小直径土压平衡盾构机的皮带自动纠偏控制
2022-07-22 22:54李武峰
今日自动化 2022年5期
李武峰



[摘 要]针对小直径土压平衡盾构机在转弯过程中出现皮带跑偏问题,设计了一种可使盾构机皮带在连续转弯过程中进行自动纠偏的机构及控制方法,主要用于小直径隧道施工作业中对皮带机皮带跑偏进行动态纠偏。该皮带自动纠偏机构及控制方法可对盾构机的皮带进行自动纠偏,减少作业人员在狭小空间内人工纠偏皮带的困难,提高了皮带机纠偏效率,降低了安全
风险。
[关键词]皮带机;自动纠偏;盾构机;皮带自动纠偏系统
[中图分类号]U231 [文献标志码]A [文章编号]2095–6487(2022)05–000–03
Automatic Belt Correction Control of Small Diameter
Earth Pressure Balance Shield Machine
Li Wu-feng
[Abstract]Aiming at the problem of belt deviation in the turning process of small-diameter earth pressure balance shield machine, a mechanism and control method that can automatically correct the belt of the shield machine during continuous turning are designed. During the tunnel construction operation, the deviation of the belt conveyor belt is dynamically corrected. The belt automatic rectification mechanism and control method can automatically rectify the belt of the shield machine, reduce the difficulty of manual rectification of the belt in a narrow space, improve the rectification efficiency of the belt conveyor, and reduce the safety risk of personnel manual operation.
[Keywords]belt conveyor; automatic deviation correction; shield machine; belt automatic deviation correction system
随着经济的快速发展,城市规模的日益增大,目前我国越来越多的城市主排污隧道或电缆隧道开始采用盾构法施工。由于城市主供水或排污隧道以及电力隧道直径一般只有3m左右,多采用小直径土压平衡盾构机进行隧道施工。盾构机在转弯施工过程中,因皮带频繁跑偏导致系统跑偏报警急停,严重影响整机的正常施工,导致施工效率降低及工期延长。如何解决小直径土压平衡盾构机的皮带快速纠偏成为小直径土压盾构施工中急需解决的工程施工问题,针对该问题设计了一种皮带机的自动纠偏控制机构及控制方法,可解决该工程施工急需解决的皮带自动纠偏问题。
1 皮带跑偏的危害及常用纠偏措施
皮带输送机用于将螺旋输送机尾部出渣口排出的渣土传送到渣车上,一般布置在盾构机后配套台车的顶部,皮带卸渣口设置在尾部台车顶部,它主要由头部调向滚筒、尾部驱动滚筒、上托辊、下托辊、清扫器、速度检测装置、拉绳急停开关、跑偏开关等部件组成。
1.1 皮带跑偏的原因
皮带跑偏的主要原因有:
(1)皮带接头不平直,导致皮带两边周长不等,张力不均,皮带始终往一边跑偏;
(2)接渣槽两侧的橡胶压板不均,导致皮带两边的运行阻力不一致;
(3)所在机械机构不直,如设备正在转弯;
(4)运行过程中,滚筒局部粘连渣土,皮带张紧力不均;
(5)螺旋机后闸门出渣口落渣不均;
(6)皮带老化變形边缘磨损,造成皮带拉力分布不均。
1.2 皮带跑偏的危害
