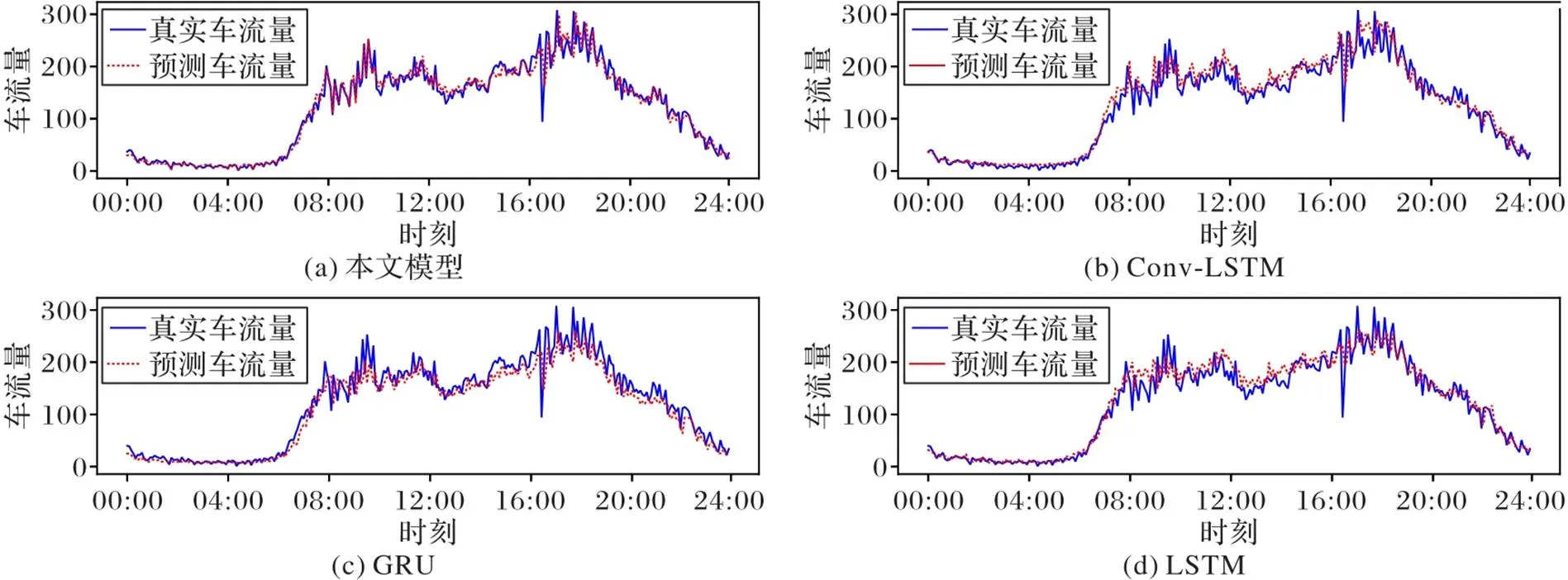
图9 工作日交通流量预测
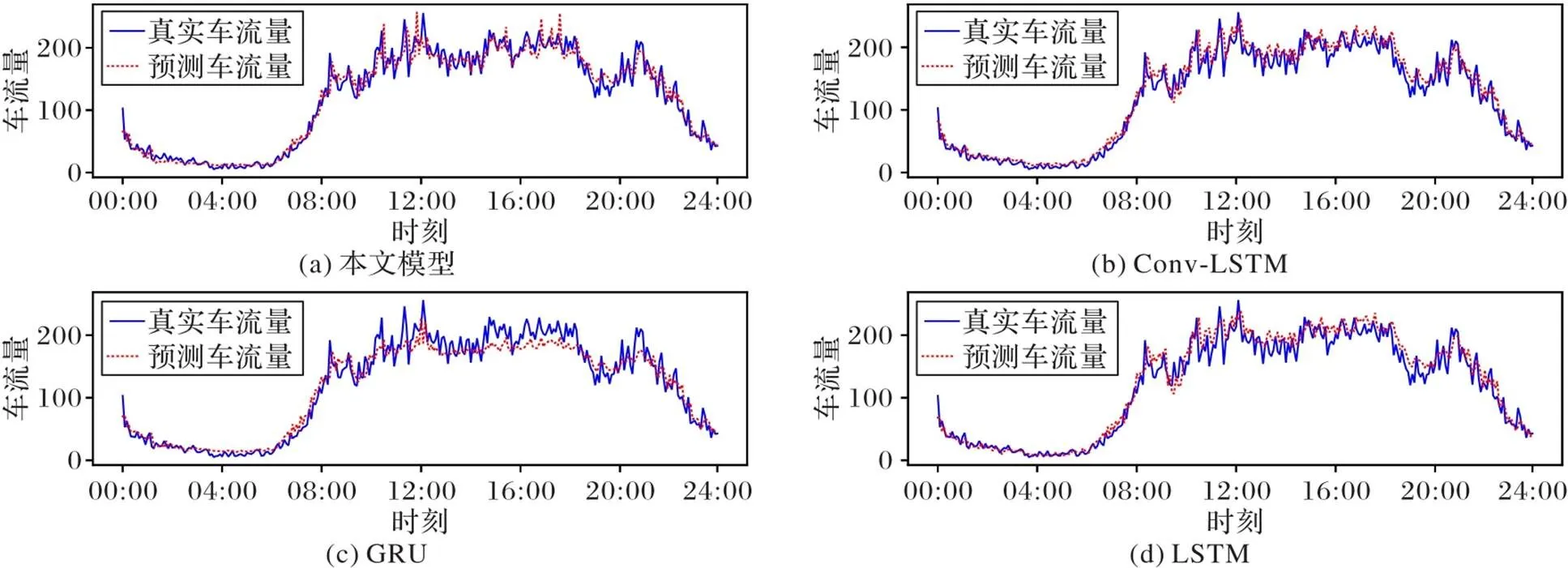
图10 休息日交通流量预测
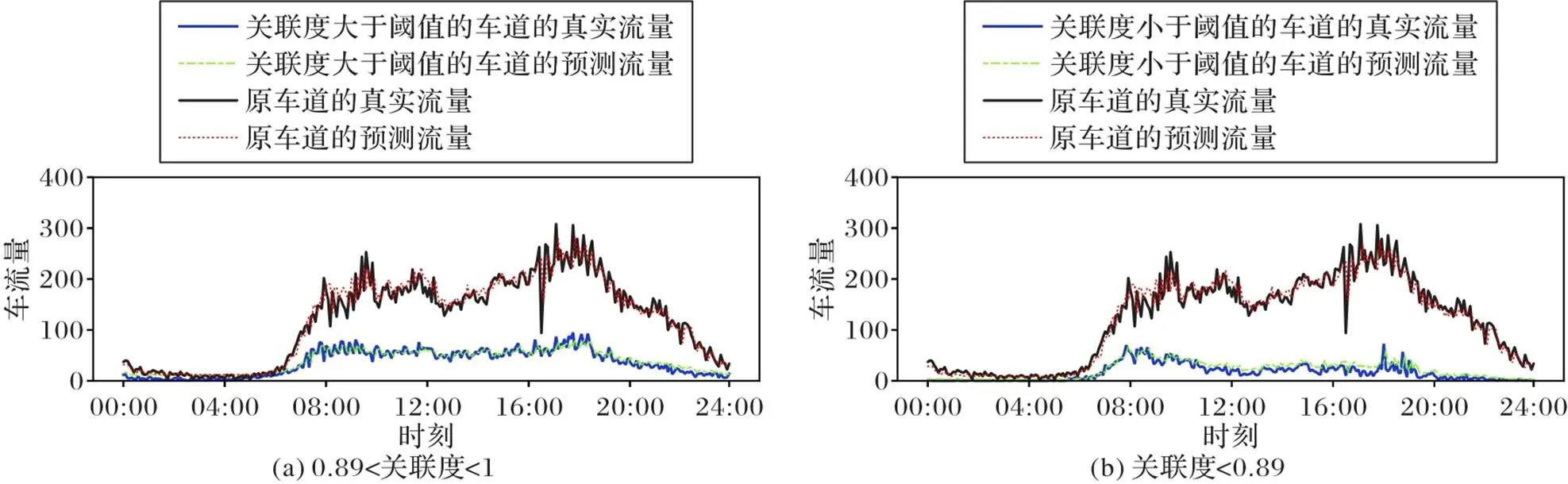
图11 模型迁移结果与关联度的关系
5 结语
本文提出的精细化短时流量预测模型利用Conv-GRU对车道流量进行预测,并利用GRA对车道进行关联度分析,能在保持精度的同时减少训练时间;在模型部署方面,引入雾计算提出了云-雾部署方案;同时针对城市中车道数量庞大、无法逐一训练模型的情况,提出模型迁移部署方案,将训练好的流量预测模型迁移到与其关联度高的其余车道上,减少计算开销;最后利用真实数据集进行实验,结果验证了模型的预测精准度和可迁移性。
未来工作将重点关注交通事故、天气情况等突发因素对交通流预测的影响;同时还将深入研究深度学习模型的分层部署问题以及如何利用车道流量数据预测车辆轨迹。
[1] NALLAPERUMA D, NAWARATNE R, BANDARAGODA T, et al. Online incremental machine learning platform for big data-driven smart traffic management[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(12): 4679-4690.
