INS辅助的GNSS欺骗干扰辨识与抑制方法
2022-07-06 08:22商向永孙付平张伦东王大明
中国惯性技术学报 2022年2期
商向永,孙付平,张伦东,王大明,柯 晔,3
(1. 中国人民解放军战略支援部队信息工程大学,郑州 450001;2. 光电对抗测试评估技术重点实验室,洛阳 471000;3. 31618部队,福州 350000)
欺骗式干扰通过发射虚假的卫星信号可以使得全球卫星导航系统(Global Navigation Satellite System,GNSS)接收机输出错误的位置和时间信息。近年来,多种实验表明欺骗干扰源可以引导依靠GNSS接收机导航的汽车、轮船和无人机到错误的位置[1,2]。为了对抗欺骗干扰,国内外学者提出了多种抗欺骗算法,包括基于单天线接收机信号处理的抗欺骗技术、基于信号来向的抗欺骗技术和基于其他设备辅助的抗欺骗技术等[3]。其中,大部分抗欺骗算法只能实现欺骗的检测,不能恢复正确的定位和授时信息,基于阵列天线的抗欺骗技术可以检测和抑制单一来向的欺骗信号,但较高的硬件成本限制了其大规模应用[4]。
惯性导航系统(Inertial Navigation System, INS)定位解算不受外界干扰影响,可以为GNSS欺骗干扰的检测和抑制提供辅助信息。已有的INS/GNSS组合导航的抗欺骗技术主要包括基于卡尔曼滤波器新息和新息速率的欺骗检测算法[5,6]、基于INS与GNSS原始测量值比对的欺骗检测算法[7]、INS辅助的GNSS载波相位[8]或自主完好性检测算法[9]等。随着欺骗技术的发展,欺骗干扰的起效过程更加隐蔽,牵引式欺骗干扰根据目标接收机的位置实时控制欺骗信号生成,欺骗轨迹相对目标接收机真实轨迹缓慢变化,避免由于位置或速度的突变而被抗欺骗算法识别[10]。已有的基于INS/GNSS组合的抗欺骗算法对上述类型的欺骗干扰检测性能会降低,即使检测到卫星导航受到欺骗,大部分抗欺骗算法不能抑制欺骗信号并利用真实卫星信号,不能提供长时间高精度连续导航。
牵引式欺骗与多径干扰存在相似之处,都会引起接收机自相关函数的畸变,进而导致GNSS定位结果出现偏差。为了检测和抑制牵引式欺骗干扰,可以将多径抑制算法(Multipath Estimation Delay Lock Loop,MEDLL)引入INS/GNSS组合导航系统中,对真实卫星信号和欺骗信号进行估计,抑制欺骗干扰的影响[11,12]。