面向协同的高超声速巡航导弹航迹规划
2022-07-08 08:04秦钰彧夏丰领黄国勇
探测与控制学报 2022年3期
秦钰彧,夏丰领,黄国勇,
(1.昆明理工大学信息工程与自动化学院,云南 昆明 650504)
(2.昆明理工大学民航与航空学院,云南 昆明 650504)
0 引言
高超声速巡航导弹(hypersonic cruise missile,HCM)具有飞行速度快、飞行高度高等特点,使得传统的防御设施无法威胁其安全。但随着THAAD-ER、S-500导弹等传统装备性能的升级和高能激光武器等新概念装备的成熟,高超声速巡航导弹也将面临防御方的拦截威胁。为了提升高超声速巡航导弹完成任务的能力,有必要研究高超声速巡航导弹的航迹规划方法,为多弹协同末制导和更灵活的战术使用创造条件。
针对HCM航迹规划问题,文献[1]提出一种基于改进稀疏A*算法的高超声速飞行器航迹规划技术,能够有效地避开各种威胁,但没有对飞行器最短路径进行研究;文献[2]在Dubins曲线规划基础上,设计了用于高超声速飞行器的路径规划算法,但未考虑角度和时间协同规划问题。
多弹协同攻击是一个广泛研究的问题,是提升突防概率的重要手段,亦是实现效能倍增的关键[3]。多弹协同主要解决攻击的时空同步问题,以达到攻击时间的协同和攻击空间态势的协同。在时间协同方面,已存在通过调整路径或调整HCM的飞行速度来实现时间协同的研究:文献[4]通过调节无人飞行器的速度,从而保证多飞行器在时间上的合理安排;文献[5]通过调整部分飞行器的航迹长度从而在时间上保持协同。在攻击空间态势上的协同主要是为末制导段提供设定的多弹攻击的空间:文献[6]将Dubins曲线运用于多弹协同打击的中段航迹生成过程,提出了一种多弹协同对面目标进行时空一致饱和攻击的方法;文献[7]结合Dubins曲线,将飞行器数目增加带来的计算量指数增长的问题,转化为多项式乘积形式的计算量,从而能实时生成满足时空协同要求的次优航迹,但均未针对HCM的特点开展研究。对于HCM来说,由于其高技术、高性能的特点,一般采用有限个数的多弹协同,在中制导段通过时间和空间态势的协同,为多弹协同末制导提供条件支持,最终完成目标攻击任务。在当前技术条件下,由于HCM的高空飞行特点和对外通讯的非可靠支持特点,其航迹规划要求具有很高的规划效率和极低的信息通讯依赖。
HCM只攻击地面高价值目标,暂不针对移动目标,面对威胁具有不确定性的情况,比如机动的防空系统等,已有学者展开了一系列研究,主要有弹性突防制导技术、多HCM协同突防技术、可解释的智能突防技术三个方向[8-10],其中Dubins在编队协同避障飞行问题上有很好的解决能力[11]。
高超声速巡航导弹由于高速飞行带来的等离体影响,其通讯能力受到严重影响,实战条件下,为了隐蔽突击,也不适于开展主动通信。但考虑到后续可能的技术突破或有限通信能力条件下,可先开展离线路径规划,再进行在线航迹规划。离线路径规划是事先对飞行的环境进行评估,确定可能的限制条件和任务目标,据此开展预设路径的规划。Dubins路径就是一种高效的路径规划算法,通过对威胁区的发射前评估完成事先路径规划,以降低其对信息通信的需求。在线航迹规划需要由飞行器按照当前的任务目标和约束条件进行动态规划,此方法要求具有现实威胁约束和目标数据的高效表达,规划算法的高计算效率和良好的系统时空一致性协调方案等性能。