
卤水水位传感器的原理与设计调试要点
2022-07-08 03:35范东宣
电子技术与软件工程 2022年8期
范东宣
(中国冶金地质总局青岛地质勘查院 山东省青岛市 266109)
地下卤水是一种液体矿产资源,可以用来提取溴素、晒制工业盐等。地下卤水是地质历史产物,是短期内不可再生的。在卤水矿的开采过程中,卤水水位会逐渐下降,同时矿区周围的地下水会向矿区汇聚,使卤水矿化度逐渐降低,最终导致矿区卤水枯竭或淡化成咸水,矿山寿命会因此终止。
为了科学地管理卤水矿产资源,指导企业对卤水矿产进行有序开采,我们需要实时掌握卤水矿山的动态储量、单位时间开采量、卤水水位和卤水矿化度等数据。目前,一般使用压力式水位传感器来测量卤水水位,使用电导率传感器来测量卤水电导率,并通过电导率来估算卤水矿化度。
传统压力式水位传感器是基于理想的应用条件设计的,只能在地下水是淡水的环境下使用,对于卤水和热水,测量结果会存在误差,本文将简单分析产生这种误差的原因。
本文将提出一种方法,用这种方法设计的水位传感器,避免了传统压力式水位传感器存在的测量误差,我们称这种水位传感器为卤水水位传感器。本文将阐明卤水水位传感器的工作原理,给出卤水水位传感器的设计要点和关键调试方法。
1 压力式水位传感器
传统压力式水位传感器通过测量水的压力来间接测量水位,其制成形式适合在不具备通视条件的地下水水位测量场合。
1.1 工作原理
压力式水位传感器使用了两个压力传感器S和S来进行绝对压力的测量。S用于测量大气压力,一般放置在水位传感器的隔离腔内,隔离腔通过空气导管和大气连通;S用于测量地下水和大气在其上产生的压力。
压力式水位传感器工作时要浸入到地下水里。图1 是压力式水位传感器工作原理示意图。
D表示地下水面到地平面的垂直距离,称为地下水埋深,是我们要测量的数据。
D是S到地平面的垂直距离,称为传感器埋深。当水位传感器安装到监测点后,D是一个定值。
测量数据D随着地下水水面深度的变化而变化。从图1 可以看出:
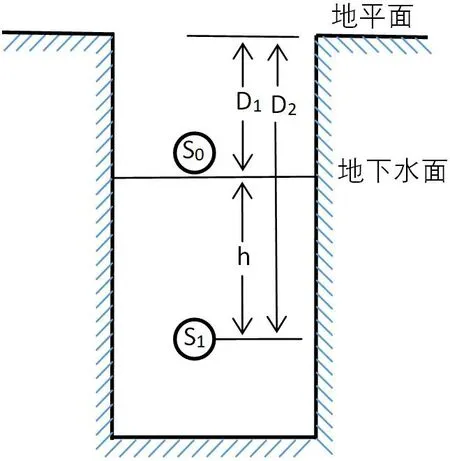
图1: 压力式水位传感器工作原理图

由于D是一个固定值,从式(1)可以看出,D和h成消长关系,为方便起见,以下的讨论我们将围绕h 展开。

图2: 卤水水位传感器工作原理图
根据流体静力学原理,S承受的压力是大气压力和地下水压力之和。如果S承受的压力用P表示,地下水在S上产生压力用P表示,S承受的大气压力用P表示,在的情况下:

1.2 压力测量误差
压力测量误差的大小取决于压力传感器本身。在压力传感器的时间寿命内,我们认为压力测量误差是在允许范围之内的,因此,除特别指出外,后续讨论将忽略压力测量误差。
1.3 关键配置参数
在式(4)中,ρ 是监测点的地下水密度,g 是监测点的重力加速度,在水位传感器安装到监测点之前,这两个值是未知的。在制造水位传感器时,为方便场内调测,这两个参数被设置成生产地的自来水密度值和重力加速度值,结束场内调测后,则使用进行合规性检验的第三方机构所在地的自来水密度和重力加速度来进行设定,以方便随时接受第三方机构的合规性检验。这种设定方式,决定了传统压力式水位传感器只能应用于淡水水位测量场合。
1.4 偏置误差
水位传感器的算法程序在根据(4)式解算水位数据时,参考的是ρ 和g 的配置值,而不是监测点的真实值,如果二者不一致,解算结果会存在误差,我们称这个误差为偏置误差。如果解算结果大于实际值,我们称解算结果存在正偏置误差,反之为负偏置误差。
水位的偏置误差与压力传感器的测量精度无关,而是和监测点有关。如果将水位传感器和监测点作为一个整体的监测系统看待,那么偏置误差实际上就是监测系统的系统误差的一部分。
1.4.1 重力加速度引起的偏置误差
重力加速度的大小与监测点的地理位置有关。一般情况下,纬度越高,重力加速度越大,海拔高度越高,重力加速度越小。根据式(4),设水位传感器安装地点的重力加速度为g,水位传感器配置的重力加速度值为g,在其它条件相同的情况下,解算结果的相对偏置误差为:

根据公开资料,我国32 个省会城市中,拉萨市的重力加速度值最小,为9.7799m/s;哈尔滨市的重力加速度值最大,为9.8066m/s。如果水位传感器的设置值是南京市的重力加速度值,为9.7949m/s,根据式(5),拉萨市相对南京市的水位解算结果的偏置误差e≈-0.15%,哈尔滨市相对南京市的水位解算结果的偏置误差e≈0.12%,南京市的解算结果则不存在偏置误差。
重力加速度引起的偏置误差比较小,如果对水位测量结果要求不优于1 级精度,是可以忽略这个误差的。
1.4.2 地下水密度值引起的偏置误差
地下水密度的大小与地下水的温度和矿化度等因素有关。
地下水的温度和地理位置、埋深、季节、地热等因素有关,根据水的密度的定义可知,当水温为4℃时其密度为1g/cm,当水温高于4℃时其密度则小于1g/cm,且温度越高,水的密度越小。
如果地下水存在矿化现象,我们称其为矿化水。水的矿化度越高,则密度值越大。
根据式(4),设监测点的地下水密度为ρ,水位传感器配置的水密度为ρ,在其它条件相同的情况下,水位解算结果的相对偏置误差为:

当矿化水的含盐量大于5%时,称为卤水。在15℃时,含盐量为5%的矿化水,其密度值为ρ≈1.0359g/cm,根据式(6),在ρ=1g/cm时,5%矿化水的相对偏置误差e≈3.59%。通常情况下,我们要求测量结果至少要达到1级精度(误差在±1%范围内),而在这个举例中,偏置误差已达3%以上。
综上所述,压力式水位传感器只能应用于常温的地下淡水水位测量,而对于地下热水和矿化水,则不能得到相对准确的测量结果。
2 卤水水位传感器工作原理
我们以传统压力式水位传感器为基础,进行二次设计,使水位传感器具备密度测量功能,我们称这种水位传感器为卤水水位传感器。卤水水位传感器在来测量矿化水水位和密度时,测量结果不存在1.4 所述的偏置误差。
如图(2),在传统压力式水位传感器的压力传感器S的下部再安装一个压力传感器S,其与S具有相同的类型和性能。压力传感器S与S之间的距离是固定的,在工作状态下,S与S的连线和重力加速度方向平行。
设:ρ 为监测点地下水密度,g 为监测点重力加速度,H 是两个传感器S和S的垂直距离,P2 为压力传感器S2的测量值,P是高度为H 的水柱产生的压力,则

式(7)中,H 是一个常数值,在生产传感器时,要对其进行严格地精度控制,使其加工误差足够小。
对于一个监测点,在一次测量中,我们可以认为其重力加速度和地下水密度是固定不变的,因此P=P-P是一个常数值,这个常数值只与监测点有关,与测量过程无关,与传感器埋深(水位)无关。
2.1 求解卤水密度
由式(7):

式(8)是卤水密度的解算模型,式中没有出现P,如果仅测量液体的密度,可以只使用两个压力传感器S和S来实现一个密度计的设计,而不需要使用大气压力传感器。
2.2 求解矿化度
通过密度解算矿化度,需要确切地知道二者之间地映射关系。地下水密度和矿化度之间的映射关系和矿化物质有关,对于海相成因的地下卤水,其矿化物质以金属卤化物为主,卤水密度和矿化度之间的映射关系是相对固定的,我们可以从公开资料上获得相关数据并建立其映射关系;对于湖相成因的地下水,其矿化物质成分复杂,可以在被监测区域采样,通过实验室手段获得相关数据,从而建立密度和矿化度的映射关系。
虽然可以由卤水水位传感器在本地实现由密度到矿化度解算,但更建议卤水水位传感器只完成密度测量,由上位机来实现解算,这样可以随时变更密度和矿化度的映射关系,使卤水水位传感器的具有共广泛适应性,且降低了对水位传感器的MCU 的要求,缩短测量时间。
2.3 求解水位
求解水位有两种方法:
方法一:使用传统压力式水位传感器的解算模型进行解算。通过式(8)解算出卤水密度ρ 后,再通过式(4)解算出水位值。这种方法有其不足之处,其一是解算时要用到监测点的重力加速度,如果这个值不是已知的,就需要使用一个近似值来代替,如1.4.1 所述,会引入偏置误差;其二是解算密度时可能存在舍入误差,这个误差会传导到最终结果,影响水位的解算精度。
方法二:由式(4)和式(8)得:

式(9)仅用三个压力观测值进行求解,可以完全弥补方法一的不足。
P、P和P的测量精度和H 的加工精度都是可控的,在工程实践中,我们可以通过选择不同精度级别的压力传感器来控制测量精度,以满足不同的应用要求。
3 卤水水位传感器的设计要点
3.1 标称量程hfs
传统压力式水位传感器的标称量程,是指被测量的水的密度为ρ=1g/cm时,最大可测量的水位。而矿化水的密度是不确定的,因此不能基于矿化水的密度来确定卤水水位传感器的量程。为了与传统压力式水位传感器的量程含义一致,我们将卤水水位传感器的标称量程也定义为测量密度为1g/cm的水时的最大可测量水位。
地下卤水的水位与卤水的开采和补给的平衡情况有关,存在着长期变化的趋势和周期性起伏的规律。当为某监测点选择卤水水位传感器时,需要参考监测点的历史水位数据,测算在观测时间段内水位的变化幅度,以确定卤水水位传感器的量程。设h为监测点卤水水位的变化幅度值,监测点的卤水最大密度为ρ,卤水水位传感器的最小量程为h,则
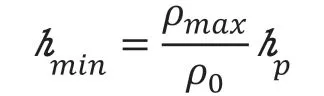
卤水水位传感器的标称量程h要略大于h,以防止出现超量程测量的情况。在制造卤水水位传感器时,我们可以人为地将其量程分为5m、10m、20m 等。在实际应用时,可根据矿区历史水位在观测周期内的变化幅度来灵活选择。
3.2 压力传感器量程Pfs
设P为物理大气压,则压力传感器S和S的量程为:

式(10)是压力传感器的量程估算式。其中,水的密度ρ=1g/cm,重力加速度g=9.8cm/s,P=1atm。
在生产条件下,要选择量程略大于P的压力传感器来使用。
3.3 传感器压力分辨率
我们将压力传感器能够感知和检测到的最小压力增量称为压力传感器的压力分辨率P,其对应水柱高度称为水位分辨率h。
传统压力式水位传感器采用集成化的扩散硅压力传感器作为敏感器件,这种传感器使用金属膜片感应压力,使用硅油传导压力,使用扩散硅压变电阻将压力转换为电信号,由模数转换器进行量化采样。
通过优化采样电路和数据处理算法,扩散硅压力传感器可以实现P≤9.8 帕的分辨率,对应h=1mm。在水位传感器进行场内调测时,要保证水位传感器读数在1mm 位置上是稳定的。
由于扩散硅压力传感器的压力要通过中间介质进行感应和传导,影响了传感器的灵敏度,从而影响了传感器的压力分辨能力。如果要求更小的分辨率,需要使用具有更高灵敏度和测量精度的压力传感器。
3.4 压力传感器距离H
从式(8)可以看出,卤水密度的测量精度取决于P和P两个量的观测精度。设P和P的观测误差分别为e和e,卤水密度的测量误差为e,根据式(8):

