矿井采煤机滚筒高度调节的滑模控制系统研究
2022-07-14 10:03闫志敏
机械管理开发 2022年6期
闫志敏
(晋能控股集团同发东周窑煤业有限公司, 山西 大同 037100)
引言
长壁开采是一种特殊的开采方法,具有较高的煤炭生产率并可保持平稳运行的特点。滚筒采煤机是长壁采煤设备中常用的机械设备。采煤机自动化作为综采工作面的关键设备,其实现自动化的关键是实现滚筒的自动调整。采煤机滚筒高度自动调节的最大问题是如何使采煤机滚筒自动适应煤层顶底的波动,以获得最大的产煤量,尽可能避免切割顶底岩石,保护输送系统,同时又具有高效的经济性和安全性。目前,为了自动适应煤层顶底板的波动,广泛采用了采煤机滚筒记忆切割技术,以避免顶板煤层厚度测量和煤岩界面识别技术等技术难题。本文提出了一种在复杂工况下采用变速指数趋近律的滑动模式控制策略,该策略以记忆采煤机截割信息作为采煤机截割高度的判据,具有较好的快速性、稳定性和准确性[1]。该控制策略不仅可以通过调整和改变控制器结构,有效地克服系统的不确定性和外部负载的干扰,而且可以实现滚筒高度调节的控制,具有快速、稳定、准振动和抖振小的优点。
1 采煤机结构简介
常见的采煤机包含电动机、液压设备和安装在机身的控制装置组成。水平切割滚筒安装在机器的正面,装有切割镐并在平行于工作面的平面内旋转。在切割滚筒旋转时将悬臂推向工作面,并且采煤机沿工作面移动,则它能够切入工作面的整个开采宽度,沿着悬臂伸缩方向移动。一旦完全进入开采面,采煤机可以覆盖至切割面的整个长度范围。
最初设计的采煤机有一个刚性连接到机器主体的单个滚筒,因此具有固定的切割高度,并且必须能够使机器主体的一端越过工作面边缘以切割整个长度。随后的设计发展看到切割滚筒安装在液压操作臂上以改变可能的切割高度,并安装第二个切割滚筒。这种机器被称为“双滚筒采煤机”,几乎是现在使用的唯一类型的采煤机,“采煤机”通常指这种双滚筒式的采煤机。双滚筒布置还允许安装较小的滚筒,同时覆盖更多的开采高度,可以一次切割每个滚筒的接缝部位。
作为两个单独的切割通道,滚筒摇臂允许改变切割高度,提升开采的效率。本文以AGHG-34jH 型采煤机为研究对象,基本结构如图1 所示。整机主要包括截割部、牵引部和中间箱三个部分[2]。

图1 AGHG-34jH 型采煤机结构示意图
2 采煤机滚筒高度调节系统建模
2.1 机- 电- 液多场耦合采煤机高度调节系统
采煤机滚筒高度调节系统主要包括滚筒截割传动机构和高度调节机构。滚筒切割机构由切割马达、齿轮传动系统、滚筒等组成,液压调高机构由驱动马达、控制系统、液压马达和液压缸组成。机- 电- 液耦合滚筒高度调节系统的结构图,如图2 所示。