欺骗抑制与多径抑制存在两个差别:一是辨识算法不同,多径信号落后于真实卫星信号,因此辨识简单,延迟较大的信号分量即为多径,而欺骗干扰延迟可能超前也可能滞后于真实卫星信号,需要开发新的辨识方法;二是对接收机跟踪环路影响不同,多径信号弱于卫星信号,只会导致跟踪环路部分偏离真实卫星信号,而欺骗信号强于卫星信号,并且逐步调整相对延迟,最终可能使真实卫星信号相关峰与欺骗信号不再重叠,接收机跟踪环路只锁定欺骗信号,MEDLL将无法对真实卫星信号参数进行估计,因此需要根据欺骗信号辨识结果对接收机跟踪环路进行控制,保证接收机始终锁定真实卫星信号。
为了有效地检测和抑制牵引式欺骗,本文将MEDLL中的Multi-correlator结构与INS组合使用,在INS辅助下实现欺骗信号参数的估计、辨识和抑制,保证接收机跟踪环路始终锁定真实的卫星信号,在欺骗干扰下输出正确的定位和授时信息,提高组合导航系统在复杂环境下对抗欺骗干扰的能力。
1 基于Multi-correlator结构的欺骗信号参数估计
1.1 欺骗信号建模
在牵引式欺骗干扰的初始阶段,为了降低被抗欺骗算法检测的概率,欺骗干扰源发射与真实卫星信号功率、伪码相位和载波频率相近的欺骗干扰信号,避免接收机参数的突变。牵引式欺骗干扰的工作过程如图1所示,在t0到t1时刻,欺骗干扰源利用信号的功率优势接管接收机的跟踪环路,然后逐步增大欺骗信号的延时,直到t2时刻真实卫星信号和欺骗信号的自相关函数相关峰不重叠,接收机跟踪环路完全锁定欺骗信号,按照欺骗干扰源设定的轨迹输出错误的位置或时间信息。
在t0到t1时刻,由于真实卫星信号和欺骗信号的自相关函数相互重叠,接收机跟踪环路输出的自相关函数会发生畸变。利用Multi-correlator结构测量畸变的自相关函数,建立多相关器输出同卫星信号和欺骗信号特征参数的概率密度函数,然后利用极大似然准则实现欺骗信号参数的估计。
欺骗干扰条件下,接收机收到的信号可以表示为:

其中,P为接收信号中卫星信号分量和欺骗信号分量的总数;Di为导航电文;Ci为扩频码序列;Ai、τi、fi和φi分别为第i个信号分量的幅度、传输延迟、多普勒频率和载波相位;n(t)为噪声分量。
1.2 欺骗信号参数估计
接收信号r(t)与接收机本地生成的一系列扩频码序列C(t-δk)进行相关运算,假设稳定状态下载波跟踪环路中多普勒频率误差为零,则多相关器的输出可以表示为:
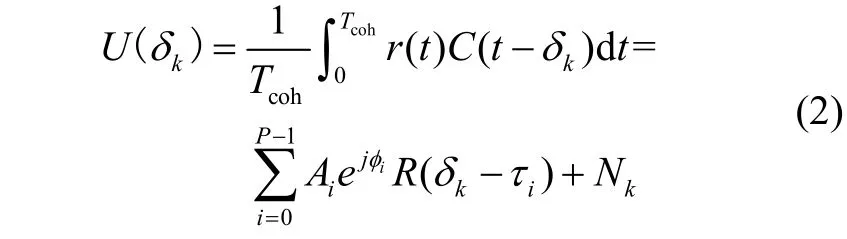
其中,δ k=+kΔ表示第k个相关器的延迟,表示当前时刻接收机扩频码跟踪环路的延迟,Δ=TC/M表示两个相邻相关器间的延迟间隔,TC为一个扩频码片的宽度,M表示一个码片内相关器的数量;R(δk)为扩频码序列的自相关函数。为了实现对自相关函数重叠条件下欺骗信号特征参数的估计,k的取值范围设为k=-2M…2M,即正负两个扩频码区间。