[2] VLAHOGIANNI E I, KARLAFTIS M G, GOLIAS J C. Short-term traffic forecasting: where we are and where we’re going[J]. Transportation Research Part C: Emerging Technologies, 2014, 43(Pt 1): 3-19.
[3] WEIGEND A S, GERSHENFELD N A. Time Series Prediction: Forecasting the Future and Understanding the Past[M]. New York: Routledge, 2018: 2-11.
[4] KUMAR S V, VANAJAKSHI L. Short-term traffic flow prediction using seasonal ARIMA model with limited input data[J]. European Transport Research Review, 2015, 7: No.21.
[5] KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks[C]// Proceedings of the 25th International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2012: 1097-1105.
[6] 薛春铭,谭国真,丁男,等. 基于博弈论的人类驾驶与无人驾驶协作换道模型[J]. 计算机工程, 2017, 43(12):261-266.(XUE C M, TAN G Z, DING N, et al. Cooperative lane-changing model of human driving and unmanned driving based on game theory[J]. Computer Engineering, 2017, 43(12): 261-266.)
[7] 包智鹏,支永帅,张素民,等. 基于BiGRU的多模态驾驶行为及轨迹预测[J]. 大连理工大学学报, 2021, 61(3):246-254.(BAO Z P, ZHI Y S, ZHANG S M, et al. BiGRU based multi-model maneuvers and trajectory prediction[J]. Journal of Dalian University of Technology, 2021, 61(3): 246-254.)
[8] MU S D, XIONG Z X, TIAN Y X. Intelligent traffic control system based on cloud computing and big data mining[J]. IEEE Transactions on Industrial Informatics, 2019, 15(12): 6583-6592.
[9] WILLIAMS B M, HOEL L A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: theoretical basis and empirical results[J]. Journal of Transportation Engineering, 2003, 129(6): 664-672.
[10] ZHAO J, SUN S L. High-order Gaussian process dynamical models for traffic flow prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2014-2019.
[11] VAPNIK V N. An overview of statistical learning theory[J]. IEEE Transactions on Neural Networks, 1999, 10(5): 988-999.
[12] BENGIO Y, COURVILLE A, VINCENT P. Representation learning: a review and new perspectives[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(8): 1798-1828.
[13] FENG X X, LING X Y, ZHENG H F, et al. Adaptive multi-kernel SVM with spatial-temporal correlation for short-term traffic flow prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2001-2013.
[14] LV Y S, DUAN Y J, KANG W W, et al. Traffic flow prediction with big data: a deep learning approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 865-873.
[15] YU X J, SUN L J, YAN Y, et al. A short-term traffic flow prediction method based on spatial-temporal correlation using edge computing[J]. Computers and Electrical Engineering, 2021, 93: No.107219.
[16] ZHENG J H, HUANG M F. Traffic flow forecast through time series analysis based on deep learning[J]. IEEE Access, 2020, 8: 82562-82570.
[17] SHAO H X, SOONG B H. Traffic flow prediction with Long Short-Term Memory Networks (LSTMs)[C]// Proceedings of the 2016 IEEE Region 10 Conference. Piscataway: IEEE, 2016: 2986-2989.
[18] LUO X L, LI D Y, YANG Y, et al. Spatiotemporal traffic flow prediction with KNN and LSTM[J]. Journal of Advanced Transportation, 2019, 2019: No.4145353.
[19] GUO S N, LIN Y F, LI S J, et al. Deep spatial-temporal 3D convolutional neural networks for traffic data forecasting[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(10): 3913-3926.
[20] KHAJEH HOSSEINI M, TALEBPOUR A. Traffic prediction using time-space diagram: a convolutional neural network approach[J]. Transportation Research Record, 2019, 2673(7): 425-435.
[21] 邓烜堃,万良,丁红卫,等. 基于深度学习的交通流量预测研究[J]. 计算机工程与应用, 2019, 55(2):228-235.(DENG X K, WANG L, DING H W, et al. Traffic flow prediction based on deep neural networks[J]. Computer Engineering and Applications, 2019, 55(2):228-235.)
[22] 徐凌伟,权天祺. 移动协作通信系统中断概率性能智能预测[J]. 聊城大学学报(自然科学版), 2020, 33(6): 33-39, 75.(XU L W, QUAN T Q. OP performance intelligent prediction of mobile cooperative communication system[J]. Journal of Liaocheng University (Natural Science Edition), 2020, 33(6): 33-39, 75.)
[23] 杜圣东,李天瑞,杨燕,等. 一种基于序列到序列时空注意力学习的交通流预测模型[J]. 计算机研究与发展, 2020, 57(8): 1715-1728.(DU S D, LI T R, YANG Y, et al. A sequence-to-sequence spatial-temporal attention learning model for urban traffic flow prediction[J]. Journal of Computer Research and Development, 2020, 57(8): 1715-1728.)