目前多约束下实现精确多障碍避障的智能算法是基于大内存、高运算速率的PC机平台实现的,弹载计算机内存小、运算速度慢,尚有诸多技术问题需要解决。而Dubins算法对弹载计算机要求较小,只是在信息通讯能力支持上要满足要求。在当前的技术条件下,如果通讯保持畅通,可采用多威胁区路径搜索在控制中心完成,单个威胁区则可由弹载计算机在线完成,否则按事先离线规划的方式执行。所以以当前的技术条件来看,适宜于按事前离线规划的方法开展飞行器的航迹规划,同时需将规划算法的内存消耗和计算量降到硬件可以接受的范围,让在线航迹规划以离线规划结果为目标开展航迹的自主规划。
在现实场景中,HCM一般会面对多个威胁区,考虑到多威胁区的规划可采用搜索算法将其拆解成多个单一威胁区,故本文主要研究基于最短规划路径的时间协调以及中末制导交接部分的进入角协同,在后续研究中拟采用搜索算法完成多威胁区避障规划。
1 HCM航迹规划原理
1.1 威胁约束
威胁约束主要包括探测型威胁和攻击型威胁。探测型威胁主要考虑雷达,攻击型威胁主要有高速动能武器、激光武器和电磁脉冲等概念武器。
雷达探测概率的建模比较复杂,可将探测型威胁的最大作用范围视为半球体[12]。一般情况下,攻击型威胁的作用范围为半球形禁飞区,于是在二维水平面上将威胁作用范围均等效为以发射装置或武器发射装置位置为圆心,最大作用范围为半径的圆。
本文在进行规划时,采用等高飞行假设,根据以上威胁模型,统一将威胁约束视为需要避开的威胁区域圆,威胁区域圆半径已包含HCM与实际威胁区域之间的安全距离。
1.2 协同规划需求
HCM在飞行中经历发射段、中制导段(也称巡航段)和末制导段。由于HCM发射的灵活性,在协同制导中暂对发射段不作考虑,而只从爬升结束进入中制导阶段开始研究。考虑到HCM协同末制导的需求,在巡航高度上选取以目标点为中心,以某半径为圆心的圆周,作为中制导段与末制导段的交接线。如图1中的圆Ce即为中末制导交接线,给定末制导攻击航向后,即得攻击路径的中末制导交接点,如Pf0等。中制导段的任务是满足避障为目的的飞行航迹规划,要求路径最短,满足时间和末制导进入角的需求,规划效率高。末制导段的任务是以空间上分散进入为基础,遂行协同攻击。
本文对HCM巡航段进行规划,即规划的起点为中制导段的起点,规划的终点为给定攻击航向的中末制导交接点。
多枚HCM自距攻击区域数千公里的初始位置发射,要求在指定时刻以指定攻击航向角到达目标攻击区域。为保证多个HCM在指定时刻到达指定的中末制导交接点,应基于HCM的飞行性能,按照航程和飞行速度计算飞行时间,通过调控HCM发射的时间间隔规划实现时间协同。
HCM的航迹规划还应满足其在到达中末制导交接点时,调整为设计的攻击航向角的要求,从而实现攻击航向角的协同,如图1所示。
以HCM的攻击终点为圆心作圆,半径为中末制导交接点相对目标的水平距离,得到中末制导交接点圆,称为攻击区域圆,攻击区域圆半径需大于俯冲段所需距离。以目标点作多条射线将圆划分出的扇形区域为攻击扇区,给定两条射线标出的攻击扇区则为选定攻击方向。给定攻击航向与攻击区域圆的交点为该方向的中末制导交接点,也是Dubins路径的规划终点。在图1中,Pfi代表不同攻击航向角要求下的航迹规划终点,θei代表不同规划路线后的最终攻击航向角(用相对初始发射航向的角度来表示)。
