用于测量位移的新型传感器研究与设计∗
2022-07-10 02:16徐晓冰
电子器件 2022年2期
齐 琳 徐晓冰
(1.河北石油职业技术大学电气与电子系,河北 承德 067000;2.合肥工业大学电气与自动化工程学院,安徽 合肥 230009)
随着精密制造业的发展,对精密测量技术要求越来越高。位移检测技术作为振动、形貌、厚度等几何量精密测量的基础,不仅需要具有高精度,而且要求能适应不同的环境和材料,并且逐步趋向于实时、无损检测。位移传感器是准确、可靠获取位移信息的重要途径和手段,也是实现精密测量的基础。按照测量方式的不同,位移传感器可以分为接触式和非接触式。但是接触式位移传感器测量速度慢,实时性差,难以实现自动化测量,并且长期使用对测头磨损较大影响传感器的寿命和精度。因此非接触式位移传感器受到了更多关注[1]。
光谱共焦位移传感器是一种新型的具有超高精度和超高稳定性的非接触光电式位移传感器。其代表着先进技术的发展方向,但是其中的关键技术国外仍然处于垄断地位,国内相关研究较少,更没有成熟的产品。光谱共焦位移传感器包含了精密光机系统设计、光谱采集、数据分析等多项关键技术,加强该领域的研究,掌握其中核心技术,不仅有着重要的学术价值,而且有着广泛的市场前景。
光谱共焦位移传感器最先由法国STI 公司提出,其研究的控制器测量速度可以达到2 kHz。德国公司提出的高精度控制器,拥有较高的信噪比。我国在光谱共焦位移传感器领域的起步比较晚,长春光机所朱万彬等人设计的光谱共焦位移传感器理论测量精度优于5 μm[2-3];长春理工大学乔杨等人设计了两套基于卤素灯和光纤耦合器的光谱共焦厚度测量系统,实现了对透镜等透明材料厚度的测量[4-5],最小的测量位移可达9.8 mm;中国工程物理研究院激光聚变研究中心的马小军等人应用相向对顶安装的两个白光共焦传感器,对厚度为10 μm~100 μm 厚的靶材金属薄膜进行了精确测量[6];北京信息科技大学高鑫等人设计的光谱共焦位移测量系统,系统测量范围2 mm,精度可以达到10 μm,线性度3.4%[7];柳晓飞等人设计的光谱共焦位移测量系统测量范围20 mm,精度10 μm[8]。
