
柔性神经形态晶体管及其仿生感知应用*
2022-07-28 07:33蒋子寒柯硕祝影朱一新朱力万昌锦万青
物理学报 2022年14期
蒋子寒 柯硕 祝影 朱一新 朱力 万昌锦 万青
(南京大学电子科学与工程学院,南京 210093)
生物感知系统具有高并行、高容错、自适应和低功耗等独特优点.采用神经形态器件实现生物感知功能的仿生,在脑机接口、智能感知、生物假体等领域具有重大应用前景.与其他神经形态器件相比,多端口神经形态晶体管不仅可以同时实现信号的传输和训练学习,还可以对多路信号进行非线性的时空整合与协同调控.然而,传统刚性神经形态晶体管很难实现弯曲变形以及和人体密切贴合,限制了神经形态器件应用范围.所以,具有良好弯曲特性的柔性神经形态晶体管的研究成为了最近的研究重点.本文首先介绍了多种柔性神经形态晶体管的研究进展,包括器件结构、工作原理和基本功能;另外,本文还将介绍上述柔性神经形态晶体管在仿生感知领域中的应用;最后给出上述研究领域的总结和简单展望.
1 引言
人类感知系统中具有无数的感觉受体,这些受体负责检测各种体内和环境的信息,并将其转化为低频电脉冲并传递到专门的认知感觉神经系统[1].认知神经系统通过修改神经元之间的连接强度,实时地收集、整合、处理和存储信息,将海量的感官信息转化为综合的认知和意识,这使得我们能够比较准确和实时地认知外部世界并做出复杂的互动[2,3].自然界优化后的生物感知系统,具有并行性、容错性、自适应性和低功耗等优点[4−9].生物突触和神经元具有许多独特的特性,比如突触可塑性和时空信息整合,这些特性被称为神经形态特性.模仿神经形态特性的神经形态器件及其仿生感知可以极大地推动脑机接口[10,11]、智能感知[12−15]、生物假体[16−18]等领域的发展.
人工突触和人工神经元分别能够对信号进行记忆和整合,是仿生感知系统的重要组成部分.目前研究人员已经提出了多种类型的人工突触器件,例如基于两端孔忆阻器的人工突触[19−29]和基于三端/多端晶体管的人工突触[30−37].神经形态晶体管不仅可以实现信号的并行传输和训练学习,还可以实现多信号的非线性时空整合[38,39].此外,通过调控端的引入研究人员还可以实现对神经形态特性的协同调控[40,41].然而,任何旨在与人体交互的设备都需要与人体适当集成来确保设备具有长期稳定的性能[42].传统的刚性突触器件很难密切贴合柔软、弯曲的人体,通常会在超低应变 (约1%) 下断裂[43],无法承受器官和组织的高生理应变,严重限制了该类器件的使用范围.所以,需要开发能够与皮肤、器官、大脑等生物组织集成的、具有良好机械柔性、延展性和生物相容性的柔性神经形态晶体管.
本文将介绍三类柔性神经形态晶体管(电解质栅突触晶体管、铁电栅突触晶体管、浮栅突触晶体管)
的最新研究进展,包括器件的结构、原理和功能,并将进一步介绍上述柔性神经形态晶体管在仿生感知领域中的应用.最后,本综述还给出了上述研究领域的总结和简单展望.表1 显示了近期3 种柔性突触晶体管的代表性工作,并对其实现的神经功能和机械柔性进行简要比较.由于生物相容性对于突触晶体管在生物医疗等领域的应用具有重要意义,所以表1 中特别指出了使用具有生物相容性栅介质的突触晶体管.

表1 不同类型柔性突触晶体管比较Table 1.Comparison of different types of flexible synaptic transistors.
2 生物突触和生物神经元
大脑中的突触和神经元共同构成学习和记忆的最小单元[59],神经元可以简单地认为是用来处理信息的,突触是神经元之间在功能上发生联系的部位,也是信息传递的关键部位[60].如图1(a)所示,含有细胞核的胞体是神经元的主体,树突是胞体延伸出来的树状凸起,负责接收并整合来自其他神经元的信息.轴突通常从胞体上延伸一段距离,是信息传递的主要通道.在轴突的末端会分裂出许多细枝,这些细枝能够与其他神经元的树突或者胞体形成特殊的纳米间隙(20—40 nm),被称为突触,如图1(b)所示.每个神经元通过突触与其他成千上万个神经元相连构成了神经网络[61].
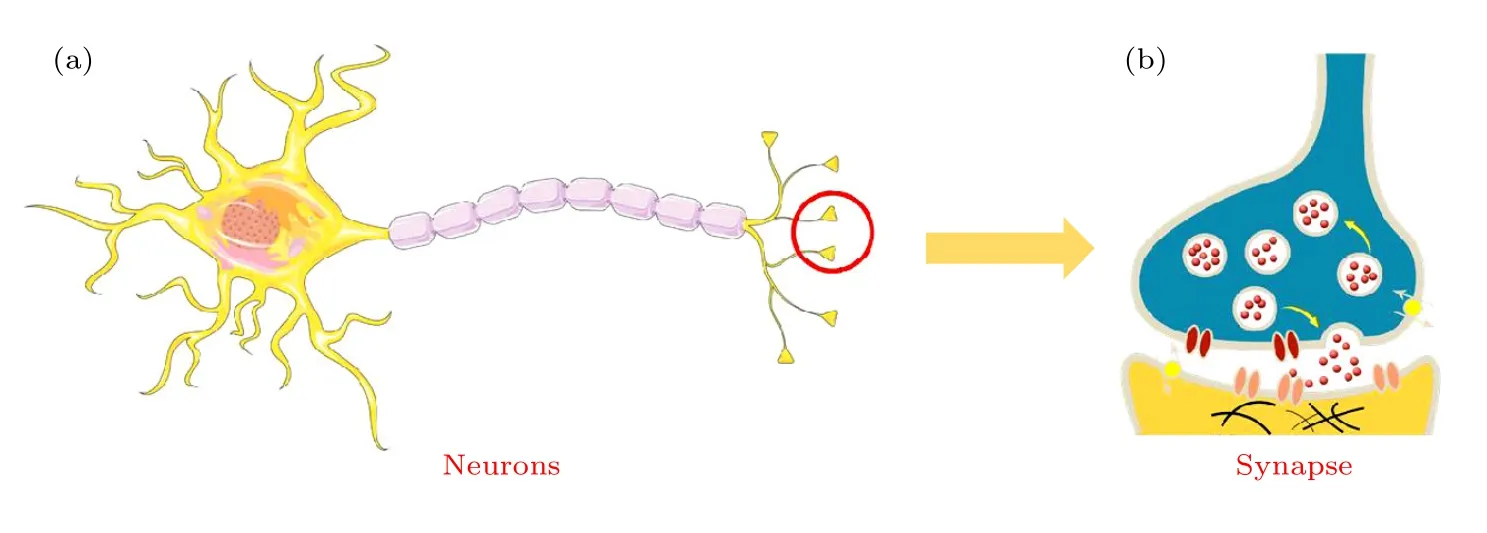
图1 生物神经元(a)和生物突触(b)的结构示意图[66]Fig.1.Schematic diagram of biological neuron (a) and biological synapse (b)[66].