[24] 谷远利,陆文琦,李萌,等. 基于组合深度学习的快速路车道级速度预测研究[J]. 交通运输系统工程与信息, 2019, 19(4): 79-86.(GU Y L, LU W Q, LI M, et al. Lane-level traffic speed prediction for expressways based on a combined deep learning model[J]. Transportation Systems Engineering and Information, 2019, 19(4):79-86.)
[25] HUANG Y P, QIAN L P, FENG A Q, et al. Short-term traffic prediction by two-level data driven model in 5G-enabled edge computing networks[J]. IEEE Access, 2019, 7: 123981-123991.
[26] 张琛,徐国丽. 基于云遗传的RBF神经网络的交通流量预测[J]. 计算机工程与应用, 2014, 50(16): 216-220.(ZHANG C, XU G L. Prediction for traffic flow of RBF neural network based on cloud genetic algorithm[J]. Computer Engineering and Applications, 2014, 50(16): 216-220.)
[27] 刘思峰,郭天榜,党耀国,等. 灰色系统理论及其应用[M]. 2版. 北京:科学出版社, 1999:17-29.(LIU S F, GUO T B, DANG Y G, et al. Grey System Theory and Its Application[M]. 2nd ed. Beijing: Science Press, 1999: 17-29.)
Refined short-term traffic flow prediction model and migration deployment scheme
GUO Jiachen, YANG Yushen, WANG Yan, MAO Shilong, SUN Lijun*
(,,266061,)
Refined short-term traffic flow prediction is the premise to ensure the rational decision making in Intelligent Transportation System (ITS). In order to establish the lane-changing model of self-driving car, predict vehicle trajectories, and guide vehicle routes, the timely traffic flow prediction for each lane has become an urgent problem to solve. However, refined short-term traffic flow prediction faces the following challenges: first, with the increasing diversity of traffic flow data, the traditional prediction methods cannot meet the requirements of ITS for high precision and short time delay; second, training prediction model for each lane make a huge waste of resources. To solve the above problems, a refined short-term traffic flow prediction model combined Convolutional-Gated Recurrent Unit (Conv-GRU) with Grey Relational Analysis (GRA) was proposed to predict lane flow. Considering the characteristics of long training time and relatively short reasoning time of deep learning, a cloud-fog deployment scheme was designed. Meanwhile, to avoid training prediction models for each lane, a model migration deployment scheme was proposed, which only needs to train the prediction model of some lanes, and then the trained prediction models were migrated to the associated lane for prediction through GRA. Experimental results of extensive comparisons on a real-world dataset show that, compared with traditional deep learning prediction methods, the proposed model has more accurate prediction performance; compared with Convolutional-Long Short-Term Memory (Conv-LSTM) network, the model has shorter running time. Furthermore, the model migration is realized by the proposed model under the condition of ensuring high-precision prediction, which saves about 49% of training time compared to training prediction model for each lane.
refined short-term traffic flow prediction; Convolutional-Gated Recurrent Unit (Conv-GRU); Grey Relational Analysis (GRA); spatiotemporal feature; deployment scheme
This work is partially supported by 2020 College Student Innovation Training Program of Qingdao University of Science and Technology (S202010426017).
GUO Jiachen, born in 1997, M. S. candidate. His research interests include deep learning, intelligent transportation.
YANG Yushen, born in 2000. His research interests include deep learning, intelligent transportation.
WANG Yan, born in 2000. His research interests include deep learning, intelligent transportation.
MAO Shilong, born in 2000. His research interests include deep learning, intelligent transportation.
SUN Lijun, born in 1978, Ph. D., associate professor. Her research interests include fog/edge computing, intelligent transportation, crowdsourcing.
TP391
A
1001-9081(2022)06-1748-08
10.11772/j.issn.1001-9081.2021061411
2021⁃08⁃06;
2021⁃09⁃17;
2021⁃11⁃17。
青岛科技大学2020年大学生创新训练计划项目(S202010426017)。
郭嘉宸(1997-),男,山东烟台人,硕士研究生,CCF会员,主要研究方向:深度学习、智能交通;杨宇燊(2000-),男,福建三明人,主要研究方向:深度学习、智能交通;王研(2000-),男,山东临沂人,主要研究方向:深度学习、智能交通;毛仕龙(2000-),男,山东菏泽人,主要研究方向:深度学习、智能交通;孙丽珺(1978-),女,山东淄博人,副教授,博士,CCF会员,主要研究方向:雾/边缘计算、智能交通、众包。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中草药(2022年17期)2022-09-05
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科技资讯(2017年19期)2017-08-08
科技创新与应用(2017年16期)2017-06-10
东方教育(2016年6期)2017-01-16
珠江水运(2016年23期)2017-01-04
中国市场(2016年36期)2016-10-19
考试周刊(2016年62期)2016-08-15