将式(2)中多相关器的输出表示成向量形式:



假设n(t)为高斯白噪声序列,多相关器输出U的概率密度函数可以表示为[13]:

其中,Q为噪声序列的等价协方差矩阵:

假设接收信号中只存在一个欺骗信号分量,即P=2,依据极大似然准则,利用网格搜索的方法遍历所有可能的延迟(τ0,τ1)(τ0≠τ1)组合,即可求解出卫星信号和欺骗信号的特征参数(τ0,A0,φ0)和(τ1,A1,φ1)[13]。
1.3 欺骗干扰检测
为了使得接收机跟踪环路锁定欺骗信号,欺骗干扰源发射信号的伪码牵引速率是受限的,单位时间内欺骗信号相对真实卫星信号伪码相位时延的变化是一个较小的统计量。1.2节极大似然估计的结果中,一个信号分量为真实卫星信号,另一个分量为欺骗信号、多径信号或者噪声,噪声和动态条件下多径信号的延迟变化是随机的,相对真实卫星信号延迟的变化是一个较大的统计值;对于延迟恒定的多径信号,其会引入固定的伪距测量误差,影响定位结果,因此也可以被归为“欺骗”进行抑制。使用文献[14]中提出的码相位差平均变化(Mean Change in Code Phase Difference, MCCPD)用于欺骗干扰的检测,定义如下:

其中,CPDi=τ0-τ1为极大似然估计结果中不同信号分量伪码相位延迟的差值,如果MCCPD小于门限MCCPDth,则判定欺骗干扰存在。
通过使用Multi-correlator结构对真实卫星信号和欺骗信号参数进行估计,结合MCCPD检测量,可以检测欺骗干扰的存在。下一步需要进行的工作是辨识出极大似然估计结果(τ0,A0,φ0)和(τ1,A1,φ1)中哪个分量是欺骗信号,然后进行欺骗信号的抵消,保证接收机跟踪环路锁定真实卫星信号。
2 INS辅助的欺骗信号辨识与抑制
2.1 基于组合导航的欺骗抑制方案
INS能够连续提供高采样率的位置基准信息,结合GNSS星历,可以预测真实卫星信号的伪距,辅助欺骗信号辨识。第一步,根据多相关器的输出,对接收信号中不同信号分量的幅度、伪码时延和载波相位特征参数进行估计;第二步,根据MCCPD检测欺骗干扰的存在;第三步,如果存在欺骗干扰,利用INS辅助信息预测真实信号的延迟,与极大似然估计的结果进行比较,将延迟偏差大的信号分量识别为欺骗,输出对应特征参数(τs,As,φs);第四步,根据欺骗识别的结果,将多相关器输出中欺骗信号分量抵消,使用剩余的真实卫星信号进行跟踪环路中伪码和载波鉴相,控制本地伪码和载波信号的生成,保证接收机始终锁定真实卫星信号。在欺骗信号参数估计和辨识的过程中,可能存在随机的粗差甚至错误辨识,为了抵制异常观测值的影响,在GNSS/INS组合的过程中,引入抗差卡尔曼滤波,保证输出定位和授时结果的稳定。INS辅助的欺骗信号辨识与抑制实现方案如图2所示。