生物神经元通过突触接收来自其他生物神经元的时空脉冲信号,并对接收到的信号进行整合.如果整合后的信号强度达到阈值,神经元就会输出动作电位,动作电位沿着轴突传播到其末端,刺激轴突末端释放神经递质,神经递质通过扩散穿过突触间隙与突触后膜上的受体结合,改变了突触后神经元的膜电位,从而实现信号的传递.如果积分未达到阈值,神经元的膜电位就会逐渐衰减至静态电位.根据突触后膜上受体的不同,可将突触分为抑制性突触和兴奋性突触两种.在兴奋性突触中,突触前神经元释放的神经递质会使突触后神经元产生兴奋性突触后电流/电位(excitatory post-synaptic current/potential,EPSC/EPSP).相反,在抑制性突触中,突触前神经元释放的神经递质会使突触后神经元产生抑制性突触后电流/电位(inhibitory postsynaptic current/potential,IPSC/IPSP).至今为止,已经提出了一些神经元计算模型来模拟神经元信号的整合和产生过程,比如Hodgkin-Huxley(H-H)模 型、integrate and fire (IF)模 型、leaky integrate and fire(LIF)模型[62−64].H-H 模型虽然可以高精度地模拟生物神经元的行为,但是较为复杂,包含了4 个方程和数十个参数,很难在实际中应用[65].IF 模型和LIF 模型通过将膜电位与阈值进行比较来决定是否触发尖峰,忽略了神经元树突的空间结构[67].在LIF 模型中,膜电位低于阈值会在短时间内漏出,更接近真实的神经元.IF 模型是LIF 模型的简化版本,没有泄漏行为.只要膜电位继续累积超过阈值,就会触发放电.
神经元间的连接强度称为突触权重,突触权重的重新配置(即突触可塑性),被认为是神经系统学习和记忆的基础[68].突触可塑性分为短程塑性(shortterm plasticity,STP)和长程塑性.短程塑性对应的是刺激后突触权重的短暂改变,持续时间为几十毫秒到几分钟,是神经网络实现时空相关计算功能的生理基础[69,70].双脉冲易化/抑制(paired-pulse facilitation/depression,PPF/PPD)是短程塑性的一种重要表现形式.由于短期塑性可以在短时间内改变突触权重,因此突触可以通过增强或抑制突触权重来充当滤波器[71,72].长程可塑性包括长程增强(long-term potentiation,LTP)和长程抑制(longterm depression,LTD),是突触权重持续数小时、数年甚至更长时间的改变,会给神经网络带来永久性的变化,为生物系统学习和记忆提供了生理基础[73].短程塑性可以通过充分训练或持续的神经元活动转化为长程塑性,这种转变是突触连接结构变化的结果[74,75].
时间尖峰依赖的可塑性(spike-timing-dependent plasticity,STDP)是 Hebbian 学习规则的基本类型之一,它描述了两个尖峰之间的时间间隔和顺序对突触权重的影响,在神经网络中具有将时间信息转化为记忆存储的潜力[76].人们普遍认为STDP是生物神经网络中无监督学习的基本机制[77].频率依赖的可塑性(spike-rate-dependent plasticity,SRDP)通过控制突触前脉冲的频率来调节突触权重.根据SRDP 学习规则,高频的突触前脉冲会增强突触后神经元的反应,而低频的突触前脉冲会抑制这种反应[78−80].
3 柔性电解质栅突触晶体管
电解质栅晶体管(electrolyte-gate transistor,EGT)具有低工作电压和与突触、神经元类似的动力学行为等优点,在神经形态电子学中引起了极大的关注.EGT 的结构和场效应晶体管相同,只是用电解质替代了传统的栅介质,在栅极电场的作用下,电解质中的阴阳离子发生定向移动,并且分别在电解质和栅极、电解质和沟道的界面处积累,形成具有µF/cm2量级的巨大双电层(electric-doublelayer,EDL)电容[81,82].当施加到栅极的电压相对较低时,由双电层电容对沟道电导进行易失性调控.当施加到栅极的电压足够高时,电解质中的离子可能穿过电解质和沟道的界面,对沟道进行电化学掺杂或者与沟道发生电化学反应,从而实现对沟道电导的非易失性调控[42].
目前,常用电解质材料大致可以分为3 类:1)无机固态电解质,例如纳米颗粒SiO2[83−86]、Al2O3[87,88];2)离子液或离子凝胶[46,89−92];3)聚合物电解质或聚电解质,例如LiClO4/聚环氧乙烷(polyethylene oxide,PEO)[93−95]、壳聚糖[96−99].
3.1 无机固态电解质
无机固态电解质栅晶体管能够和标准工艺兼容,并且具有较低的制备温度,在柔性电子领域具有巨大的应用前景.但是较低的制备温度也容易产生粉尘,可能会对设备造成损害.2013 年,Wan 等[85]通过等离子体增强化学气相沉积法在铟锡氧(ITO)覆盖的聚对苯二甲酸乙二醇酯(polyethylene terephthalate,PET)衬底上沉积了一层掺磷的纳米颗粒SiO2,通过简单的自组装方法制备了铟锌氧(IZO)源漏电极和沟道,成功地模拟了EPSC,PPF,LTP等重要突触塑性.这是对柔性人工突触的一次积极尝试,对构建神经形态系统非常有帮助.受到生物神经元中树突整合和尖峰操作的启发,他们还在柔性衬底上制备了用于PH 传感器的多输入柔性氧化物神经形态晶体管[86].器件的结构示意图和柔性神经形态晶体管的电容网络示意如图2(a)所示.IZO 沟道中的载流子密度由传感栅和控制栅所有输入加权和调制.器件工作在准静态双栅协同传感模式时,对pH 的灵敏度最高可达约105 mV/pH.该研究为生化检测提供了一种超低功耗、高灵敏度、快速响应的新概念传感平台.

图2 (a)基于多栅 IZO 神经形态晶体管的柔性 pH 传感器的示意图[86];(b) 神经纤维-OECT 的装置结构示意图和 OECT-神经纤维的照片,插图:离子在可渗透半导体中的掺杂机制示意图;(c) P3CT-神经纤维的 PSC 作为施加电压尖峰之间的时间间隔(Δt)的函数 (VGS=–0.7 V,100 ms);(d) P3CT-和 P3HT-神经纤维中超过 45 个周期的LTP 和LTD 循环测试;(e) 生物神经网络和神经纤维晶体管网络示意图(左),10 × 10 P3CT-神经纤维阵列的照片(右)[46]Fig.2.(a) Schematic illustration of the flexible pH sensor based on an IZO neuromorphic transistor with multiple gate electrodes[86];(b) schematic of the device architecture for neurofiber-OECT and photograph of OECT-neurofiber,inset:schematic of the doping mechanism by ions in a permeable semiconductor;(c) PSC of a P3CT-neurofiber as a function of the time interval (Δt) between applied voltage spikes (VGS=–0.7 V,100 ms);(d) cycle test of LTP and LTD in P3CT-and P3HT-neurofibers over 45 cycles;(e) schematic of biological neural network and neurofiber transistor network (left),photograph of a 10 × 10 array of P3CT-neurofibers (right)[46].
3.2 离子液或离子凝胶
离子液是室温下呈液相的盐类,仅由阴阳离子组成.离子凝胶通常是由嵌段共聚物溶解在离子液中并凝胶化获得[100],其丰富的空间网状结构有利于离子的移动.离子液和离子凝胶具有相对更高的比电容和更短的极化时间,能够实现更高的开关速度和更快的工作频率[101].Kim 等[46]提出了一种可实现树突网络的神经纤维有机电化学晶体管,并特别提出以羧酸官能化聚噻吩-聚[(3-(6-羧己基)噻吩)-2,5-二 基] (poly[3-(6-carboxyhexyl) thiophene-2,5-diyl],P3CT)为沟道来增强记忆保留和循环耐受性,器件结构如图2(b)所示.该器件不仅模拟了EPSC,LTP,LTD 等基本突触功能,而且模拟了神经元的LIF 行为,如图2(c)所示.与聚(3-己基噻吩) [poly(3-hexylthiophene-2,5-diyl),P3HT]相比,P3CT 在长期稳定性和循环耐受性上具有显著优势,如图2(d)所示.为了证实P3CT-神经纤维在纺织人工神经网络系统中的应用可行性,又展示了一个包含100 个不同突触的阵列,连接了10 个突触前神经元和10 个突触后神经元.如图2(e)所示,这个神经网络阵列是由10 个P3CT-神经纤维与10 个栅级微纤维编织而成,成功演示了基于时域的迭代尖峰神经网络学习的语音识别,平均识别准确率高达88.9%.
