基于时域旋转不变技术的目标方位估计方法
2022-07-08 08:04邱岚
探测与控制学报 2022年3期
邱 岚
(江西科技学院信息工程学院,江西 南昌 330098 )
0 引言
在阵列信号处理中,已有许多学者对基于目标信号的被动检测和方位估计问题进行了深入研究,并取得了一定的研究成果。近年来,基于特征结构的子空间类方法因具有较高的方位分辨能力和估计精度得到了快速发展,并在声纳、雷达和通讯等领域得到了广泛应用[1-2]。
在子空间类方法中,基于旋转不变性的参数估计技术(estimation of signal parameters via rotational invariance technique,ESPRIT),其可充分利用信号子空间的旋转不变特性进行方位估计,不需要进行空间谱搜索即可得到目标方位估计值,进而降低了计算复杂度和存储需求,已被视为一种高效方位估计技术应用于声纳、雷达和通讯等领域[3-4]。
为了提升ESPRIT技术在目标方位估计中的宽容性,文献[5-14]分别在非高斯性目标信号、相干目标信号、阵列随机性、多目标方位估计方面提出相应改善方法。如文献[5]提出了一种基于累积量的ESPRIT型盲波束形成算法,用累积量矩阵取代自相关矩阵完成信号空间的重建,实现了对非高斯信号源方位估计。文献[6-8]分别提出了虚拟阵列平移法和酉变换方法解相干信号的ESPRIT算法,实现了对相干信号源高精度方位估计。文献[9-12]分别提出了基于扩展ESPRIT的随机阵列高效目标方位估计算法和最优子阵划分ESPRIT的任意线阵高精度DOA估计算法,分别通过阵列内插技术和子阵阵元优化选取技术,提高了ESPRIT技术对任意阵列的波达方向估计性能。文献[13-14]提出了波束-多普勒酉 ESPRIT多目标方位估计,采用中心共轭对称傅里叶变换矩阵将数据变换至波束-多普勒域提高了多目标方位估计精度。
以上方法虽然能在不同情况下提升ESPRIT技术在目标方位估计中的性能,但均是基于频域角度出发实现,时频变换所需采样点数和协方差矩阵估计所需快拍数需要折中处理,在低信噪比、小快拍数的情况下,协方差矩阵估计误差变大甚至可能失效。本文对此问题,提出基于时域旋转不变技术的目标方位估计方法(本文称之为TD-ESPRIT方法)。
1 ESPRIT方法
图1为M元等间距阵列(d为相邻阵元间距)。
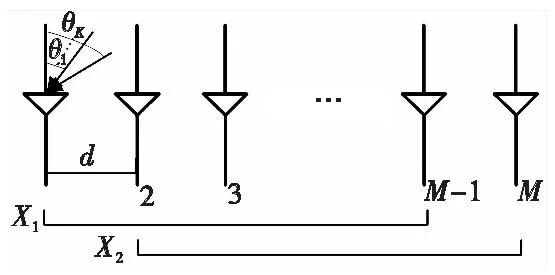
图1 阵列接收信号Fig.1 Schematic diagram of array received signal
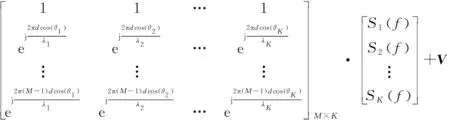
