采煤机截割传动系统动态特性研究
2022-07-14 10:03魏大栋
机械管理开发 2022年6期
魏大栋
(山西科兴能源发展有限公司, 山西 高平 048400)
引言
滚筒采煤机为现代综采工作面的关键综采设备,其在很大程度上提升了工作面的采煤效率,降低了作业人员的劳动强度,提高了工作面的生产安全性。截割部为采煤机的关键部件,其是实现连续采煤的关键部件,传统截割部以多级齿轮的长链传动为主,在实际生产中的故障主要表现为滚筒转速不可调、摇臂容易变形等[1]。本文将重点通过对采煤机截割部滚筒的负载进行分析,并对其在稳态、变载荷,以及突变、不同调速方案下传动系统的动态特性进行研究。
1 采煤机截割滚筒负载分析
在实际生产中,采煤机截割部滚筒将与正常煤层、夹矸煤层及断岩煤层等情况相接触。截割部滚筒上安装有呈不同角度、一定数量的截齿,并配有螺旋叶片和其他部件,依靠截齿与煤层或岩层直接接触实现截割功能,螺旋叶片主要实现装煤功能。从理论上讲,采煤机截割滚筒所承受的负载即为截齿与煤层或岩层接触时所承受的截割力,截割力大小与本身所面临煤层的截割阻抗、截齿工作部分的宽度、截齿对煤层的切削厚度、截齿的排列方式、截齿抗压强度等参数相关。采煤机截割煤层的瞬时切削厚度hij的理论计算公式如式(1)所示:

式中:vq为采煤机的牵引速度;n 为采煤机截割部滚筒的旋转速度;aij为采煤机滚筒上第i 条截线上第j个截齿的圆心角;mi为采煤机滚筒上第i 条截线上截齿的数量;t 为采煤机截割部滚筒的工作时间。
总体来讲,采煤机在连续工作中所面临的工况是十分复杂的,其所承受的载荷情况颇多,包括截割正常煤层时的稳态运行工况,截割夹矸煤层或者断岩煤层时的载荷突变工况。而且,采煤机截割部滚筒所承受的载荷不仅与滚筒的转速相关,而且与工作面条件即煤层的截割阻抗相关,与采煤机的实时牵引速度相关[2]。因此,本文除了对稳态工况和载荷突变工况下截割部传动系统的动态特性进行分析外,还对不同调速方式下传动系统的动态特性进行分析。
2 不同工况下采煤机传动系统动态响应特性分析
本节重点对采煤机在稳态运行工况和载荷突变工况下传动系统的动态响应特性进行分析。根据采煤机截割部滚筒、摇臂内传动系统及截割电机的参数完成截割传动系统的动力学仿真模型,并依据所建立的模型对其在不同工况下传动系统的动态响应特性进行仿真对比研究。
2.1 稳态工况
所谓稳态工况指的是截割部截割的对象为全煤层,近似认为一个全煤层的截割阻抗不变[3],且此时采煤机截割部滚筒的旋转速度为1480 r/min,滚筒所承受的载荷为恒定值,为70 kN·m。在上述条件下,对采煤机截割部传动系统中截割电机和行星轮系的动态响应特性进行分析。
2.1.1 截割电机
稳态工况下,采煤机截割部电机的动态响应特性如图1 所示。

图1 稳态工况下电机动态响应特性
由图1 可知,在稳态运行工况下截割电机转速和电机转矩为恒定值,其中截割电机转速在1480 r/min左右稳定,电机转矩在484.1 N·m 上下波动。
2.1.2 行星轮系
在稳态工况下,采煤机行星轮系的振动情况和输出扭矩的动态响应特性如下页图2 所示。
由图2 可知,采煤机截割部在稳态工况下行星轮系中行星轮的振动加速度在±35 m/s2的范围内波动,相对稳定;此时,行星架的输出扭矩近似于滚筒所承受的载荷,约为70 kN·m。
2.2 重载突变工况
所谓重载突变工况,指的是采煤机滚筒截割夹矸煤层时的工况,该种工况最显著的特点为滚筒所承受的载荷变化幅度较大[4]。此时采煤机截割部滚筒的旋转速度为1480 r/min,滚筒所承受的载荷在7 s 的时刻点从70 kN·m 突变增大为100 kN·m。
2.2.1 截割电机
重载突变工况下,采煤机截割部电机的动态响应特性如图3 所示。