延展性对于柔性突触晶体管至关重要,目前具有延展性的柔性突触晶体管多数以离子凝胶为电解质栅.2018 年,Lee 等[102]制备了以离子凝胶作为电解质栅、P3HT 纳米线为沟道的可拉伸突触晶体管,这种突触晶体管即使沿着沟道长度或宽度方向拉伸100%,仍然能够保持稳定的性能.2019 年,Bao等[103]制备了以离子凝胶为电解质栅、碳纳米管为沟道的突触晶体管阵列.虽然在沿沟道长度方向拉伸20%时,观察到了源漏电流的少许退化.但是在沿沟道宽度方向拉伸20%时,器件的源漏电流基本保持不变.2022 年,Liu 等[104]制备了以离子凝胶为电解质栅、P3HT/PEO 纳米纤维为沟道的可拉伸神经形态晶体管,即使在沿着沟道长度方向拉伸50%的条件下,器件仍然具有稳定的突触功能.所以,以离子凝胶为电解质栅的柔性突触晶体管在仿生感知、软机器人、生物假肢等领域具有巨大的应用潜力.
3.3 聚合物电解质或聚电解质
单纯的绝缘聚合物不能传输电子,是很好的栅介质材料[106−108].但是不包含离子的纯聚合物在施加偏压时不会形成EDL,所以通常将无机盐溶解在离子配位聚合物中形成聚合物电解质[105,109,110]或使用含有离子或可电离基团重复单元的聚电解质[111−113]作为电解质栅.聚合物电解质中研究最多的就是锂盐与PEO 所构成的聚合物电解质,例如LiClO4/PEO.2020 年,Zhu 等[105]在聚酰亚胺(polyimide,PI)衬底上制备了以In2O3为沟道、LiClO4/PEO 为栅介质的柔性突触晶体管,具有良好的柔韧性和机械可靠性,器件结构如图3(a)所示,成功地模拟了突触的短程可塑性和短程可塑性到长程可塑性的转换,如图3(b)和图3(c)所示.随后又通过在栅极上施加一系列连续脉冲来改变沟道电流,如图3(d)所示,这表明该突触晶体管具有可接受的稳定性和循环耐受性.最后,为了进一步可视化In2O3突触晶体管中的短期和长期记忆,使用了5×5 阵列来研究图像记忆.为使用环保溶液制备的非晶金属氧化物半导体制造人工突触器件提供了一种新方法.
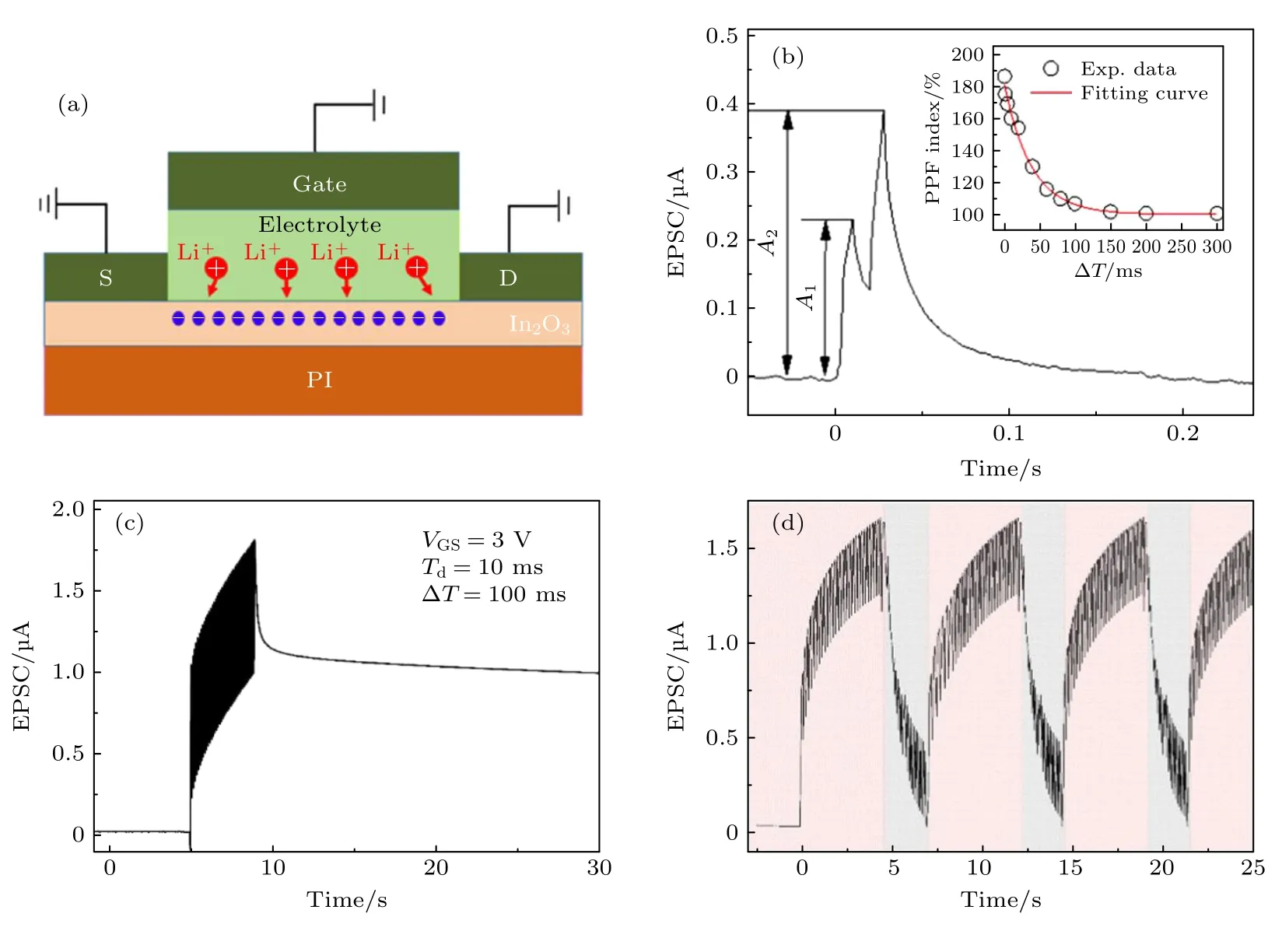
图3 (a) LiClO4 溶解在PEO 中作为栅极电解质的突触晶体管的结构示意图;(b) 双脉冲易化,插图:PPF 指数被绘制为两个脉冲之间时间间隔的函数;(c)由40 个突触前脉冲触发的EPSC;(d) LTP 和LTD 的可重复性[105]Fig.3.(a) Schematic of synaptic transistors with LiClO4 dissolved in PEO as gate electrolyte;(b) paired-pulse facilitation,inset:PPF index is plotted as a function of time interval between the two pulses;(c) EPSC triggered by 40 presynaptic pluses;(d) repeatability of LTP and LTD[105].
