地形跟随飞行中光轴搜索策略
2022-07-08 08:04黄鹏程唐超颖魏东辉
探测与控制学报 2022年3期
黄鹏程,王 彪,唐超颖,魏东辉
(1.南京航空航天大学自动化学院,江苏 南京 211106;2.复杂系统控制与智能协同技术重点实验室,北京 100074)
0 引言
地形跟随(terrain following,TF)是现代飞行器(战斗攻击机、导弹、无人机等)超低空突防飞行的一种主要技术,有效利用了地杂波和地形起伏对敌方防御系统造成的干扰和死区,提高了飞行器的攻击能力和生存能力[1]。在地形跟随中,利用视觉传感器能够获取前方地形场景深度等信息[2],通过实时在线规划[3-4],有效降低对导航精度、地图保障精度的需求,但是会增加计算复杂度;搭配传统的地形跟随导引律使用[5],计算量小,实时性好但是会损失一些地形贴合度。视觉传感器还能用于计算飞行器运动信息[6],通过估算高度信息,将地形跟随转化为高度控制问题[7-8],但存在一定的滞后并不适合高速飞行器。通过对前视相机获取场景深度并搭配导引律来实现高速飞行器的地形跟随方案进行分析后发现,前视相机的光轴大部分与机体纵轴重合或者利用云台保持在惯性空间某一方向不变;然而为安全起见,地形跟随飞行中使用的前视相机探测距离很远,焦距很长,导致视场角很小,在跟随起伏较大的地形时,非常容易出现视野丢失,即当前时刻相机视野内无可用地形数据的问题,尤其是在飞越山峰最高点时,进而导致地形跟随任务中断。
针对上述视野丢失问题,本文提出光轴搜索策略,通过分析导引特征点与飞行器的相对位置,给出扫描指令,保证小视场角相机成像结果始终存在可用于导引的特征点。
1 适应角法地形跟随
适应角法是一种经典的地形跟随方法,可生成航迹角指令或法向过载指令,结合航迹角或法向过载控制,实现对飞行航迹的间接控制,已经在F-111、B-1、F16C/D、F15E等几种典型机种上实际应用[1]。固定翼飞行器在飞行状态下,基本角度关系如图1所示,θ=ϑ-α,其中θ为航迹角,ϑ是俯仰角,α是迎角。某时刻t,地形探测传感器探测某一障碍点/地形,获得该点与飞行器的斜距为R,在视野中的视线角为λ,视觉传感器光轴与机体轴OXb重合。
图1 基本角度关系Fig.1 Basic angle relationship
考虑飞行器在实际飞行过程中的安全需求,假设预设安全高度为H0,则飞行器各时刻的期望航迹角指令如下:
θFL=ϑ+λ+H0/R。
(1)
传统角指令法可以导引飞行器翻越障碍或者山峰,保证飞行器不发生碰撞,却未能充分利用地形起伏飞行。为了解决这个问题,研究人员引入了一个抑制函数Fs和一个常值增益系数Kθ,得到新的适应角指令
θFL=Kθ(ϑ+λ+H0/R-Fs)。
(2)
在保证不发生碰撞的前提下,障碍物/地形与飞行器的相对距离R对Fs的影响最为明显。R越大,选择较大的Fs,减少航迹倾斜角,推迟拉起,随着R减小,飞行器逐渐靠近障碍物/地形,Fs的作用逐渐降低,飞行器需要快速拉起以保证翻越障碍点。根据经验和数学仿真,抑制函数Fs和斜距R可以近似为一个三段线性函数关系
(3)
