一种绳索驱动的手指康复装置设计
2022-07-12 01:44郑旸初李美琴王文安
科技创新与应用 2022年20期
郑旸初,李美琴,王文安
(温州理工学院 智能制造与电子工程学院,浙江 温州 325035)
随着人口老龄化的增长,老年人身体素质和柔韧性的下降导致了众多疾病的产生,其中中风是典型的疾病之一。在现代医学的帮助下,越来越多的老年人可以在中风后存活,但绝大多数中风患者都伴有不同程度的功能障碍。许多患者由于中风从而导致手指活动能力不足,手指力量缺失[1]。手指作为身体重要的感觉器官,扮演着一个非常重要的角色。因此对于此类患者,手指的康复显得非常重要。相关研究证明手指功能受损的患者积极进行相关功能的康复训练,可以使大脑皮层组织的相关功能进行重组,从而获得比较好的效果。
手指康复训练的发展经过几个时期,自动式康复装置的出现,使得患者可以进行持久的、可控的手部康复训练,并可以通过传感器技术对训练过程中的数据进行检测和采集,并通过数据分析来研究合理的训练模式和评估患者的康复状况。手指康复器主要的驱动方式有刚性结构驱动、绳索驱动、气动驱动、记忆合金驱动等[2],虽然各个研究机构为手指康复提供了一系列装置,但往往结构比较复杂。因此,本文针对手指活动能力不足的患者,提出一种通过指尖驱动整个手指的手指康复器,该装置由一个多关节指套和绳索驱动装置组成,能够实现手指的训练功能。
1 整体结构设计
1.1 指套设计
人的手部结构及运动的复杂程度很高,为了设计一套合理的手指康复装置,需要对手部进行分析,除拇指之外的四指的结构包括掌指关节、近指端关节和远指端关节,掌指关节具有两个自由度。通过查阅相关资料,获得各个手指的长度和运动范围情况[3-4],其中食指近端指节42~51 mm,中间指节25~30 mm,远端指节22~27 mm。手指的运动范围一方面受到骨骼间的韧带和肌肉间的肌腱等生理结构的约束,另一方面也受制于关节与关节之间的耦合运动,比如在手指弯曲的过程中,远指端关节会跟随近指端关节运动,远指端关节和近指端关节很难单独进行运动,而且根据个体的不同,运动情况也有所不同[5-6],手指的运动范围见表1。

表1 手指运动范围