对于K个目标信号源S=[S1(f),S2(f),…,SK(f)]T,[·]T为矩阵转置,则阵列接收数据号可表示为:
(1)
式(1)中,A=[a(θ1),a(θ2),…,a(θK)],a(θk)=

根据图1所示子阵划分方法,两个子阵列接收数据X1和X2可表示为:
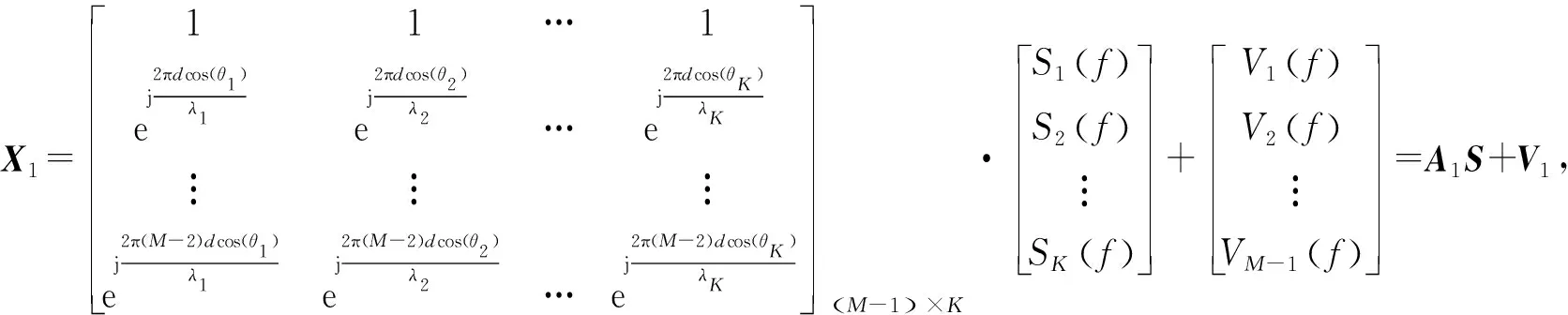
(2)
(3)
由上述数学模型可知,目标方位角信息已包含在φ中,只要得到φ值,即可实现对目标方位估计。
ESPRIT方法是在噪声(包括干扰)与信号不相关的假设下,首先对阵列接收数据的协方差矩阵Rx=E[XXH]做特征分解得到信号子空间Us和噪声子空间Uv,然后利用信号子空间的旋转不变特性获得目标方位估计值,E[·]为期望函数。
由于目标信号特征向量所张成的信号子空间与导向向量张成的信号子空间是等价的,即span{Us}=span{A},因此存在唯一的非奇异矩阵T,使得
Us=AT,
(4)
即
(5)
式(5)中,Us1为Us前M-1行数据,Us2为Us后M-1行数据。
对式(5)进行处理,可得
Us2=A2T=Us1Τ-1φT=Us1Ψ,
(6)
式(6)中,Ψ=Τ-1φT,则对角阵φ的元素即为Ψ的特征值。
在理想情况下,式(6)存在唯一解,采用最小二乘求解方法,可得
Ψ=(Us1HUs1)-1Us1HUs2。
(7)
对式(7)进行特征分解,可得到其特征值,即为对角矩阵φ的元素。
φ=TΨΤ-1。
(8)

(9)
根据上述所述过程, ESPRIT方法实现流程如图(2)所示。
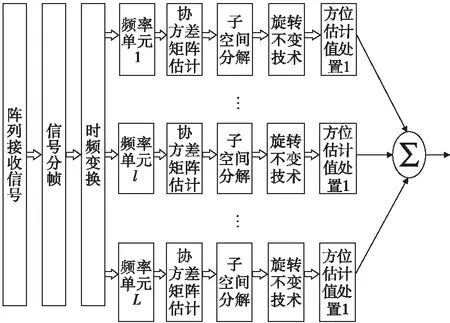
图2 ESPRIT方法实现流程图Fig.2 Implementation flow chart of ESPRIT

(10)
式(10)中,I为总帧数(也为协方差矩阵估计所需快拍次数),一般取大于阵列所含阵元数的2倍。
从ESPRIT方法实现过程可知,实现ESPRIT方法需要满足:1)Rx中不应含有信号与噪声相关成分的贡献;2) 数学上要求Rx满秩。
然而,在一次处理数据采样点总数T0一定时,如式(11)所示,在频域进行协方差矩阵估计时,存在时频变换所需采样点数和协方差矩阵估计所需快拍数需要折中处理问题,即精确的频域数据需要多个时域采样点数据进行时频变换才能得到,而准确的协方差矩阵估计需要一定快拍次数I。在低信噪比、小快拍数的情况下,如果信号频域数据精度不够或协方差矩阵估计所需快拍数不够,则可能引起协方差矩阵估计误差变大甚至可能失效。
T0=I×ΔT/2,
(11)
式(11)中,ΔT为一次时频变换所用采样点数(采样点数按0.5倍交叠使用)。
