基于三绕组变压器的锂电池组自适应交错控制均衡方案
2022-07-07 02:12王肖帅李佩柯
储能科学与技术 2022年4期
郑 征,王肖帅,李 斌,黄 涛,李佩柯
(1河南理工大学电气工程与自动化学院,河南焦作 454000;2都灵理工大学能源系,意大利都灵市 10129)
当前,储能技术已经成为实现“双碳”目标和能源革命的关键核心技术,具有重要的战略意义。锂电池由于能量密度大、寿命长、无记忆性、自放电率低等优点[1],被广泛应用于储能系统中。为满足储能系统的需求,锂电池通常以串联电池组的形式出现[2],锂电池在生产过程中由于制造工艺、外界环境等方面的差异,导致其在容量、内阻、自放电率等方面存在差异,而且在循环使用中这种差异会逐渐增大[3],从而产生电池组的不一致性问题,影响电池组的使用寿命。目前电池均衡技术是解决电池组电池单体不一致性问题最有效的方法之一,电池均衡技术的研究对电池储能系统的发展具有重大意义。
主动均衡法是目前均衡技术研究的主流[4],通过储能元件来实现均衡能量在均衡对象之间的转移,相较于利用电阻消耗能量的被动均衡,主动均衡法具有更高的效率和速度。根据均衡类型的不同,主动均衡可以分为整体-单体、单体-整体、直接单体-单体和相邻单体-单体四种类型。而根据储能元件的不同,主动均衡又可以分为电感式拓扑[5-9]、电容式拓扑[10-12]和变压器式拓扑[13-18]等,其中变压器式均衡拓扑具有结构简单、均衡速度快、效率高、均衡路径短且具有均衡过程中电池放电回路与充电回路存在电气隔离的优点,本工作即是以变压器式均衡电路展开研究。
文献[13]提出了一种基于多绕组变压器的直接单体-单体类型的均衡电路,该类型电路能够实现能量在目标电池之间的直接转移,在电池组不出现少量电池电压特别低或特别高的极端状况时,具有较快的均衡速度;但当极端状况发生时,其均衡速度将会变慢;而且该电路工作在正激模式下,工作时主要依赖于电池之间的电压差,当两块电池电压差值较小时会出现无法有效均衡的情况,不仅均衡精度低,而且还需要加入额外的消磁电路来防止磁芯饱和,造成体积和成本的增加。文献[15]提出另一种多绕组变压器的直接单体-单体类型的均衡电路,电路工作在反激模式,相对于文献[13]不仅改善了均衡精度低的问题,而且可以实现变压器磁芯的自动复位,但该均衡电路仍具有文献[13]电路存在的无法很好应对极端状况以及体积较大的缺点,同时还具有控制电路较复杂的问题。文献[18]提出一种单变压器的整体-单体类型的均衡电路,该电路中只含有一个变压器,相对于文献[13]与文献[15]具有更小的体积,同时控制信号仅采用一组固定占空比的互补PWM 波,控制电路相对于文献[15]简单,但该电路是电池组与电压最低电池之间进行能量转换,只能实现最低电压的升高,这是整体-单体均衡类型的缺陷,该类型只适用于电池组中出现少量电压特别低、其他电池电压相差不大的状况。
通过上述分析,可以看出当前的均衡方案大多仅采用一种均衡类型,然而每一种均衡类型都具有各自的优势与缺陷,仅采用单一均衡类型势必会造成均衡方案不能在所有的状况下均实现电池组的快速均衡,因此本文提出一种基于三绕组变压器并融合了整体-单体、直接单体-单体和单体-整体三种均衡类型的主动均衡方案,三种均衡类型相互配合,扬长避短,该方案包括均衡拓扑电路以及对应的自适应交错控制策略。电路工作在反激模式下,仅含有一个三绕组变压器,相对于多绕组变压器拓扑具有更小的体积;提出的自适应交错控制策略使电路可以根据电池组所处的状况自适应地切换到最佳的均衡类型,充分发挥各均衡类型的特点,从而提高均衡速度。
1 均衡方案设计
1.1 均衡拓扑结构及工作原理分析
本工作提出的均衡拓扑结构图如图1所示,该拓扑主要由电池组单元、开关矩阵单元和储能传输单元三部分构成。图中MOS 管Sn1和Sn2(Sn3和Sn4)组成的单元可以实现均衡能量的双向流动,Sn1和Sn2主要服务于电池Bn的充放电过程,S(n-1)3和S(n-1)4主要服务于电池Bn-1的充放电过程;三绕组变压器作为储能元件,通过对均衡能量的吸收与释放,实现均衡能量在不同均衡对象之间的直接转移。在拓扑电路工作时,变压器的三个绕组将构成两个反激变换器,一个是由绕组W1与绕组W3构成的双向反激变换器Ⅰ,另一个是由绕组W2与绕组W3构成的反激变换器Ⅱ。

