基于改进A*算法的多基地多无人机分阶段任务规划方法
2022-07-06 08:23殷少锋郑献民林宏旭
中国惯性技术学报 2022年2期
郑 锴,尹 栋,殷少锋,郑献民,林宏旭
(1. 32146部队,焦作 454000;2. 国防科技大学 智能科学学院,长沙 410000)
随着战争形态和作战样式的转变,无人机侦察保障要求越来越高,由重要时节和重点方向侦察转变成全时、全域和多任务侦察[1-3]。单一无人机平台受作用半径、续航时间、实用升限和任务载荷等性能局限,往往难以满足实际应用需求,多无人机协同运用将是未来战场的重要作战样式。多无人机任务规划成为国内外广泛关注的课题[4-6]。
任务分配和航迹规划是多无人机任务规划的关键问题。多无人机任务规划研究,通常将任务规划问题分解成子问题,首先基于近似代价进行层次化的任务分配,而后基于分配方案规划航迹[7-11]。文献[7]针对单基地多无人机协同搜索多目标问题,提出分步组合优化方法,应用聚类方法将MTSP(Multiple Travelling salesman problem)问题分解为多个旅行商(Travelling Salesman Problem, TSP)问题,应用遗传算法求解TSP问题,该方法具有较好的计算优势;文献[8]针对多无人机任务分配问题,将任务分配分解为任务分簇、任务簇分配和簇内分配三个阶段,层次化分配方法具有较好的实时性;文献[9]针对有人/无人任务联盟形成问题,采用任务聚类-平台分配的分阶段策略,分别采用贪心聚类策略和人工蜂群算法求解,仿真验证了该方法的有效性;文献[10]针对多目标群多无人机协同任务规划,提出“双重优化”思想,首先运用贪心算法对各目标群群内的目标进行航路规划,而后运用遗传算法对各目标间的目标进行任务规划。文献[11]应用分层优化法解决多协作无人机任务规划问题,融合Dubins和B样条曲线规划多无人机执行多任务航线,估算可能的任务指派产生的消耗,进行任务分配求解,进而应用高斯伪谱法规划无人机飞行航迹。
在当前任务规划方法的研究中,通常简化了任务分配和航迹规划的耦合关系,采用直线或简单曲线航迹估计任务分配中的代价指标,未考虑环境威胁规避和飞行性能等对航迹影响因素,造成任务分配与实际情况存在冲突,任务规划往往不是最优或次优解。
本文针对多无人机疏散配置在多个基地、协同执行多目标侦察的任务规划应用需求,综合考虑任务分配和航迹规划的航程代价耦合关系,基于改进A*算法预估航程代价矩阵,提出了一种基于改进A*算法的多基地多无人机分阶段任务规划方法。该方法系统地给出了一种多基地多无人机多阶段、层次化的任务规划处理流程,包括区域设置、航程估算、多基地多无人机任务分配、基地内单无人机时序分配、航迹搜索、航迹平滑、局部动态规划等多个阶段。该方法改进了A*算法用于预估航程代价和航迹搜索,改进了K-means算法用于任务聚类分配,将问题化繁为简。
1 原理架构
基于改进A*算法的多基地多无人机分阶段任务规划方法的原理架构,如图1所示。具体表述为:①区域设置。在地理信息系统(Geographic Information System, GIS)中,依次点击确定各基地坐标和任务坐标,确定任务规划区域范围,采用不同几何形状标记威胁区域。②任务分配。航程估算阶段,改进A*算法,构建各基地、各任务点之间的A*预估航程矩阵,从而避免直接应用直线欧式距离导致的任务分配误差。多基地多无人机任务分配阶段,当任务数量多、区域集中分布时,基于改进K-means算法,实现目标区域聚类、各基地聚类目标分配、基地内无人机任务分配等;当任务数量少、疏散分布时,采用深度遍历方法实现精确任务分配。基地内单无人机时序任务分配阶段,基于TSP模型进行求解;③航迹规划。采用改进A*算法搜索并绘制航迹,基于三次B样条曲线进行航迹平滑。④动态任务规划。依据威胁区域和任务目标的变化,确定需要执行动态规划的无人机及其局部规划空间,并针对部分无人机和局部区域进行动态任务分配和航迹规划。