综上所述,针对我国在位移传感器方面存在的问题,本文主要对光谱共焦位移传感器的测量原理和其中的关键技术进行研究,在此基础上对光谱共焦位移测量系统进行设计和搭建,并实现对位移量的测量。
1 系统分析与总体设计
1.1 光谱共焦位移测量技术原理及系统性能分析
光谱共焦位移测量技术的原理源于经典的共焦显微技术[9],它是在共焦显微技术的基础上加入了新的光学方法——彩色编码技术,因此扩展了聚焦的深度,解决了共焦显微技术中聚焦深度非常小的问题,使其可以应用在位移测量方面,并保留了共焦显微技术中高信噪比和高分辨率的优点。
基于分光棱镜式的光谱共焦位移测量系统结构如图1 所示,白光光源W 发出的光经过针孔P 后可以近似看做是点光源。点光源经过分光棱镜B 和色散物镜L 后,由于色散物镜的光学特性依赖于波长,因此在光轴上形成了一系列连续分布的不同波长的聚焦光斑,也就是所谓的彩色编码。
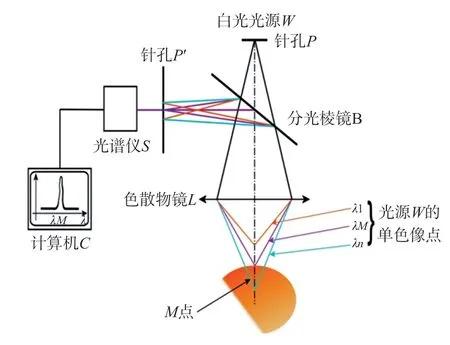
图1 分光棱镜式光谱共焦位移测量系统结构
光谱共焦位移测量系统的测量范围取决于色散物镜在系统中所用元件的共同波段范围内的位置色差大小。位置色差的形成是因为光学系统中使用的透镜色散的结果,对于传统的光学系统设计,透镜的位置色差被认为是一种像差,需要结合光学设计的方法来弥补它,但是在光谱共焦位移测量系统中,正是利用了透镜的位置色差才实现了彩色编码,使被测物的位置信息和波长结合在了一起。
光谱共焦位移测量系统的理论分辨率源于色散物镜的点扩散函数。点扩散函数描述的是点光源在经过光学系统后,由于透镜的衍射作用,在像面上形成的一个三维的空间光强分布。因为光谱共焦位移测量系统检测的是轴向位移量的变化,所以系统的分辨率取决于其点扩散函数的轴向分量,称其为轴向光强响应[10]。