壳聚糖等天然聚合物的衍生物是用于EGT 的常见聚电解质,具有无毒、可生物降解、生物兼容等优势[114−117].Ke 等[97]制备了以壳聚糖/氧化石墨烯复合薄膜为栅介质、铟镓锌氧(IGZO)为沟道的自支撑神经形态晶体管,器件结构如图4(a)所示,在设计智能警报系统和人工眼睛方面具有较大的应用潜力.光刺激角膜伤害感受器(photoexcited corneal nociceptor,PCN)的示意如图4(b)所示,通过以光脉冲作为突触前刺激、IGZO 沟道中的电流作为突触后响应,成功地模拟了这一生物功能.光响应的原理如图4(c)所示.EPSC 的幅值被视为PCN 对外界刺激的响应,将10 nA 定义为PCN的阈值.当光刺激触发的EPSC 达到或超过10 nA时,PCN 会“活化”并触发警报程序,此时的光功率称为触发阈值功率(PT).用50 个光脉冲来产生受伤条件,受伤前后不同功率的单个光脉冲产生的光电流如图4(d)所示.可以看出,在受伤情况下,PCN 会产生更大的光电流响应并且PT向较低处移动,成功地模拟了异常性疼痛和痛觉过敏.此外,还利用调控端VG对IGZO 沟道的横向调控,成功地模拟了中枢敏化和中枢镇痛作用,如图4(e),(f)所示.
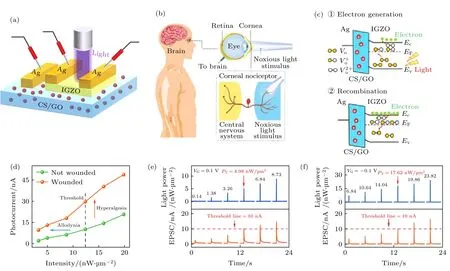
图4 (a) 自支撑光电神经形态晶体管示意图;(b) 光刺激角膜伤害感受器示意图;(c) IGZO 晶体管中光学响应的能带图;(d) PCN“受伤”前后实验测量的光电流;(e) 利用VG=0.1 V 模拟的中枢敏化,PT 降至 4.98 nW/µm2;(f) 利用VG=–0.1 V 模拟的镇痛作用,PT 增大到 17.62 nW/µm2[97]Fig.4.(a) Schematic diagram of the freestanding photoelectric neuromorphic transistor;(b) schematic illustration of photoexcited corneal nociceptor;(c) energy-band diagrams of optical responses in IGZO-based transistor;(d) experimentally measured photocurrents of the PCN before and after“wounded”;(e) central sensitization simulated by VG=0.1 V with PT reduced to 4.98 nW/µm2 ;(f) analgesic effect simulated by VG=–0.1 V with PT increased to 17.62 nW/µm2[97].
EGT 具有丰富的离子动力学特性,与其他器件结构相比,可以更好地模拟突触功能,其低工作电压特性也为超低能耗突触器件的实现提供了可能性.然而,其小动态范围和有限的保留特性限制了其进一步应用,此外,电解质的不稳定性(例如:离子液)也可能成为ECT 实际应用的主要限制.
4 柔性铁电突触晶体管
柔性铁电场效应晶体管(ferroelectric fieldeffect transistor,FeFET)具有无损读出、低功耗和高运行速度等优点,在非易失性存储、人工突触等领域得到广泛应用[118−122].FeFET 使用铁电材料作为栅介质,铁电材料可以随着电场的转换在两种极化状态之间转换,这两种极化状态可用作存储器的两种数字态[123].由于铁电极化和载流子之间的库仑作用,可以通过施加栅极电压来控制铁电栅的极化状态,进而实现对载流子浓度的非易失性控制[124].2011 年,Müller 等[125]报道了Hf0.5Zr0.5O2(HZO)薄膜的铁电特性.HfO2基铁电薄膜因其具有良好的CMOS 兼容性被广泛研究,然而,氧化物铁电材料通常需要较高的结晶温度,极大的限制了他们在柔性电子学领域的应用[126].
2020 年,Li 等[54]提出了一种由云母衬底、Sr-RuO3(SRO) 栅电极、PbZr0.2Ti0.8O3(PZT) 铁电栅介质和IGZO 沟道组成的全无机FeFET 来构建突触器件,器件结构如图5(a)所示.50 µs 的突触前脉冲能够导致沟道电导急剧的增大,但无法维持,这对应于短期可塑性,如图5(b)所示.这种器件不仅能实现编程电压脉冲对沟道电导接近线性的调制,还具有优异的机械柔性和高温可靠性.弯曲半径降至4 mm、弯曲重复次数高达400 次、弯曲持续时间长达7200 s 等条件对器件的LTP,LTD 影响很小,对网络的识别精度影响也很小,如图5(c)—(h)所示.受益于器件的全无机结构,在100 ℃时,器件的突触行为仍然完好无损,并且在不同温度下的性能并没有明显变化.此外,由于该突触器件具有线性、可重复和稳定的权重更新特性,MNIST(Modified National Institute of Standards and Technology)数据集手写数字的识别准确率高达94.4%.这种柔性、稳定的全无机突触器件在未来需要忍受环境干扰的高性能神经形态计算中具有极大地应用潜力.
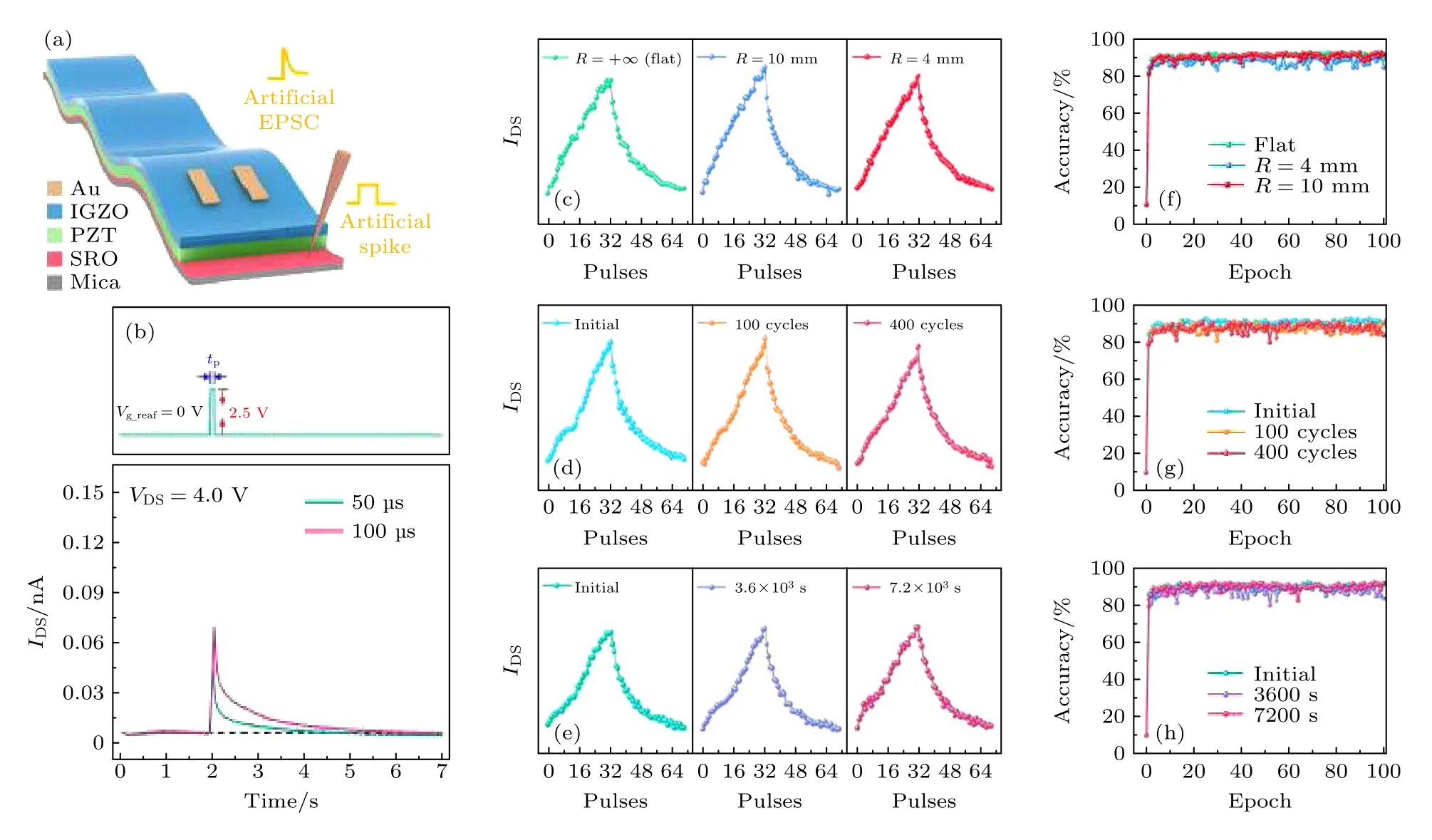
图5 (a) 全无机柔性FeFET 示意图;(b) 不同脉宽的突触前脉冲电压触发的EPSC;不同弯曲半径(c)、不同弯曲循环次数(d)、不同弯曲时间(e)下的LTP 和LTD;(f)—(h)对应的MNIST 数字识别准确率[54]Fig.5.(a) Schematic of the all-inorganic flexible FeFET;(b) EPSC triggered by presynaptic voltage pulse with different spike widths;LTP and LTD with the different bending radius,(c) different bending cycles (d),and different bending durations (e);(f)–(h) the corresponding MNIST digit recognition accuracy[54].