盾构机皮带跑偏现象在盾构隧道施工中非常常见。皮带跑偏轻则会造成沿机掉渣、加速皮带的磨损、严重时还会造成皮带的撕裂、刮破,甚至使皮带报废,对设备安全运行构成很大危害。由于在皮带输送机系统中,皮带兼具承载和牵引功能,其成本约占输送机整机总成本的1/3,皮带使用寿命的长短直接关系到输送机的运营成本,皮带长时间跑偏,如不及时处理将会导致皮带与侧边的导向挡轮接触,造成输送带侧边磨损,减少使用寿命,造成经济损失。
1.3 皮带机跑偏的常见处理措施
目前盾构机的皮带机皮带纠偏方式多采用人工手动调整,当盾构机右转弯时,抬高输送带内曲线,利用输送带和渣土的重力产生向外的离心推力平衡向心力。通过皮带输送机侧面的调整机构使整个皮带支架中心线与竖直线产生倾斜角,实现皮带输送机调偏功能。将转弯处托辊组的内侧沿皮带运行方向前移,使托辊组的轴线与输送带中心线的法线方向产生一定角度,辅助皮带输送机跑偏。
2 小直径盾构机皮带人工纠偏难题
皮带机的皮带纠偏无人化一直是盾构隧道施工中众多施工单位的目标,尤其是在小直径土压平衡盾构施工环境中。面对需频繁纠偏的皮带机,目前多数盾构施工现场都是安排专职设备维保工24h值守,随时准备调整皮带机。大直径盾构机皮带机沿线两侧空间富裕,其后配套皮带机大多采用人工手动纠偏的方式,而在小直径盾构隧道施工过程中因盾构机后配套台车顶部作业空间过于狭小,人员作业困难。皮带频繁跑偏需要岗位人员及时调整皮带托架或托辊,由于隧道曲率不停变化、渣土在皮带上有粘连、刮渣不彻底、托辊黏结等原因,易造成刚调整后的皮带来回跑偏,岗位人员需要在整条皮带沿线来回奔跑作业,人员劳动强度较大,调整困难,难以确保皮带长周期稳定运行,采用人工纠偏既浪费人力又对作业人员人身安全造成极大威胁。
3 皮带自动纠偏机构组成
设计了一种皮带自动纠偏机构及控制方法。在原手动调节的基础上将皮带机的手动调节机构改为油缸控制,通过跑偏开关检测皮带的跑偏情况将跑偏信号传入PLC控制系统,控制系统通过逻辑分析发出纠偏油缸控制指令,纠偏油缸驱动皮带机架和皮带托辊做出相应的姿势调整,从而实现皮带的跑偏自动调整。本皮带机自动纠偏系统由机械结构单元、液压驱动系统、电气控制系统等组成。
3.1 机械结构单元
机械结构主要由皮带机机架、皮带托辊、托辊调整架、机架左右倾斜旋转装置等组成。其纠偏总体结构如图1示。在皮带机自动纠偏装置附近装有皮带跑偏检测开关。皮带跑偏检测开关内部有电气检测触点,用于皮带机的跑偏检测。当运行中的皮带机发生跑偏时,皮带边缘带动跑偏开关的立辊旋转并挤压立棍使之倾斜,若立辊倾斜角度大于开关的动作角度时,跑偏开关的跑偏触点立即发出开关动作信号并传给PLC控制系统。皮带跑偏故障恢复正常后,跑偏开关自动复位。
3.2 液压驱动系统
皮带自动纠偏系统的液压部分主要由液压泵、侧倾调节油缸、平移调节油缸、液压换向阀、液压节流阀、液压油管和液压油箱等组成。液压系统采用盾构机辅助系统的辅助泵供油,当需要对油缸进行控制时,由辅助泵通过节流阀和换向阀对倾斜调节油缸和平移调节油缸进行供油驱动,用于对皮带的动态自动纠偏控制。为避免油路泄压在液压油缸上设置有液压锁。为了避免因动作过快导致程序自动纠偏震荡,在液压管路上设置有液压节流阀,可根据油缸行程调节实际情况合理调整节流阀开度大小,以延长每次动态调整时的液压油缸动作时间。
3.3 电气控制系统
电气控制系统包括跑偏检测开关、行程传感器、PLC子站、电磁阀、中间继电器和HMI人机显示界面等。PLC控制器采用西门子S7-1500的系列PLC,信号输入输出采用ET200SP子站进行采集或输出。跑偏检测开关将皮带跑偏信号实时传入PLC控制系统,由PLC控制系统根据跑偏信号和油缸行程信号进行逻辑运算,驱动侧倾调节油缸和平移调节油缸动作,从而完成相应纠偏动作。
在整个皮带机的2/5和3/5和4/5位置分别布置一套自动纠偏装置,用于皮带机的分段独立自动纠偏以满足皮带机不同位置的自动纠偏控制。
4 皮带机自动纠偏控制原理
4.1 工作原理
纠偏装置由侧倾调节机构和平移调节机构组成。侧倾调节机构主要调节皮带机的左右侧倾角,通过在皮带机架上安装带内置行程检测的液压油缸,调节机架侧倾角度并将油缸伸出长度实时检测并反馈回PLC控制系统。平移调节机构主要调节皮带托辊相对皮带的前后倾斜度,平移托辊调节架一端采用轴连接与机架固定,通过内置行程传感器的液压油缸驱动并将油缸伸出长度实时检测反馈回PLC控制系统。