由于光谱共焦技术源于共焦显微技术,所以可以首先对共焦显微系统中单色光共焦轴向光强响应函数进行分析,并以此为基础,推算得到光谱共焦位移测量系统中白光情况下的共焦轴向光强响应函数。在共焦显微系统中已经证明,当单色光照明时,在共焦位置处探测到的光强(非归一化)与轴向点离焦量之间的关系为[11]:

式中:a为成像透镜的孔径,λ为入射光的波长,f为成像透镜的焦距,u是归一化的轴向光学坐标。
1.2 光谱共焦位移测量系统总体设计
光谱共焦位移测量系统主要包括白光光源、共焦光学系统、光谱仪和计算机等四个部分,如图2 所示。其中共焦光学系统由色散物镜和光纤耦合器组成,光谱仪部分由分光系统、光电阵列探测器CCD和处理电路组成。

图2 光谱共焦位移测量系统组成
2 光学系统分析及设计
在光谱共焦位移传感器系统中,系统的测量范围受4 个方面的因素影响:(1)光源光谱分布范围;(2)色散镜头在工作波段范围内的轴向色差;(3)光谱仪的工作波段[12];(4)光纤耦合器的工作波段。选择的白光LED 光源的光谱分布如图3 所示,波段400 nm~800 nm,所以在设计过程中,色散镜头、光谱仪和光纤耦合器的工作波段要尽量与光源的波段一致,最终系统的测量范围为色散物镜在其共同工作波段范围内的轴向色差。
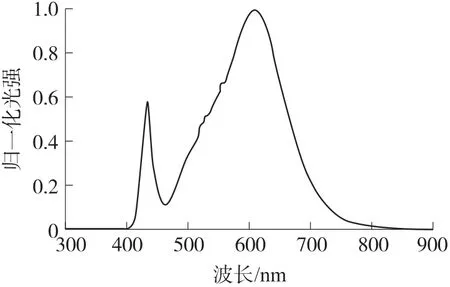
图3 光源光谱光强分布
在设计色散镜头时,除了要考虑其轴向色差外,还要考虑如下因素:(1)增大物方数值孔径可以提高分辨率;(2)增大像方数值孔可以提高光源利用率;(3)减小系统球差可以提高精度;(4)系统结构要易于装配和调整[13]。
以上这些因素是相互制约的,增大数值孔径的同时系统球差也随之变大,如果要校正球差系统,结构就会变得复杂,所以色散镜头设计的目的是用最少的透镜达到最理想的效果。光谱共焦位移传感器的光学系统可以看成两个部分,一部分是消色差场镜,它的焦点在光源处,把点光源准直成平行光,另一部分为色散物镜,它的作用是把不同波长的平行光聚焦在轴上的不同位置,形成光谱色散[14],而消色差透镜和非球面透镜正好可以起到这样的作用。本文采用了美国thorlabs 公司的消色差和非球面透镜组合,色散镜头设计如图4 所示。并选择在光源波段范围内耦合效率较高的光纤耦合器和分辨率为0.5 nm 的光谱仪。