图1 均衡拓扑结构Fig.1 Balanced topology
为防止变压器磁芯饱和以及保证电路的均衡精度,拓扑电路工作在反激模式与电流断续模式(discontinuous current mode,DCM)下,同时假设MOS管与变压器工作在理想条件下。
该电路可工作在三种模式且各模式相互独立,第一种是电池组与最低电压电池之间进行能量传递,定义为模式Ⅰ(整体-单体);第二种是最高电压电池与最低电压电池之间进行能量传递,定义为模式Ⅱ(直接单体-单体);第三种是最高电压电池与电池组之间进行能量传递,定义为模式Ⅲ(单体-整体)。假设电池组中电池B1的电压最高,电池Bn的电压最低,各模式具体工作原理分析如下。
1.1.1 模式Ⅰ(整体-单体)工作原理分析
模式Ⅰ是电池组释放能量给电池Bn吸收,属于整体-单体的均衡类型,电路工作在该类型下可以使电池组中的最低电压快速上升,这是这种均衡类型的特点。
该模式下的变压器绕组电流波形如图2 所示,图中iw1、iw3分别为模式Ⅰ下绕组W1、W3的均衡电流;D1为模式Ⅰ控制信号的最大占空比(具体参数计算在3.1中分析),PWM1+与为互补信号;T为开关周期;n1为绕组W1与W3的匝数比。

图2 模式Ⅰ变压器电流波形图Fig.2 Transformer current waveforms,Mode I
该模式在一个开关周期内的工作过程可分为两个阶段,其工作原理图如图3所示。
第一阶段(0~D1T):其电流通路如图3 中实线所示,t=0 时刻,给与绕组W1串联的Sw1施加高电平使Sw1导通,其他MOS管不导通,电池组释放能量输送给变压器绕组W1,电流iw1线性增加;在t=D1T时刻,PWM1+给Sw1施加低电平使Sw1关断,电流iw1增加到最大值Iw1,max,变压器储存接收的能量。
第二阶段(D1T~T):其电流通路如图3 中虚线所示,t=D1T时刻,Sw1关断;同时,PWM1-给与电压最低电池Bn相关的Sn2和Sn3以及与绕组W3串联的Sw32施加高电平使其导通,其他MOS管不导通,此时变压器储存的能量通过绕组W3经Sn1、Sn4和Sw31的体二极管释放,绕组W3获得最大均衡电流n1Iw1,max,当绕组W3的电流iw3=0 时,变压器储存的能量全部输送给电池Bn,变压器磁芯复位,完成能量从电池组到电压最低电池Bn的直接转移。
至此,模式Ⅰ(整体-单体)完成了一个开关周期的能量转移。
1.1.2 模式Ⅱ(直接单体-单体)工作原理分析
模式Ⅱ是电池B1释放能量给电池Bn吸收,属于直接单体-单体均衡类型,该类型是目前普遍认为最佳的均衡类型;但当电池组处在极端状况(如电池组中存在少量电池电压特别高或特别低)时,该类型的均衡效果会变差。
该模式下变压器绕组电流波形图如图4 所示。图中i'w2、iʹw3分别为模式Ⅱ下绕组W2、W3的均衡电流;D2为模式Ⅱ控制信号PWM2+的最大占空比(具体参数计算在第3 部分中分析),PWM2+与PWM2-为互补信号;n2为绕组W2与W3的匝数比。
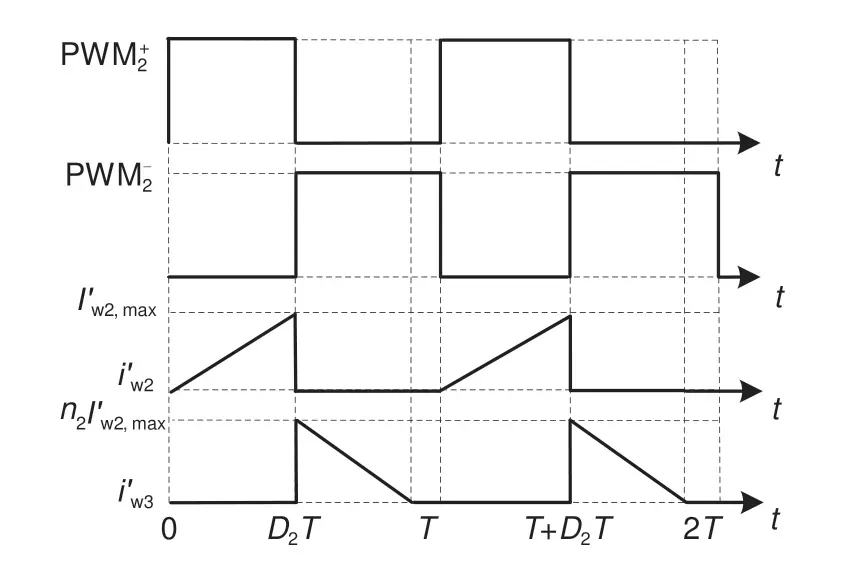
图4 模式Ⅱ变压器电流波形图Fig.4 Transformer current waveforms,Mode Ⅱ
该模式在一个开关周期内的工作过程可分为两个阶段,其工作原理图如图5所示。