2 TD-ESPRIT方法
2.1 理论分析
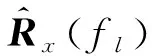
如果能够直接采用时域数据进行ESPRIT技术应用,则可将一次时频变换所需采样点数转换为协方差矩阵估计快拍数,相比在频域实现,可避免时频变换所需采样点数和协方差矩阵估计所需快拍数需要折中处理问题,进而做到一次快拍即可获得具有信号与噪声不相关和满秩条件的协方差矩阵,进而提升ESPRIT方法在目标方位估计中的宽容性。TD-ESPRIT方法基本思路为:通过两次快速傅里叶变换将各阵元时域实数据转换为时域解析数据,在时域将阵列接收数据按相移形式表示,然后利用特征分解思想求取信号子空间,并利用旋转不变技术获得目标方位估计值。该思想实际为用时域解析数据实现ESPRIT方法的过程,图3给出了实现上述思想的示意图。
根据图1所示,第m号阵元接收的实数信号可表示为:

(12)
式(12)中,τm(θk)=(m-1)dcos (θk)/c,1≤m≤M为第k个目标信号到达第m号阵元相对于第1阵元的时间延迟,只与目标信号相对阵列所处的方位θk有关。
图3 TD-ESPRIT 方法实现过程Fig.3 Implementation process of TD-ESPRIT
由快速傅里叶变换的性质可知,可将式(12)所示表达写为频域离散化形式,即

(13)
由式(13)所示的频域形式可知,对于窄带数据,阵列接收数据相移等价于阵列接收数时延,如果能够在时域将阵列时延形式表示为相移形式,即可采用ESPRIT技术实现对目标方位估计。
对式(13)做如下处理:
(14)
式(14)中,fL,fH分别为处理数据所需频带上下限。
(15)

(16)
(17)
按ESPRIT方法对信号子空间采用最小二乘求解方法,可得
(18)
对式(17)进行特征分解,可得到其特征值,即为对角矩阵φ的元素。
2.2 实现流程
根据上面分析可知,基于TD-ESPRIT方法的目标方位估计方法可分为如下步骤实现:
1) 对M元阵列采集的时域离散数据xm(n)进行时域复解析变换处理;
2) 按窄带处理方式,在处理频带上,对阵元时域复解析数据进行窄带滤波分解;
4) 按式(17)对信号子空间进行处理,进而获得TD-ESPRIT方法对目标方位估计值;
5) 改变处理频带,重复步骤2)-步骤4),可获得TD-ESPRIT方法在不同处理频带上目标方位估计值;
6) 按直方图形式对各处理频带所得目标方位估计值进行累加处理,可得最终目标方位估计值。
3 数据处理分析
3.1 数值仿真分析
为了进一步验证TD-ESPRIT方法的可行性,进行如下数值仿真分析。
1) 单目标情况