图4 光源光谱光强分布
通过ZEMAX 软件仿真分析,在400 nm~700 nm波段色散镜头的色散范围为2.3 mm,具体波长与聚焦位置的对应关系如图5 所示。由于系统要分析反射回光纤的光谱光强分布情况,所以对共焦过程进行了模拟,在仿真过程中,将平面镜置于焦面处,使通过光学系统的光经过平面镜反射后又回到光学系统,并成像在光源位置[15]。通过观察像面处的点列图发现,当平面镜设置在不同波长的焦面处时,聚焦波长在像面处的弥散斑较小,而其他波长的弥散斑较大。图6 为平面镜设置在550 nm 波长焦面处时像面上的点列图,其中550 nm 波长的弥散斑直径为41.4 μm,小于光纤纤芯直径,而400 nm 波长的弥散斑直径为2311.46 μm,远大于光纤纤芯直径。
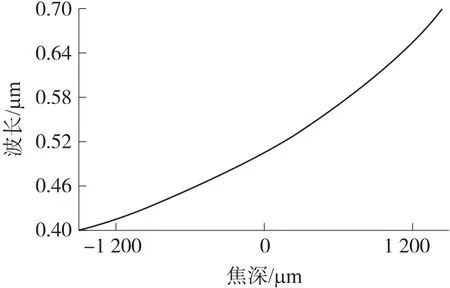
图5 波长与聚焦位置关系
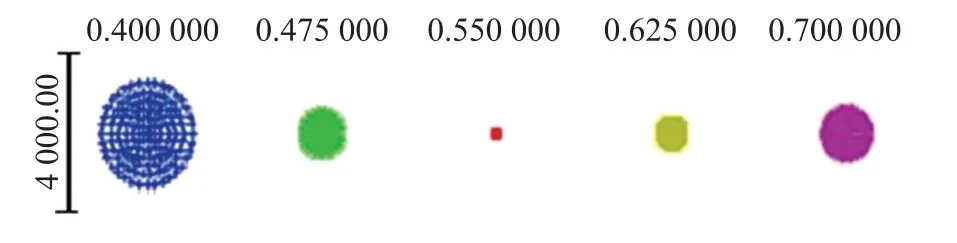
图6 550 nm 波长聚焦时像面上不同波长的点列图(单位:μm)
为了更准确地分析光纤纤芯直径对共焦系统的滤光情况,将光纤端面离散为间距1 nm 的均匀分布点光源,并假设弥散斑与光纤纤芯重叠的部分为可以进入光纤的光。图7 为在此条件下计算的平面镜设置在450 nm,500 nm,550 nm,600 nm,650 nm 焦面处时,反射回光纤的光谱光强分布。从图中可以看出光纤纤芯直径起到了较好的滤光作用,而且随着波长的变大半高宽变大。
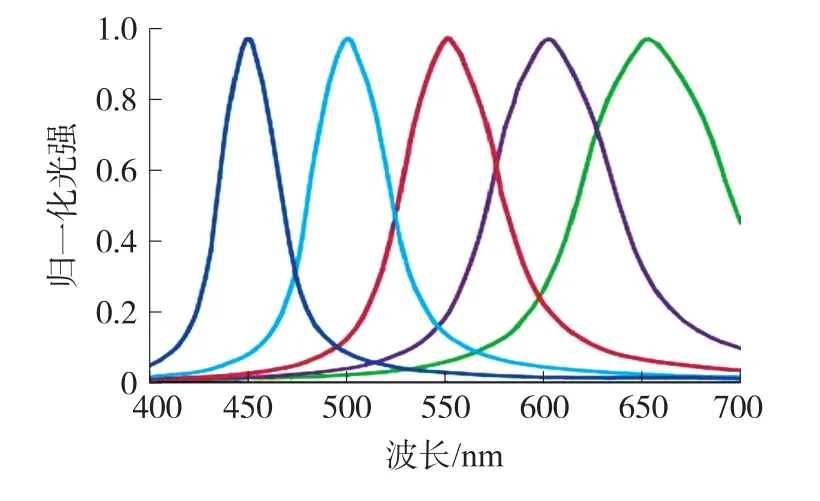
图7 光源光谱光强分布
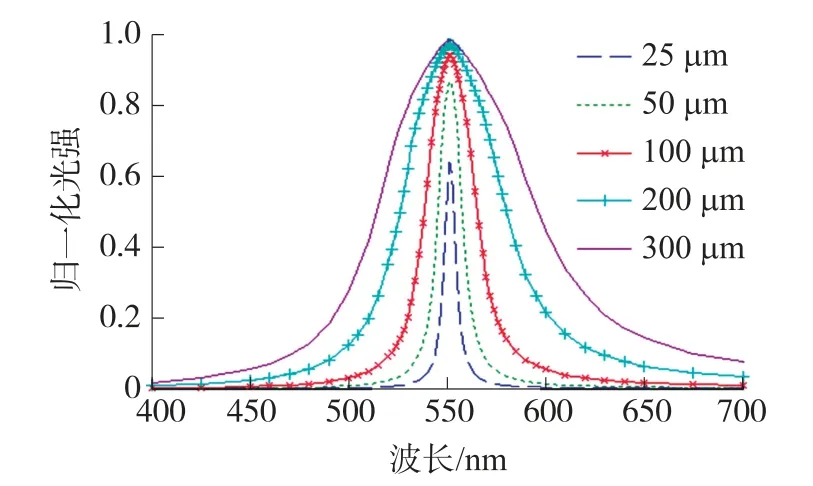
图8 不同纤芯直径下的光谱光强分布
3 光谱数据处理方法研究