图3 重载突变工况下电机动态响应特性
由图3 可知,在重载突变工况下,7 s 时刻截割电机的转速迅速下降并缓慢逐渐恢复至额定转速1480 r/min;截割电机转矩在重载突变工况下在7 s 时刻迅速增大至滚筒所需克服的载荷。
2.2.2 行星轮系
在重载突变工况下,行星轮系行星架输出扭矩的动态响应特性如图4 所示。
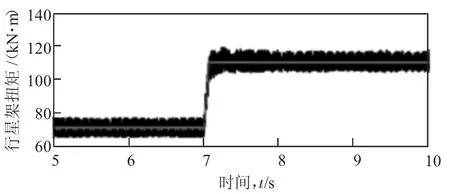
图4 重载突变工况下行星架输出扭矩的动态响应
由图4 可知,在重载突变工况下,由于7 s 时刻载荷发生突变,截割部传动系统行星轮系行星架输出的扭矩迅速增大至100 kN·m,与滚筒所承受的载荷一致。
综上,采煤机截割部传动系统对稳态运行工况和重载突变工况具有较好的适应性。
3 不同顺序调速方案的传统系统动态特性研究
由于采煤机截割部滚筒所承受的载荷不仅与滚筒的转速相关,而且与工作面条件即煤层的截割阻抗相关,与采煤机的实时牵引速度相关[5]。因此,本节对两种不同顺序调速方案对应传动系统的动态特性进行研究。
设定调速对应的工况为重载突变工况,即其截割部所承受的载荷从70 kN·m 增大至100 kN·m。
顺序调速方案一:截割转速在5.5 s 时刻且在1 s的时间内从1150 r/min 增大至1460 r/min,牵引速度在后续1 s 的时间内从5.4 m/min 降低为5 m/min,并且维持1 s 后牵引速度从5 m/min 增大为5.4 m/min。
顺序调速方案二:牵引速度在5.5 s 时刻且在1 s的时间内从5.4 m/min 降低为5 m/min,此状态运行1 s后牵引速度从5 m/min 增大为5.4 m/min;在6.5 s 时刻截割电机转速从1150 r/min 增大至1460 r/min。
上述两种调速方案对应滚筒载荷的变化情况如图5 所示。
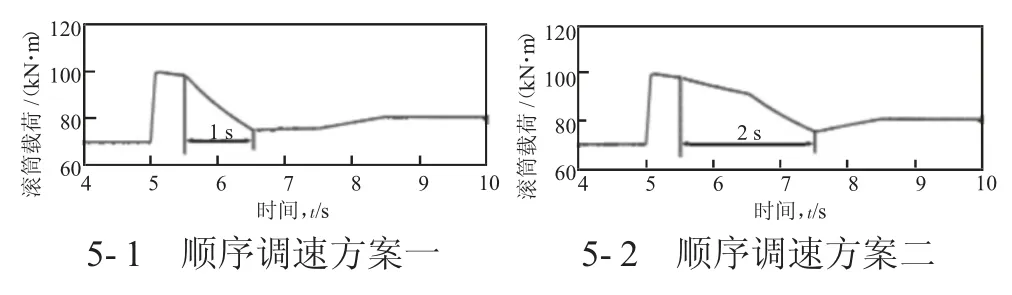
图5 不同调速方案对应的动态特性
由图5 可知,调速方案一的控制在采煤机截割部滚筒比调速方案二少1 s 的情况下即可完成调整,即滚筒在高负载工作的时间小于1 s。由此说明,顺序调速方案一的响应特性优于顺序调速方案二。因此,选择顺序调速方案一对采煤机截割部工作参数进行适应控制。
4 结语
采煤机为综采工作面的关键设备,尤其是截割部为直接与煤层或岩层接触的部件,其所承受的载荷与所接触的介质相关,分为稳态工况和重载突变工况。为保证工作面的生产效率和安全性,保证采煤机截割部在不同工况下工作的适应能力尤为重要。本文验证了基于行星传动轮系的截割部传动系统能够完全适应工作面的复杂工况;同时,采用先调整截割转速后调整牵引速度的顺序调速方案能够获得最佳控制效果,从而提高采煤机对复杂工况的适应能力。
猜你喜欢
中国造纸(2022年8期)2022-11-24
幼儿教育(2022年10期)2022-10-28
青少年科技博览(中学版)(2022年1期)2022-03-28
防爆电机(2022年1期)2022-02-16
一重技术(2021年5期)2022-01-18
幼儿教育·父母孩子版(2021年6期)2021-08-05
河北画报(2021年2期)2021-05-25
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
幼儿教育·教育教学版(2019年9期)2019-02-02