在设计中充分考虑以上两方面的问题,将运动特性与穿戴的舒适性结合。根据手指尺寸范围取中位数,来确定各关节指套的长度。以食指为例,指套的总尺寸为65 mm×27 mm×22 mm。结构为三段式指套,如图1所示,近端指节、中间指节、远端指节通过铰链连接,铰链处的圆盘式阻尼使运动速度更平滑,加速减速平缓。
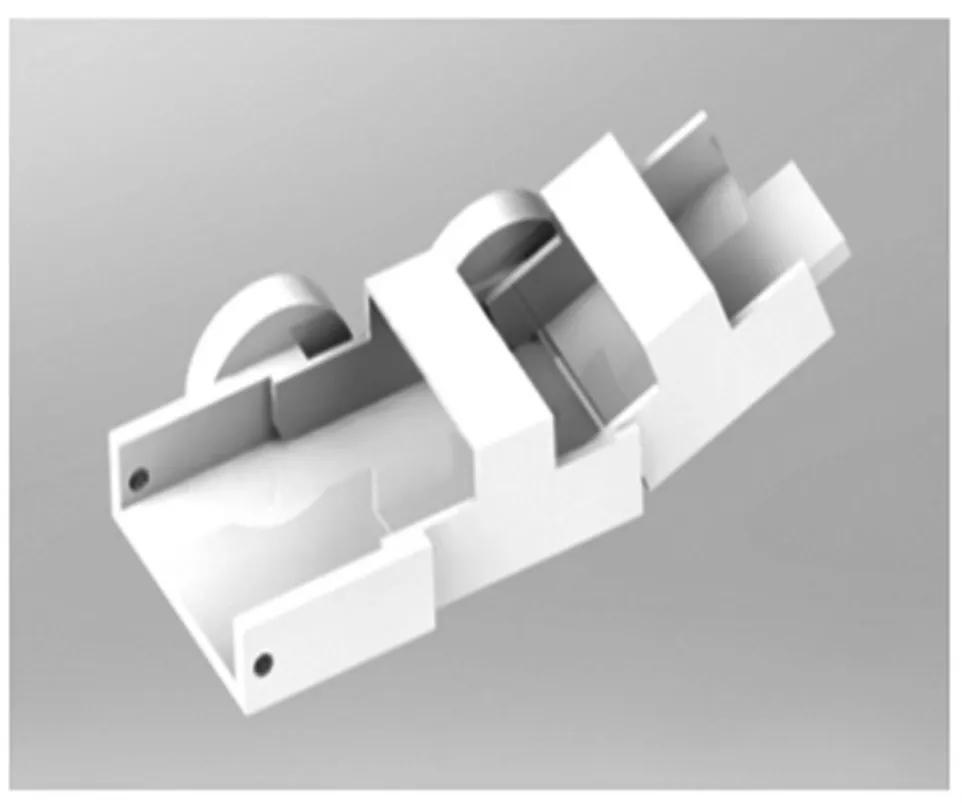
图1 指套结构
1.2 运动空间计算
为了计算手指的运动过程,需要根据关节的长度和关节的角度建立坐标系,从而得到指尖的工作空间信息[7-8]。首先建立一个通用模型,设近端指节长度为L1,中间指节长度为L2,远端指节长度为L3,掌指关节角度为θ1,近指端关节角度为θ2,远指端关节角度为θ3。如图2所示。
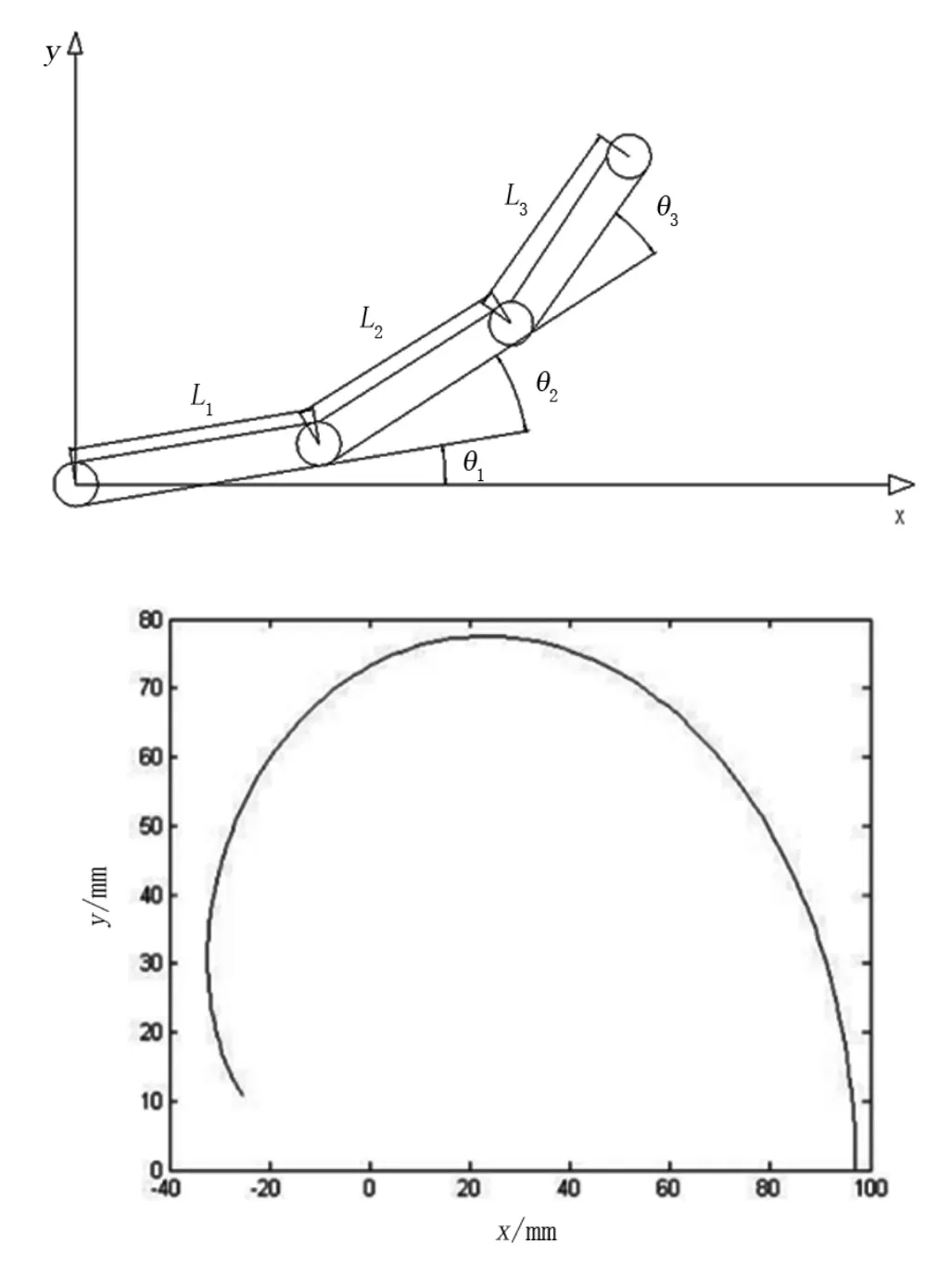
图2 手指结构和指尖运动空间
以手掌中心为坐标原点建立坐标系,其中指尖坐标为:

根据掌指关节、近指端关节和远指端关节的角度限值以及食指的尺寸中位数,计算得到指尖的工作空间。根据工作空间的计算结果,取其中x为0~60 mm的一段曲线设计导向板,从而使手指在合理的范围内进行运动。
1.3 驱动装置设计
本设计采用无刷直流电机作为动力源,无刷直流电机的运转效率、低速转矩、转速精度都很高,并且能够比有刷直流电机力矩控制更加精准。设备包括底座、手腕台和手指运动装置,手指运动装置包括电机支架、电机、绳索、导向板、导向杆、弹簧、指套支架、控制器、三段式指套,结构如图3所示。电机主轴通过绞盘连接绳索,绳索的另一侧连接导向板中的导向杆,导向杆固定连接在指套的端部。当电机主轴向一方向转动时,绳索牵引导向杆移动,从而可使指套卷曲。当电机主轴向另一方向转动时,弹簧用于提供拉力,指套在弹簧的作用下回到初始位置,从而实现往复运动。

图3 整体结构
原型中三段式指套采用TPU材料打印制作,其余结构件采用PLA材料打印制作,指套主要考虑到手指的舒适性因此采用TPU软质材料,实际使用时可以根据使用者的手指尺寸来进行定制。
2 控制部分设计