光谱信息处理的最终目的是为了得到峰值波长,但是光纤耦合器的内部回光、光源光强分布的不均匀、CCD 对不同波长光响应程度的不同、系统的噪声等因素都会对谱峰定位造成影响,需要进行预处理后再用适当的算法提取峰值波长。
在光谱仪中得到的光谱信息包括光纤内部返回的背景光和从被测物表面返回的信号光。为了得到有用的信号光,首先需要对背景光进行采集,然后从光谱仪得到的数据中减去背景光。此外还要考虑光源光谱光强分布不均匀的影响。图9 为在图7 的基础上加入光源光谱特性后的光谱光强分布图,从图中可以看出峰值波长发生了偏移,所以需要对光源光强进行归一化处理。另外由于传感器在各个环节都会产生随机噪声,所以需要进行光谱去噪,常用的光谱去噪方法有中值滤波、小波函数滤波等[16],比较了不同的滤波方法后,最终选择了用db6 小波进行6 次分解强制消噪,因为经过其滤波处理后谱峰定位的重复性较好。
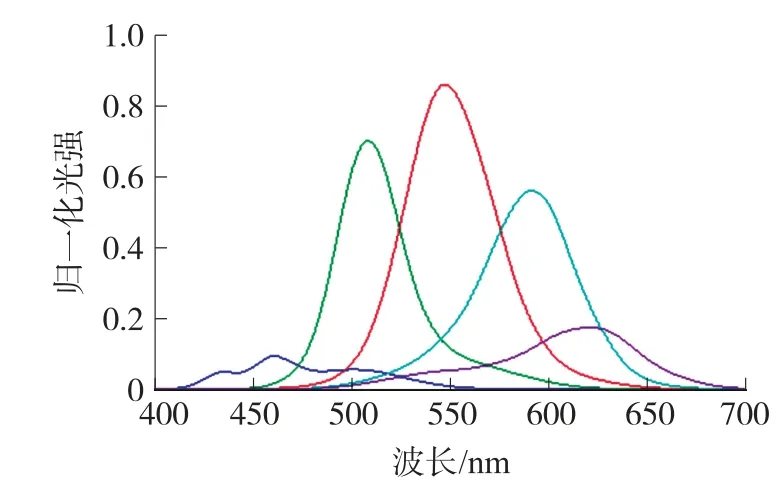
图9 加入光源光谱特性后的光谱光强分布
由于光谱仪中CCD 像元有一定尺寸,相当于对原始的光谱进行了离散采样,所以可能会出现漏峰的情况。如果使用原始光谱数据中的最大值作为峰值波长会影响定位的精度,因此需要选用合适的算法对谱峰位置进行确定。质心法是常用的峰值定位算法[17],适用于处理关于峰值位置对称的光点信号,质心法公式为:
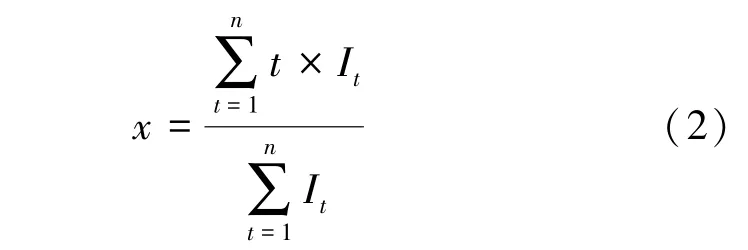
式中:x代表质心位置,t指CCD 上的第t个像元,It代表第t个像元上的灰度值。
4 测量系统实验与结果分析
4.1 实验平台搭建
在光学平台上对设计的光谱共焦位移测量系统进行了搭建,如图10 所示。
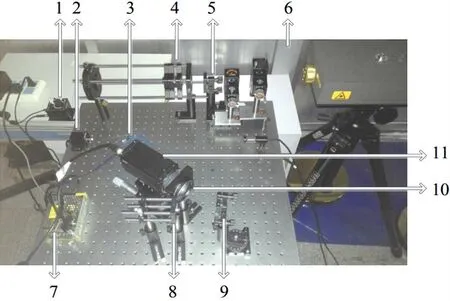
图10 光谱共焦位移测量系统实物图
在CCD 上采集得到的光源光谱光强分布如图11 所示。
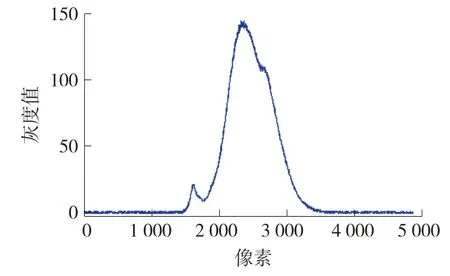
图11 光源光谱光强分布
4.2 系统标定与测量
