
车辆变权重多目标自适应巡航控制
2022-07-22 14:08姜顺明王奕轩吴朋朋
重庆理工大学学报(自然科学) 2022年6期
姜顺明,王奕轩,吴朋朋
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
0 引言
在目前自适应巡航(adaptive cruise control,ACC)系统控制算法的研究中,主要有动态规划控制(dynamic programming,DP)、滑膜控制(sliding mode control,SMC)以及经典PID控制等,多以安全性和跟车性为控制目标而忽视了经济性和舒适性的需求,难以满足各种复杂工况下的多目标需求。目前,由于模型预测控制(model predictive control,MPC)具有预测模型、滚动优化和反馈校正等优点,可以很好地兼顾多个控制目标需求以及控制约束,因此得到了广泛运用。
陈涛等[1]考虑驾驶风格对安全距离的影响,根据驾驶风格调节速度、加速度和相对距离,提升了一定的舒适性。冷姚等[2]根据行驶工况设计4种ACC控制模式,采用二次最优控制理论,考虑多目标优化,能够在复杂工况下完成跟踪控制。Yang 等[3]针对坡道工况油耗利用率低和弯道易打滑的问题,提出一种多工况适应性自适应巡航架构,有效地提升了系统在坡道工况下的经济性和弯道工况下的安全性。张亮修等[4]综合考虑车辆跟车时的跟车性、燃油经济性、驾乘人员舒适性和安全性,最终求解带约束的二次规划问题。李旗等[5]在控制目标的权重调整中,通过分析车辆间的危险程度,采用模糊推理实现变权重设计。章军辉等[6]在控制目标的权重调整方面,通过调整待优化目标与控制输入权重,将ACC系统分出6种工作模式,同样采用模糊推理与加速度加权平均策略。魏洪贵等[7]使用高斯朴素贝叶斯算法预测前方车辆未来行为,进而调整权重参数。姜顺明等[8]针对城市、城郊和公路3种工况将跟车性和经济性进行加权作为目标函数。
综上所述,多目标优化主要分为固定权重和变权重两类:第一类针对自车行驶工况或前车驾驶行为的变化分别设计不同的控制模式,一定程度上能够提升各目标性能,但适用范围有限,难以应对各类复杂工况。第二类采用变权重,权重系数可随工况的变化而灵活地变化,但大多采用模糊控制思想,主观性较强,无法体现不同复杂工况的客观规律。为此,本文基于模型预测控制原理,结合一种基于熵权法的权重在线调优方法[9],避免以往根据经验赋予权重而导致主观性太强。此方法根据行车环境的变化客观实时地计算出城市、城郊和公路3种工况下的跟车性、经济性以及舒适性各权重系数的变化趋势,充分协调各子目标之间的关系。最后,结合Simulink的动力学模型和CarSim车辆模型进行仿真验证。
1 安全车距模型
由于CTH算法减少了复杂度且相对稳定可靠,故用CTH算法作为安全车间距模型[10],如式(1)示:
ddes=τhvh+d0
(1)
式中:ddes为自车与跟随车辆的期望车间距;τh为车间时距;d0为两车相对最小的安全距离。
2 ACC系统车间纵向动力学模型
本文将车间距、车速误差、自车车速以及自车加速度作为状态向量,构建车辆纵向动力学模型,并将前车加速度作为本系统的外部扰动。所建立的纵向动力学模型能完整真实地反映车辆间的运动变化规律,可靠性较高。车辆行驶运动如图1所示。
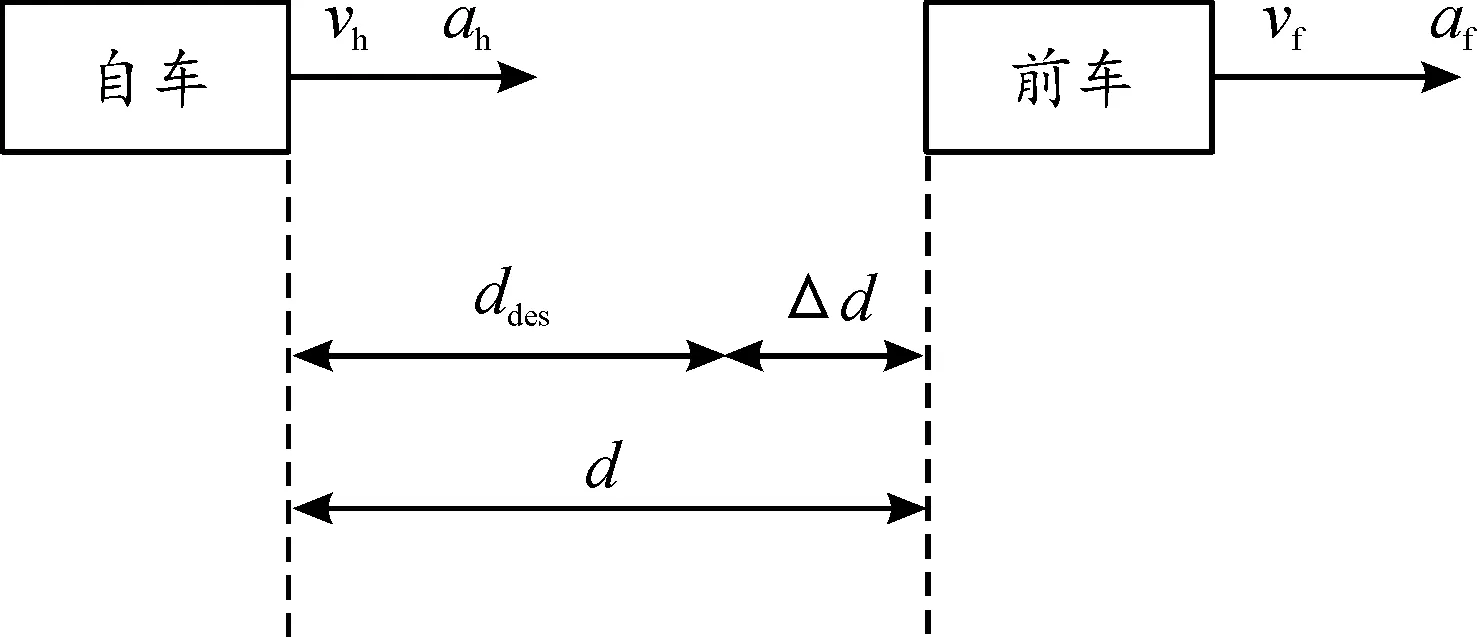
图1 ACC纵向动力学模型示意图
考虑到车辆期望加速度和实际加速度的延迟,可以用一阶惯性环节表示[11]:
(2)
式中:ades为车辆期望加速度(m/s2);ah为自车实际加速度(m/s2);TL为系统时间延迟常数(s)。
由车辆间动力学关系可知,自车与前车的动力学关系为:

(3)
式中:Δv为前车与自车纵向车速误差,(m/s);vf为前车车速(m/s);vh为自车车速(m/s);Δd为车间距误差(m);d为实际车间距(m)。
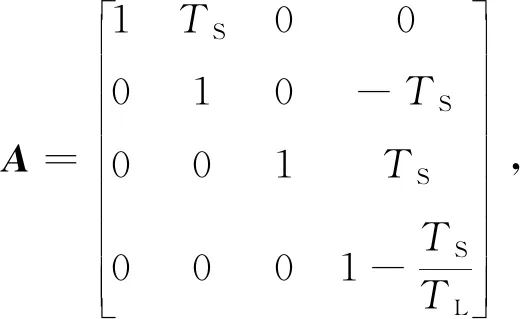
选取x=[dΔvvhah]T作为车辆状态参数,将期望加速度u=ades作为系统的控制输入,并将前车的加速度φ=af作为系统扰动。结合式(2)和式(3)对车间纵向运动学方程进行离散化处理[12],得:

(4)
式中:k为当前时刻;TS为采样时间,本文取0.1 s。
在设计自适应巡航控制系统的上层控制算法时,必须同时兼顾多个相互矛盾的优化目标,满足各方面的需求。首先需要保证安全性,其次综合考虑跟车性、驾乘舒适性以及燃油经济性,并通过加权求和,将这些控制目标转化成带约束二次规划求解问题[13]。
1) 安全性
ACC系统车辆在跟车过程中,首先需要保证安全性,车间距必须大于安全车间距。综合考虑THW及安全跟车条件[14],以约束的形式给出安全性条件:
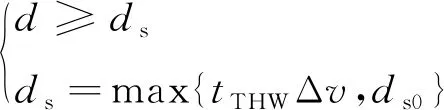
(5)
式中:ds为跟车安全车距;tTHW为碰撞时间;ds0为最小跟车安全距离。
2) 跟车性
用车间距误差和车速误差表征跟车性,当稳定跟车行驶时,车间距误差和车速误差均要趋向于0,表示为:

(6)
故用二次型表示,即为[15]:
JT=ωΔdΔd2+ωΔvΔv2
(7)
式中:JT为跟车性目标函数;ωΔd、ωΔv分别为车间距误差和车速误差的权重系数。
3) 燃油经济性
由于目标控制输入越平滑,就越有利于提升经济性,同时降低加速度的峰值有利于降低整车的能耗,故用控制量和控制量变化率加权和的形式表示燃油经济性目标函数[16],即为:
JE=ωuu2+ωΔuΔu2
(8)
式中:ωu为输入控制量权重系数,ωΔu为控制量增量权重系数。
4) 驾乘舒适性
驾乘舒适性直接影响驾乘人员对ACC的接受程度。研究表明,舒适性与加速度变化率密切相关,式(8)已有体现,在此不再赘述,故用参考加速度和跟车实际加速度差值的二次型来表示舒适性[17],即:
JC=ωca(ah,ref-ah)2
(9)
式中:JC为乘坐舒适性指标;ωca为其权重系数;ah,ref=kvΔv+kdΔd为驾驶员参考加速度[18]。
ACC多目标函数中,JT、JE和JC之间既有联系又存在一定的矛盾。在城市、城郊和公路不同的工况下,需要充分协调三者的关系,需要以加权的形式将3个子目标结合起来,寻求最佳的权重系数优化策略。
ACC多目标系统协调优化目标函数为:
J=ωTJT+ωEJE+JC=
ωT(ωΔdΔd2+ωΔvΔv2)+
(10)
式中:J为优化目标函数;ωT为跟车性权重;ωE为燃油经济性权重。
由于安全性是ACC系统最重要也是最基本的性能指标,若设计成软约束,将会增加安全隐患,因此将安全性指标设计成硬约束:
d≥ds
(11)
为使车间距在可接受范围内,减少跟车误差,故以期望车间距上下偏离一段距离来设计车间距误差。同时为了保证高速行驶时车间距在可控范围,故车间距的上下限设计成软约束形式[19],即:

(12)
跟车性中的车速误差约束如下:
(13)
对控制量及其增量进行软约束处理:

(14)

为了避免松弛因子的无限增加,一般在优化目标函数中增加惩罚项,以便控制系统得到优化问题的可行解。
定义k为当前时刻,P为预测时域,C为控制时域,则预测时域i∈[k:k+P-1],控制时域为i∈[k:k+C-1],目标函数如下:

Q[mx(k+i+1|k)+D0]+
(15)
式中:

3 3种工况下的权重在线调整策略
3.1 权重系数的在线调优方法
基于式(7)(8)(9)的子目标函数JT、JE、JC,使用一种权重系数在线实时调优方法。用s表示调优的次数。由于三者权重系数具强耦合关系,为了方便计算,固定ωc为1保持不变,只讨论ωT和ωE的变化。该方法步骤如下:
步骤1:根据经验设定一组初值为ωT0和ωE0,并以其为中心,分别以ΔωT和ΔωE为离散间隔,离散化5个数值,如表1所示。

表1 权重系数的设置
步骤2:如表2所示,从表1得到25组权重系数。将每组的权重系数(ωT(i1),ωE(i2)),i1,i2=1,2,…,5代入式(7)(8)(9)中,可求得ωTJT、ωEJE、JC三个子目标值,从而得到评价矩阵Jm×n,其中m为试验组,n为评价指标。