图5 模式Ⅱ工作原理图Fig.5 Working principle of Mode Ⅱ
第一阶段(0~D2T):其电流通路如图5 中实线所示,t=0时刻PWM2+给与电压最高电池B1相关的S11和S14以及与绕组W2串联的Sw2施加高电平使其导通,其他MOS管不导通,此时B1释放能量经S12和S13的体二极管输送到变压器绕组W2,电流i'w2线性增加;在t=D2T时刻,PWM2+给导通的MOS 管施加低电平使其关断,此时电流iʹw2增加到最大值I'w2,max,变压器储存接收的能量。
第二阶段(D2T~T):其电流通路如图5 中虚线所示,t=D2T时刻,在第一阶段导通的MOS管关断的同时,PWM2-给与Bn相关的Sn2和Sn3以及与绕组W3串联的Sw32施加高电平使其导通,其他MOS 管不导通,此时变压器储存的能量通过绕组W3经Sn1、Sn4和Sw31的体二极管释放,绕组W3获得最大均衡电流n2I'w2,max,当绕组W3的电流i'w3=0时,变压器储存的能量全部输送给电池Bn,变压器磁芯复位,完成能量从电压最高电池B1到电压最低电池Bn的直接转移。
至此,模式Ⅱ(直接单体-单体)完成了一个开关周期的能量转移。
1.1.3 模式Ⅲ(单体-整体)工作原理分析
模式Ⅲ是电池B1释放能量给电池组吸收,属于单体-整体均衡类型,电路工作在该类型可以实现电池组中最高电压的快速下降,这是该类型的特点。
该模式下的变压器绕组电流波形如图6 所示,图中i''w1、i''w3分别为模式Ⅲ下绕组W1、W3的均衡电流;D3为模式Ⅲ控制信号PWM3的最大占空比(具体参数计算在第3部分中分析)。

图6 模式Ⅲ变压器电流波形图Fig.6 Transformer current waveforms,Mode Ⅲ
该模式在一个开关周期内工作过程可分为两个阶段,其工作原理图如图7所示。
第一阶段(0~D3T):其电流通路如图7 中实线所示,t=0 时刻,PWM3给与B1相关的S11和S14以及与绕组W3串联的Sw31施加高电平使其导通,其他MOS管不导通,此时B1释放能量经S12、S13和Sw32的体二极管输送给变压器绕组W3,电流i'ʹw3线性增加;在t=D3T时刻,PWM3给导通的MOS管施加低电平使其关断,电流i'ʹw3增加到最大值I'ʹw3,max,变压器储存接收的能量。
第二阶段(D3T~T):其电流通路如图7 中虚线所示,t=D3T时刻,第一阶段导通的MOS 管关断,此时变压器储存的能量将通过绕组W1经Sw1的体二极管释放,绕组W1获得最大均衡电流I'ʹw3,max/n1,当绕组W1的电流i'ʹw1=0时,变压器储存的能量全部输送给电池组,变压器磁芯复位,完成能量从电压最高电池B1到电池组的直接转移。

