基于耦合Duffing 振子的局部放电信号去噪方法研究∗
2022-07-10 02:15姜敏敏罗文茂崔应留
电子器件 2022年2期
姜敏敏 罗文茂 崔应留
(1.南京信息职业技术学院数字商务学院,江苏 南京 210023;2.南京审计大学信息工程学院,江苏 南京 211815)
电力设备进行局部放电(Partial Discharge,PD)信号实时监测是保障设备安全运行的重要手段。由于局部放电信号本身非常微弱,往往会被噪声淹没,所以有效去除噪声就成为局部放电信号监测的一个重要课题。利用在线监测系统进行局部放电信号监测时,局部放电信号往往会混入强烈的随机脉冲干扰、周期性窄带干扰、高斯白噪声等外部干扰信号,提取局部放电信号将变得很困难。对于随机脉冲干扰、周期性窄带干扰两类信号可以采用快速傅立叶变换、广义S 变换等方法进行滤除。滤除掉这两种干扰后,就需要滤除高斯白噪声,本文讨论的即是高斯白噪声的滤除问题。
由于局放信号波形各不相同,所以对微弱局放信号去噪后应该尽量保留信号的波形特征,以利于放电模式的进一步解析。常用的局放信号去除高斯白噪声的方法有:经典滤波、小波变换[1]、变分模态分解[2]、空间相关[3]、经验模态分解[4]、S 变换加经验模态分解[5]、自适应奇异值分解[6]等方法。但是这些方法的去噪能力有进一步提高的空间。
当前已经证明,混沌振子在某些信号处理方面的能力优于传统信号处理方法,所以利用混沌振子进行局放信号去噪是一种很有前景的方法。
Duffing 振子作为一种应用广泛的混沌振子,对白噪声具有良好的抑制能力,已经广泛应用于多频正弦信号参数估计[7]、通信信号检测[8]、机械故障诊断[9]、声信号检测[10]、雷达信号参数估计[11]等方面。而局放信号是一种非周期脉冲信号,可以利用耦合Duffing 振子系统对其进行处理。
文献[12]首次提出了一种基于线性回复力耦合的非反馈控制的双Duffing 振子系统,并将其应用于非周期信号的去噪。其后,文献[13]将文献[12]的振子耦合形式进行了变形,提出一种双向环形耦合形态,利用振子间的瞬态同步突变现象对非周期脉冲信号去噪,并将其成功用于局放信号去噪[14]。但是在文献[12-14],以及其他文献[15-16]中,用于非周期信号去噪的耦合Duffing 振子系统都是基于线性回复力耦合的形式,该形式存在一定的问题,如:同步过程慢,会导致输出信号存在寄生振荡,无法精确跟踪信号的下降沿;振子间耦合程度低,信号时宽或幅度较大时会破坏其同步过程,且对噪声的抑制能力不足。文献[17]提出了一种阻尼力与线性回复力共同耦合的新型Duffing 振子系统,并证明了该系统比线性恢复力耦合的Duffing 振子系统脉冲信号检测能力强。
本文将在该文献的基础上,探讨该种振子系统模型在局放信号去噪时的潜在能力。从文中的讨论可以看出,本文构建的耦合Duffing 振子系统应用于局放信号去噪时,能更为有效地抑制噪声,同时较好地保留波形细节。同时,由于耦合振子系统的求解采用递推方法,运算速度快,且可以构造并行计算,适用于局放信号的实时处理。
1 耦合Duffing 振子系统