仿真条件:接收阵为8阵元的等间隔水平直线阵,相邻阵元间距为0.25 m,目标信号为2 900~3 100 Hz窄带高斯白噪声,背景噪声为同样带宽的加性高斯白噪声,信号与背景噪声信噪比为SNR,模拟信号输入方向为100°。系统采样率为20 kHz,一次处理长度为1 s,TD-ESPRIT方法由一次快拍实现,ESPRIT方法所分频率单元数为L=200,每一频率单元由20次快拍(每一次快拍包含2 000个采样样本)实现。
图4为SNR=-18~4 dB情况下,由200次独立统计所得常规波束形成方法(文中简称为CBF方法)、ESPRIT方法和TD-ESPRIT方法的检测目标成功概率。图5为SNR=-18~4 dB情况下,由CBF方法、ESPRIT方法和TD-ESPRIT方法所得目标方位估计均方根误差(root Mean squared error,RMSE),其具体公式为:

(19)
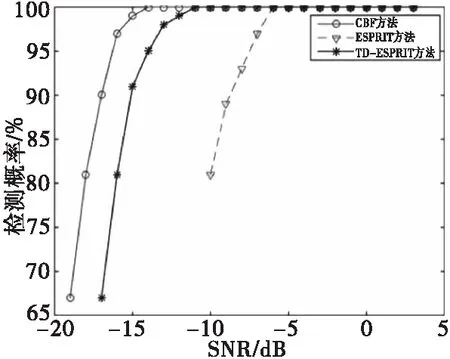
图4 3种方法检测目标成功率Fig.4 Target detection success rate of three methods
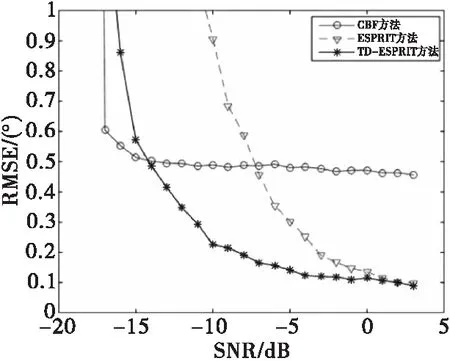
图5 3种方法所得方位估计均方根误差Fig.5 Root mean square error of azimuth estimationof three methods
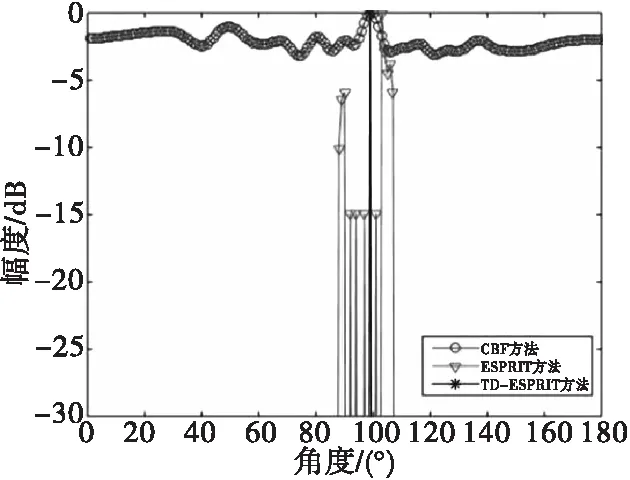
图6 SNR=-16 dB,3种方法合成空间谱Fig.6 SNR=-16dB,Synthetic spatial spectrum of three methods
由图4仿真结果可知,在检测概率大于80%时,CBF方法对应最低输入信噪比SNR=-18 dB,TD-ESPRIT方法对应最低输入信噪比SNR=-16 dB,ESPRIT方法对应最低输入信噪比SNR=-11 dB,所以,对于检测概率大于80%的同一检测概率情况,虽然TD-ESPRIT方法相比CBF方法对最低输入信噪比要求高了2 dB,但相比ESPRIT方法,TD-ESPRIT方法对最低输入信噪比要求降低了5 dB;图6结果也进一步表明,在SNR=-16 dB时,ESPRIT方法已无法实现对目标有效检测,而CBF方法和TD-ESPRIT方法还可有效对目标实现有效检测,且相比CBF方法,TD-ESPRIT方法合成的空间谱只在目标方位处存在谱线,便于提取。另外,由图5可知,在RMSE <0.5°时,即在输入信噪比SNR≥-14 dB时, 相比CBF方法和ESPRIT方法,TD-ESPRIT方法对目标方位估计精度较高。该结果进一步表明了在对检测概率和目标方位估计精度有较高要求时,TD-ESPRIT方法具有一定优势。