手指康复装置的控制系统主要包括硬件和软件,其中硬件包括控制器、电机驱动、触摸屏、传感器4个部分,控制器采用树莓派,触摸屏采用的是与树莓派DSI接口适配的5英寸电容屏,电机驱动采用无刷电机驱动器,传感器采用光纤光栅。软件主要分为人机界面和串口通信两部分。人机界面使用pyqt5来制作,界面中包含启动、停止、速度控制等按键。界面上显示锻炼次数和当前的运动速度,以此实现人机交互功能。电机的驱动器以STM32作为主控,采用FOC算法驱动无刷电机,驱动器和树莓派分别进行运动控制和人机交互的任务,运动控制频率高,人机交互界面流畅,两者通过USB接口的方式进行通信。驱动器的FOC算法精确地控制磁场大小与方向,使得电机的运动转矩平稳、噪声小、效率高,配合PID的整定,运行具有高速的动态响应,如图4所示。

图4 控制示意图
串口通信需要设计通信协议,驱动器上通过ch340芯片将USB信号转换成UART信号,为了实现稳定高效的速度控制功能,通信协议必须简洁,因此设计为帧头校验无帧尾校验的模式,驱动器上传数据的帧头采用星号进行校验,因为比较特殊,可以与数字信息进行区分。之后跟上2个字节的锻炼次数信息,之后跟着1个字节的档位,控制器下发数据同样用星号作为帧头,后面设置一个字节的速度档位信息,一个备用字节,见表2。

表2 通信协议
传感器采用光纤光栅检测手指弯曲信号,使用有机硅密封胶分别将2个光纤光栅粘贴在2个指套关节处。光纤光栅将光源入射的光束经由光纤送入调制器,由于光纤光栅在受到应变时,光纤的中心波长会发生变化,因此需要取得中心波长和应变之间的关系式,光纤光栅的中心波长为:
其中,γB为中心波长,neff为纤芯的有效折射率,α为光栅周期,由公式可知中心波长和有效折射率与光栅周期有关,这2个参数的值会受温度和应变的影响。当恒定温度时,中心波长和应变的关系式为:
其中,Pe为有效弹光系数,ε为应变,因此光纤光栅的中心波长的变化率与应变成正比。使用标准拉压力实验台,施加标准压力进行应变和中心波长的标定,因此2个光纤光栅能够分别检测近指端关节和远指端关节的角度。
3 实验测试