文献[13]基于线性回复力耦合的思想,提出了一种由3 个振子构成的双向环形耦合Duffing 振子系统,并指出利用振子间的同步突变能凸显噪声中的信号,同时也一并说明了该振子系统的不足:无法处理幅值有正有负的信号,无法处理大时宽的信号等。这些问题主要是由于振子间耦合强度较低的原因导致的。本文提出了一种3 振子耦合的Duffing系统,其微分形式为:
式中:振子的阻尼比为0.32;阻尼力的耦合强度为k1;线性回复力的耦合强度为k2;周期驱动力的幅值为f;外部待处理信号为s(t)。该系统具有振子间阻尼力和线性回复力共同耦合的特征。系统的输出为振子状态变量的差值x1-x3,即振子间的同步误差信号。
对于(1)式所示耦合Duffing 振子系统,从小到大调节f可使振子状态从同宿轨道状态向倍周期分岔、混沌、大周期状态迁移。而耦合强度k1、k2则决定了振子间同步速度的快慢和振子振荡幅度。本文利用定步长四阶龙格库塔法求解混沌振子系统。经过仿真发现,振子系统的去噪性能和耦合强度、周期驱动力的幅值、递推求解步长等因素有关。
(1)振子状态的选取
在阻尼比为0.32、系统求解时长为5 200 s 时,在周期驱动力的幅值f略大于0.269 651 时振子从同宿轨道状态变为倍周期分岔状态,在略大于0.276 435时振子从倍周期分岔状态变为混沌状态,在略大于0.553 639 时振子开始进入大周期态。
仿真发现,本文提出的耦合振子系统在同宿轨道状态(如f取0.23)和大周期状态(如f取0.9)都有很好的去噪性能。
(2)耦合强度的选取
对于不同的振子状态,耦合强度需取不同的值才能得到较好的去噪性能。在同宿轨道状态时,耦合强度k1取10、k2取0.01 左右时去噪效果较好,而在大周期状态时,耦合强度k1取0.01、k2取10 左右时去噪效果较好。
(3)递推求解步长的选取
在耦合度取定的情况下,定步长四阶龙格库塔法求解微分方程组时的递推步长会影响系统性能。递推求解步长过小、过大时,系统性能都会变差。仿真结果显示,振子在同宿轨道状态(如k1取10、k2取0.01)、大周期状态(如k1取0.01、k2取10)时,递推求解步长大致在0.012 5 s~0.160 0 s 区间,系统的去噪性能最好。
2 耦合振子系统的性能分析
为了研究本文振子系统的去噪性能,与双向环形耦合Duffing 振子系统(文献[13]中的(3)式)进行了对比。为了方便比较,设置两种振子系统都处于同宿轨道状态。文献[13]的(3)式中f取0.23,本文振子系统的参数为:k1取10、k2取0.01、f取0.23,递推求解步长为0.05 s,求解总时长为5 000 s。文献[13]和本文的振子系统的三个振子的初值都依次取[-0.35,-0.65]、[-0.2,-0.15]、[-0.4,-0.5]。为了表述方便,以下统称本文提出的振子系统为方法1,而双向环形耦合振子系统为方法2。
(1)振子间的同步速度
图1 是方法1 和方法2 的同步过程的对比。其中:图1(a),图1(b),图1(c)是方法1 的3 个振子间的同步误差信号(即振子状态变量之差:x1-x3、x3-x2、x1-x2);图1(d),图1(e),图1(f)是方法2 的3 个振子间的同步误差信号(即振子状态变量之差:x1-x3、x3-x2、x1-x2)。从图1 可以看出方法1 的振子同步过程很快,而方法2 的振子同步过程比较慢。