图7 模式Ⅲ工作原理图Fig.7 Working principle of Mode Ⅲ
至此,模式Ⅲ(单体-整体)完成了一个开关周期的能量转移。
1.2 自适应交错控制策略
由工作原理分析可知,该均衡电路可以工作在三种模式下,分别对应整体-单体、直接单体-单体和单体-整体均衡类型,三种模式各有特点,为综合发挥各模式优势、扬长避短,提出自适应交错均衡控制策略,使电路可以根据电池组所处状况的不同自动调节工作模式,最终实现电池组的快速均衡。
相对于电池的SOC(state of charge)值,其端电压值更易监测而且不影响均衡效果,因此本工作选择电池的端电压作为均衡指标变量,电池组中最高电压Umax同电压平均值Uave的差值∆U1与电压平均值Uave与最低电压Umin的差值∆U2作为判断均衡电路工作状态的依据。通过判断∆U1、∆U2与均衡电路启动阈值φ的关系,来确定电路是否工作;通过判断∆U1与∆U2差值的绝对值与模式判断阈值β的关系,来判断电路工作在哪种模式下。均衡策略流程图如图8所示。

图8 自适应交错控制策略流程图Fig.8 Adaptive interleaving control strategy
均衡电路具体工作过程如下。
首先,控制电路找到电池组中的Umax、Umin与Uave,并计算∆U1与∆U2的大小,然后判断∆U1与φ的关系。
若∆U1>φ,说明此时电压最高的电池需要均衡,再判断∆U2与φ的关系。
若∆U2≤φ,说明电压最低的电池不需要均衡,此时电路工作在模式Ⅲ(单体-整体),使电池组中最高电压下降;若∆U2>φ,说明电压最高电池与电压最低电池都需要均衡,此时需要再判断∆U1与∆U2差值的绝对值与β的关系。
若|∆U1-∆U2|≤β,说明电池组中最高电压与最低电压两者偏离平均电压的程度几乎相同,此时电路工作在模式Ⅱ(直接单体-单体),同时实现电池组中最高电压的下降与最低电压的上升;若|∆U1-∆U2|>β且∆U1>∆U2,说明电池组中最高电压偏离平均电压的程度大,此时电路应先工作在模式Ⅲ,先使最高电压下降,直到|∆U1-∆U2|≤β时,再使电路工作在模式Ⅱ;若|∆U1-∆U2|>β且∆U1<∆U2时,此时电路应先工作在模式Ⅰ(整体-单体),先使最低电压上升,直到|∆U1-∆U2|≤β时,再使电路工作在模式Ⅱ。
若∆U1≤φ时,此时电压最高的电池不需要均衡,再判断∆U2与启动阈值φ的关系,若∆U2>φ,说明电压最低的电池需要均衡,此时电路工作在模式Ⅰ即可,实现电池组最低电压的升高;若∆U2≤φ,说明电压最低的电池也不需要均衡,此时电路不工作。循环往复,最终实现电池组的均衡。
2 均衡参数设计
均衡参数主要包括占空比D、变压器参数等。变压器参数主要是变压器的绕组电感、绕组匝数比等。本工作主要以模式Ⅰ为例进行参数计算,由于锂电池单体最大充、放电电流的限制,我们需要确定均衡电路的最大均衡电流的大小来确保电路的稳定性,然后再对电路的其他参数进行计算。
2.1 占空比D
电路工作在模式Ⅰ,变压器绕组W1与绕组W3构成反激变换器Ⅰ,绕组W1作为反激变换器原边绕组,绕组W3作为反激变换器的副边绕组。当变压器通过绕组W1吸收能量时,如图3 实线回路所示,此时绕组W1与绕组W3的电流iw1、iw3分别为
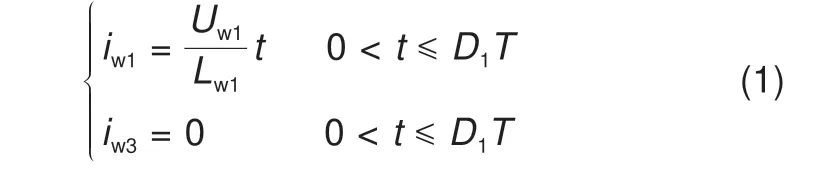
式中,Lw1为绕组W1的电感值;Uw1为模式Ⅰ绕组W1的电压。
t=D1T时,绕组W1电流获得最大值Iw1,max