图1 航向角协同参考图Fig.1 Course angle synergistic reference chart
2 面向协同的HCM航迹规划
2.1 航迹规划模型建立
高超声速飞行器爬升至要求的巡航窗口后,开始进入巡航段进行高速巡航飞行,并保持超燃冲压发动机工作直至巡航飞行结束。此时在一定范围内飞行速度与飞行高度相关,如果需要可有限调节飞行的速度。不失一般性,选择适应的飞行高度和速度,可将高超声速飞行器在巡航段视为等高的匀速运动,航迹由速度和航向角确定。暂不考虑地球曲率,则航迹规划问题便简化为二维水平轨迹规划问题。考虑到同型导弹的性能相近、目标参数装订一致,在不影响协同问题研究的情况下,假设协同攻击的各导弹性能相同,助推段末端的初始速度、高度相同,初始航迹倾角、速度和航向角一致。
考虑到防御系统的攻击边界均具有相对武器距离相等的特点,不失一般性,本文把防御系统的攻击区域以圆区域假设,定义为威胁区域。
图2 HCM单威胁区避障示意图Fig.2 Obstacle avoidance diagram of aircraft single threat area
此时,HCM单威胁区域避障路径规划问题可以描述为:HCM从起始点出发,通过路径规划寻找避障路线,并按规划路径飞行避开威胁区域,安全到达路径规划终点,再通过航向调整实现在给定时刻、给定航向情况下到达给定攻击目标点,具备进入协同末制导的条件。HCM单威胁区避障问题,如图2所示。
图2中,威胁区域是以Oz为圆心、最大半径R的威胁区域圆。起始点、起始航向、威胁区域、规划终点以及规划终点驶出航向均已知。对于不同规划策略下的第i号航迹,可将到达Dubins规划终点时的航向角视为已调整为起始航向。
2.1.1Dubins路径
Dubins路径可以简单定义为:在最大曲率限制下,平面内两个有方向的点间的最短可行路径由两个圆弧和与圆弧相切的直线或者圆弧组成。针对HCM的航迹规划,把起始圆作为起始航向的调整阶段,把终止圆作为规划终点结束后的航向调整阶段,则在起始转弯圆、威胁区域圆以及终止转弯圆之间找到合适的切线或圆弧,就可以得到单威胁区域情况下的Dubins路径。
HCM从起始位置出发有两种起始转弯圆,到目标位置结束也有两种终止转弯圆。起始圆与终止圆的半径等于HCM转弯半径r。设HCM在某飞行速度下的最小转弯半径为rv,min,其受HCM的性能限制,在任意速度下,HCM转向时满足r≥rv,min。
图3 避障规划路径示意图Fig.3 Obstacle avoidance planning path diagram
由于HCM运动方向和运动轨迹的连续性,路径可分为右转开始规避的路径(如图3实线部分)和左转开始规避的路径(如图3虚线部分),起始点Ps(xs,ys)处作顺时针转弯圆Cs,圆心记为Os,规划终点Pf(xf,yf)处作顺时针转弯圆Cf,圆心记为Of。
在巡航段中的避障规划路径中,HCM初始航向设为由起始点指向目标点的方向,而避过威胁区域到达终点后的最终驶出航向也保持为原航向θs。选择其中从起始点顺时针转弯规划路径为例[13],则根据当前平面直角坐标系,航向θs可表示为:
(1)
对应起始航向θs,圆心坐标Os(xcs,ycs)和Of(xcf,ycf)可以由式(2)求得:
(2)