PLC控制系统根据实时检测的皮带跑偏信号状态。当PLC控制系统检测到跑偏信号后,根据跑偏报警持续时间并查询程序预设的“跑偏报警及油缸行程调节模糊控制规格表”输出控制信号,分别控制相应的电磁阀并驱动液压油缸完成相应的动作行程。由于采用油缸动作行程模糊控制的策略,当油缸目标行程与预设目标行程差在一定范围内,可忽略油缸动作行程偏差。通过调整侧倾调节油缸和平移调节油缸的伸出量实现皮带机支架的左右倾角和托辊架的前后倾斜角调整,满足皮带机在转弯工况下的自动纠偏需要。
4.2 油缸行程控制
皮带纠偏由机架左右侧倾调节和托辊架前后平移调节两种方式配合完成。两调节机构的油缸目标调节行程采用模糊控制的方式,通过查询模糊控制表并对油行程进行自动控制。跑偏报警信号及油缸行程调节模糊控制规格如表1所示。
4.3 控制流程
跑偏控制:系统启动后,先执行初始化程序,将CQ和PY油缸回至初始行程S0和M0位置,然后运行皮带机自动纠偏程序。当跑偏开关检测到皮带跑偏信号后传递给PLC控制系统,PLC控制系统经过逻辑分析判断,通过间歇性的输出纠偏油缸动作控制信号,纠偏控制信号控制液压电磁阀驱动纠偏油缸,纠偏油缸驱动皮带机纠偏机构沿固定轴进行预设量的转动。油缸内置行程传感器实时显示纠偏动作行程量,并在主控室的上位机皮带机控制界面进行显示。当皮带跑偏报警信息消失后,停止皮带机纠偏动作,程序循环,待下次继续监测到新的皮带跑偏信号后,继续下一循环纠偏控制。由于采用了间歇纠偏的方式分时段对皮带机进行纠偏,避免了纠偏调节机构对输送皮带纠偏后存在滞后现象对纠偏产生的影响,解决皮带机采用自动纠偏容易因系统滞后带来的频繁纠偏过度问题。其控制流程图如图2所示。
4.4 人机界面
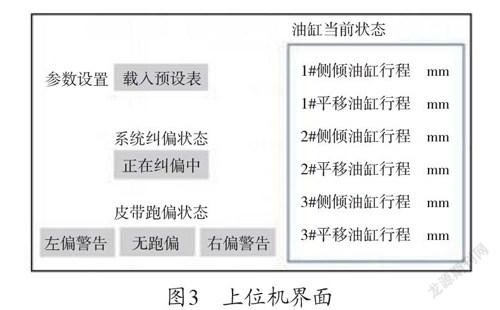
在主控室的上位机上设置有一个皮带机控制界面,如图3所示,可以实时查看皮带跑偏状态、系统纠偏状态、载入预设表和油缸当前伸出状态。
皮带跑偏状态:实时显示皮带的跑偏状态,当皮带左跑偏报警时,“左偏警告”显示红色,“右偏警告”和“无跑偏”显示灰色;当皮带机右跑偏报警时,“右偏警告”显示红色,“左偏警告”和“无跑偏”显示灰色;当皮带无跑偏报警时,“无跑偏”显示绿色,“左偏警告”和“右偏警告”显示灰色。
系统纠偏状态:当系统处于纠偏状态时,“正在纠偏中”显示绿色,当系统未纠偏时,“正在纠偏中”显示灰色。
参数设置:点击“载入预设表”可以载入由用户自定义的模糊控制规则表。
油缸当前状态:实时显示每个纠偏油缸的当前伸出行程。
5 结语
该皮带自动纠偏机构及控制方法解决了小直径盾构机后配套皮带机的皮带跑偏问题,能够保证皮带输送机的安全可靠运行,满足小直径盾构机皮带在转弯时的纠偏要求。本皮带自动纠偏控制机构及控制方法通过实时监测皮带跑偏状态及跑偏报警持续时长,并根据预设控制逻辑对皮带跑偏进行自动动态纠偏控制。相比盾构机后配套皮带传统的人工纠偏作业,极大地降低了皮带人工纠偏工作量,减少了人工值守维护成本,节省了人力和保障人身安全。该皮带自动纠偏机构及控制方法可以在空间狭小环境恶劣的工况下正常工作,环境适应性强,省时省力安全高效,具有明显的经济效益,亦可用于其他皮带机工况下的自动纠偏需求。
参考文献
[1] 邓蕊.可伸缩皮带运输机胶带跑偏原因分析及纠偏措施[J].天津冶金,2014(1):38-41.
[2] 郇龙飞,姚李威,梁义维,等.皮带机自移机尾自动纠偏的模糊PD算法研究[J].中国农机化学报,2015,36(1):282-284.
[3] 张伟,陈欣.新型全自动皮带纠偏装置的应用[J].城市建设理论研究(电子版),2014(17):548.
[4] 劉军民,张焕田.新的皮带机纠偏技术研究与应用[J].港口装卸,2005(5):102-104.
猜你喜欢
今日自动化(2021年2期)2021-10-14
科技信息(2021年7期)2021-02-28
装备维修技术(2020年10期)2020-11-19
科学与财富(2019年15期)2019-10-21
魅力中国(2017年2期)2017-05-13
科学与财富(2017年5期)2017-03-17
大陆桥视野·下(2017年1期)2017-03-09
科技创新与应用(2016年35期)2017-02-21
无线互联科技(2015年15期)2016-03-05
企业文化·中旬刊(2015年8期)2015-08-11