综采工作面液压支架控制系统优化设计
2022-07-14 10:04李瑞龙
机械管理开发 2022年6期
李瑞龙
(山西焦煤集团官地煤矿, 山西 太原 030024)
引言
液压支架是煤矿综采工作面安全支护的重要设备,为了减少工人数量、降低劳动强度、提高安全生产,必须利用液压支架电液控制系统,实现液压支架的统一有序控制和动作。但由于进口液压支架电压控制系统存在供货不及时、升级困难、缺乏自动控制和自诊断功能等缺点,而国内现有液压支架电液控制系统存在可靠性低、控制实时性差、抗干扰能力弱等缺点[1-3],所以,亟待研究并开发高可靠性、高实时性,满足综采工作面生产需求的液压支架电液控制系统,适应综采工作面智能化、信息化和少人化的需求。本文以综采工作面液压支架为研究对象,深入研究液压支架结构、功能和控制工艺,提出液压支架电液控制系统硬件设计、软件设计及人机界面显示屏设计,为实现液压支架控制的智能化、少人化奠定基础。
1 液压支架控制系统硬件设计
综采工作面液压支架控制系统优化方案硬件设计结构如图1 所示,该优化方案更换通信能力强、处理速度快、响应时间短的EPEC 3724 控制器为核心CPU,根据液压支架控制的数字量、模拟量进行I/O 点分配。优化后的液压支架控制器需采集的模拟量有压力传感器数据,具体包括每一台液压支架的伸缩油缸压力、立柱升降油缸压力、推溜油缸压力等,输出信号为-10~10 V 电压信号,传送给EPEC 3724 控制器完成模数处理。位移传感器用于采集推溜油缸位移、立柱油缸位移,输出信号为0~10 V 电压信号。红外传感器用于定位采煤机位置,即在液压支架横梁中心位置安装红外传感器发送单元,在采煤机机身位置安装红外传感器接收单元,采煤机根据接收到的红外传感器信号确认对应的液压支架编号,进而确认自身实时位置[4-6]。EPEC 3724 控制器支持PWM信号输出,即对控制液压支架油缸伸缩、底座抬放、护帮伸收及推溜的电磁阀直接控制,实时性强、控制效果好。对液压支架进行控制时,需在人机界面上完成,EPEC 3724以CAN 总线通信方式将液压支架动作时的所有数据上传至人机界面,同时接收人机界面的控制指令。优化后的液压支架控制系统上位机监控平台用于监视、查看液压支架运行数据、故障信息等。
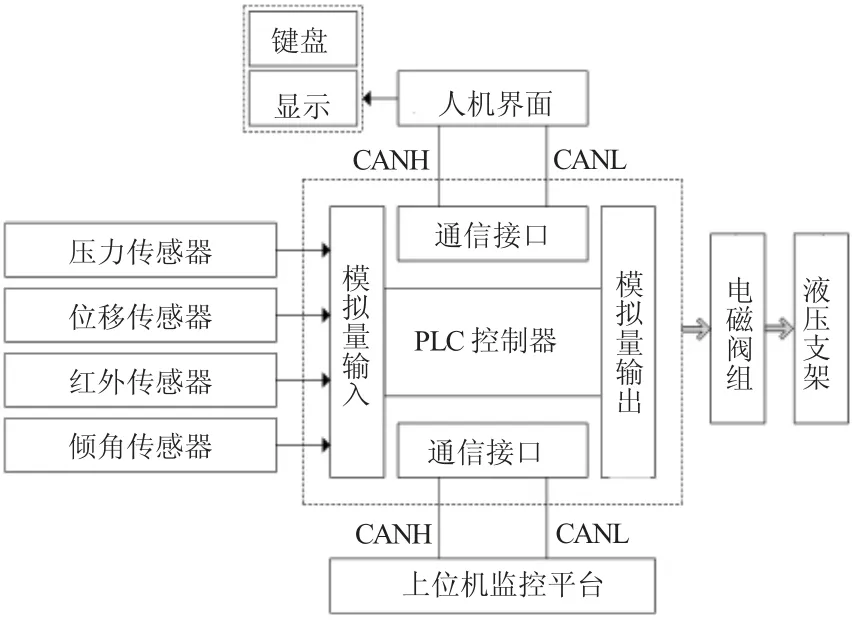
图1 液压支架电液控制系统硬件结构
优化后的液压支架控制系统EPEC 控制器端口地址分配如下页表1 所示,在进行软件实现时,需根据表1 地址分配完成。