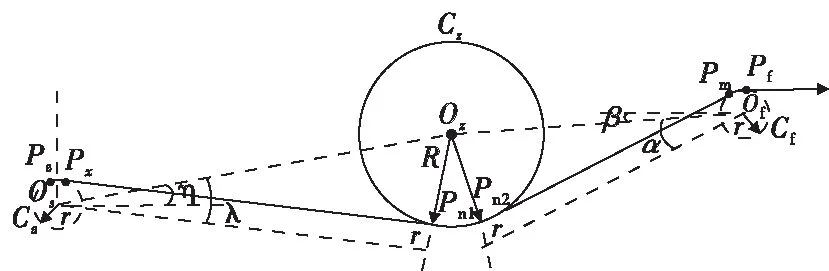
图4 右转避障路径求解Fig.4 Turn right to solve the obstacle avoidance path
再以r为半径作圆弧连接Pm和Pf,得到基于Dubins方法的避撞规划路径为:Ps→Px→Pn1→Pn2→Pm→Pf,如图4所示。

(3)

(4)
2.1.2Dubins路径长度计算
因为Dubins路径是由圆弧与直线组成,所以设起始切出点Px到威胁区域圆切入点Pn1的长度d1,威胁区域圆切出点Pn2到目标切入点Pm的长度d2可由式(5)求得:
(5)
每段圆弧路径长度可由式(6)求得:
li=riθi,
(6)
式(6)中,ri为圆弧路径所在的第i个转弯圆的半径,θi为第i个转弯圆上两个切点对应的圆弧角,且圆弧角与两切点处的航向角夹角相等,0<θi<π。
因为规划时已将HCM巡航段视为匀速运动,则v为飞行器飞行速度。单个HCM通过规划路径所花费时间由式(7)求得:
(7)
可见,各弹由于攻击航向不同导致的路径差,最终反应在飞行时间上。完成攻击时间协同,可采用调节发射时间的方式,飞行时间长的先发射,发射间隔即为飞行时间差。
2.2 Dubins规划终点选取
当θe为最终攻击航向角,Pf为进入攻击区域圆Ce的交点,记为整段规划终点,也是按规划需求分析时,HCM按规定攻击航向角进入攻击区域的规划航迹终点。点Pfm为调整攻击航向角到达攻击就位点Pfn前,Dubins避障规划路径的终点,点Pfm的选取对最终攻击航向角和规划航迹长度有影响。
假设进入圆Ce后HCM便进入俯冲飞行的末端攻击段,所以巡航段规划的航迹选择仅考虑起始点到进入攻击区域圆交点Pf的部分,即中制导部分的航迹规划。
2.2.1当Dubins规划终点选取在远离攻击区域圆的位置
当Dubins规划终点Pf1选取在与攻击区域圆相切的转弯圆上,如图5所示,Pn2是到达目标点Pf1的威胁区域圆切出点,Pf3是调整攻击航向后攻击就位点,将Ps→Pn2→Pf1→Pf3→Pf记作编号1的航迹,航程长度记为L1。当Dubins规划终点Pf2选取在与攻击区域圆相离的转弯圆上,Pn3是到达目标点Pf2的威胁区域圆切出点,Pf4是调整攻击航向后攻击就位点,将Ps→Pn3→Pf2→Pf4→Pf记作编号2的航迹,航程长度记为L2。
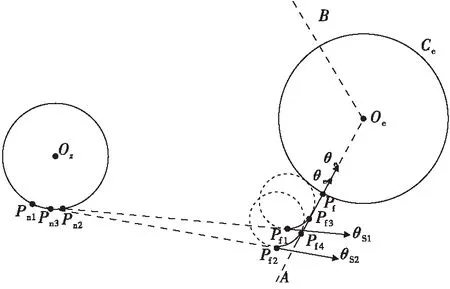
图5 终点选取远离攻击区域对航迹影响Fig.5 Effect of destination selection on flight path
转弯圆半径一致,两种目标点到达目标点后的航向分别记为θs1和θs2,经过转弯圆调整后的攻击航向θe。对于编号1的航迹Ps→Pn2→Pf1→Pf3→Pf和编号2的航迹Ps→Pn3→Pf2→Pf4→Pf存在以下关系:

∴L2>L1。
即威胁圆切出点Pn3到点Pf距离大于威胁圆切出Pn2点到点Pf距离,所以选Pf1为目标点时,1号航迹的航程较短。
2.2.2当Dubins规划终点选取在靠近攻击区域圆的位置