在文献[1]中,根据参考模型的拟合模型,配合飞行器机动能力限制逆推得到抑制函数与斜距R的曲线,并近似拟合得到三段式线性参数。在此基础上,文献[9—10]根据经验直接给出了三段式函数系数。
增益Kθ使飞行器以高机动拉起,飞行器承受正过载的能力强于承受负过载的能力,它的参数调整取决于当前的飞行状态。一般情况下为:
(4)
式(4)中,K值为大于1的常数(通常取1.5)[1]。
2 光轴搜索策略
在以往的文献中对于传感器与飞行器的连接方式并无明确的讨论,大部分是将视觉传感器光轴与机体纵轴重合或者利用云台保持在惯性空间某一方向不变。本文在对几种传统的连接方式进行仿真测试后,发现在视场角较小的情况下,跟随效果并不理想且容易出现视野内无地形的现象。针对现有连接方式的缺点,提出光轴搜索策略。
2.1 传统连接方式
选取三种主流的连接方式:1) 将光轴与飞行器纵轴固连;2) 光轴与速度矢量方向重合;3) 光轴在惯性空间中保持水平。搭建仿真系统,对三种方式在相同参数和地形条件下的跟随结果进行仿真分析。从图2与图3中飞行器实际跟踪航迹可以看到在跟踪过程中出现了视野内无地形点的情况,即图中小框内放大的位置,飞行器无法通过视觉传感器数据计算导引指令,而是通过给定一个预设向下的航迹角指令使飞行器继续飞行,但这不是本文的研究内容,这里不再赘述。
在继续飞行的过程中视野内又重新出现地形,通过视觉传感器数据计算得到向上的导引指令,视野内地形点信息又会丢失,这就是图中航迹出现多段波浪式向前的原因,也是将光轴与机体纵轴和飞行方向重合的缺陷。实际中,地形跟随飞行任务在第一次地形点丢失时就已停止。
视觉传感器通过稳定平台与飞行器连接,使光轴在惯性空间内始终保持水平向前,仿真结果如图4所示,在过峰之后常常会出现视野丢失的情况,即图中小框的情况。相比于固连机体纵轴,在过峰后跟踪低谷的效果差,整体航迹相对平稳,有一个较大的滞后且通过抑制函数实现的下滑过程并不安全,在图中局部放大的部分可以看到飞行器在过峰下滑的过程中会与地形发生碰撞,而在越峰的时候由于无法提前看到峰点,当翻越坡度比较大的山峰时,几乎要与地形发生碰撞,无法保障安全。
图2 光轴与飞行速度方向重合Fig.2 Optical axis coincides with the velocity direction

图3 光轴与机体纵轴重合Fig.3 Optical axis coincides with longitudinal body axis
图4 光轴在惯性系中保持水平Fig.4 Optical axis keep horizontal in inertial frame
2.2 搜索策略
以往的连接方式在爬坡、过峰、长低谷等情景下的跟随效果并不理想,本文对整体跟随过程划分为不同阶段(见图5)进行分析,确定不同情形下的搜索策略,在分析的过程中略去无需搜索的情况,首先根据前文中对抑制函数的分析,在R
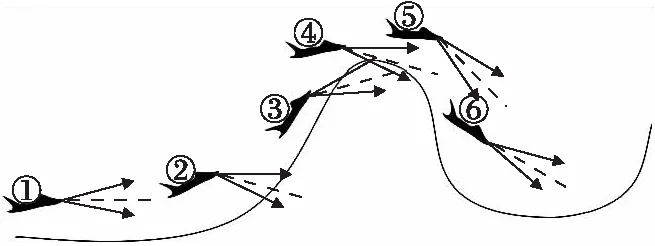
图5 飞行过程中指向角变化情况Fig.5 Change of pointing angle during flight