实验装置主要由计算机、手指康复装置、稳压电源组成,手指康复器如图5所示,使用稳压电源给驱动器供电,电压为12 V,树莓派直接使用普通5 V电源。触摸屏能够很好地实现人机交互功能,使用时可方便对设备的功能进行设定和调节,使用者也能够方便地从界面上读取锻炼次数和速度档位的数据。
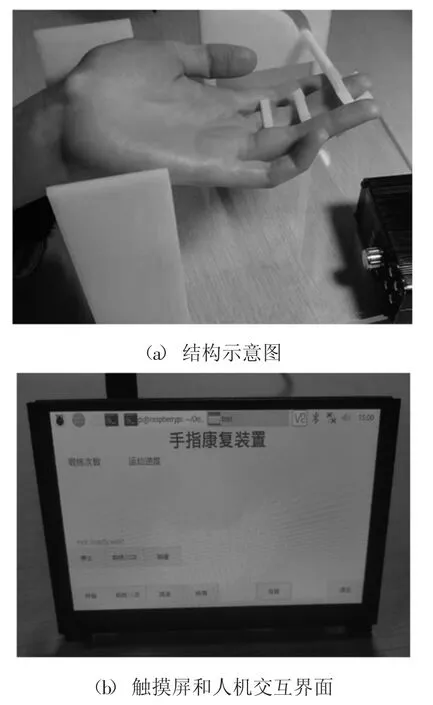
图5 手指康复装置
经过测量,绳索的运动距离约为70 mm。为了实现电机转速和距离的准确控制,用电机配置型号为AS5600的霍尔传感器进行位置测量,霍尔传感器作为非接触式传感器比较适合本设计,通过IIC接口读取12位速度信息,并且通过PID算法实现精确位置控制。考虑到舒适度,运动过程需要避免冲击,因此速度和加速度的变化为正弦波形式的连续波形。
设备的整体框图如图6所示,控制器与驱动器进行串口通信,控制器自身用于人机交互,驱动器与无刷电机、霍尔传感器构成闭环,使用PID算法进行精准控制,无刷电机通过绳索带动指套进行运动,实现手指康复训练,光纤光栅检测弯曲数据通过分析仪解调后将数据发送至电脑端进行分析。

图6 整体框图
4 结束语
本文针对手指活动能力不足的患者,设计了一个通过指尖驱动整个手指的手指康复器。装置使用三段式的指套,该设计方便手指的弯曲和伸展,符合手指关节的运动特性。通过计算得到手指指尖的运动范围,设计导向板滑槽的空间位置,引导手指进行运动,设备配置了人机交互界面,方便使用者对设备进行速度调节和锻炼次数的查看。本设计结构简单,同时指套3D打印个性化定制,为手指活动能力不足的患者提供了一种新的康复训练方式。未来可以使用12 V锂电池进行供电,方便在不同的位置使用。
猜你喜欢
大学物理(2022年7期)2022-07-26
网络安全技术与应用(2022年5期)2022-07-26
作文中学版(2022年12期)2022-02-10
飞天(2020年8期)2020-08-14
电子制作(2019年24期)2019-02-23
科技风(2018年32期)2018-10-21
科技风(2018年30期)2018-07-09
科技风(2018年31期)2018-07-09
中国设备工程(2017年11期)2017-06-29
北方交通(2016年12期)2017-01-15