表2 评价矩阵元素
步骤3:找出最佳的试验组。选取一个评价函数f,由此计算出试验组的综合评价指标Xi。
Xi=f(Ji,1,Ji,2,Ji,3)i=1,2,…,p
(16)
步骤4:将最优试验组的权重系数继续作为离散化中心,令s=s+1,重复步骤1至步骤4。
在线整体调优过程如图2所示。
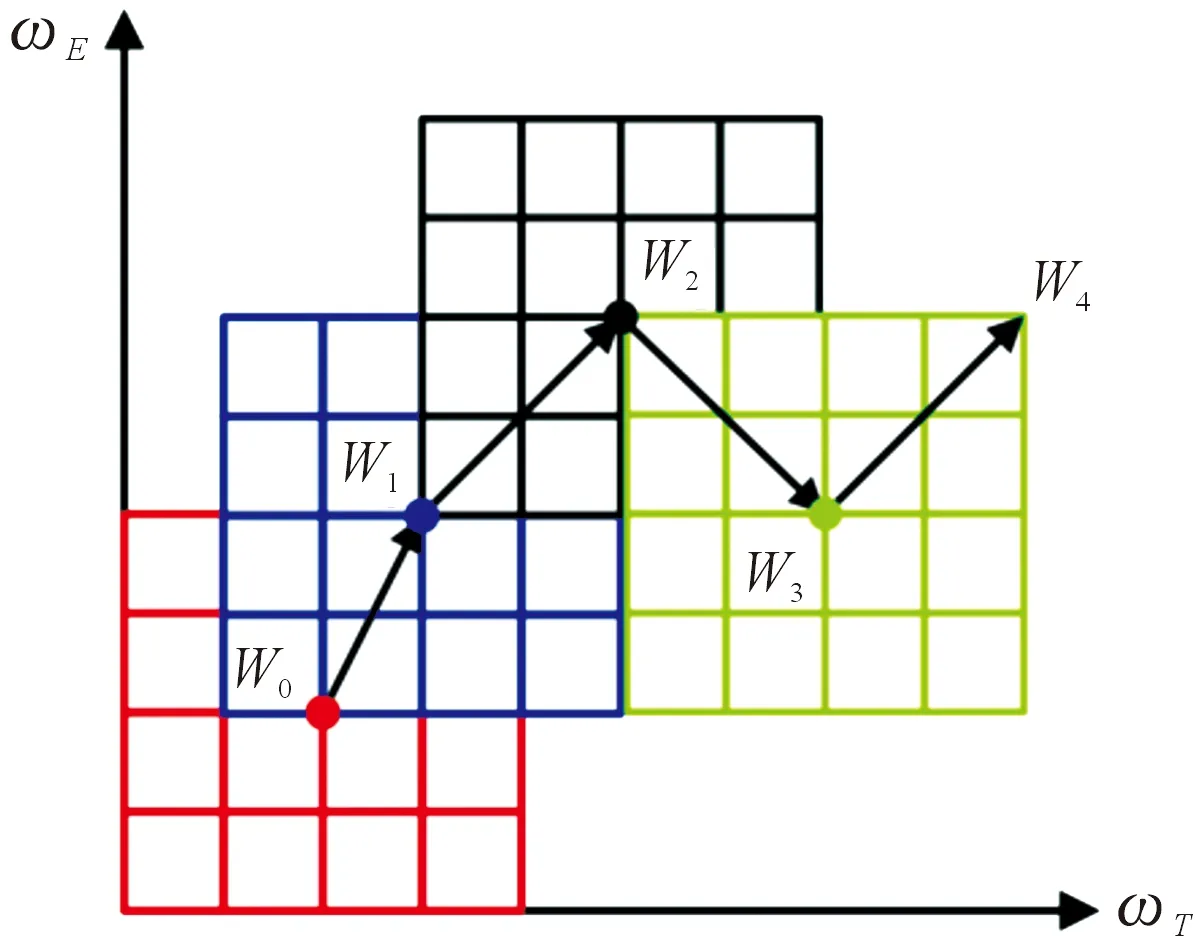
图2 权重系数在线整体调优过程示意图
需要注意的是:
1) 若权重系数间数量级相差过大,某些子目标对优化结果影响过小,易被忽视,故需要限制各权重系数的数量级,将ωT、ωE的范围限定在[0.1,10]。同时为了便于计算且保证优化精度,离散间距ΔωT和ΔωE的值设为0.1。
2) 为保证权重系数调优和MPC指标优化的同时性和一致性,权重系数的调优周期与MPC的优化采样时间保持一致,即0.1 s。当满足(ωT,s+1,ωE,s+1)=(ωT,s,ωE,s)或s≥10时即可结束。
下面将确定评价函数f,使用隶属度和熵权相结合的方法定义综合评价函数。
3.2 基于熵权法的评价方法
由于各子目标单位数值不统一,故在优化之前,需要对各参数进行无量纲化处理。
3.2.1无量纲处理方法
基于隶属度的无量纲处理方法如下:
(17)
式中:Ji, j(i=1,2,…,m;j=1,2,3)为表2中的目标函数值;μij为无量纲化的结果,表示驾驶员对此子目标值的满意程度,μij∈[0,1]。
上述隶属度函数不仅对目标值进行了无量纲化处理,而且引进了驾驶员满意度,具有模糊特性,能够反应驾驶员对跟车性、经济性以及舒适性的需求。
3.2.2基于熵权法的评价函数
无量纲化后,评价矩阵Jm×n转为隶属度矩阵:
(18)
式中:μij为第i个评价对象、第j个评价指标的隶属度。
通常,若一个评价指标在各个评价对象间数值差距越大,表明其在评价指标中可以提供更多的信息,在综合评价指标中会占据更大的比例,因此应赋予更大的权重系数。某个参数包含的信息随着熵的增大而增大,随着熵的减小而减小[20]。故本文引入信息熵来度量指标的差异性。
步骤如下[20]:
① 指标j下评价对象i的值表示指标的比例:
(19)
② 第j项指标的熵值:
(20)
式中:k=1/ln(m)>0,满足eij≥0。
③ 信息熵的差异:
dj=1-ej,j=1,…,n
(21)
④ 各指标的熵权:
(22)

熵权法的基本原则是根据指标的重要程度来客观地确定其权重系数。
由此可见,定义评价函数如下:
(23)
通过上述评价函数,可以确定最佳的一组试验组,进而确定一组最佳的权重系数。
4 控制结果与分析
多目标变权重自适应巡航控制流程如图3所示。以车辆纵向动力学模型为控制对象,基于期望安全车间距模型并结合车辆状态参数对车辆运动状态进行预测,同时使用熵权法对多目标性能指标权重系数进行在线调优,最终通过滚动优化求得期望加速度,并作用于被控车辆。