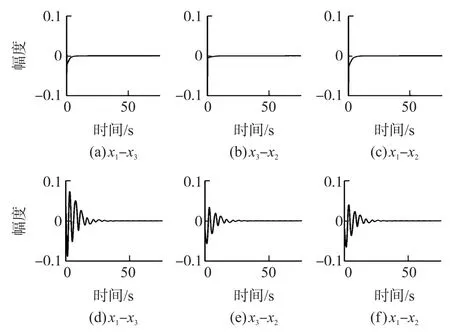
图1 振子同步过程对比
在振子自激振荡过程中,于2 500 s 处加入一个宽度为5 s,幅度为0.1 的方波,该信号对振子同步的扰动如图2 所示。图2 中的三幅图依次为方波信号、方法1 的同步误差信号(x1-x3)、方法2 的同步误差信号(x1-x3)。可以看出,方法1 对方波信号上升、下降沿的跟踪快速准确,而方法2 存在正负振荡的拖尾,信号恢复的准确性将受影响。
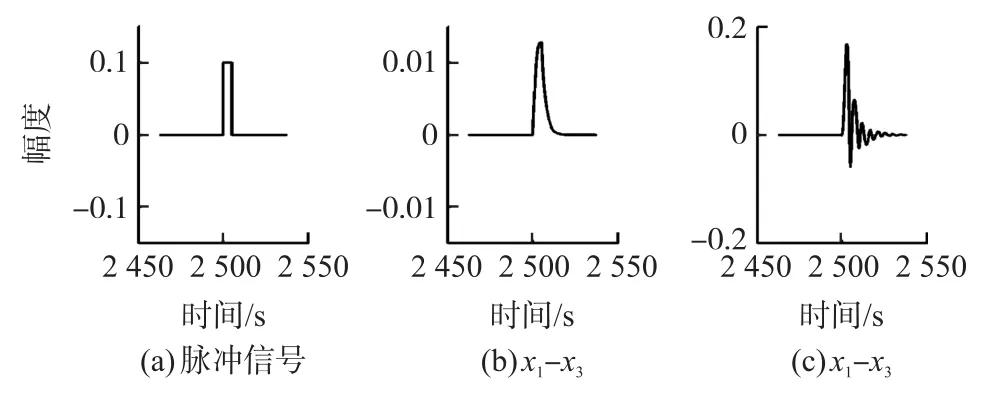
图2 振子同步的扰动
(2)大时宽信号去噪
文献[13]指出方法2 不能处理大时宽信号,因为信号的持续扰动会使振子同步失效。图3 的第一幅图为一个幅值为0.03、持续时间为2 500 s~3 500 s 的方波(白色线条所示),叠加了方差为0.01 的高斯白噪声的原始信号,第二幅图是方法1 的输出结果,第三幅图是方法2 的输出结果。可以看出方法1 可以对该信号正常去噪,方法2 则不能。
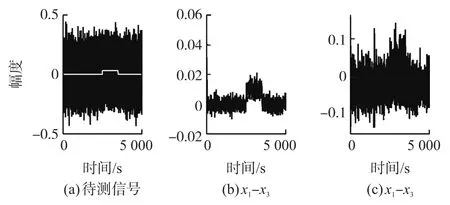
图3 大时宽信号的去噪
(3)波形跟踪能力
为了观察振子系统对任意波形的跟踪能力,将一个不带噪声的没有规律的波形输入振子系统,观察振子系统的输出。图4 的第一个图是输入波形,第二个图是方法1 的输出,第三个图是方法2 的输出。从两种方法的输出结果来看,方法1 的输出能较好地跟踪输入波形的走势,方法2 则不能。
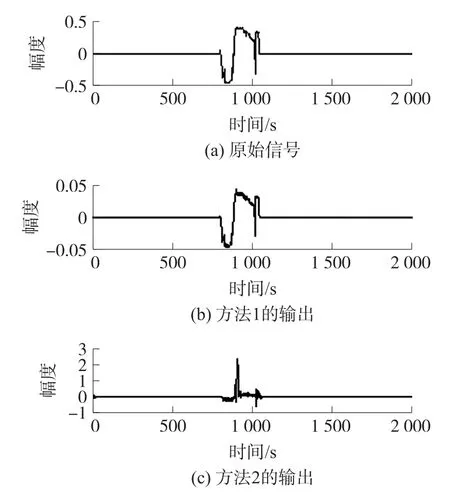
图4 振子系统对任意波形的响应
3 局放信号去噪
指数衰减模型和双指数振荡衰减模型是两种常用的局放信号模型,其表达式分别为:
式中:A1、A2为信号幅值;τ、λ为衰减系数;fc为信号中心频率。
设定指数衰减信号的幅值A1为1、衰减系数τ为8×10-9,双指数振荡衰减信号的幅值A2为6、衰减系数λ为8×10-9、中心频率为200 MHz。两个信号串联输入,第一个信号位于80 ns,第二个信号位于200 ns,其波形如图5(a)所示。在输入信号中加入方差为0.1 和0.5 的高斯白噪声,分别如图5(b)、5(c)所示。
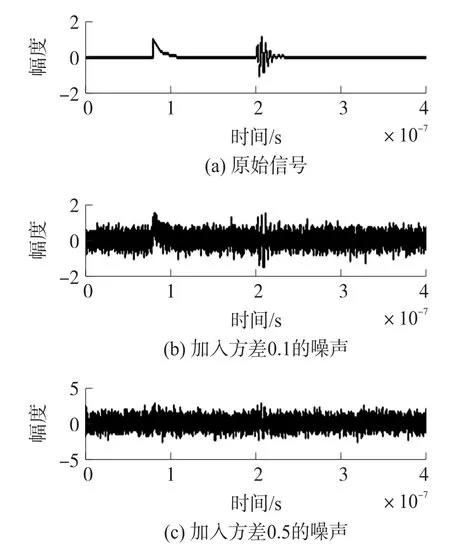
图5 仿真局放信号
将图5 所示局放信号分别用本文耦合振子、8级离散小波变换、自适应奇异值分解[6]、经验模态分解[4]等方法进行去噪,这些方法的去噪结果分别对应图6~图9。
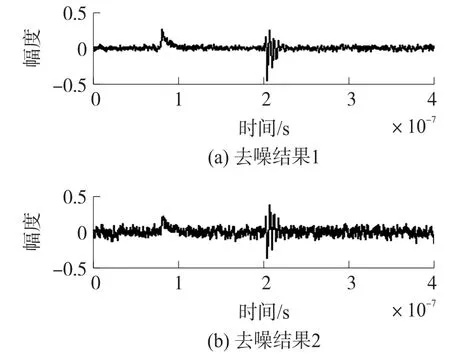
图6 本文振子系统的去噪结果
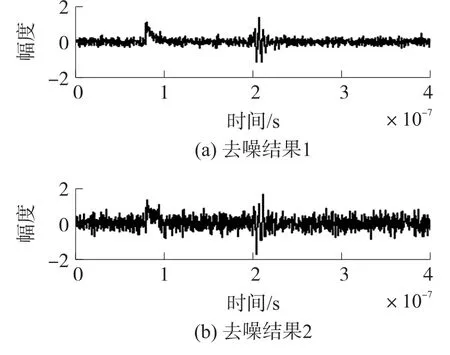
图7 8 级离散小波变换的去噪结果
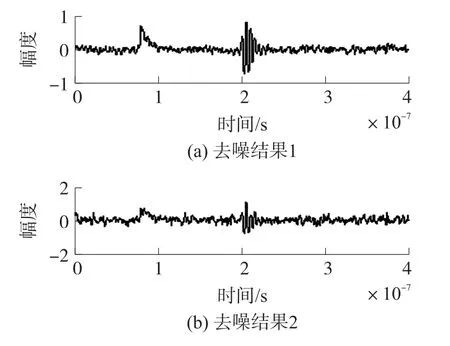
图8 自适应奇异值分解的去噪结果