表1 液压支架控制器优化方案EPEC 控制器端口地址统计
2 液压支架控制系统软件设计
2.1 PLC 程序
液压支架电液控制系统软件分为支架控制器主站软件和支架控制器从站软件两部分,其软件框架如下页图2 所示。支架控制器主站软件主要包括通信设计、动作设计两部分。支架控制器主站以TCP/IP 通信模式与地面控制室进行数据传输,以CAN 通信模式与支架控制器从站进行数据传输,因此,设计基于改进型分时复用的TCP/IP 通信方案,以解决传统TCP/IP 通信方案存在的数据拥塞、碰撞现象,提高传输数据的实时性[7-8]。对支架控制器主站传输的非周期性数据,设计基于动态优先级的CAN 通信方案,从而解决现有CAN 通信方案存在的CAN 总线数据竞争问题,以满足CAN 通信数据的实时性要求。根据液压支架电液控制系统控制要求,支架控制器主站动作设计主要包括邻架控制、成组控制及远程控制。支架控制器从站软件设计与支架控制器主站软件设计类似,在通信设计中,包含对传感器等周期性数据的静态CAN 通信方案;在动作设计中,还包括本架推溜。
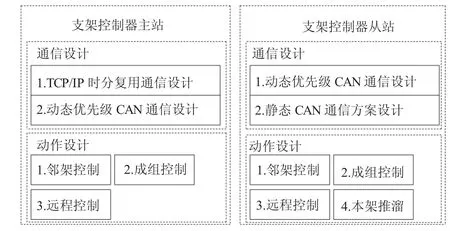
图2 液压支架电液控制系统软件框架
2.2 HMI 人机界面
综采工作面液压支架控制系统优化方案人机界面用于支架工完成对液压支架的控制,设计有主菜单、邻架菜单、成组菜单、推溜菜单、参数设计及错误报警六个界面,如图3 所示。EPEC 3724 控制器将液压支架动作时的所有数据经CAN 总线通信传输至人机界面。人机界面接收到数据按照已经定义的CAN总线通信协议进行解析并实时显示,同时支架工按下控制指令后,经CAN 总线通信协议传送至EPEC 3724 控制器并完成对液压支架的控制。
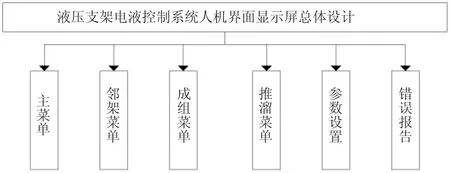
图3 综采工作面液压支架控制系统优化方案人机界面
3 试验验证
为验证优化后的综采工作面液压支架控制系统的正确性和可靠性,在实验室完成液压支架控制系统功能试验。将实验室内的20 台液压支架控制系统以CAN 总线通信方式进行连接,分别控制20 台液压支架,控制模式主要有单机控制、成组控制、邻架控制以及自动跟机等。同时还需试验验证压力、位移、红外等传感器的信号采集、处理及逻辑控制。图4 所示为邻架联动控制时LED 显示屏展示的液压支架控制系统状态,联动动作为“降- 移- 升”,当前采煤机运行方向为正向、立柱压力为20 MPa(200 bar)。图5 所示为液压支架成组控制过程,当前执行动作的液压支架架号为3。该试验基于CoDeSys 平台,并结合人机界面LED 显示完成PLC 控制器开关量输入、输出点测试、PLC 控制器模拟量输入输出点、液压支架邻架控制、液压支架成组控制、推溜动作、急停闭锁、参数调整及错误报警测试,验证了所研究开发的液压支架电液控制系统的正确性。

图4 邻架联动控制

图5 成组控制
4 结语
1)设计以EPEC 3724 控制器为核心的液压支架控制系统优化方案,给出详细的硬件、软件设计;
2)实现了液压支架单机、成组、联动、自动跟机等多种控制模式,满足综采工作面液压支架控制需求;
3)设计液压支架控制系统HMI 人机界面,增强了液压支架控制系统的可视性和可操作性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
电子乐园·下旬刊(2021年3期)2021-02-08
宝藏(2020年1期)2020-10-14
铁道通信信号(2020年4期)2020-09-21
大陆桥视野·上(2019年11期)2019-12-17
网络安全和信息化(2019年8期)2019-08-28
汽车文摘(2019年3期)2019-03-04
电子技术与软件工程(2017年19期)2017-11-09
专用汽车(2016年4期)2016-03-01