图3 多目标变权重自适应巡航控制流程框图
选取如图3所示的WLTP循环工况作为测试样本,包含城市、城郊及高速3种工况且各占1/3。
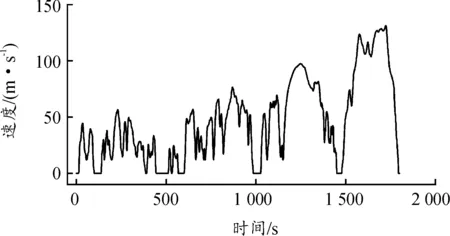
图4 WLTP循环工况
经上述的基于隶属度的熵权法调整并将ωT、ωE、ωC归一化后得到部分时间段的权重调整图,如图5—7所示。
从图5可知,城市工况下经济性的权重普遍大于跟车性的权重和舒适性权重,这是由于城市工况路况较为复杂,加减速比较频繁,恶化了燃油经济性,因此对经济性优化的需求较高,但跟车性和舒适性依然需要维持在一个可接受范围内。在图6中,可以看到,城郊工况下跟车性权重、经济性权重和舒适性权重相差无几,当急加速或急减速时,在保证安全性的前提下经济性权重略微大于跟车性权重,在部分稳态行驶工况时,跟车性权重又逐渐提升。在图7中,跟车性的权重普遍大于经济性的权重和舒适性权重,这是由于在公路工况下,汽车普遍处于高速稳态地行驶,燃油经济性改善能力有限,更加注重跟车性能。
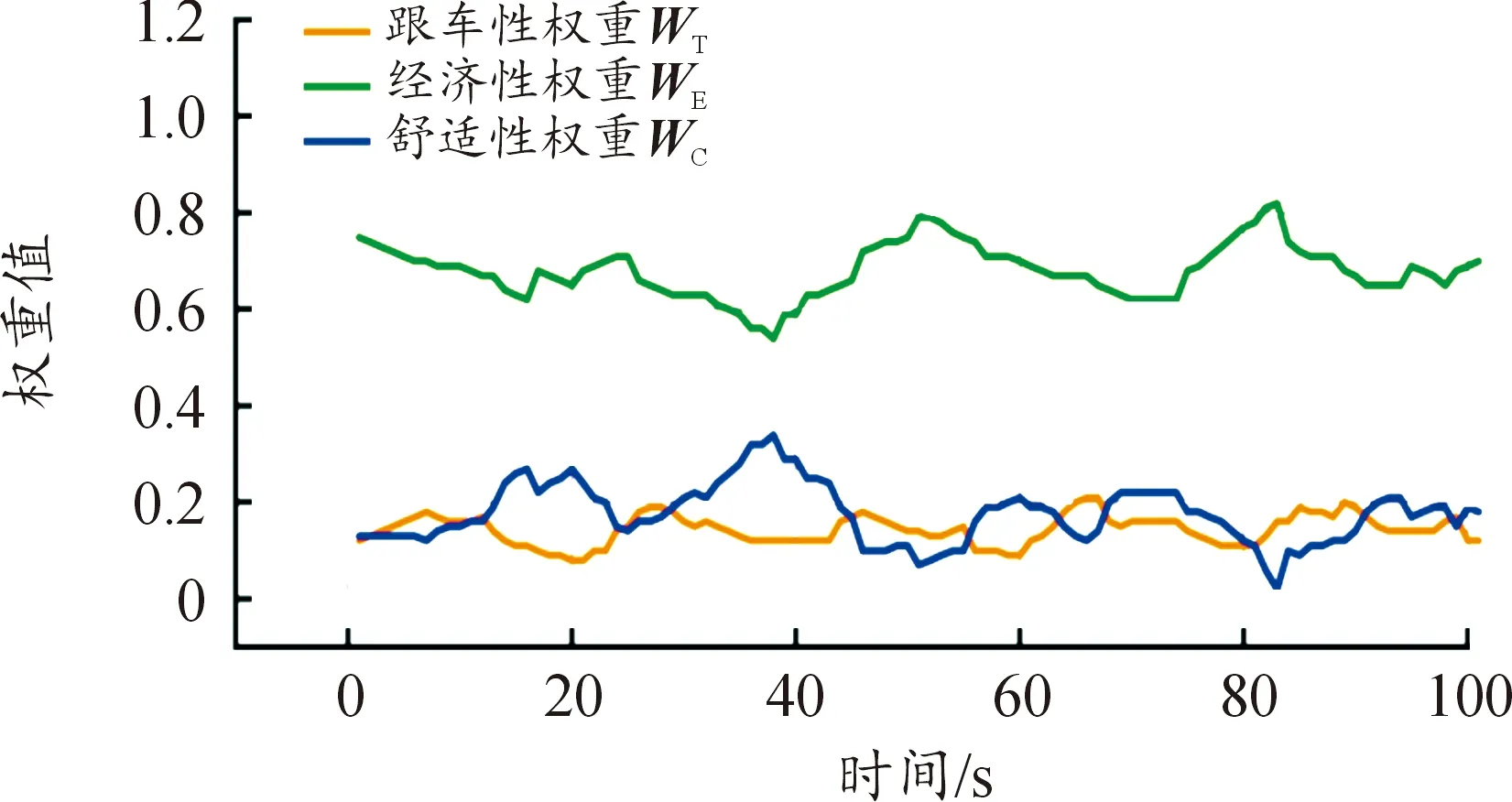
图5 城市工况权重调整