聚偏二氟乙烯(polyvinylidene fluoride,PVDF)及其共聚物是应用最广泛的铁电聚合物,其中又以聚(偏二氟-三氟乙烯)[poly(vinylidene fluoride-cotrifluoroethylene),P(VDF-TrFE)]的应用最为广泛[127−131].Kim 等[53]报道了第1 个基于自支撑铁电有机神经形态晶体管(ferroelectric organic neuromorphic transistors,FONTs)的超薄人工突触,该器件以P(VDF-TrFE)薄膜为栅介质、并五苯为沟道,器件结构如图6(a)所示,总厚度只有500 nm左右.通过简单的干剥离和粘贴方法,制备的器件可以稳定地转移到各种不平整的衬底上.另外,通过精确调节P(VDF-TrFE)的剩余极化,成功地模拟了EPSC,LTP,LTD,STDP 等重要的突触性能,并且FONTs 在如图6(b)所示的恶劣情况下,施加6000 次突触前脉冲依然能获得稳定的LTP,LTD 转换,结果如图6(c)所示,展现出在可穿戴智能电子领域的巨大应用潜力.2020 年,Lee 等[132]提出了一种能够感知、存储和学习各种触觉信息的人工触觉学习铁电皮肤(artificial tactile learning ferroelectric skin,ATFES),器件结构如图7(a)所示,展示了10000 次电脉冲输入期间LTP,LTD 的稳定转变、3.18% 的低循环变化性以及与压力脉冲数量和幅度相关的突触可塑性等基本突触功能.此外,构建了4×4 的ATFES 阵列用于对3 种不同风格手写字母的识别,如图7(b)所示.即使在考虑10%噪声的情况下,也有高达99%以上的识别准确率.这种ATFES 为设计具有容错触觉感知学习能力的高精度人工智能电子皮肤提供了一条新的途径.
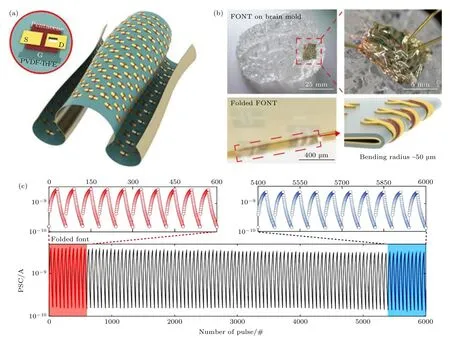
图6 (a) 以P(VDF-TrFE)薄膜为栅介质的自支撑有机神经形态晶体管的结构示意图;(b) 贴合在大脑形状模型(上图)和弯曲半径为50 µm 的FONTs(下图)照片;(c) 在6000 次突触前脉冲期间,折叠FONTs 的LTP 和LTD 的重复转换,上左、上右图分别代表最初和最后的10 个LTP,LTD 循环[53]Fig.6.(a) Schematic diagram of freestanding ferroelectric organic neuromorphic transistors with a P(VDF-TrFE) film as the dielectric layer;(b) photo images of the FONTs on the brain-shaped mold and folded FONTs with a bending radius of 50 µm (lower panel);(c) repetitive transition between the LTP and LTD in the folded FONTs during 6000 spikes of presynaptic pulses (±30 V for 500 ms),the left and the right in upper graph shows the LTP and LTD during the initial and final 10 cycles,respectively[53].
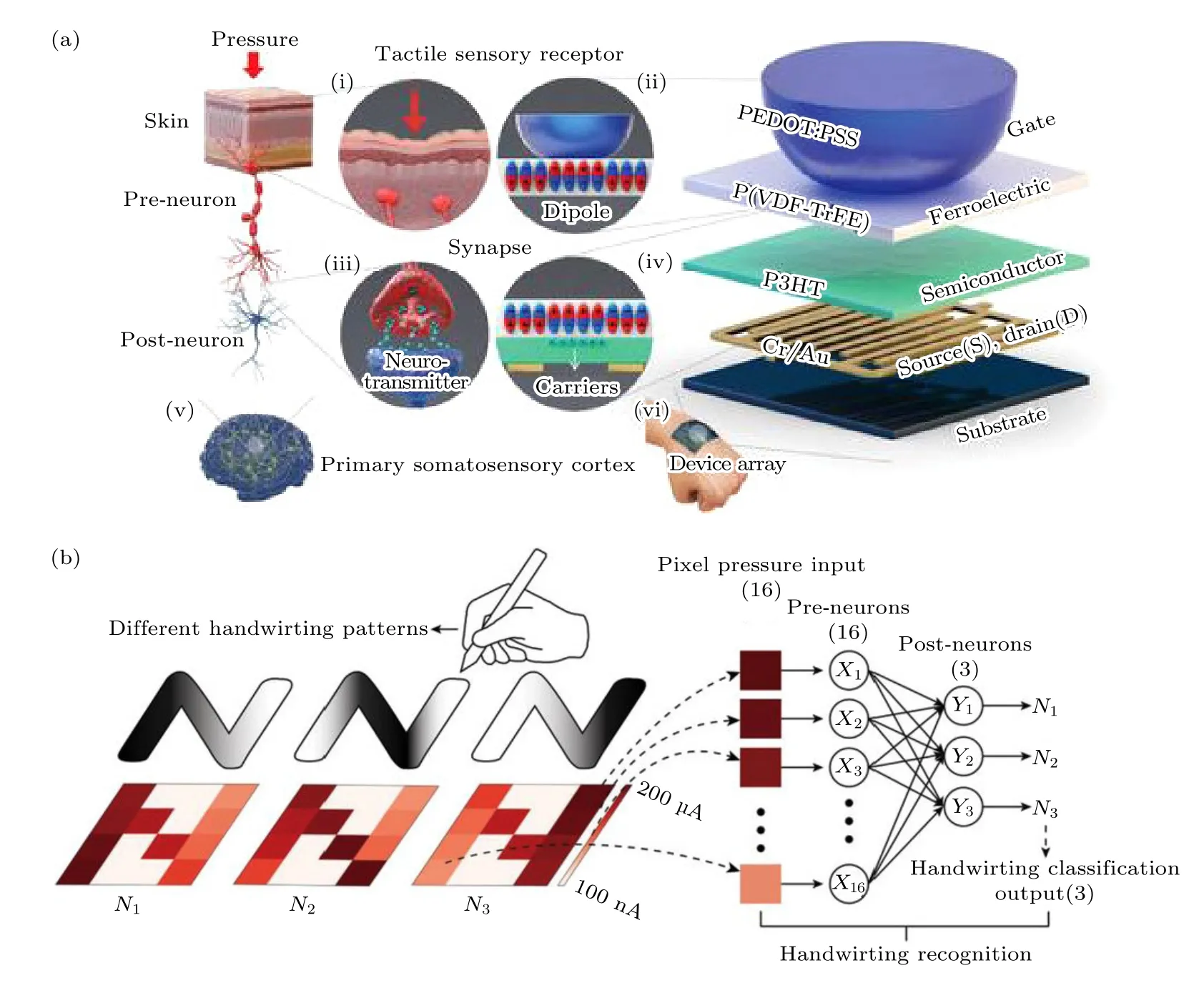
图7 (a) 生物触觉感知系统示意图(左)和人工触觉学习铁电皮肤的器件结构示意图(右);(b)三种不同手写风格(N1,N2 和N3)的“N”图案示意图(左)和用于识别手写图案的单层神经网络的组成部分(右)[132]Fig.7.(a) Schematic of the biological tactile perception system (left) and schematic device structure of the artificial tactile learning ferroelectric skin (right);(b) schematic illustrations of“N”patterns with three different handwriting styles (N1,N2,and N3) (left)and constituents of a single-layer neural network used to recognize handwriting pattern (right)[132].