实验过程采用双频激光干涉仪对系统进行标定,标定时首先选择一个位置作为平面反射镜的初始位置,也是系统标定的起始位置,同时将激光干涉仪的读数在此时清零。然后沿着轴向方向每次给反射镜50 μm 的移动量,对于每个标定点进行5 次信息采集,并记录光谱数据和激光干涉仪的位移值。标定过程中一共对25 个点进行了采集,标定范围为1.2 mm。选取的三个标定点分别为:激光干涉仪位移为0.349 9 mm、0.699 6 mm、1.109 9 mm,此时需要对随机噪声进行去除。
系统采用sym 小波函数7 层强制消噪作为去除随机噪声的方法,采用平方加权质心法作为峰值波长提取的方法。图12 为对上述三个标定点进行滤波处理后并将像素值近似对应到波长值时的光谱光强分布情况。
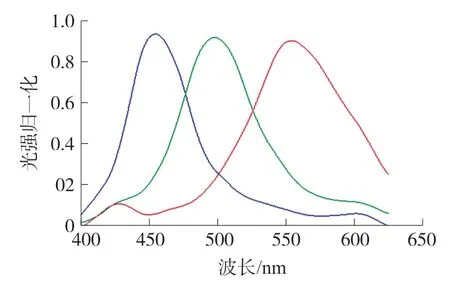
图12 小波函数滤波处理后的光谱光强分布
从图中可以看出,随着峰值波长的变大,光谱带宽变大,与理论结果一致,但是由于进入光谱仪的光源具有一定的宽度,而且分光系统存在像差,所以被测物在不同位置时的光谱带宽与理论仿真相比都进行了一定程度的展宽。
经过平方加权质心法定位后,每个标定点峰值波长的定位重复性如图13 所示,其中横坐标表示每个标定点5 次测量中灰度值最大处的像素平均值,纵坐标表示五次测量中最大像素与最小像素的差。
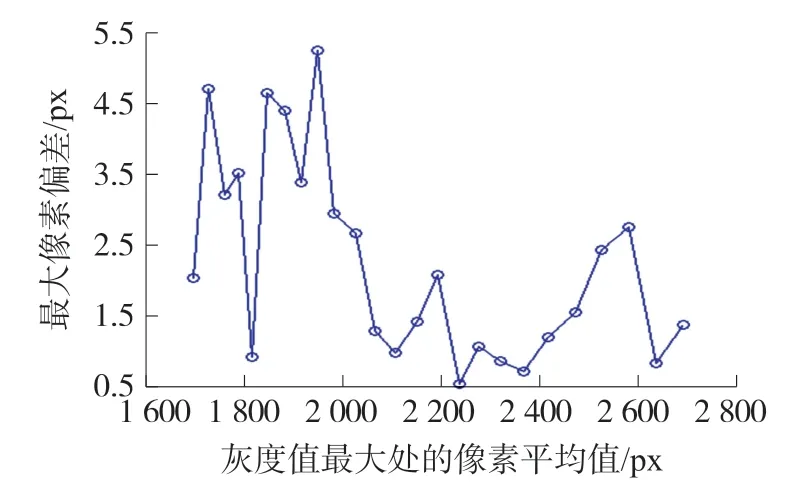
图13 峰值波长定位重复性
为了获得峰值波长和被测物位置间的对应关系,取每个标定点5 次测量中灰度值最大处的像素平均值与对应的激光干涉仪位移值做曲线拟合,经过7 次多项式拟合后的结果如图14 所示,在435 mm~655 nm 波段对应的位移为1.9 mm。

图14 标定曲线
每个标定点的拟合误差如图15 所示,其中最大拟合误差5.3 μm。
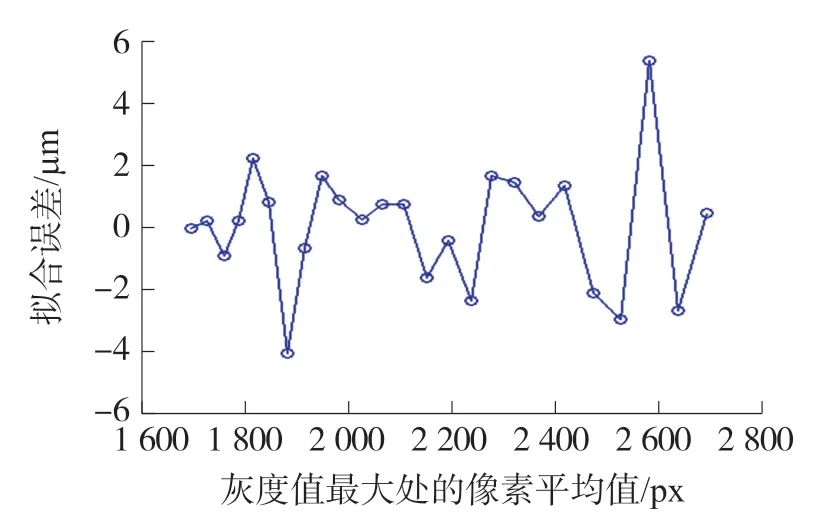
图15 拟合误差