图6 城郊工况权重调整

图7 公路工况权重调整
将本文所设计多目标熵权调优变权重ACC(以下简称熵权调优ACC)与固定权重ACC以及文献[6]所提模糊控制权重调优ACC(以下简称模糊调优ACC)进行对比,仿真结果如图8—11所示。
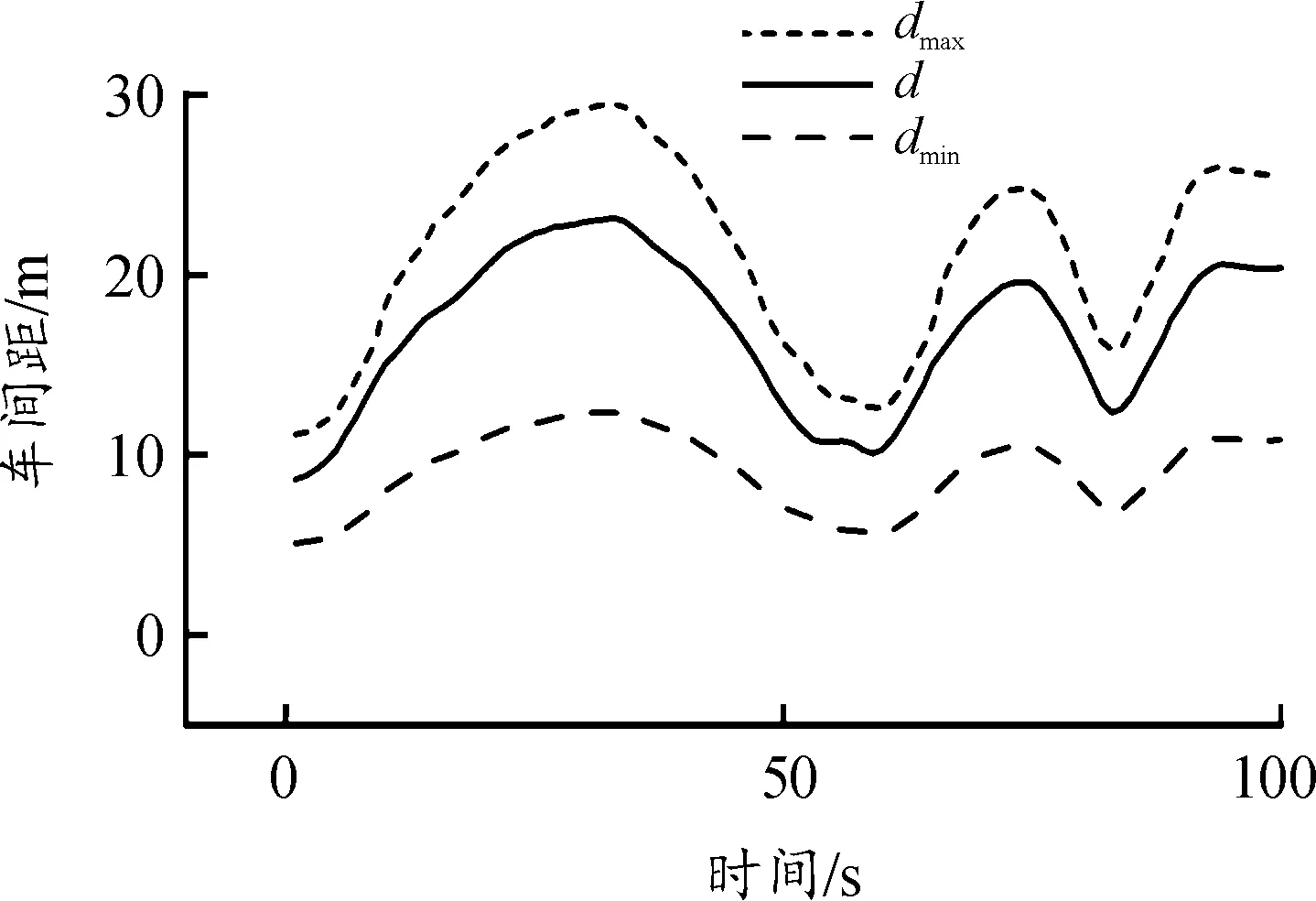
图8 城市工况车间距
图8—11分别是WLTP循环工况中城市工况部分时间段车间距、加速度、加速度变化率和舒适性指标的控制结果。图8为城市工况下熵权调优ACC的车间距变化曲线。可以看到,车间距约束在车间距的上下限内,跟车性和安全性得以保证。由图9和图10可知,在城市工况下由于增大了经济性的权重系数,熵权调优ACC与固定权重ACC、模糊调优ACC相比,加速度和加速度变化率较为平缓且峰值更低,有利于提升燃油经济性。图11表明,熵权调优ACC的舒适性指标更接近0,这是由于自车实际加速度降低明显,更加符合驾驶人的心理预期,驾乘舒适性得到改善。