虽然铁电突触晶体管具有稳定性高、开/关比大、权重更新曲线变化小等优点[133].但是,制备大规模铁电突触阵列所需的高质量铁电薄膜是困难的.此外,它们还难以实现出色的短程突触可塑性.因此,需要进一步研究以解决这些问题.
5 柔性浮栅突触晶体管
浮栅场效应晶体管具有和传统场效应晶体管相似的器件结构,区别在于浮栅场效应晶体管的栅介质中间夹了一层存储功能层,称之为“浮栅”.在编程过程中,当栅极电压足够大并且隧穿层足够薄时,可以通过量子隧穿效应或热发射将电荷注入到浮栅上[55,134,135].由于电荷阻挡层和隧穿层的存在,浮栅中的电荷可以被非易失的存储,进而对沟道电导进行非易失性的调制[136].2009 年,Someya 等[137]在聚萘二甲酸乙二醇酯(polyethylene-naphthalate,PEN)衬底上制备了第一个柔性非易失性存储器阵列,AlOx(4 nm)和烷基膦酸自组装单层(2 nm)的复合层作为阻挡层和隧穿层,Al(20 nm)为浮栅.得益于超薄的栅介质,仅需较小的写/擦电压(≤6 V)就能产生大的、可逆的、非易失性的阈值电压偏移.
浮栅晶体管能够对沟道电导进行调制并且长期保持的能力,可以用来有效地记录突触权重,因此成为最流行的突触结构之一[138−141].Zhang 等[57]在柔性的PET 衬底上制备了一种基于MoS2的光电双调控异突触,器件结构如图8(a)所示.该突触器件具有超快的操作速度和超低的功耗(LTP 中每个尖峰消耗18.3 aJ,LTD 中每个尖峰消耗 28.9 aJ).除了EPSC,LTP,LTD 和短程记忆到长程记忆的转化以外,还模拟了学习-遗忘-再学习行为,如图8(b)所示.与单独的电调制相比,光电协同调制可以增强LTP 的高阶相关性,获得更大范围的突触权重.但是,由于光和电刺激的协同调制,抑制效应减弱,可以通过额外的电脉冲将突触权重恢复到初始状态以进行对称调制,如图8(c)所示.为了研究该突触器件的机械稳定性,测量了该器件在弯曲半径为10 mm 和7.5 mm 条件下的转移曲线,阈值电压没有明显变化,并且成功模拟了在弯曲半径为10 mm 的情况下的EPSC,IPSC,LTP,LTD 等突触可塑性.应该注意的是,在弯曲状态下,LTP 和LTD没有任何退化,甚至观察到了一些增强,如图8(d)所示,证明了这种柔性人工突触装置在可穿戴应用方面具有巨大的应用潜力.
基于连续型浮栅的突触晶体管不可避免地存在电荷泄漏、耦合比低、电荷保持能力差等局限性[132].使用分散的、不连续的浮栅,如纳米颗粒[137,140,141]、量子点材料[142−144],可以显著地抑制浮栅中电荷的横向泄漏,从而延长电荷保持时间.Han 等[55]首次使用C60/聚(甲基丙烯酸甲酯)[poly (methyl methacrylate),PMMA]复合层作为栅介质,展示了能够同时表现出信号传输和学习功能的人工柔性有机突触晶体管,如图8(e)所示.C60纳米颗粒通过溶液法均匀分散在PMMA 中,能够通过对两种载流子电荷的捕获来实现阈值电压的双向迁移.这种突触晶体管具有2.95 V 的存储窗口、大于103的电流开/关比、超过500 次的写入/擦除循环耐受性,成功地模拟了包括 EPSC,PPF,PPD,LTP 和重复学习过程在内的突触功能,推动了基于纳米颗粒的柔性浮栅人工突触晶体管的发展.
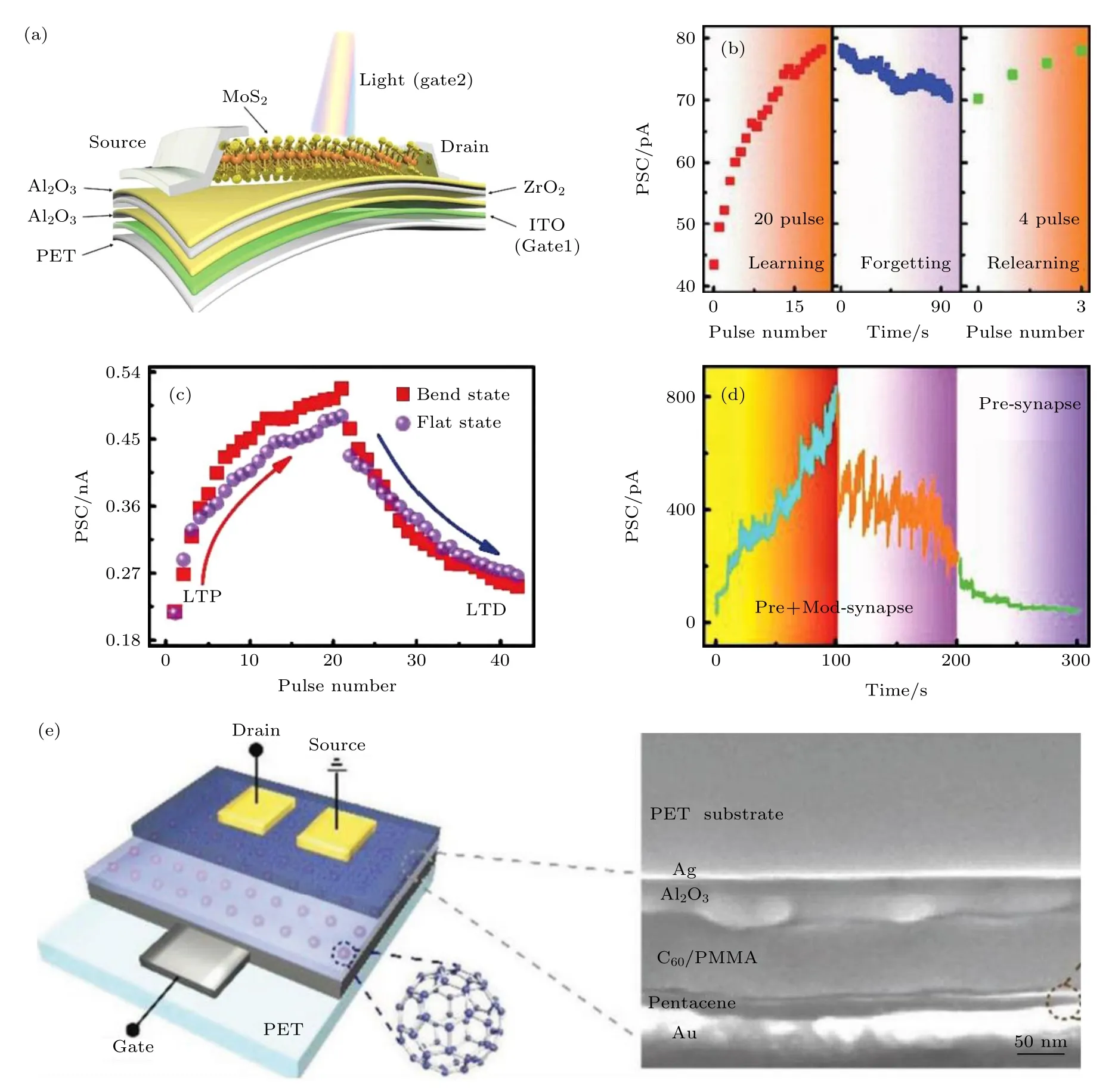
图8 (a) 光电双调控的柔性人工异突触示意图;(b) 由两个连续光脉冲序列模拟的学习-遗忘-再学习行为;(c)光照条件下,电脉冲产生的LTP 和LTD,并且通过单独的电脉冲获得进一步的抑制;(d) 在平坦状态和弯曲状态 (R=10 mm) 下,PSC 作为突触前脉冲数的函数[57];(e) C60 浮栅突触晶体管的示意图(左)和横截面 SEM 形貌图像(右)[55]Fig.8.