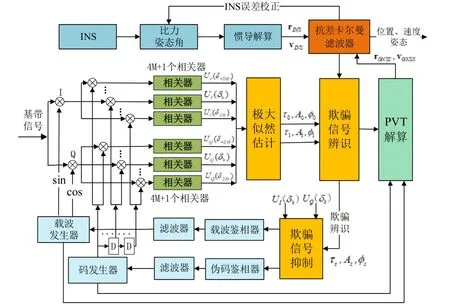
图2 INS辅助的欺骗信号辨识与抑制Fig.2 INS aided spoofing identification and suppression
2.2 GNSS/INS组合模型


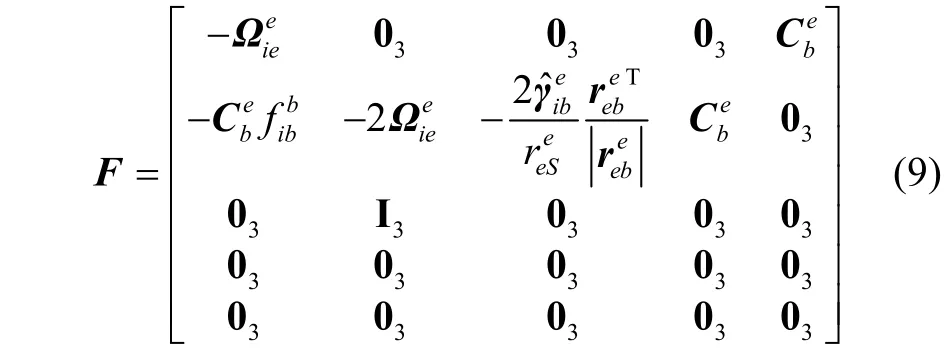
其中,W是噪声向量,G是噪声投影矩阵,F是系统状态转移矩阵:
系统观测方程为:
其中,r GNSS、vGNSS分别表示GNSS输出的位置和速度向量,rINS、vINS分别表示INS输出的位置和速度向量,E表示观测噪声向量。
在组合导航解算过程中,为了抵制由随机的欺骗信号参数估计粗差和错误辨识引入的异常GNSS观测值,引入抗差估计算法[15],使用观测值计算等价协方差矩阵,计算公式为:
其中,c0和c1为常数,取值范围为c0=1.0~1.5,c1=2.5~8.0,
等加权矩阵为:

观测值的协方差矩阵变为:

其中,Σk为原始的观测值协方差矩阵。
2.3 INS辅助的欺骗信号辨识
GNSS接收机的伪距观测值如式(15)所示:

其中,rl表示第l颗卫星与接收机的几何距离,δtu表示接收机钟差,δtl表示卫星钟差,I l、ζl分别表示电离层和对流层延迟误差,ε为伪距测量噪声。
假设接收机定位的初始阶段没有欺骗干扰,在接收机始终锁定真实卫星信号的条件下,接收机钟差δtu可以被校正,卫星钟差、电离层和对流层延迟可根据误差模型进行估计,在INS辅助下,可以预测真实卫星信号的伪距:
其中,xl、yl、zl表示当前历元卫星在地心地固坐标系中的位置,xINS、yINS、zINS和vxINS、vyINS、vzINS表示与当前历元最近一次INS解算的位置和速度,Δt表示当前历元与INS解算历元间的时间差。
极大似然估计结果中给出了两个信号分量的时延:τ0=+k0Δ和τ1=+k1Δ,假设当前历元接收机的伪距观测值为ρ,则两个信号分量对应的伪距分别为ρ+ck0Δ和ρ+ck1Δ,将其与INS预测的伪距相比较,偏差大的信号分量识别为欺骗干扰:

将识别的信号分量对应的延时、幅度和相位(τSp,ASp,φSp)输出至欺骗信号抑制模块,用于抵消欺骗干扰信号对接收机跟踪环路的影响。
2.4 欺骗信号抑制