从式(11)可以看出,|e|与H 成反比,H 越大,|e|越小。H 值大,说明卤水水位传感器的几何尺寸大,我们可以通过增大H 值来提高测量精度,但在实际应用中,考虑到安装条件等因素的限制,不可能无限制地增大H 值,因此,如果希望有更高的测量精度,应该使用更高精度的压力传感器。
3.5 低功耗设计
为了延长水位传感器电池的使用寿命,需要采取多种措施以降低功耗,如选择低功耗器件、微电流待机、电路功能单元的可控投入与撤出、并行化处理、提高采样频率等。
3.6 多次采样
在一个测量周期内,监测点的地下水密度和水位是不变的,因此,可以认为输入模数转换器的是一个静态信号。
根据采样原理,在不考虑误差的情况下,当对静态信号进行重复采样时,采样结果是不变的。我们可以利用这个原理,用多次采样值的算术平均值作为采样结果,这样可以降低噪声干扰,增加监测系统的鲁棒性和结果的稳定性。
3.7 最佳采样频率
卤水水位传感器比传统压力式水位传感器多使用一个压力传感器,在一个测量周期内,需要更多的时间完成对压力的采样。
虽然对静态信号的采样不须要考虑采样频率问题,但在进行多次采样时,过低的采样频率会增加测量时间而增加功耗,因此我们要尽量在不损失测量精度的前提下提高采样频率。采样频率与A/D 转换的位数有关,位数越大则采样频率越低,位数越小则采样频率越高但可能影响采样精度。
在电路设计时,通常我们会选用转换位数足够多的模数转换控制器(ADC),再根据不同的量程和精度要求,来确定具体的满量程模数转换位数,使ADC 在这个位数下进行A/D 转换。
设W为满量程压力值的模数转换位数,其最低有效位(LSB)所对应的压力值为P,为了对压力分辨率级别的压力进行可靠采样,我们要确保P
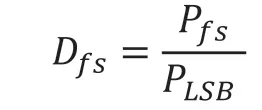
求得D后,我们再利用式
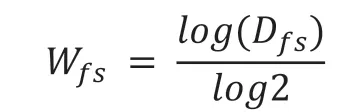
求得满量程模数转换位数W,并对W向上取整。
工程中一般采用Σ-Δ 类型的ADC 实现压力采样,这类ADC 有比较多的A/D 转换位数(如24 位),其关键参数“结果更新速率(Output Update Rate)”是影响采样频率的主要因素之一,ADC 有专门的配置寄存器来实现对这个参数的控制,我们可以根据W等参数对其进行配置,以得到最佳的采样频率。
4 卤水水位传感器的调试要点
4.1 压力循环调试
所谓压力循环,就是从某个压力开始,逐渐增加压力到压力传感器量程后,再逐渐减小到起始值。
压力循环调试是在生产水位传感器期间进行的场内调试,一般借助空气压力发生器来实现。我们将待测卤水水位传感器放置在空气压力发生器的密闭实验空间内,通过调节密闭空间内的空气压力来模拟水位的变化。
设压力P 对应的数字量化值为D,我们希望二者之间呈理想的线性映射关系,在采样电路设计完成后,这个关系就是确定的,我们用F表示这个关系,即D=F(P)。对于压力P 的真实采样值D,二者之间一般是非线性关系。压力循环调试的目的之一,就是矫正P 和D之间的映射关系,使其和F一致。
我们可以将压力量程分为若干区间,在每个区间内,我们认为D和P 呈线性关系,用F表示,即D=F(P) 。我们对F进行矫正,使F和F在同一压力区间内是线性一致的。可以适当调整区间数量,使测量精度最优且区间数量最少。
4.2 压差一致性调试
如1.1 所述,压差P=P-P是一个与密度有关的量,在密度已知时,P是一个不变量。如3.4 所述,压差P关系到密度的测量精度和结果的稳定性,压差一致性调试的目的,是保证在密度不变的条件下,在压力传感器的量程范围内,P是一致的。
我们将卤水水位传感器垂直悬挂在已知密度的食盐水中进行压力循环测试,压力的变化范围介于0.5atm 和压力传感器的量程之间,以P值作为循环起止判据。我们可以用不同密度的食盐水进行多次压力循环调试,以矫正密度不同时可能存在的误差。
如4.1 所述,我们将压力传感器的量程分为若干区间,在每一区间的中间点上测量 P和P,用式(7)进行验证,在保持P不变的情况下,矫正P,使式P=P-P在整个量程范围内是一致的。矫正参数保存在水位传感器内部静态存储器内,供进行密度或水位解算的算法程序调用。
由于式(7)中要用到重力加速度值,我们要保证调测现场的重力加速度值已知的。
5 总结
由于解算水位时使用的水密度值与监测点的真实值不一致,用传统压力式水位传感器测量卤水水位时,会出现较大的测量误差。根据本文给出的方法和原理制成的卤水水位传感器,其水位解算模型不依赖于监测点的卤水密度值,其测量结果不存在偏置误差。卤水水位传感器还可以用来测量卤水密度和矿化度。如果被测量液体的化学特性(如腐蚀性)或物理特性(如温度)满足使用条件,那么卤水水位传感器可以用来测量任何液体的液位和密度。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
饮食科学(2019年5期)2019-06-03
石油化工自动化(2018年5期)2018-11-14
北京航空航天大学学报(2016年6期)2016-11-16
通信电源技术(2016年1期)2016-04-16
当代化工研究(2016年5期)2016-03-20
新疆地质(2016年4期)2016-02-28