图9 城市工况加速度
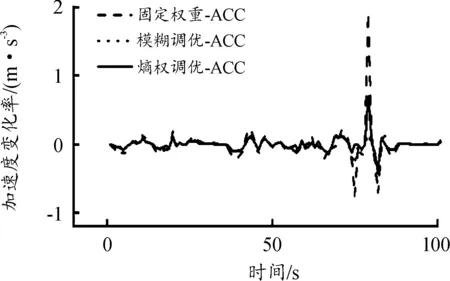
图10 城市工况加速度变化率
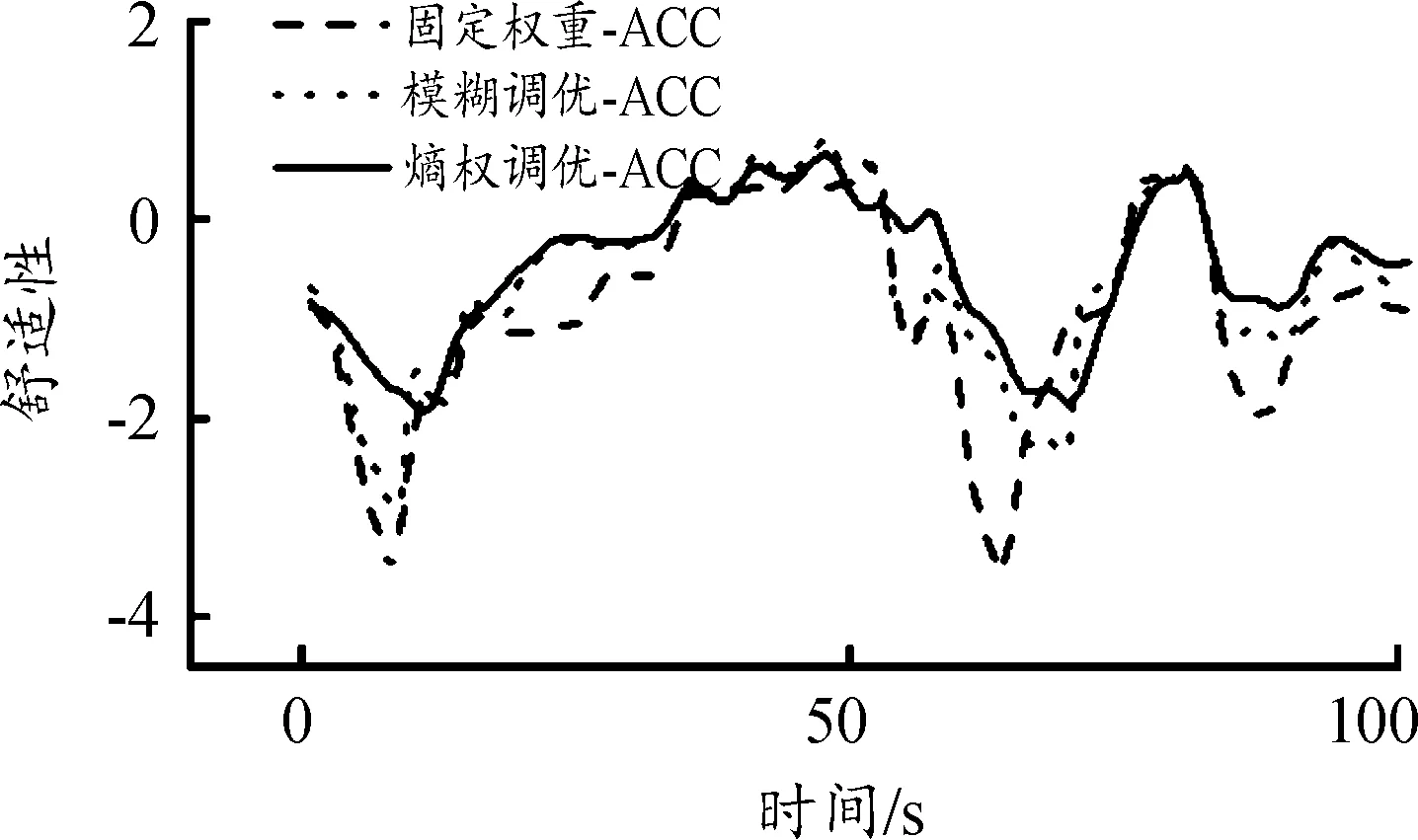
图11 城市工况舒适性指标
图12—15分别表示WLTP循环工况中城郊工况部分时间段车间距误差、加速度、加速度变化率和舒适性指标的控制结果。此时,跟车性权重和经济性权重基本等同。
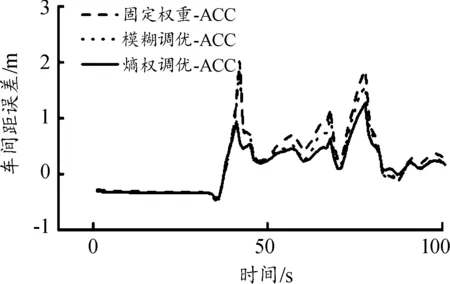
图12 城郊工况车间距误差
图12表明,熵权调优ACC车间距误差有明显的降低,跟踪性能加强。综合图13和图14来看,相较于固定权重ACC,熵权调优ACC的加速度和加速度变化率较为平滑,峰值也稍小,这是由于在目标函数中加入了经济性的指标,经济性得到了改善。由图15可知,熵权调优ACC舒适性能最佳,模糊调优ACC次之。这是由于车间距误差、相对速度和加速度都有明显减少,驾乘舒适性也得到改善。
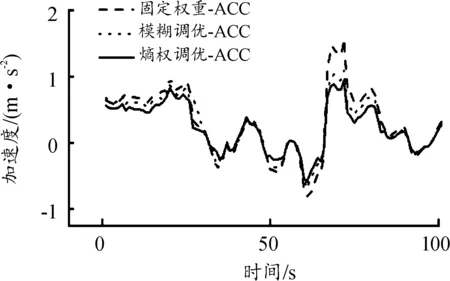
图13 城郊工况加速度
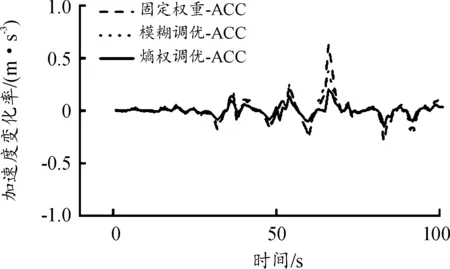
图14 城郊工况加速度变化率