根据式(2),多相关器的输出向量U(δk)为真实卫星信号和欺骗信号的线性累加,根据欺骗识别的结果,将欺骗信号分量抵消:

剩余的即为真实卫星信号分量U Au(δk),分别输入伪码鉴相器和载波鉴相器,经过滤波后控制接收机跟踪环路锁定卫星信号。
3 试验验证
为了验证所提欺骗辨识和抑制算法的效果,使用美国德克萨斯大学奥斯汀分校提供的TEXBAT (the Texas spoofing test battery) 欺骗数据集进行验证试验,分析不同条件下所提抗欺骗算法的效果。
3.1 INS数据仿真
TEXBAT欺骗数据集给出了静态和动态场景下对接收机时间欺骗和位置欺骗的GPS中频数据,同时还给出了无欺骗干扰条件下原始的中频数据文件cleanStatic.bin和cleanDynamic.bin。在INS数据仿真时,首先根据TEXBAT中无干扰条件下GPS中频数据生成真实的接收机运动轨迹,然后在此基础上仿真原始的INS陀螺仪和加速度计数据,最后在INS数据中加入误差项用于模拟不同精度的惯导。INS数据仿真过程中,分别模拟了两种不同精度等级的惯导,误差如表1所示。
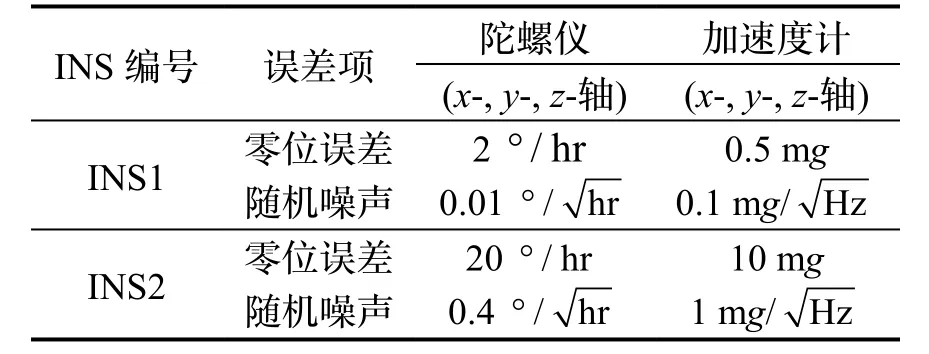
表1 两种不同精度INS误差Tab.1 errors of two different precision INS
3.2 欺骗信号检测和辨识
图3(a)(b)分别给出了对TEXBAT中静态时间欺骗场景ds2和动态位置欺骗场景ds6进行欺骗检测的结果,实验中GNSS接收机的相干积分时间设为5 ms,一个码片内相关器的数量设为20个,即M= 20。对于ds2,所有卫星的欺骗检测量MCCPD在欺骗开始后1 s内均降到检测门限以下。对于ds6,部分卫星的欺骗检测量在欺骗开始后1 s内降到检测门限以下;部分卫星欺骗检测量在第140 s左右降到检测门限以下,此时欺骗引起的位置偏差约为10 m(后续图7所示)。试验结果表明,欺骗检测量MCCPD能够在较小的位置或时间偏差条件下给出指示信息,INS辅助的欺骗信号辨识和抑制算法开始起效。
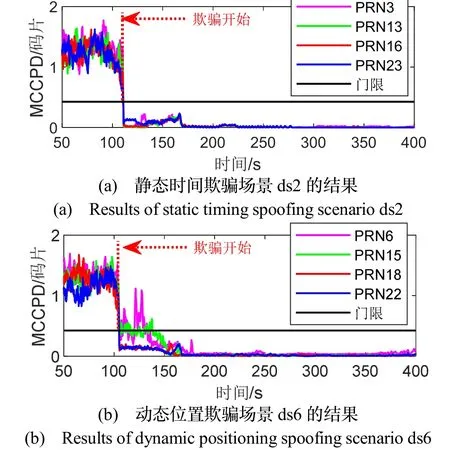
图3 不同场景的欺骗检测结果Fig.3 Spoofing detection results of different scenarios
图4给出了对TEXBAT中动态位置欺骗场景ds6的PRN15号卫星,INS辅助的GNSS真实信号和欺骗信号复数幅度估计和辨识的结果。从图中可以看出,接收机载波跟踪环路锁定了真实信号,真实信号的能量集中在载波跟踪环路同相支路上;对于欺骗信号,由于与真实信号存在载波相位偏差,信号能量在载波跟踪环路的同相支路和正交支路上都存在分量。