将各个标定点峰值波长对应的像素值代入标定曲线得到系统进行位移量测量时的重复性,如图16所示,平均测量重复性为3.0 μm,最大测量重复性为7.7 μm。
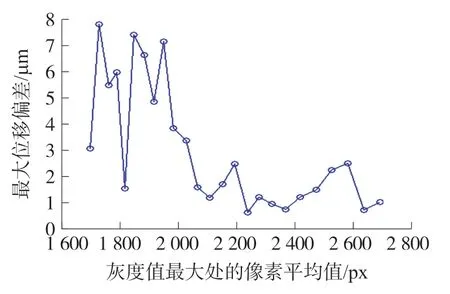
图16 系统测量重复性
更换被测件后对系统进行测量。由于标定过程中激光干涉仪位移在0.850 0 mm 附近处的谱峰定位重复性较好,所以测量时对此位置进行5 次采集,将数据处理后得到的光强最大处的像素取平均值作为系统测量的起始位置,并在此时将激光干涉仪的读数清零。然后在标定范围内随机选择了48 个被测点进行测量。图17 中横坐标表示激光干涉仪的位移值,纵坐标为计算出的位移与激光干涉仪的位移的差,最大测量误差为8.3 μm,平均误差为1.6 μm。
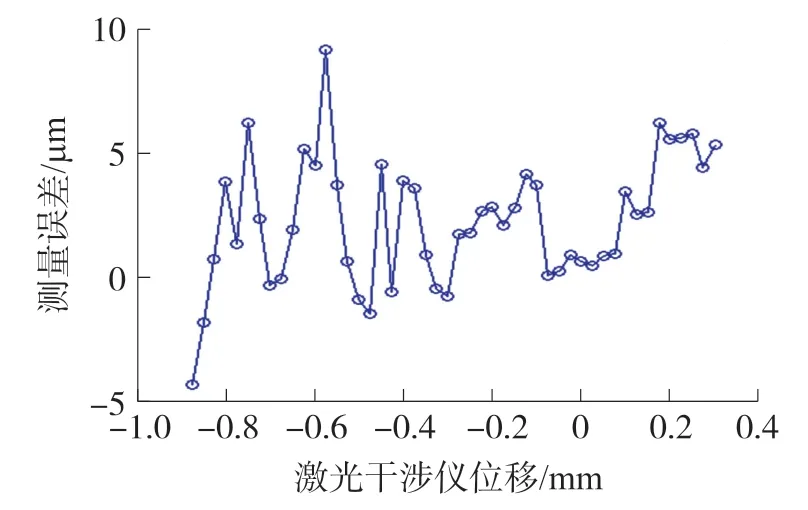
图17 系统测量误差
5 结论
本文设计了基于白光LED 和光纤耦合器式的小型化、低功耗光谱共焦位移传感器。采用ZEMAX仿真软件对设计的色散镜头结构进行了分析,并根据弥散斑的大小对共焦曲线做了理论计算。同时分析了光源特性等因素对谱峰定位造成的影响,通过合适的数据处理方法得到位置和峰值波长间的对应关系。完成了设计系统的搭建,实验结果表明系统在435 nm~655 nm 波段,测量范围1.9 mm,平均测量精度1.6 μm。这对日后研究工作的进一步深入以及样机性能的提高十分有利。
猜你喜欢
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
阅读(科学探秘)(2021年8期)2021-09-01
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2020年10期)2020-11-26
中学生数理化·八年级物理人教版(2019年10期)2019-11-25
中国惯性技术学报(2019年6期)2019-03-04
中国科学院大学学报(2019年1期)2019-01-21
家庭影院技术(2018年10期)2018-11-02