情形1:飞行器与目标点之间的斜距R>R3,只依靠抑制函数可能无法使飞行器完全贴近地形,由于视场角的限制,飞行器与目标点之间地形信息很少。为了得到更多的前向地形信息,我们设计光轴在这种情况下转动,此时的目标不再是跟踪目标点的位置,而是保证当前时刻选择的目标点与飞行器之间的斜距小于R3。
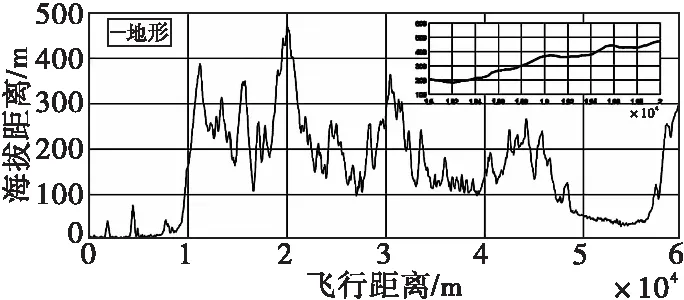
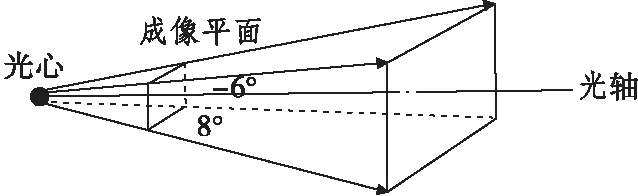
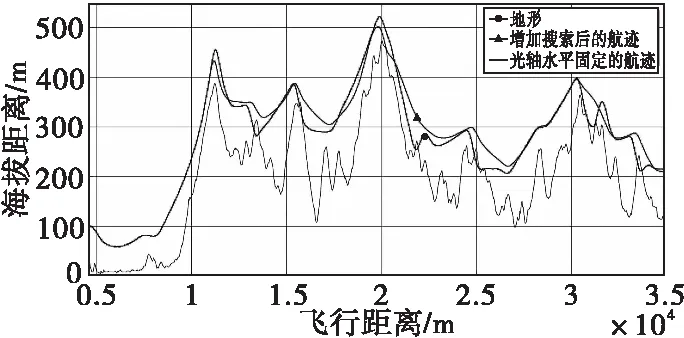
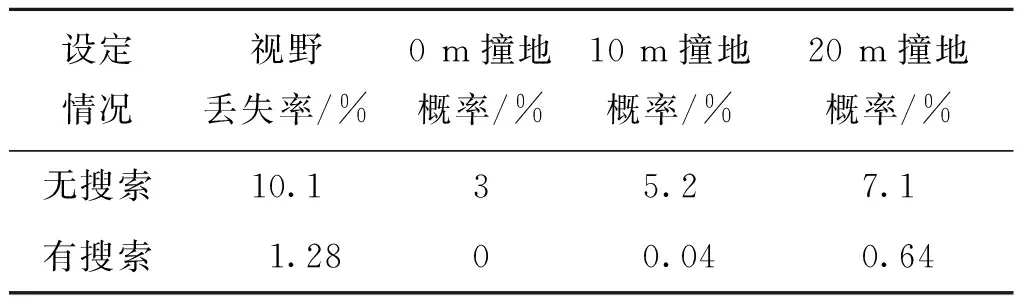
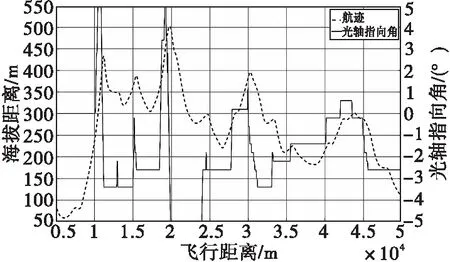
情形2:飞行器与目标点之间的斜距R 情形3:飞行器与目标点之间的斜距R与设定安全高度H0比较接近,飞行器接近峰顶,且峰顶已呈现在视野中,此时转动光轴是为了保证在越峰的过程中能够在视野中保留山峰信息,确保在越峰后视野内依然有前方地形,避免视野丢失。定义启动搜索的斜距值为一个由速度V,转动角速率ω,安全高度H0和相机视场角限制FOV共同决定的值Rmin=f(H0,V,ω,FOV) 情形4:飞行器与目标点之间的斜距不再是主要的影响因素,此时需要转动光轴是为了保证目标点位于图像的合适区域,避免过峰后的视野丢失。 情形5、6:过峰后根据此时目标点与飞行器之间的斜距R,参照情形1和情形2处理。特别需要指出的是,情形5是唯一可能出现探测范围内无地形的情况,按照情形1处理。 根据上述分析,设定[R1/2,R3]为一个比较合理的斜距区间,获取当前时刻图像,选择特征点并计算导引指令,当特征点与飞行器的斜距位于这个区间时保持光轴角度不变;当斜距R>R3时,光轴向下转动;当Rmin 从算法流程分析,本文提出的搜索策略在传统适应角法得到目标点斜距和角度的基础上,增加了条件判断,但是依旧保持了适应角法的复杂度。 图6 光轴搜索策略Fig.6 Search strategy of optical axis 为了验证本文提出的光轴搜索策略是否有效,使用F16飞行器模型及真实地形数据搭建数学仿真平台。由于计算斜距和视线角的模块算法较为复杂,本文主要介绍光轴搜索策略的思想,不在这里对视觉模块作展开讨论。 根据地形跟随飞行的特点和仿真要求,假设飞行航向是不变的,于是飞行区域假定为沿飞行方向的一个纵向剖面内,飞行器下方是一个二维地形曲线。因此,选择能够反映地表特征的地形剖面曲线进行仿真[11]。 本次仿真使用的地形数据来自于地理空间数据云,截取河北省张家口市的山区地形,完成DEM高程数据切割并下载为.tif格式文件。通过预先确定飞行器的起飞位置和着陆点,Bresenham快速画线算法,插值获取航线上各点高度值,最终得到二维剖面地形如图7,图中小图将地形局部按高度同比例展开,以便直观观察地形变化剧烈程度。分析地形数据得到高程差值470 m,标准差值107.2 m,根据文献[12]的分类标准,属于山地起伏。 图7 60 km航程二维地形剖面Fig.7 2D terrain profile with 60 km range 本次仿真设定相机的视场角FOV为水平方向±4°,垂直方向±3°,如图8所示的锥体。