式中,f为开关频率。
当变压器通过绕组W3释放能量时,如图3 虚线回路所示,此时电流iw1、iw3分别为

式中,Lw3为绕组W3的电感值;Uw3为模式Ⅰ绕组W3的电压。
电路工作在电流断续模式(DCM),因此当t=T时,iw3应小于0,即

根据绕组电感与绕组匝数比之间的关系可得

根据式(4)~(5)可得,模式Ⅰ控制信号PWM1+最大占空比D1为

由于模式Ⅱ与模式Ⅲ也工作在反激模式下,所以可以根据模式Ⅰ的推导过程得出和PWM3的最大占空比D2、D3为
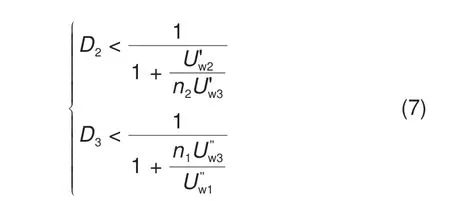
式中,U'w2、U'w3分别为模式Ⅱ下绕组W2与W3的电压;Uʹw1、Uʹ'w3分别为模式Ⅲ下绕组W1与W3的电压。
2.2 变压器参数
根据公式(2),可以得出变压器绕组W1的电感Lw1为

则绕组W3的电感Lw3为

同理可得,绕组W2的电感Lw2为

由于反激电压的存在,反激变换器原边MOS管关断时承受的最大电压等于最大输入电压与最大反激电压之和,反激电压又等于输出电压与绕组匝数比的乘积,所以绕组匝数比的大小直接影响原边MOS 管关断时需承受的最大电压的大小,因此变压器绕组匝数比不宜过大,最终选取变压器绕组匝数比为2∶1∶1。
3 仿真分析
搭建本文拓扑8节磷酸铁锂电池电路模型进行仿真分析,为防止变压器磁芯饱和,电路工作在DCM 模式下,同时为降低控制电路的复杂程度,占空比选取固定值。均衡参数设置如下:电池最大电压4.2 V,容量3.6 A·h,开关频率20 kHz,均衡电路启动阈值φ为0.005 V,模式判断阈值β为0.01 V,二极管导通压降0.6 V,绕组匝数比2∶1∶1,根据式(6)、(7)设置占空比D1、D2、D3分别为0.2、0.5、0.8,根据式(8)~(10)得出Lw1、Lw2、Lw3分别为336 μH、84 μH、84 μH。
为验证本文方案的有效性,在城市道路循环UDDS(urban dynamometer driving schedule)工况下进行仿真分析,该工况集充电、放电、静置于一体,更能符合动力电池组的实际工作环境,该工况电流波形如图9所示,图中负数表示放电。

图9 UDDS工况波形图Fig.9 UDDS working condition waveform
另外,为证明本文所提方案可以积极应对各种状况且具有较快的均衡速度,本文假设电池组分别处于三种状况进行分析讨论,三种状况如下:①电池组中各单体之间电压差很小;②电池组中少量电池电压很小,而其他电池电压相差很小;③电池组中少量电池电压很大,而其他电池电压相差很小,然后使电路分别工作在整体-单体、直接单体-单体、单体-整体和自适应交错控制下进行对比分析。
状况①:设置8 块电池电压分别为3.808 V、3.795 V、3.782 V、3.769 V、3.769 V、3.756 V、3.743 V、3.730 V,电池组中Umax=3.808 V、Uave=3.769 V、Umin=3.730 V,∆U1=0.039 V、∆U2=0.039 V。其仿真结果波形图如图10所示。
通过图10可以看出,当电池组处于状况①时,电路采用整体-单体和单体-整体类型虽然能实现电池组的有效均衡,但是均衡速度很慢;而电路工作在自适应交错控制与直接单体-单体类型,均衡速度较快,相对于整体-单体类型和单体-整体类型达到均衡的时间分别缩短了53.4%和57.4%。由于此种状况下∆U1与∆U2差值的绝对值小于判断阈值β,所以自适应交错控制策略使电路工作在模式Ⅱ(直接单体-单体)下,可以得出在该种状况下,均衡方案可以实现电池组的快速均衡。