图1 多基地多无人机任务规划的原理框图Fig.1 Mission assignment framework of multi-UAVs deployed in different bases
2 区域设置
2.1 区域规划
在地理信息系统中,点击选定并标注多基地、多任务的位置,按点击次序为每个基地和任务编号,确定任务规划的区域范围。规划区域如图2所示,设各基地和任务的最大位置高斯坐标值分别为Xmax、Ymax,最小位置高斯坐标值分别Xmin、Ymin,规划空间的扩展距离值为H。将规划空间离散栅格化,(Xmin-H,Ymin-H)为原点,设h为网格边长,则规划空间中任意点(x,y)的网格坐标(xg, yg)为:

图2 规划空间示意图Fig.2 Schematic diagram of plan area

2.2 威胁设置
基于基础地理信息和战场态势信息,在GIS中标绘出地形障碍、雷达探测、电子对抗、防空火力、禁飞区等飞行威胁区域。根据不同威胁模型的特点,在GIS系统中通过手绘或标注等形式,标记出圆形、矩形、多边形等任意不同形状的威胁区域,并按式(1)计算威胁区域边界的网格坐标。
3 任务分配
3.1 改进A*算法设计
A*算法全局性好、运行较快、易于工程实现,在航迹规划领域获得了广泛关注[12-15]。在任务分配过程中,在考虑距离代价时通常用直线欧式距离近似表示航程,没有考虑威胁区域等约束条件对航程的影响,易于造成任务规划不合理,因此可通过A*算法预估各基地与各个任务点、各个任务点之间的距离,将A*预估距离作为任务分配的航程代价。此外,在航迹规划过程中,A*算法用于实现各基地、各任务点间的航迹搜索。
A*算法的代价函数表示为:

式中,n为当前节点,f(n)为起始点经节点n到目标点的代价函数,g(n)为从起始点到节点n的实际代价,h(n)为节点n到目标点的估计代价。
代价函数g(n)可表示为:

式中,ln为航程代价,Jn为威胁代价,zn为高度代价,ω1、ω2和ω3分别表示航迹代价权值。为确保无人机航迹能够规避所有威胁区域,将威胁代价设为无穷大,令ω2=∞;无人机通常优先采用固定高度巡航,为简化航迹优化问题、减少计算量,设无人机以固定高度巡飞,将三维空间航迹搜索问题简化为二维问题,令ω1=1,ω3=0。
启发函数h(n),引导节点(xn,yn)向目标点(xt,yt)的方向搜索扩展,可表示为:

传统A*算法在栅格节点扩展过程中,节点扩展主要局限在栅格线的交叉点上,可能会导致部分航迹呈锯齿状。为了避免锯齿型航迹,改进A*算法,进行航迹节点再调整,优化部分锯齿型航迹。
图3所示为节点再调整示意图,将虚线航迹优化为实线航迹。设无人机w初始航迹节点序列vw1[r],节点序列数量为r,则节点再调整过程为:a. 初始令j=r;b. 循环检查(vw1[i],vw1[j])之间的连线是否通过威胁区,i∊[1…j-1];若通过威胁区,令i=i+1;若不通过威胁区,令j=i,并将vw1[j]保存为再调整后的航迹节点;c. 重复上述循环,直至j=1,停止循环,生成再调整后的航迹序列vw2[l],调整后的节点序列数量为l。
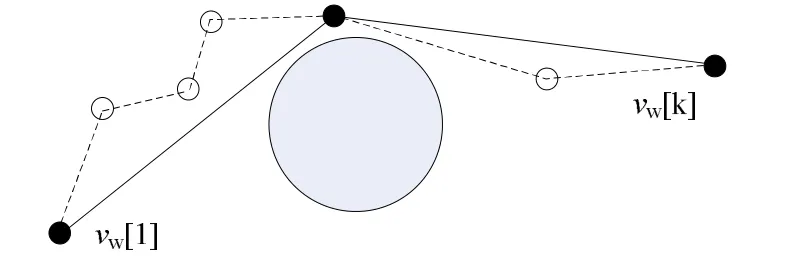
图3 航迹节点调整示意图Fig.3 Schematic diagram of path optimization
图4所示为改进A*算法的主要处理流程。在启发式搜索时,建立OPEN和CLOSE两个表,OPEN表用于存储已经计算但没有扩展的节点,CLOSE表用于存储已经扩展的节点。数据存储结构表示为{(x i,y i),f i,g i,hi,pi},其中,(xi,yi)为节点的网格坐标,fi、gi、hi分别为代价函数的变量值,pi代表当前节点的父节点。具体表述为:

图4 改进A*算法流程图Fig.4 The framework of improved A* algorithm
步骤1 初始化。初始化OPEN和CLOSE表,将起点放入OPEN表中作为当前节点。
步骤2 节点扩展与存储。当前节点的相邻节点,若满足约束条件且不在当前OPEN和CLOSE表中,则将该有效节点加入OPEN表;将OPEN表中代价最小的节点A移到CLOSE表;判断节点A是否为终点,若是终点则退出节点搜索,若不是终点则继续节点扩展。从CLOSE表中提取航迹节点序列vw1[r],将终点的代价函数值作为预估A*航程。
步骤3 航迹节点调整。设vw1[r]中的航迹起点为调整起点,初始航迹终点作为调整中继点;从调整起点开始,依次判断vw1[r]中各航迹点与调整中继点的连线是否经过威胁区域;若调整起点与调整中继点连线通过威胁区域,则将当前调整起点的下一点更新为调整起点,并继续判断是否通过威胁区域;若调整起点与调整中继点连线不通过威胁区域,将当前调整中继点保存为航迹调整后的一个航程点,并将当前调整起点更新为调整中继点,继续循环判断;直至当前调整中继点为起点,停止循环,则各个调整中继点构建出调整后的航迹序列vw2[l]。
通过改进A*算法,分别以各基地和任务点为起止点,启发式搜索航迹,并估算各基地与各个任务点、各个任务点之间的A*预估航程距离。
3.2 多基地多无人机任务分配
设基地序列为P={P1,P2,P3…Pn},基地数量为n;任务目标序列为T={T1,T2,T3…Tm},任务数量为m;构建距离矩阵d[n][m],用于表示每个基地距离每一目标的A*距离;构建距离矩阵表示为q[m][m],用于表示任两个目标之间的A*距离;各基地无人机数量序列为U={U1,U2,U3…Un},用于表示各个基地配置的无人机数量。
图5所示为多基地无人机任务分配编码示意图,确保每项任务均有无人机负责执行。

图5 多基地多无人机任务分配编码示意图Fig.5 Schematic diagram of mission assignment coding
根据任务数量和分布情况,多无人机任务分配可以区分两种情况求解:①任务数量多、区域集中分布时,采用基于目标聚类的求解方法。该方法包括目标区域聚类、聚类目标分配、基地内无人机任务分配等多个处理环节,可将较大规模的目标分配问题化繁为简、时效性和可扩展性好;②任务数量少、疏散分布时,采用基于深度遍历的求解方法。该方法适用于计算规模小、目标聚类初始参数难以确定等情况,简化了求解过程,直接采用深度遍历方法进行精确任务分配。
3.2.1 基于目标聚类的求解方法
基于目标聚类的求解方法包括三个处理环节:目标区域聚类、聚类目标分配、基地内无人机任务分配等。目标区域聚类,是实现目标按地理分布集聚特性进行区域聚类;聚类目标分配,是实现将各个聚类目标区域分配给距离最近的无人机基地;基地内无人机任务分配,是实现无人机基地内多架无人机的目标分配。
K-means聚类算法是一种迭代求解的聚类分析方法,其原理简单、收敛速度快、实用性好[16,17]。采用各目标间距离作为相似性评价指标,通过多轮循环迭代,最终确定K个紧凑且相对独立的目标聚类。需要注意的是,由于无人机基地的异构性,各无人机基地配备的无人机数量和型号不同,因此聚类目标不应超出其距离最近基地的任务能力值,需要关注各基地的总任务航程这一约束条件。
结合具体应用背景,在初始聚类中心选取、添加任务总航程约束、确定聚类目标对应的基地等方面,对传统K-means算法进行改进。改进K-means聚类算法的处理流程,如图6所示为:

图6 改进K-means聚类算法的流程图Fig.6 The framework of improved K-means algorithm
步骤1 目标聚类初始化。选取K个位置分散的目标点为初始聚类中心。传统的随机选取初始聚类中心的方法,容易导致聚类效果不佳,因此根据GIS系统上各位置点的分布,手动点击选择K个相对离散、可能接近目标区域中心的位置点,作为初始聚类中心点;
步骤2 确定无人机基地与目标聚类的对应关系。将无人机基地分配给距离最近的聚类中心点;
步骤3 循环目标聚类。循环计算各目标点到各个聚类中心的距离,将每个目标划入其距离最近的目标区域类中。为避免聚类区域的目标数量超出距离最近基地的任务能力,基于航程代价进行判断。若随机选取一个聚类目标序列,其与对应基地之间总航程超过基地内所有无人机最大航程,则从该目标类中选择距离邻近目标聚类中心最近的一个目标,将该目标加入邻近目标聚类中;
步骤4 更新目标聚类中心点。根据所有数据点的平均距离值计算区域质心位置,将聚类中心调整至各区域类的中心目标点;
步骤5 重复步骤2、3和4,直至聚类中心不再变化或达到最大的迭代次数。
通过改进后的K-means目标聚类方法,实现目标区域聚类和聚类目标分配等两种功能,将目标按地理分布分成任务区域、并将任务区域分配给距离最近的无人机基地。
单个基地内的无人机任务分配,若单架无人机能够完成任务,则优先使用单无人机执行;若单架次无人机无法完成所有任务,则结合执行任务的总航程和单机的最大航程,估算出所需的无人机数量,进而采用K-means聚类方法进行基地内的多无人机任务分配。最终为每架无人机分配任务,第w架无人机对应的任务分组为hw[k]。
3.2.2 基于深度遍历的求解方法
任务数量少、疏散分布时,通常计算规模较小,可简化求解环节,直接采用深度遍历方法进行精确任务分配。为每个基地分配距离最近的目标,目标函数Z表示为:

其中,dij为无人机i到目标j的A*距离。
约束条件为:①最大航程约束。单个基地的无人机执行多任务的总航程不能超出其最大航程Lmax。②任务约束。每个基地一架无人机参与任务,每个目标至少有一架无人机去执行任务。
深度遍历精确求解的流程表述为:
步骤1 按照目标序列T的编号,从第一个目标开始依次循环;对比目标与每个无人机基地的距离,选择出距离当前目标最近的无人机基地;依次循环比较,最终确定与目标序列T对应的无人机基地序列,设为H={H1,H2,H3…Hm}。
步骤2 结合序列T和H的对应关系,为每架无人机分配任务,获得第w架无人机对应的任务分组为hw[k]。
3.3 基地内单无人机时序任务分配
在多基地无人机任务分配方案中,若单个无人机分配了多项任务,则需进行单无人机多任务时序分配。单无人机时序任务分配,采用了TSP旅行商模型。传统的TSP模型求解时,在计算各路径点之间的距离时,通常是将各点之间距离简化为直线欧式距离[18,19]。在复杂高对抗的战场环境下,目标点间距离若不考虑规避威胁区域,将存在较大的误差,TSP求解将难以获取合理的结果。因此,改进传统TSP求解方法,任意两点的距离采用A*算法预估距离。
充分考虑规避威胁区域,采用A*算法估算出无人机起飞点、多个任务目标点之间的距离。对于第w架无人机,其对应的任务分组为hw[k],构建出A*距离矩阵表示为pw[k][k],k为第w架无人机的对应任务数。
目标函数R表示为:

其中,hij为无人机从目标i到目标j的A*距离,cij∊{0,1}为决策变量。
若时序任务分配规模较小,优先采用遍历法,循环比较任何一种可能方案,准确获得最优解。若时序任务分配规模较大,精确算法求解计算量过大,采用遗传算法求解[20]。
4 航迹规划
4.1 航迹寻优
基于多无人机任务分配和单机时序任务分配的分配方案,依据每架无人机的任务序列分别进行航迹规划,应用改进A*算法进行航迹寻优。A*算法按照3.1执行。
以第w架无人机为例,无人机w的起点、时序序列uw[k]中的各任务点、无人机w的回收点构成航迹点序列,从起点开始,依次将航迹序列中的两个连续时序节点作为A*搜索的起止点,获得各连续节点之间的初始航迹序列vw1[r]、及调整后航迹序列vw2[l]。任意两个时序连续节点间的vw2[l],组合在一起最终构成第w架无人机的总航迹vw3[q],总航迹点数量为q。
将无人机的航迹点vw3[q],进行地理坐标转换,绘制在地理信息系统上,可得到无人机航迹图。依次绘制每架无人机的航迹点,得到多基地多无人机的航迹规划图。
4.2 航迹平滑
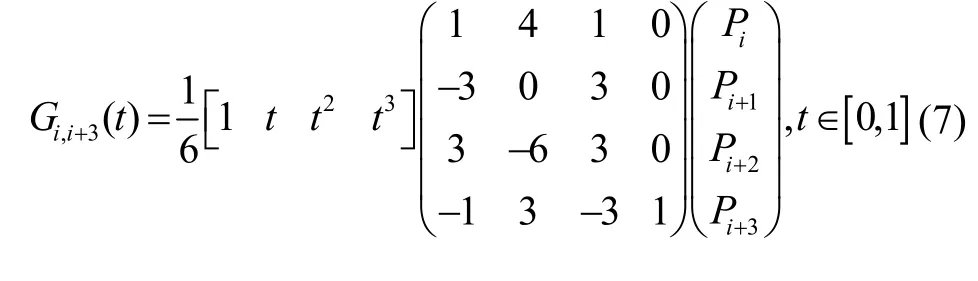
航迹寻优绘制的航迹为折线图,不符合实际航迹,需要进行航迹平滑处理,得出满足飞行约束的航迹曲线。三次B样条曲线具有局部性、凸包性和C2连续性等特点,平滑效果好[21]。
基于A*算法航迹寻优获得的航迹控制点为Pi(i=0,1 …n),采用三次B样条曲线进行平滑处理,每段曲线由连续相邻4个航迹控制点确定。三次B样条曲线可表示为:
5 局部动态任务规划
在复杂多变的战场环境中,往往存在突发威胁、目标变化等情况,全局规划航迹将不能满足任务的动态需求。根据战场态势变化,在预先全局规划的基础上,仅进行局部动态规划,从而可缩小规划空间、减少规划时间。具体表述如下:
①局部区域设置。根据威胁区域和目标变化情况,在GIS中点击选定局部规划的起点、多个目标点、终止点的位置,标绘局部威胁区域,确定局部规划空间。初始点和终止点通常选在威胁区域边界附近的预先规划航迹上,中间点为无人机必须经过的一些目标点,包括预先已知目标点和动态变化的目标点。
②局部任务动态分配。依据改进A*算法,构建局部规划起点、多个目标点、终止点之间的A*预估航程矩阵;基于旅行商模型和遗传算法,求解各点的时序任务分配。
③局部航迹动态规划。采用改进A*算法规划并绘制航迹,基于三次B样条曲线法进行航迹平滑,规划出局部起点、各中间点、终止点之间的航迹。
6 实验验证
针对多无人机任务规划的应用需求,采用Visual Studio 2015与QT5.8开发环境、以及C++编程语言,基于本文提出的任务规划方法,开发了多无人机任务规划软件。图7所示为任务规划软件的主界面,软件界面主要包括菜单栏、GIS显示区域、状态显示区域、任务规划子界面等,任务规划子界面包括基本设置(网格设置、标绘设置、分配设置等)、任务规划按键(位置选取、区域设定、威胁标绘等)、以及任务显示区域。
任务规划测试的主要操作流程为:输入或选取各初始设置参数;依次点击无人机选取、目标选取、区域设定、威胁标绘、威胁确定等按键,并相应在GIS区域点击确定各位置点、绘制威胁区域,实现规划区域设置;点击航程估算、聚类选取、目标聚类、任务分配等按键,实现任务分配,分配结果以图示形式在任务显示区域显示;点击航迹搜索、航迹调整和航迹平滑等按键,航迹规划结果在GIS界面中绘制并显示。
测试1 基于改进K-means聚类求解的分阶段任务规划流程测试。按照任务规划处理流程,逐步骤进行分析验证,多基地多无人机任务分配阶段采用K-means聚类的方法求解。
(1)参数设置
规划区域内包括3个无人机基地和18个目标,规划空间约80 km×70 km,网格边长h为1 km,扩展距离H为20 km,无人机最大航程200 km。
(2)测试结果分析
图7(a)所示为,分别在GIS中点击确定了无人机基地和目标的位置,目标分布呈现区域集中的分布态势,以手绘形式标记出任意形状的多个威胁区域,点击“航程估算”预估出各个位置点之间A*航程,点击“聚类选取”确定了3个目标初始聚类中心,GIS区域的实心圆点表示初始聚类中心;图7(b)所示为,点击“目标聚类”实现目标区域聚簇,GIS区域的实心圆点分别为初始聚类中心及K-means聚类后的中心,点击“任务分配”,将3个聚类目标群分配至3个无人机基地,分配结果显示在任务显示区域;图7(c)所示为,点击“航迹搜索”后,在GIS区域绘制出各无人机与其时序任务之间的A*搜索航迹,可以看出航迹能够规避障碍,但由于A*搜索局限在栅格交叉点而导致部分航迹呈锯齿状;图7(d)所示为,点击“航迹调整”后,绘制出调整优化后的航迹,将部分A*搜索锯齿型折线航迹段优化为直线;图7(e)所示为,点击“航迹平滑”后,在GIS区域绘制出B样条平滑航迹;图7(f)所示为,分别在局部区域标志出局部起点、2个中间点、局部终点,标绘更新后的威胁区域,在动态规划子界面,点击“任务分配”,求出时序任务分配结果;点击“航迹搜索、航迹调整、航迹平滑”后,规划出局部动态航迹曲线。