假定最大探测距离为前方5 km,当5 km范围内没有任何地形点时即为视野丢失。飞行器的速度V=200 m/s,云台转速ω=4(°)/s,转动限制φlim=±10°,期望高度H0=50 m,扫描基准Rmin=100 m,航迹角限制γ∈[-10°,20°],法向过载限制n∈[-2,3],根据经验及仿真调整得到三段式函数的斜距分段为R1=1 200,R2=2 000,R3=3 500,系数C1=3×10-5,C2=3.5×10-4。 图8 视场角示意图Fig.8 Schematic diagram of field of view 选取同样的适应角参数和相同的地形片段,选择前文提及的三种固定方式中跟随效果相对更出色的方式,即光轴在惯性空间中保持水平的方式与光轴通过云台在初始状态保持水平并应用光轴搜索策略的情况进行对比,跟随结果如图9所示。 通过撞地概率指标和视野丢失率对跟随结果进行评价。根据飞行器与地面的实际离地高度Δh低于设定安全离地高度hs即判定为一次撞地,通过统计全程撞地次数得到不同设定安全高度下的撞地概率,同时统计全过程中视野范围内无地形的情况得到表1。可以看出,应用本文提出的光轴搜索策略后能够有效减少视野丢失的情况,且能有效避免撞地。 图9 应用光轴搜索前后跟随结果对比Fig.9 Comparison of results applying optical axis search strategy 表1 应用光轴搜索策略前后的结果对比Tab.1 Comparison of results applying optical axis search strategy 将跟随过程中光轴指向角随时间的变化曲线与航迹绘制得到图10可以直观地发现在上坡的过程中光轴指向角逐渐增大,在过峰前指向角逐步减小,符合本文提出的指向策略。 图10 光轴指向角变化情况Fig.10 Change of pointing angle of optical axis 本文提出光轴搜索策略,采用基于情景判别的分段适配处理方法,通过分析导引特征点与飞行器的相对位置,在不改变适应角法计算复杂度的情况下给出扫描指令,并在使用适应角法作为导引律的地形跟随系统中对该方案进行了仿真验证。结果表明,使用本策略后能够获得更丰富的地形信息,避免地形点视野丢失的问题,达到更好的地形跟踪效果。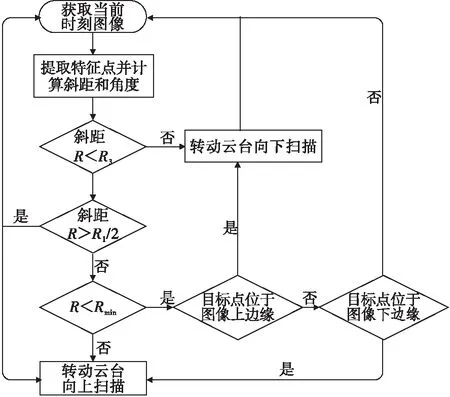
3 仿真验证
3.1 地形数据
3.2 仿真参数
3.3 仿真结果
4 结论
猜你喜欢
航空学报(2022年9期)2022-10-14北京航空航天大学学报(2022年7期)2022-08-06舰船科学技术(2022年11期)2022-07-15舰船科学技术(2022年10期)2022-06-17凤凰动漫(军事大王)(2022年1期)2022-04-19北京航空航天大学学报(2022年2期)2022-03-08学校教育研究(2020年11期)2020-06-08航空科学技术(2019年2期)2019-09-10环球时报(2018-11-30)2018-11-30小朋友·快乐手工(2015年5期)2015-06-06