图2 机- 电- 液耦合滚筒高度调节系统的结构示意图
2.2 增加控制系统传递新路径
采煤机高度调节系统的液压控制电路图,如图3所示。它包括电液比例阀,高度调节泵,高度调节缸和双向液压锁[3]。当采煤机高度调节系统工作时,控制器发射控制电压(系统的输入量),放大后获得电流控制信号,控制节流面积相应改变。从而改变系统的流量来控制调节鼓的运动轨迹和提升速度。位移传感器用于检测气缸活塞的位移,信号被转换并与给定的目标进行比较,控制信号形成闭环控制系统。
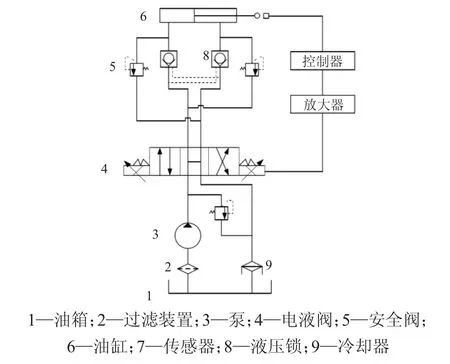
图3 采煤机调高系统液压控制电路
2.3 趋近律滑模控制器设计原则
趋近律滑模控制器的剪切运动状态具有从起始位置到运动面的理想运动特性。滑动模式通常可以确保运动点仅在有限的时间内到达开关表面,并且到达过程没有局限性的规则。设计采煤机趋近律滑模控制系统的基本原则包括两个部分[4]:
1)假设采煤机根据波动系数调整系统的运行时间,使控制过程更加的稳定,具有良好的运动状态和工作效率;
2)设计满足滑动模式可达性条件的滑动模式控制函数,在开关面上形成滑动模式区域,使控制系统更加稳定和精确。
3 趋近律滑动模式控制的仿真分析
3.1 模拟仿真模型的建立
在趋近律滑模控制系统仿真研究中,本文基于Simulink 程序中的系统传递函数建立了仿真模型,并根据仿真结果对系统进行了修改,直到仿真系统的计算性能满足使用的要求[5]。
基于模拟工况的液压仿真模块是Simulink 软件的专业组件。仿真的基础是构建真实部件之间的逻辑组件,建立仿真真实系统,创建仿真框图。建立仿真的物理模型,为了体现真实性,考虑非线性因素,如管道连通性、流体密度、弹性压力、外部压力、库仑压缩等[6],并且根据边界条件选择系统的各种基本组件。在此基础上,根据传递系统的控制功能设计和滑动机构的控制功能,建立了滑动控制机构的仿真模型,如图4 所示。
3.2 仿真结果分析
由图5 所示,趋近律滑模控制和PID 控制在采煤机空载运行以及受到冲击负载条件下处呈现出的波动有所不同。根据图像显示整体控制系统将在2~3 s 内受到外部的载荷冲击,由PID 系统调节下,整体的采煤机运动位移就会发生较大的偏差。然而通过趋近律滑模控制的系统就会将整体的位于曲线趋于稳定。极小范围内发生偏差,不会对采煤机的工作效率造成影响。
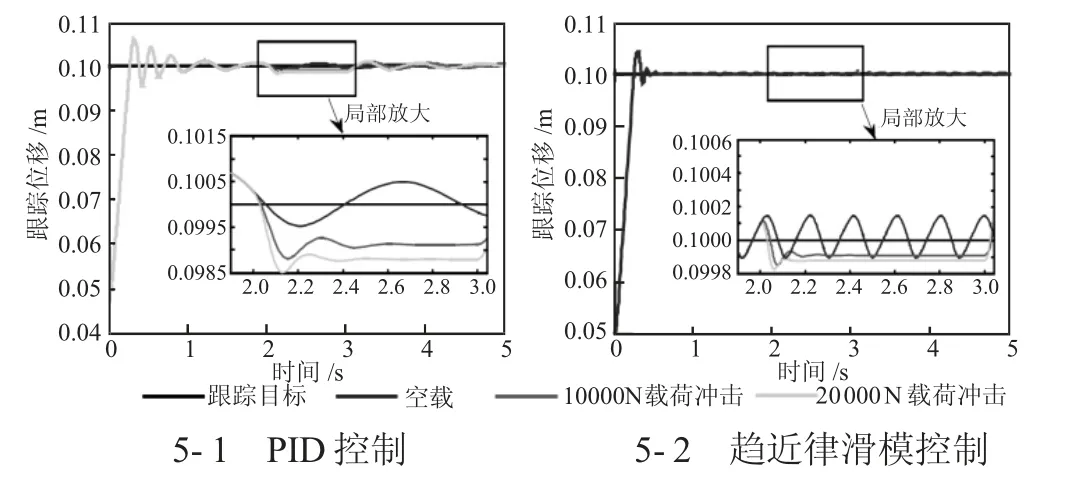
图5 两种控制方法的对比分析
通过软件将数据放大后,可以得趋近律滑模控制系统的波动率仅为PID 控制系统波动率的1/7。趋近律滑模控制系统的调节下,整体的偏差率仅为0.2%。可以得出趋近律滑模控制系对于采煤机外部的冲击载荷有了明显的抑制效果,更加适合在复杂恶劣的矿井中使用,满足了采煤机的调高要求。
由下页图6 可知,趋近律滑模控制比PID 控制在采煤机滚筒受到工作扰动时的变化范围更小。从整体曲线来看,趋近律滑模控制的曲线更为平稳和准确,采煤工作的时候,不会受到过大的载荷波动,保护了自身零部件不受破坏。由图5 和图6 分析得出了趋近律滑模控制车控制的抗干扰能力更强,更能满足现代化采煤机工况的工作需求。

图6 不同控制方法下滚筒负载曲线
4 结语
采煤机工作环境恶劣,重负荷突变条件下存在外部负荷干扰。对于电液比例伺服系统的液压调节系统,使用传统的PID 控制很难实现快速准确的控制。本文建立了采煤机高度调节缸的模型,比较分析了基于趋近律的滚筒高度调节滑动模式控制方法与传统PID 控制方法的控制效果。结果表明,与传统的PID控制相比,采用趋近律的滚子高度调节系统的滑动模式控制具有更强的抗干扰能力;采用变速趋近律提出的滑动模式控制策略不仅能实现液压调高系统的快速、稳定、精确的调高控制,而且能有效克服系统的不确定性和外部负载扰动的影响,其对复杂工况具有很强的适应性,能有效抑制传统控制系统条件下的抖振。
猜你喜欢
钢管(2022年2期)2022-11-28
幼儿教育(2022年10期)2022-10-28
防爆电机(2022年1期)2022-02-16
幼儿教育·父母孩子版(2021年6期)2021-08-05
河北画报(2021年2期)2021-05-25
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
电子制作(2019年10期)2019-06-17
幼儿教育·教育教学版(2019年9期)2019-02-02
意林(绘英语)(2018年1期)2018-04-28