图10 状况①不同工作状态电路均衡图Fig.10 Circuit equalization diagrams for different working states of case ①
状况②:设置8 块电池电压分别为3.808 V、3.795 V、3.782 V、3.782 V、3.769 V、3.769 V、3.756 V、3.651 V,电池组中Umax=3.808 V、Uave=3.764 V、Umin=3.651 V, ∆U1=0.044 V、 ∆U2=0.111 V。其仿真结果波形图如图11所示。

图11 状况②不同工作状态电路均衡图Fig.11 Circuit equalization diagrams for different working states of case ②
通过图11可以看出,在电池组处于状况②下,最差的均衡方式是工作在单体-整体类型下,如图11(c)所示,因为该状况下电池组最需要的是实现最低电压的升高,而单体-整体类型却只能实现最高电压的降低,不能直接实现最低电压的升高,所以造成均衡速度极其缓慢。最佳的均衡方式是工作在自适应交错控制下,均衡速度最快,如图11(d)所示,相对仅工作在整体-单体类型和直接单体-单体类型,达到均衡的时间分别缩短了39.8%和26.1%;在自适应交错控制下,电路首先工作在整体-单体类型下,先使电池组中最低电压快速上升,然后当电压上升到与电池组其他电压相差不大时,电路自动切换到直接单体-单体类型下,通过自适应交错控制使均衡电路根据电池组的状况自适应地调节均衡类型,充分发挥各个类型的特点,扬长避短,提高均衡速度。
状况③:设置8 块电池电压分别为3.821 V、3.756 V、3.743 V、3.743 V、3.730 V、3.716 V、3.716 V、3.703 V,电池组中Umax=3.821 V、Uave=3.741 V、Umin=3.703 V,∆U1=0.08 V、∆U2=0.038 V。其仿真结果波形图如图12所示。
通过图12 可以看出,当电池组出现少量电池电压极高的极端状况时,最佳的均衡方式是工作在自适应交错控制下,均衡速度快,如图12(d)所示,相对于仅工作在直接单体-单体和单体到整体类型下,达到均衡的时间分别缩短了17.3%和37.4%;而均衡效果最差的是工作在整体-单体类型下,因为该类型只能实现电池组最低电压的升高,而电池组处于该状况下最需要的是实现最高电压的下降,因此造成均衡速度极慢。在自适应交错控制下,电路首先工作在单体-整体类型下,先使电池组中最高电压快速下降,然后当电压下降到与电池组其他电压相差不大时,电路自动切换到直接单体-单体状态下,使电路始终工作在最佳的状态,最终实现电池组的快速有效均衡。

图12 状况③不同工作状态电路均衡图Fig.12 Circuit equalization diagrams for different working states of case ③
通过对电池组处于的三种不同状况进行仿真分析,可以看出本工作提出的均衡方案在各种状况下都可以有效地实现电池组的均衡,而且相对于工作在单一均衡类型下,采用自适应交错控制具有更快的均衡速度。
4 结论
为解决电池组不一致性问题,本文提出一种基于三绕组变压器的多均衡类型的主动均衡方案,该均衡方案具有以下特点:
(1)拓扑电路可以工作在整体-单体、直接单体-单体和单体-整体三种均衡类型下;仅使用一个三绕组变压器作为储能元件,相对于多绕组变压器拓扑具有更小的体积;同时该电路可以实现均衡能量在任意对象间的直接转移,均衡路径短;
(2)提出自适应交错控制策略,使均衡电路可以根据电池组所处状况的不同自适应地调节到最佳的均衡类型,充分发挥各均衡类型的特点,扬长避短,使电路时刻保持最佳的工作状态,实现电池组快速均衡。
最后对电池组分别处于不同的状况下进行仿真分析,仿真结果表明本工作所提方案可以有效地实现电池组的均衡,而且可以显著提高均衡速度。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
北京理工大学学报(2022年6期)2022-06-14
储能科学与技术(2022年2期)2022-02-19
煤(2022年2期)2022-02-17
防爆电机(2022年1期)2022-02-16
汽车维修与保养(2020年11期)2020-06-09
三联生活周刊(2017年48期)2017-11-25
课堂内外·教师版(2017年3期)2017-04-13
农机使用与维修(2014年1期)2014-09-23
职业·中旬(2009年12期)2009-06-01