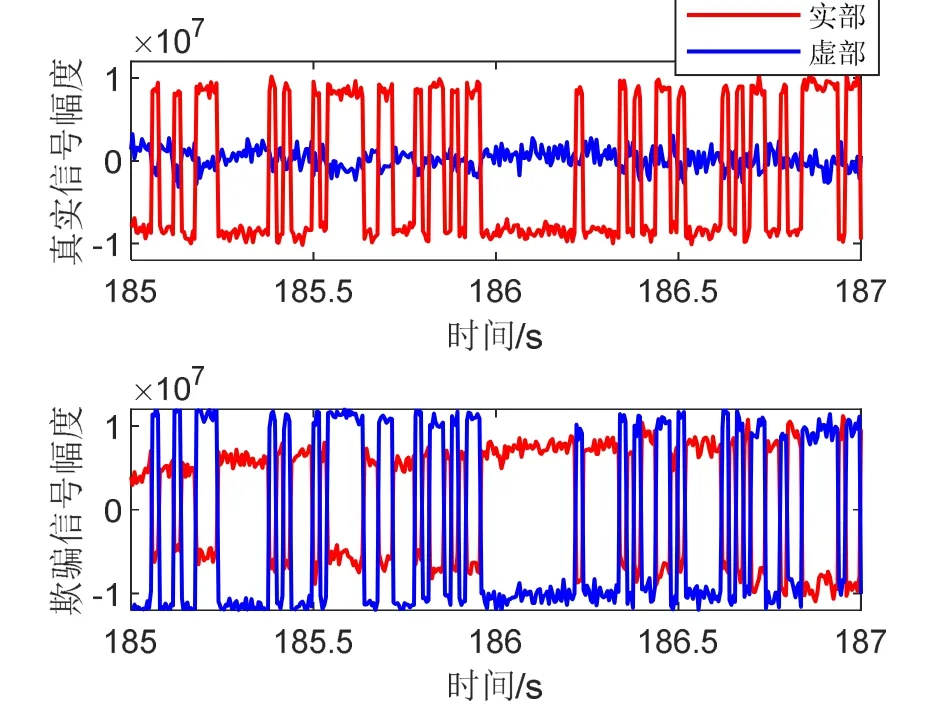
图4 真实信号和欺骗信号复数幅度估计结果Fig.4 Complex amplitude estimation results of authentic and spoofing signals
图5给出了对欺骗场景ds6的PRN15号卫星真实信号和欺骗信号绝对幅度估计和辨识的结果。由于欺骗信号的能量优势仅为0.8 dB[16],在信号参数估计过程中会存在误差,极大似然估计结果中真实卫星信号的绝对幅度可能会大于欺骗信号,因此基于幅度比较的欺骗信号辨识算法不可靠,本研究中引入了INS辅助的欺骗信号辨识算法。
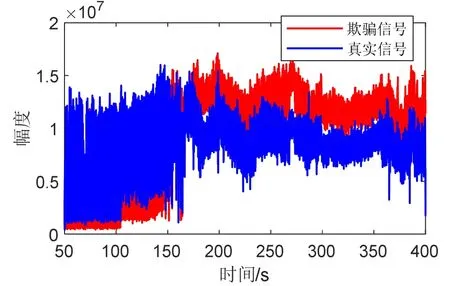
图5 真实信号和欺骗信号绝对幅度估计结果Fig.5 Absolute amplitude estimation results of authentic and spoofing signals
3.3 欺骗信号抑制
图6给出了连续定位条件下,对TEXBAT中静态时间欺骗场景ds2的欺骗抑制结果。由于GNSS持续对INS的误差进行校正,因此不同精度的INS辅助的欺骗信号抑制结果基本一致。在第140-170 s,欺骗抑制结果的误差较大,原因是在这一段时间内,真实信号和欺骗信号的伪码相位偏差较小,式(4)中矩阵H(τ)的列元素近似相关,极大似然估计观测方程病态,参数估计结果存在较大误差,导致欺骗抑制结果的偏差较大。两种不同精度INS辅助的欺骗抑制后的均方根误差(Root Mean Square, RMS)在100~200 s分别为10.0 m和10.2 m,在200~400 s分别为2.3 m和2.3 m。结果统计过程中,时间真值是依据对无干扰条件下GNSS授时结果的线性插值计算得来的。
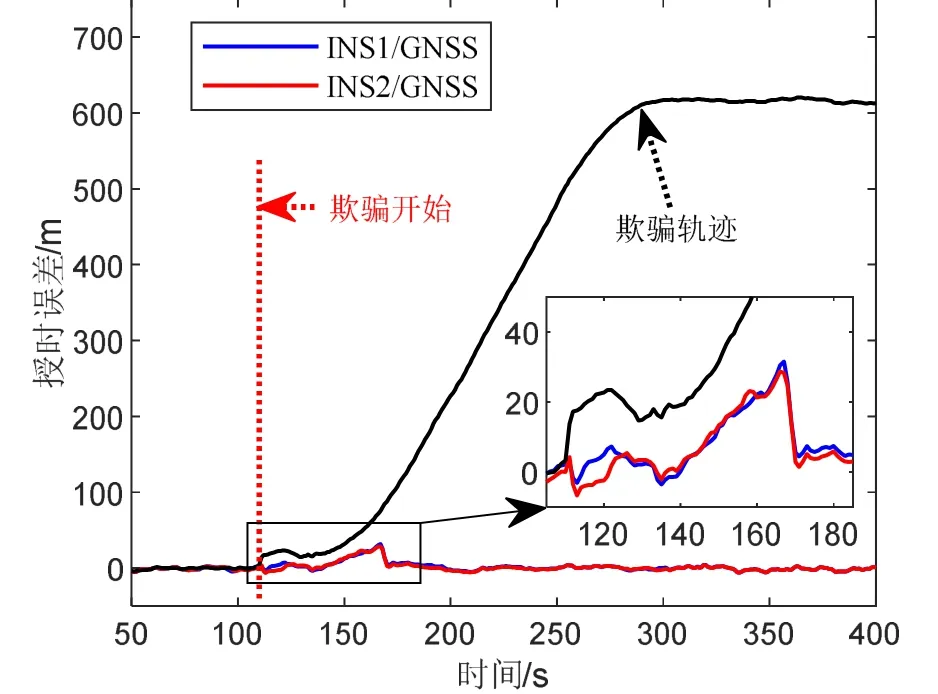
图6 TEXBAT场景ds2欺骗抑制结果(连续定位)Fig.6 Spoofing mitigation results of TEXBAT scenario ds2(continuous positioning)