(a) Schematic diagram of flexible artificial heterosynapse with photoelectric dual modulation;(b) learning,forgetting and relearning behaviors emulated by two sequences of consecutive light pulses;(c) electrical pulses induced the LTP and LTD under illumination of light,further depression was obtained by electrical pulse independently;(d) PSC as a function of pre-synaptic pulse number in a flat states and curved state (R=10 mm)[57];(e) schematic representation (left) and cross-sectional SEM topography image (right) of a C60 floating gate synaptic transistor[55].
6 仿生感知应用
使用神经形态器件构建人工神经系统可以有力地推动脑机接口、智能感知、生物假体等领域的发展.而构建人工神经系统需要开发能够实时感知外界刺激、对传感信息进行处理和存储,并做出反应的智能仿生感知系统[142−144].目前的仿生感知系统一般由传感器、神经形态器件和转换组件构成,并用以模仿特定的感知功能.通过将外部刺激(比如:声音、压力、光、气体)转化为电信号[145−150],然后利用人工突触的权重调节对信号的进行整合或记忆,产生与生物感知系统相似的响应,实现对外界环境的仿生感知.与传统的感知系统相比,基于柔性突触晶体管的仿生感知系统具有更简单的电路、更低的功耗,同时又赋予系统可拉伸、可降解等生物学特性[66,102,151,152].
人类的视觉系统对于生存和学习都至关重要,大约80%的外部刺激是通过视觉感知获得的[154,155].这是一个极为高效的过程,在大脑进行更复杂的行动之前,
视网膜对光的检测和图像信息的预处理是并行操作的.2021 年,Zhu 等[153]报告了一种高集成密度、对光具有非凡灵敏度的32×32 柔性传感器阵列.光电传感器同时充当光感受器和生物突触,可以直接响应光刺激并进行预处理,器件结构如图9(a)所示.碳纳米管(carbon nanotubes,CNTs)和钙钛矿CsPbBr3(CPB)量子点(quantum dot,QD)组成的沟道在光生载流子的分离和传输中起关键作用,实现了高响应度5.1×107A/W 和超高比检测 率2×1016Jones (1 Jones=1cm·Hz1/2·W-1)的超高比检测率.图9(b)描述了观察到陌生和熟悉的面孔时,人类的视觉系统印象,该现象被传感器阵列成功模拟.此外,还成功地演示了神经形态强化学习功能,如图9(c)所示,理想输入图片和训练的权重图之间的计算精度随着训练脉冲数量的增加而增大.最后,又进行了人脸学习过程的模拟,如图9(d)所示,随着训练脉冲数量的增加,可以学习更多的面部特征.光感受器、存储元件和计算节点组件在阵列中共享相同的物理空间,并行和实时的处理信息,这为开发人工视觉系统提供了动力.
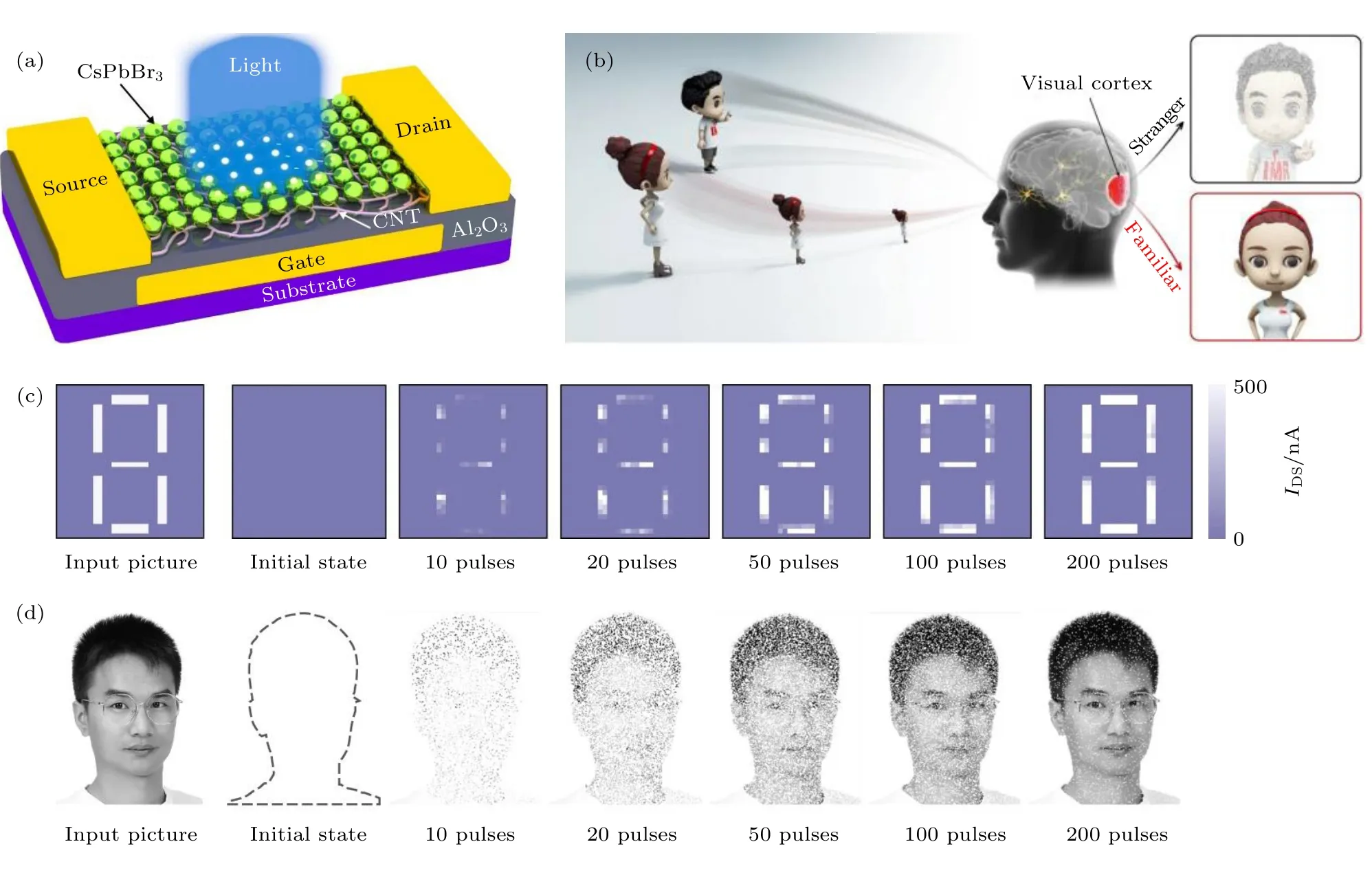
图9 (a) 以CNTs/CsPbBr3-QDs 为沟道的光电晶体管示意图;(b) 当观察到陌生和熟悉的面孔时,人类视觉系统印象的示意图;(c) 不同训练脉冲数的训练权重结果;(d) 模拟人脸的学习过程[153]Fig.9.(a) Schematic diagram of the phototransistor with a CNTs/CsPbBr3-QDs channel;(b) schematics illustration of the impression of human visual systems when unfamiliar and familiar faces are observed;(c) training weight results with different number of training pulses;(d) simulation of the learning process of a human face[153].