2) 双目标情况
对双目标进行仿真验证,仿真中线阵条件、系统采样率、数据处理情况与单目标情况一致,双目标信号为等强度信号,信号均为2 900~3 100 Hz窄带高斯白噪声,相对线阵方位角分别为96°和100°。图7为SNR=-6 dB情况下,分别由CBF方法、ESPRIT方法和TD-ESPRIT方法所得方位历程图。
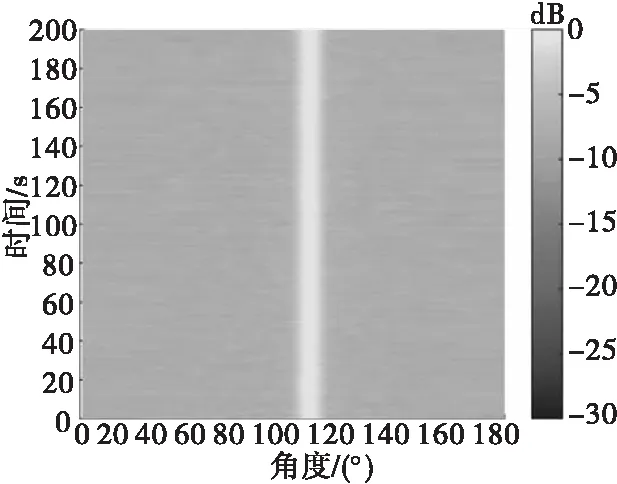
图7 CBF方法所得方位历程图Fig.7 Azimuth history of CBF
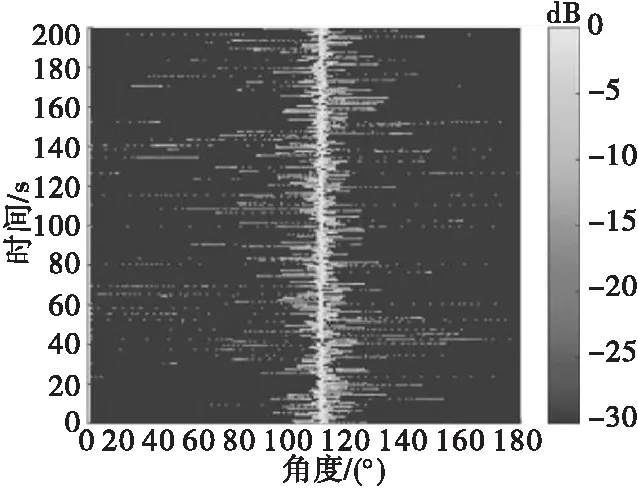
图8 ESPRIT方法所得方位历程图Fig.8 Azimuth history of ESPRIT
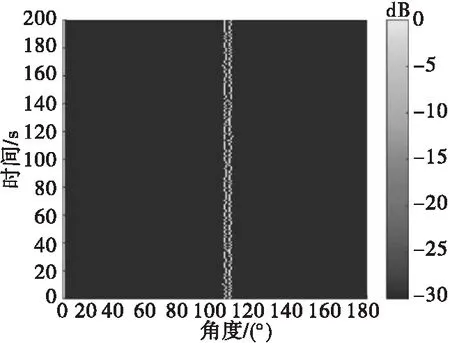
图9 TD-ESPRIT方法所得方位历程图Fig.9 Azimuth history of TD-ESPRIT
由图7—图9结果可知,对于相邻两个目标信号,在线阵孔径有限和数据信噪比较低情况下,TD-ESPRIT方法未损失对两目标有效分辨,而CBF方法和ESPRIT方法已无法实现对两目标有效分辨,该结果进一步验证了TD-ESPRIT方法的可行性。
另外,由式(18)处理过程可知,目标方位值是通过求解对角矩阵φ的元素所得,只要目标数目不大于对角矩阵φ的元素数(即阵元数减1),该方法同样有效。受篇幅限制,在此不再进行更多目标数目情况的仿真分析说明。
3) 计算复杂度
在该数值仿真数据处理中,TD-ESPRIT方法与ESPRIT方法计算量比较是在Intel(R) Core(TM) i7-7500U CPU@2.70 GHz 2.90 GHz的计算机上利用Matlab2014a的CPU TIME测出的。完成1次方位估计ESPRIT方法所需时间为0.323 s,TD-ESPRIT方法所需时间为0.035 s。该实验采样率较高,由于TD-ESPRIT方法只对一次快拍数据进行处理,其计算量小于ESPRIT方法。
3.2 实测数据处理分析
为进一步考核TD-ESPRIT方法性能,下面分别利用CBF方法、ESPRIT方法和TD-ESPRIT方法对某次试验数据进行处理并作对比。试验中,接收阵为等间距均匀分布的8阵元水平直线阵,阵元间距为0.25 m;处理数据带宽为2 900~3 100 Hz,处理数据时间长度为60 s;该时间段内存在有2个相对运行目标。