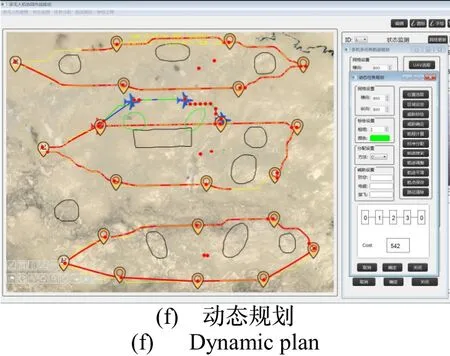
图7 基于K-means聚类求解的任务规划测试Fig.7 Mission plan test with K-means algorithm
测试结果表明,目标聚簇分配和目标时序分配合理,航迹规避了障碍区域,通过航迹调整和航迹平滑优化了复杂威胁条件下无人机航迹,动态任务规划结果合理,测试过程计算无明显时延。
测试2 基于深度遍历求解的分阶段任务规划流程测试。按照任务规划处理流程,逐步骤进行分析验证,多无人机任务分配阶段采用深度遍历方法求解。
(1)参数设置
规划区域内包括5个无人机基地和7个目标,规划空间约80 km×70 km,网格边长h为1 km,扩展距离H为20 km,无人机最大航程200 km。
(2)测试结果分析
图8(a)所示为,分别在GIS中点击确定了无人机基地和目标位置,目标数量较少、呈疏散分布态势,以手绘形式标记出任意形状的多个威胁区域,点击“航程估算”预估出各个位置点之间A*航程,点击“任务分配”为每个目标分配无人机,2个无人机基地参与执行任务,分配结果显示在任务显示区域;图8(b)所示为,点击“航迹搜索”,在GIS区域绘制出各无人机与其时序任务之间的A*搜索航迹;图8(c)所示为,点击“航迹调整”,将部分A*搜索锯齿型折线航迹段进行优化;图8(d)所示为,点击“航迹平滑”后,在GIS区域绘制出B样条平滑航迹。图8(e)所示为,分别标记2组局部起点、中间点、局部终点,标绘更新威胁区域,点击“任务分配”,求出任务分配结果;点击“航迹搜索、航迹调整、航迹平滑”,规划出2组局部动态航迹曲线。
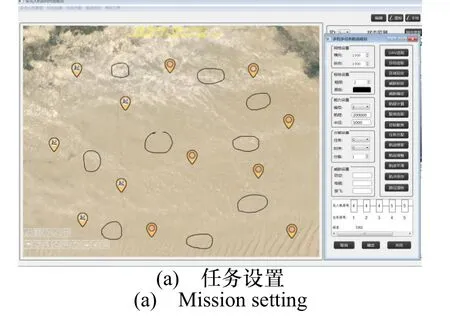
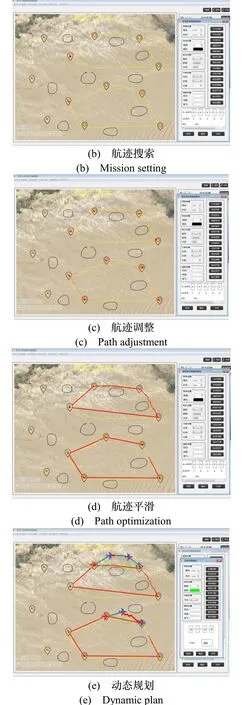
图8 基于深度遍历求解的任务规划测试Fig.8 Mission plan with depth first search algorithm
测试表明,疏散分布的目标合理分配至各无人机基地,各无人机航迹有效规避了威胁区,通过航迹调整和航迹平滑优化了复杂威胁条件下的无人机航迹。动态任务规划结果合理,测试过程无明显时延。
测试3 传统A*算法和改进A*算法的比较分析。结合测试1中的图7(c)和7(d)进行比较分析,图7(c)所示为按照传统A*算法绘制的航迹,图7(d)所示为按照本文改进A*算法绘制的航迹。表1所示为改进A*算法的比较分析表,给出了传统A*和改进A*算法的航迹参数表。