当Dubins规划终点Pf0选取在与攻击区域圆相交的转弯圆上,如图6所示,Pn4是到达目标点Pf0的威胁区域圆切出点,Pf5是调整攻击航向后攻击就位点,此时考虑最极端的情况即攻击就位点Pf5与整段规划终点Pf重叠,将Ps→Pn4→Pf0→Pf(Pf5)记作编号0的航迹,航程长度记为L0。当目标点Pf1选取在与攻击区域圆相切的转弯圆上,Pn2是到达目标点Pf1的威胁区域圆切出点,Pf3是调整攻击航向后攻击就位点,将Ps→Pn2→Pf1→Pf3→Pf记作编号1的航迹,航程长度记为L1。
转弯圆半径一致,两种情况下到达Dubins规划终点后的航向分别记为θs1和θs0,经过转弯圆调整后的攻击航向θe。
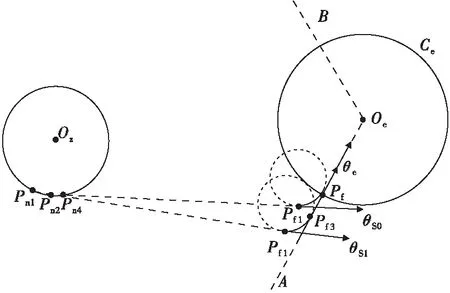
图6 终点选取靠近攻击区域对航迹影响Fig.6 Effect of destination selection on flight path
同理可证L1>L0,威胁圆切出点Pn3到点Pf距离大于威胁圆切出点Pn4到点Pf距离。所以选点Pf0为目标点时,0号航迹的航程较短。
在给定航向上,整段规划终点距离攻击区域圆越近规划航程越短,整段规划终点在目标攻击区域圆边界上的情况是最短路径。
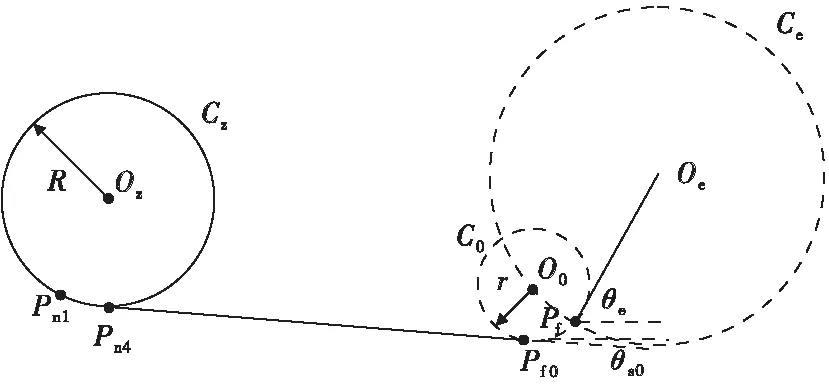
图7 规划终点的求解Fig.7 Solution of the end point of the program
此时,整段规划终点所在切线方向为θe,攻击区域圆Ce半径为Re,与圆C0相交,交点Pf(xf,yf),圆C0半径r,如图7所示,圆心O0(xc0,yc0)可以由式(8)求得:
(8)
攻击区域圆相交的转弯圆记作C0,转弯圆半径r,圆心O0,Dubins规划终点Pf0时航向角θs0,规划终点Pf0可以由式(9)求得:
(9)
实际规划时,HCM绕开威胁区域后到达攻击区域圆的航程较长,可视为到达Pf0前的航向角已调整为初始航向角θs,即θsi=θs(θsi为第i号航迹Dubins规划终点处航向),(xe0,ye0)为最终攻击区域圆Ce圆心坐标。
(10)

(13)
2.2.3根据所需攻击航向角选取Dubins规划终点
图8 不同攻击航向参考航迹图Fig.8 Refer to the track chart for different attack heading
以攻击目标点Oe(xe0,ye0)为圆心作圆得到最终攻击区域圆Ce,θe为最终进入攻击区域的攻击航向角,以攻击航向角为约束进行避障规划时,将HCM到达Dubins规划终点记为Pfm,经过最小转弯角调整航向角,到达攻击就位点记为Pfn。在图8(a)、(b)中,Pf1和Pf2分别代表不同避障策略下的Dubins规划终点,θe1和θe2代表针对这两个不同Dubins规划终点所规划路线后的最终航向角,Pf3和Pf4分别代表不同Dubins规划后的攻击就位点,Pn3和Pn4是不同Dubins规划航迹的威胁区域圆切出点。
3 仿真分析
根据上述的算法分析,在仿真阶段以避障航迹作为目标函数进行求解计算,并用Matlab进行仿真验证。路径规划区域参考坐标系正北方为y轴,正东方为x轴,单位103km,起始航向为正东方,航向改变时逆时针为正,顺时针为负。初始参数见表1。
表1 航迹仿真参数Tab.1 Path planning simulation parameters
3.1 最短路径仿真