图15 城郊工况舒适性指标
图16—19分别是WLTP循环工况中公路工况部分时间段车间距误差、加速度、加速度变化率和舒适性指标的控制结果。

图16 公路工况车间距误差
由图16可知,在公路工况下,由于公路工况下跟车性的权重系数增大,熵权调优ACC车间距误差稍有降低,跟踪性能加强。而图17和图18表明,三者的加速度以及加速度变化率差别不大,这是由于公路工况下大部分处于稳态工况,加减速频率降低。由图19可知,熵权调优ACC舒适性指标表现良好,驾乘舒适性得到一定改善。

图17 公路工况加速度

图18 公路工况加速度变化率

图19 公路工况舒适性指标
图20—22分别表示WLTP循环工况下各工况的百公里油耗、平均车间距误差和平均舒适性指标,分别代表着燃油经济性、跟车性和舒适性。

图20 各工况百公里油耗
图20表明,城市工况下熵权调优ACC百公里油耗降低最为明显,约10.2%,城郊工况下油耗降低约为3.4%,而公路工况下几乎无变化。由图21可知,熵权调优ACC在公路工况下平均车间距误差有了较明显地降低,保证了行驶安全性和跟车性。图22表明,在各个工况下,熵权调优ACC的平均舒适性指标都有降低,驾乘舒适性普遍得到了改善。

图21 各工况平均车间距误差

图22 各工况平均舒适性指标
5 结论
针对传统ACC多以安全性和跟车性为主,而忽视燃油经济性和舒适性的不足,提出一种综合考虑多目标的车辆变权重ACC控制系统,主要结论如下:
1) 基于MPC控制规律对行驶车辆进行多目标优化,建立车辆间纵向动力学模型,以改善跟车性、燃油经济性和舒适性,将多目标问题转换成一个带约束的二次规划问题。
2) 为了探究各工况下车辆跟车性、经济性和舒适性的权重变化规律,使用一种基于熵权法的权重在线调优方法,将车间距、车速误差、加速度、加速度变化率作为输入变量,实时地计算出不同工况下各个子目标的权重系数。
3) 选取WLTP循环工况作为测试样本,利用Simulink并结合CarSim汽车模型,仿真结果表明,相较于传统固定权重ACC和模糊控制权重系数调优ACC,在城市工况下,所设计熵权调优变权重ACC燃油经济性与舒适性有明显地提升。在城郊工况下,跟车性、经济性以及舒适性都要优于传统固定权重ACC。在公路工况下,熵权调优变权重ACC与传统ACC各性能基本一致,无明显差别。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
心理学报(2022年5期)2022-05-16
中国典型病例大全(2022年9期)2022-04-19
房地产导刊(2022年4期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
当代陕西(2020年17期)2020-10-28
人大建设(2018年5期)2018-08-16
智富时代(2018年5期)2018-07-18