图7给出了连续定位条件下,本文所提的抗欺骗算法对TEXBAT动态位置欺骗场景ds6的抑制结果。欺骗干扰条件下,地心地固坐标系中Z轴的位置最大偏差由600 m降到10 m左右。图中,蓝色和红色实线代表使用抗差卡尔曼滤波器后不同精度INS对欺骗抑制的结果,虚线代表不使用抗差滤波的结果,从图中可以看出使用抗差滤波后能够抑制异常的GNSS测量结果,降低输出结果的误差。两种不同精度INS辅助的欺骗抑制后RMS在100-200 s分别为9.5 m和10.0 m,在200-400 s分别为4.8 m和5.1 m。
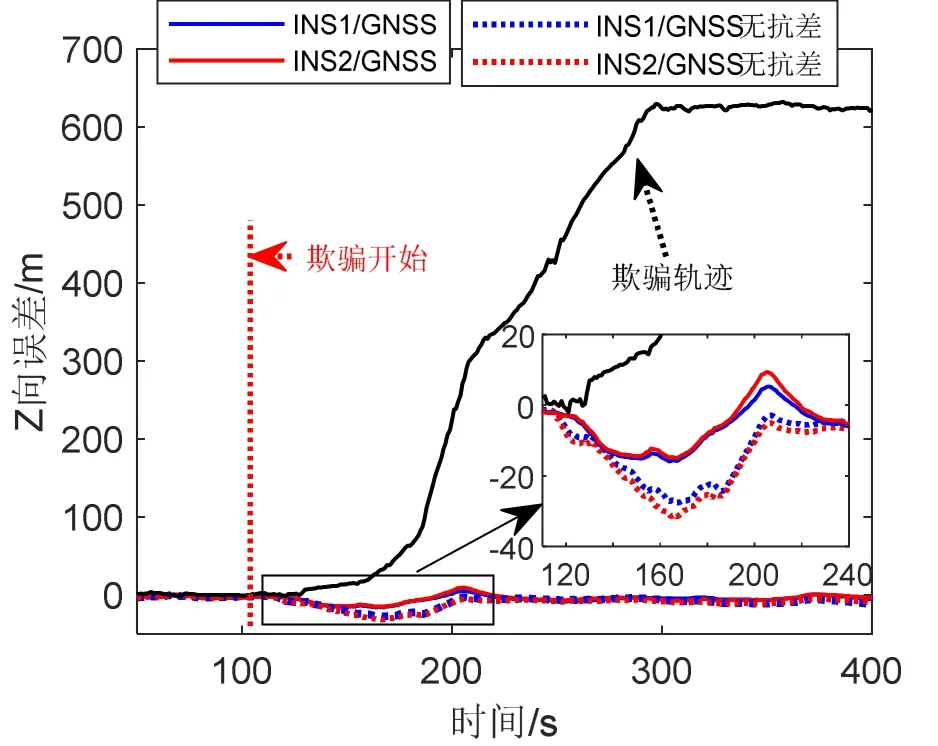
图7 TEXBAT场景ds6欺骗抑制结果(连续定位)Fig.7 Spoofing mitigation results of TEXBAT scenario ds6(continuous positioning)
由于GNSS信号的脆弱性,在使用过程中容易受到遮挡、干扰等影响而不能使用,INS解算不受外界干扰影响。为了验证GNSS信号中断恢复后,INS辅助的欺骗信号辨识和抑制能力,在TEXBAT欺骗场景ds2原始中频数据文件的100~190 s中加入大功率噪声干扰,使得接收机所有卫星信号完全失锁,190 s后干扰停止,GNSS接收机重新开始工作。图8给出了干扰前后,GNSS输出的时间偏差,对于INS1最大时间偏差为9.0 m(30 ns),对于INS2最大时间偏差为23.2 m(77.3 ns)。
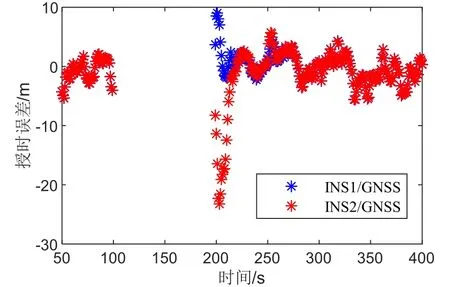
图8 TEXBAT场景ds2欺骗抑制结果(100~190 s干扰)Fig.8 Spoofing mitigation results of TEXBAT scenario ds2(jamming 100-190 s)
图9给出了对TEXBAT欺骗场景ds6中100~190 s加入干扰后不同精度INS输出的定位轨迹。其中,绿色“+”代表干扰期间接收机输出的运动轨迹,黑色实线代表被欺骗接收机输出的在地心地固坐标系中的运动轨迹,欺骗轨迹在Z轴最终被拉偏了600 m,在X轴和Y轴基本没有变化。从图中可以看出,GNSS信号恢复后,组合导航输出的轨迹没有被欺骗信号拉偏,在INS辅助下实现了对欺骗信号的辨识和抑制。
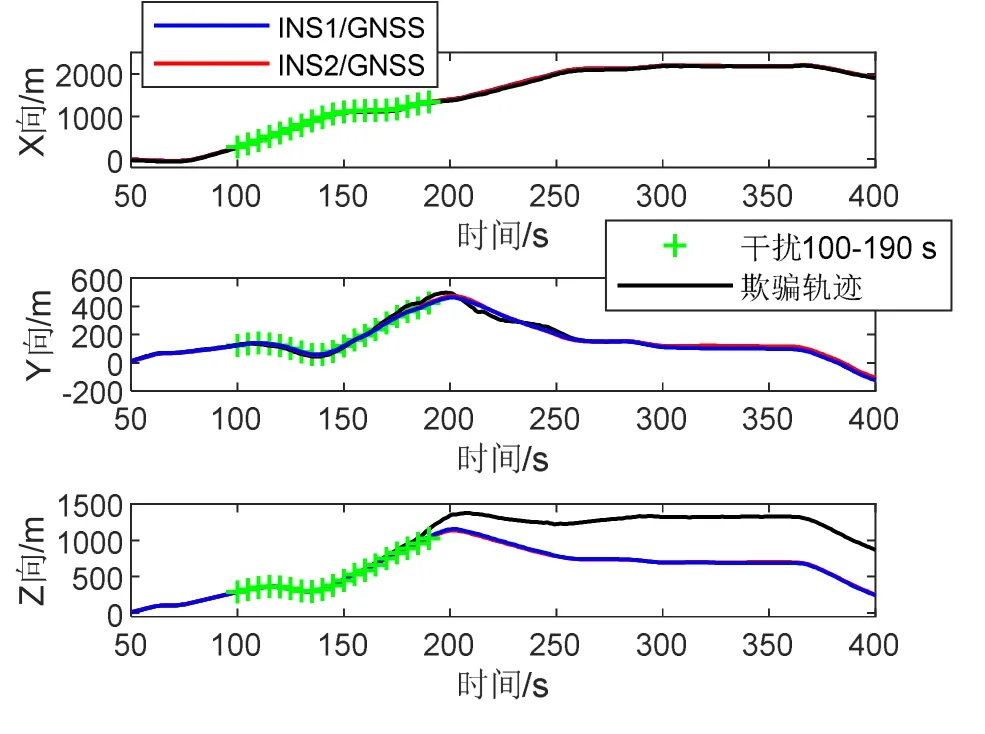
图9 TEXBAT场景ds6欺骗抑制后轨迹(100~190 s干扰)Fig.9 Trajectory after spoofing mitigation of TEXBAT scenario ds6 (jamming 100-190 s)