根据表1设置,选取攻击航向角为东偏北60°,对整段规划终点不同情况下三种航迹进行仿真,可得到如图9所示的单障碍环境下不同规划终点航迹仿真结果,其中0号航迹为规划终点在攻击区域圆上的情况,1号和2号航迹为规划终点远离攻击区域圆的情况。相应的,航迹仿真的相关参数见表2。
图9 单障碍环境下不同规划终点航迹仿真结果Fig.9 Simulation results of different planned end points in single obstacle environment
表2 单障碍环境下不同规划终点航迹仿真结果Tab.2 Simulation results of different planned end points in single obstacle environment
仿真时以攻击航向角作为约束条件进行航迹规划,比对设置不同规划终点位置时的航程。从仿真结果可以看出,在同一攻击航向角的情况下,整段规划终点在目标攻击区域圆边上时的规划航迹最短。
3.2 三弹协同规划仿真
根据表1设置,选取整段规划终点落在攻击区域圆边上,其中0、1和2号航迹分别为攻击航向角为东偏北60°、0°、-60°时三种情况下的航迹进行仿真,可得到如图10所示的单障碍环境下不同攻击航向航迹仿真结果,结果如表3所示。
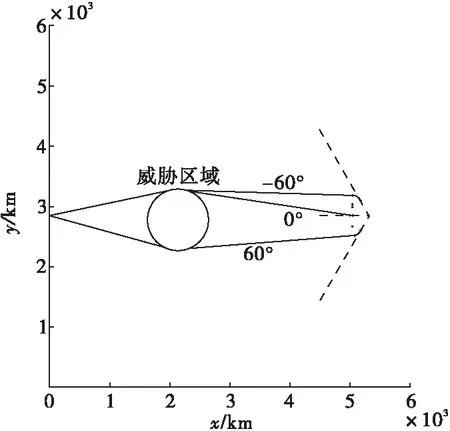
图10 单障碍环境下不同攻击航向航迹仿真结果Fig.10 Simulation results of different attack course tracks in single obstacle environment
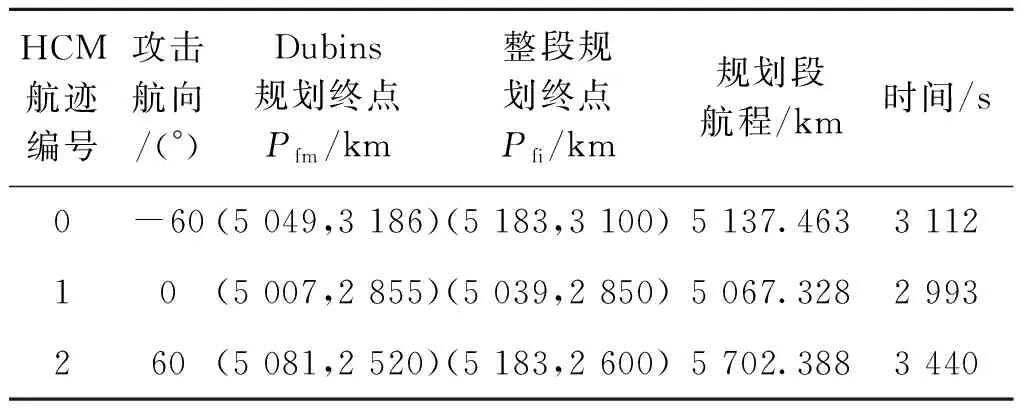
表3 单障碍环境下不同攻击航向航迹仿真结果Table3 Simulation results of different attack course tracks in single obstacle environment
仿真显示采用前文设计的方法后完成三弹协同规划,各弹航迹均满足攻击航向角约束,也能通过计算航程得到发射时间间隔,实现攻击的协同。
4 结论
本文通过对HCM协同制导的需求分析,对中、末制导的任务进行了划分,给出了HCM协同制导的解决方案。以航迹规划任务为基础,针对HCM中制导中的航迹规划问题,在给定中末制导交接航向约束的条件下,解决了Dubins路径与所要求攻击航向的衔接问题,实现了Dubins路径规划方法在HCM航迹规划中的应用,并通过仿真计算分析了其性能。结果显示,在给定航向角条件下,以给定半径调整转弯的方式完成航迹地规划时,规划航迹终点距离中末制导交接点越近,规划航迹的航程越短。
本文规划的巡航阶段航迹是在定高、匀速飞行条件下实现的,未来可引入HCM的性能参数进行改进。本文只对单一威胁区的航迹规划问题进行了研究,当规划中出现多威胁区域的情况时,可结合搜索算法先进行路径搜索,得到可行的航路点,再将航路点转化为规划中点间,通过多个Dubins路径衔接的方式实现最终的路径规划。如果威胁区发生变化,则按照当前的威胁区情形重新开展下一个航路点以后的路径搜索,确定新的规划中间点,再完成航迹的重规划。
猜你喜欢
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
当代陕西(2019年17期)2019-10-08