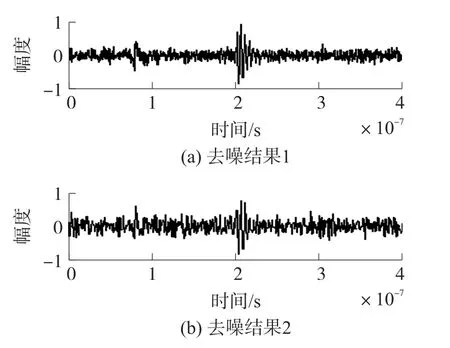
图9 经验模态分解的去噪结果
图6~图9 的第一幅图是针对混有方差为0.1的高斯白噪声信号的去噪结果,第二幅图是针对混有方差为0.5 的高斯白噪声信号的去噪结果。需要指出的是,由于内存会溢出,在执行自适应奇异值分解去噪时将原始信号进行了一倍的抽取。此外,经验模态分解去噪结果的第一幅图是将第4 至第8 个本征模相加生成,第二幅图是将第5 至第8 个本征模相加生成。
从以上去噪结果可以看出,这些方法对混有方差为0.1 的高斯白噪声信号都可以很好去噪,其中本文耦合振子和自适应奇异值分解的结果最佳。在对混有方差为0.5 的高斯白噪声信号去噪时,本文耦合振子的去噪结果最佳,两种类型信号的波形特征保留完整,噪声抑制较明显。8 级离散小波变换对噪声的抑制不好,去噪效果不佳。自适应奇异值分解方法对指数衰减信号去噪效果较好,但是对双指数振荡衰减信号的去噪效果不佳。经验模态分解方法对双指数振荡衰减信号的去噪效果较好,但是对指数衰减信号去噪效果不佳。
在对图5(c)信号去噪时,待处理信号的信噪比为-25 dB,此即本文方法的噪声抑制能力。文献[13]称其局放信号检测能力可以达到-25 dB 的信噪比。该文献方法仅是检测信号的有无,不考虑信号波形的恢复。而本文方法在噪声抑制能力、波形恢复能力两方面都有良好的性能,更能胜任局放信号去噪。
进一步观察运算速度,表1 将以上算法去噪过程的运算时间做了对比,其中运算时间1 指对混有方差为0.1 的高斯白噪声信号的处理时间,运算时间2 指对混有方差为0.5 的高斯白噪声信号的处理时间。其运算平台采用频率为3.2 GHz 的Intel Core i5-3470 CPU、4G DDR2 内存、Win7 32 位系统的联想台式机,利用MATLAB 2009a 32 位版本运行仿真。

表1 计算时间对比 单位:s
从表1 可以看出,本文耦合振子的运算速度最快,而自适应奇异值分解耗时最多。这主要由于本文耦合振子采用初值递推求解方法,所以运算速度最快。可以看出本文方法可以应用于局放信号实时监测系统中。
4 结语
本文提出了一种适用于局放信号去噪的耦合Duffing 振子系统,该振子系统利用阻尼力和线性回复力的共同耦合,达到了较高的耦合强度。该振子系统同步速度快,抑制噪声能力强。通过仿真实验研究,该振子系统对局放信号的去噪能力和波形恢复能力均比其他方法优异。该去噪方法的运算速度很快,且可将信号分段并行求解,所以本文方法适用于局放信号的实时求解。
猜你喜欢
现代信息科技(2022年8期)2022-08-12
智慧电力(2022年7期)2022-07-26
电子设计工程(2022年2期)2022-01-25
小天使·二年级语数英综合(2019年4期)2019-10-06
中国金属通报(2019年7期)2019-08-13
小学生学习指导(低年级)(2019年6期)2019-07-22
物理学报(2019年12期)2019-06-29
电子制作(2019年23期)2019-02-23
学校教育研究(2018年4期)2018-10-21
电影故事(2015年16期)2015-07-14