图10给出了在100~190 s干扰条件下,不同精度INS输出三维位置误差随时间的变化曲线。由于组合导航系统在GNSS失锁前对INS误差进行了估计,在GNSS失锁后估计的误差仍然可以对INS进行部分校正。对于INS1输出的最大位置偏差为36.0 m,对于INS2输出的最大位置偏差为49.4 m。在GNSS信号恢复后,可以对INS误差进行校正,组合导航系统输出的位置误差开始降低,可以实现更加准确的欺骗信号辨识和抑制。
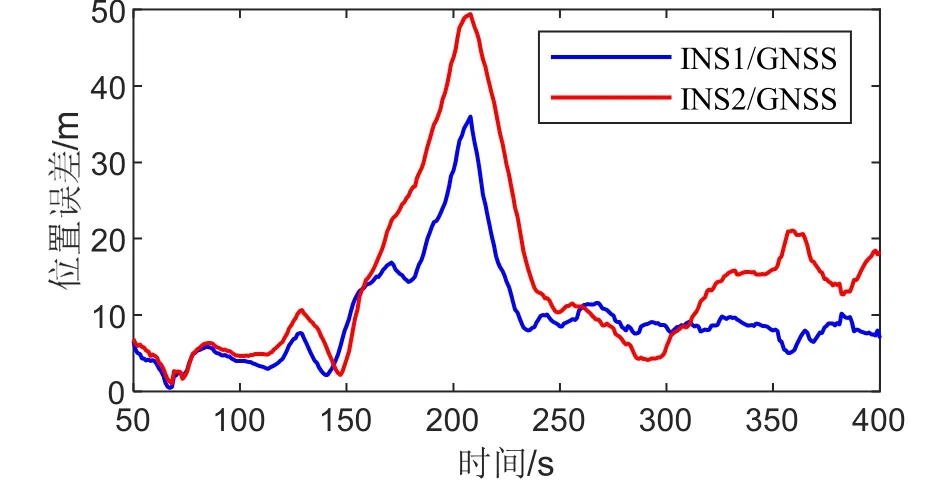
图10 TEXBAT场景ds6欺骗抑制后误差(100~190 s干扰)Fig.10 Positioning errors after spoofing mitigation of TEXBAT scenario ds6 (jamming 100~190 s)
4 结 论
本文将Multi-correlator结构用于真实卫星信号和欺骗信号参数的估计,然后利用INS辅助信息实现了欺骗信号的辨识,最后综合利用信号层的欺骗信号分量修正和伪距层的抗差卡尔曼滤波,保证了接收机始终锁定真实卫星信号,在欺骗干扰条件下输出正确的定位和授时信息。
实验结果表明,所提抗欺骗算法能够在欺骗引起的距离偏差小于10 m时实现欺骗干扰的检测。在连续定位条件下,由于可以持续对INS误差进行校正,使用不同精度INS对欺骗的抑制效果基本一致,基于本文所提算法,能够使欺骗引起的位置和时间偏差降到10 m以下,可以满足大多数用户对定位和授时的精度需要。在GNSS信号中断后,较高精度的INS可以辅助定位和授时结果的快速恢复。
本文所提出的基于INS/GNSS组合的抗欺骗算法能够有效抑制欺骗干扰的影响,保证输出准确的定位和授时信息,提高在动态、遮挡、干扰等复杂环境下系统的工作性能。下一步计划开展以下研究:1)研究不同精度INS、不同GNSS失锁时间条件下组合导航系统输出误差的变化规律,进而分析其对欺骗信号辨识和抑制的影响;2)进一步研究不同相关器数量对欺骗检测和抑制效果的影响;3)基于所提算法,开发基于INS/GNSS组合的抗欺骗实验平台,结合欺骗干扰源开展实物实验,进一步验证所提抗欺骗算法的性能。
猜你喜欢
城市道桥与防洪(2022年1期)2022-02-25
导航定位学报(2022年1期)2022-02-17
河北工业大学学报(2021年4期)2021-09-23
读者·校园版(2020年19期)2020-09-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
英美文学研究论丛(2018年1期)2018-08-16
现代防御技术(2017年2期)2017-05-13