数据采样率为20 kHz,ESPRIT方法的样本协方差矩阵在每一时刻采用20 000个采样数据进行估计,其具体估计方法:首先将数据分块,每块数据为2 000点,记为一次快拍样本长度,数据块之间重叠1 000点,快拍数为20,做FFT后选取2 900~3 100 Hz频段,对每个频点分别作协方差估计。而TD-ESPRIT方法按2.2节所示流程采用1次快拍数据进行处理,由于2 900~3 100 Hz频段为窄带,数据处理中只进行了一次滤波处理。图10—图12分别为CBF方法、ESPRIT方法和TD-ESPRIT方法所得时间历程图。
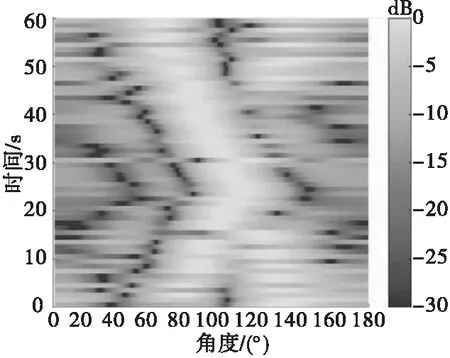
图10 CBF方法所得方位历程图Fig.10 Azimuth history of CBF
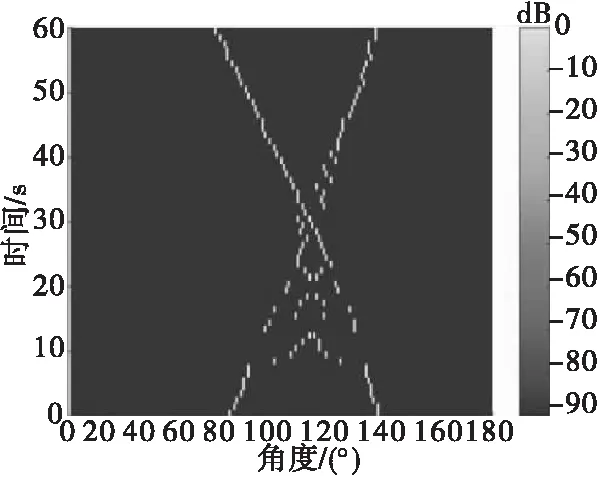
图11 ESPRIT方法所得方位历程图Fig.11 Azimuth history of ESPRIT
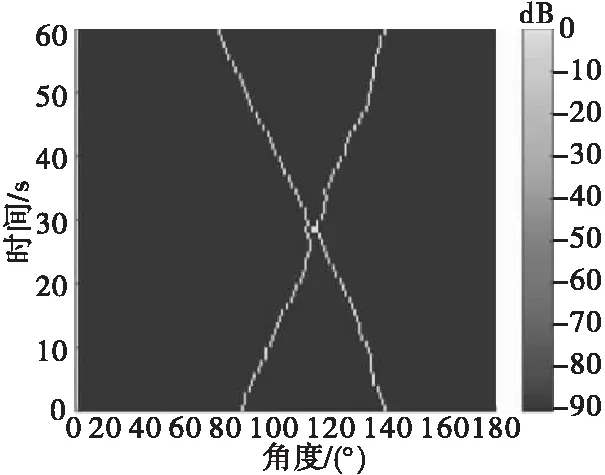
图12 TD-ESPRIT方法所得方位历程图Fig.12 Azimuth history of TD-ESPRIT
由图10—图12可知,TD-ESPRIT方法所得方位历程图显示目标航迹聚焦清晰,目标方位明晰可辨,该结果进一步证明了TD-ESPRIT方法在理论上和实测数据处理上的正确性。
4 结论
本文提出基于时域旋转不变技术的目标方位估计方法(TD-ESPRIT)。该方法利用两次傅里叶变换对阵列接收数据进行复解析变换处理,获取时域解析数据,并按窄带划分方式对其滤波处理;在不需要对解析数据做时延迟补偿情况下,通过多个时域采样点累积方式解决协方差矩阵估计所需快拍数问题,得到协方差矩阵估计值;通过旋转不变技术实现对该频带目标方位估计。数值仿真及实测数据处理结果表明,相比频域旋转不变方法,本文方法保持对目标方位估计精度前提下,在最低输入信噪比要求上降低了5 dB,进一步拓宽频域旋转不变方法在工程领域的实现方式。
猜你喜欢
花火彩版B(2020年5期)2020-09-10
振动工程学报(2019年2期)2019-05-13
数学学习与研究(2018年3期)2018-03-14
物联网技术(2016年11期)2017-01-12
科学与财富(2016年18期)2016-12-22
考试周刊(2016年54期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
能源研究与信息(2015年3期)2015-11-18
现代电子技术(2015年10期)2015-05-29
能源研究与信息(2014年3期)2014-10-30