表1 改进A*算法的比较分析Tab.1 Comparison of improved A* algorithm
通过比较表明,改进A*算法有效滤除了冗余航迹节点,抑制了锯齿形搜索航迹,缩短了无人机航程,航程缩短了4%以上。进而易于通过航迹平滑获取优化航迹。
测试4 应用改进A*预估距离与欧式预估距离的任务规划比较分析。图9所示为应用欧式预估距离的任务规划测试结果,在任务分配过程中的航程代价均应用欧式直线距离。图10所示为本文所提出方法的测试结果,在任务分配过程中的航程代价均应用改进A*预估距离。多基地多无人机任务分配阶段采用改进K-means聚类的方法求解。表2所示为应用改进A*预估距离的任务规划比较分析表,给出了两种方法的测试结果。

图9 应用欧式预估距离的任务规划测试Fig.9 Mission plan with Euclidean estimated route

图10 应用改进A*预估距离的任务规划测试Fig.10 Mission plan with improved A* estimated route
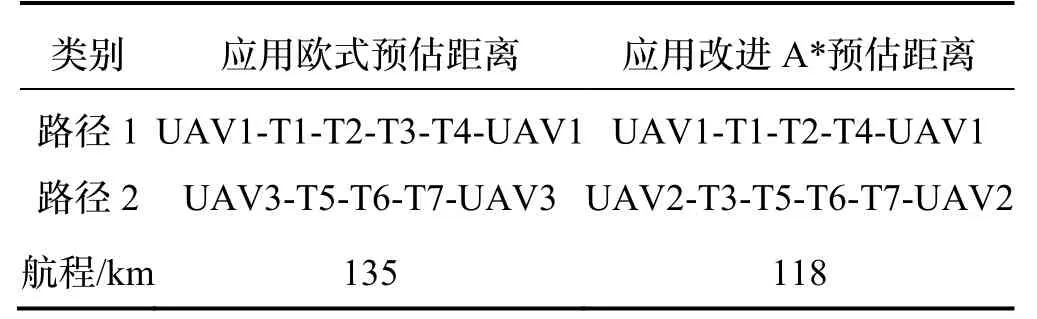
表2 应用改进A*预估距离的任务规划比较分析Tab.2 Comparison of mission plan with improved A*route
通过比较表明,应用改进A*预估距离时,在目标区域聚类、聚类目标分配阶段中,均能够顾及威胁障碍区对于预估距离的影响,而直线欧式预估距离无法考虑障碍区影响,应用改进A*预估距离的任务规划具有更短的航程。航程缩短了12%。
7 结 论
本文系统地给出了一种多基地无人机多阶段、层次化的任务规划处理流程,开发了多无人机任务规划软件,验证了所提出方法的有效性。主要结论如下:(1)改进了传统A*算法,通过航迹调整,剔除冗余节点,将节点栅格扩展的锯齿型折线优化为直线航迹;(2)考虑任务分配和航迹规划的航程耦合关系,在多阶段任务分配中,应用改进A*算法预估航程矩阵,生成满足威胁规避和飞行性能约束的任务分配方案;
(3)在初始聚类中心选取、添加任务总航程约束、确定聚类目标对应的基地等方面,改进传统的K-means算法,实现了目标区域聚类和聚类目标分配等功能。
本文方法主要适用于静态确定威胁环境,对于动态不确定环境适应性不强。下一步,需要结合动态不确定的战场威胁、任务变更、飞机损毁等对抗性行动展开研究,精确评估威胁模型和威胁度,针对多种不确定要素进行综合任务规划,提高对抗性环境下任务规划方法的实用性。
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
舰船科学技术(2022年11期)2022-07-15
海峡姐妹(2019年5期)2019-06-18
现代计算机(2018年27期)2018-10-25
百科探秘·航空航天(2017年12期)2018-01-31
舰船电子对抗(2017年6期)2018-01-11
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
航海(2016年2期)2016-05-19
互联网天地(2016年1期)2016-05-04