生物感觉系统的一个主要优点是能够整合两种或多种感觉模式[156,157],这将有利于执行更复杂的识别或决策任务.Wan 等[158]报道了一种具有视觉-触觉融合的双模人工感觉神经元(bimodal artificial sensory neuron,BASE).该BASE 由4 个核心组件组成:电阻式压力传感器、基于钙钛矿的光电探测器、基于水凝胶的离子电缆和突触晶体管,如图10(a)所示.光电探测器和压力传感器分别作视网膜和皮肤中的受体,负责将外部的触觉和视觉刺激转化为电信号,两种电信号通过离子电缆传输到突触晶体管,以进行整合并转换为EPSC.他们还制造了一种生物混合神经肌肉接头,用于传输来自BASE 的信号并支配骨骼肌管,进而模仿基于视觉-触觉融合的身体运动控制,如图10(b)所示.如果位于机械手附近的网球可以(或不)传递视觉或触觉反馈来触发机械手抓球,则将其标记为“是”(或“否”),视觉反馈和触觉反馈分别用于区分在z轴和y轴上“是”或“否”,如图10(c)所示.
只有当球在两个方向都处于“是”位置时才能抓住球.与单种感觉相比,融合感觉能够为机械手提供更多维的信息,从而做出更合适的动作.随后又使用融合的视觉和触觉线索来模拟多透明图像识别,只有视觉-触觉融合矩阵才能充分提取形状和透明度,如图10(d) 所示(V:视觉;H:触觉;VH:视觉-触觉融合).这项工作为在神经形态感知和神经形态计算中开发人工多感觉整合神经提供了新的见解,对未来的人机交互、机器人假肢和神经机器人系统具有重要意义.
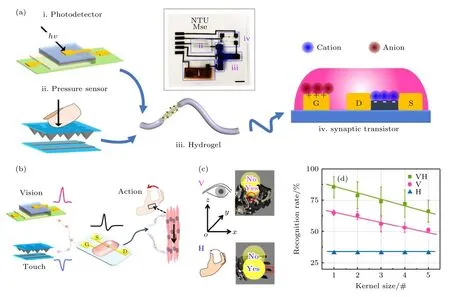
图10 (a) 视觉-触觉融合的双模人工感觉神经元示意图;(b) 用于肌肉和机械手驱动的视觉-触觉融合示意图;(c)视觉(顶部,粉红色)和触觉(底部,蓝色)反馈分别用于在z 轴和y 轴上推断“是”或“否”;(d) 单感觉模式和双感觉模式各自的识别率[158]Fig.10.(a) Schematic illustration of bimodal artificial sensory neuron with visual-haptic fusion;(b) schematic diagram of visualhaptic fusion for muscle and robotic hand actuation;(c) visual (top,pink) and haptic (bottom,blue) feedback used to infer“YES”or“NO”in z-axis and y-axis respectively;(d) the recognition rates of unimodal and bimodal modes,respectively[158].
脑机接口是指在大脑和外部设备之间建立的直接通信通道,这种通信通道不需要肌肉运动就可以完成对用户神经活动的记录和分类,甚至可能参与用户的神经活动.由于神经形态器件具有和生物突触相似的信号传输,所以使用神经形态器件构建的人工神经系统可以根据生物神经系统对生物信号处理后得到的电输出对人工突触的突触权重进行调节.这种突触权重的改变又可以通过人工突触的突触后电流/电位反馈给生物神经系统,影响生物神经系统对生物信号的下一步处理,实现了人工神经系统和生物神经系统的双向信号传输,有希望完美的实现脑机接口功能.所以,由神经形态器件构成的仿生感知系统在生物医学工程、仿生机器人等领域具有极大地应用前景.
7 结论与展望
为克服传统冯·诺依曼计算架构局限性[159−161],在过去十多年中,新概念神经形态器件引起了研究人员的极大关注.以电解质为栅介质层的突触晶体管具有丰富的离子动力学特性,可以很好地模拟生物突触的基本特性.与固态电解质栅相比,液态电解质栅具有更强的耦合能力和更短的响应/恢复时间,也意味着液态电解质栅晶体管具有更低的工作电压和更快的响应速度,但是液态电解质难于集成和封装,在电路集成上可能会有更多的困难.不过随着对突触晶体管研究的不断深入,未来可能出现既具有较快响应速度和较低的工作电压又便于集成和封装的优质电解质材料.铁电晶体管具有稳定性高、开/关比大、编程速度快、权重更新曲线变化小等优点.但是,制备大规模铁电突触阵列所需的高质量铁电薄膜是一个难点,这可能需要铁电薄膜的制备工艺取得突破.此外,该类器件还难以实现优良的短程可塑性,这可以通过减小施加在栅极脉冲的脉宽、幅度和频率来有效缓解.浮栅晶体管通常具有可控且稳定的沟道电导和较大的开/关比,可以很好地模拟突触的长程塑性,但也限制了其在短程可塑性上的应用,使用超薄的隧穿层和窄带隙材料作为浮栅可能是一个解决办法.此外,浮栅晶体管通常还需要较大的工作电压,未来可能还需要探索性能更加优异的高k 材料作为阻挡层和隧穿层来减小工作电压.
目前对于柔性神经形态晶体管的研究仍然局限在单个器件或小规模阵列,开发大规模集成的类脑芯片来处理实际的人工智能任务仍然是个挑战,这对器件的一致性、可靠性、可扩展性都提出了更高的要求.此外,由于生物神经网络是一个高度复杂的三维网络.因此,类脑芯片要实现类似生物神经网络的复杂度,可能需要三维集成技术.具有良好可弯曲特性的柔性神经形态器件为未来智能感知、神经修复、软机器人等领域的发展带来了新的机遇.目前的仿生感知系统还处在比较原始的实验室研究阶段,还只能初步模拟生物对外界环境的传感和响应过程,未来我们还需要进一步优化神经形态器件特性并寻找能够实现多感知融合与集成的技术方案,从而实现超低功耗智能感知系统的实际应用.
猜你喜欢
电子测试(2022年12期)2022-07-18
科学导报(2022年17期)2022-04-02
大自然探索(2021年7期)2021-09-26
考试与评价·高一版(2020年2期)2020-10-29
中学化学(2019年4期)2019-08-06
中学生理科应试(2019年3期)2019-07-08
电子制作(2019年11期)2019-07-04
考试周刊(2016年66期)2016-09-22
国外科技新书评介(2014年6期)2014-12-17
电子世界(2004年5期)2004-07-26
