GNSS/SINS组合导航中多路径效应的识别与抑制算法
2022-08-05 02:34李正帅缪玲娟周志强吴子昊
导航定位与授时 2022年4期
李正帅,缪玲娟,周志强,吴子昊
(北京理工大学自动化学院,北京 100081)
0 引言
在全球导航卫星系统(Global Navigation Satellite System,GNSS)测量中,接收机附近的反射物所反射的卫星信号如果被接收机接收,将和直接来自卫星的信号产生干涉,从而使观测值偏离真值,产生多路径误差,影响GNSS测量的定位精度。这种由于多个路径的信号传播所引起的干涉时延效应被称作多路径效应。在复杂城市环境中,如密集城市区,进行导航定位时,GNSS易受到多路径效应的影响,导航解算误差急剧增大。GNSS定位精度的降低将会严重影响组合导航系统的性能,有效识别和抑制多路径效应对于提高组合导航精度具有重要意义。
抑制多路径误差的方法分布在天线、射频信号处理、数字信号处理和导航测量值处理等多个环节。在接收机内部数字信号处理过程中,可以采取多种措施抑制多路径误差,尤其是对相关技术和相位鉴别器进行改进,能够取得良好的抑制效果。张梦尧深入研究了窄相关技术、小波去噪技术、多径估计延迟锁相环(Multipath Estimation Delay Locked Loop,MEDLL)技术,提出了半软阈值小波抗多径和改进的MEDLL技术,验证了改进算法优于传统算法,但是该文献仅考虑静态定位中的多路径干扰,不适用于运动的情况。张希分析了中级欺骗式干扰和多路径效应的异同点,基于多相关器设计了一套对GNSS虚假信号识别、清除的准则,使接收机在受到干扰或多路径效应时能够有效锁定真实信号,但是该文献缺少在多路径干扰环境及低成本惯性器件条件下的性能测试。这些技术对硬件设计要求较高,在实际组合导航应用中不易实现。
在对GNSS测量值进行分析、处理这一环节,利用接收机记录的信息以及外部传感器和环境信息能够有效识别、减少数据中包含的多路径信息,且易于实现。对多路径效应导致的异常观测值进行有色噪声建模与滤波,可削弱其对组合导航系统定位精度的影响。状态模型不准确引起的估计误差将导致滤波精度下降甚至可能发散,将故障检测与自适应滤波算法相结合能够检测、处理GNSS异常测量值,提高估计精度。一致性检测在车辆导航应用中能够有效抑制多路径效应。B.Ali等基于GNSS和捷联惯性导航系统(Strapdown Inertial Navigation System,SINS)/里程计之间的一致性检测对欺骗信号进行识别,计算GNSS定位与SINS/里程计组合导航之间的距离,判断GNSS信号是否受到欺骗干扰,定期通过真实的GNSS 结果对SINS/里程计的导航结果进行修正。Zhu Z.等设计了两个模块分别用来实时检测GNSS输出的稳定性和组合导航输出的可靠性,结合地图匹配技术,通过试验表明该方法能够有效抑制多路径误差。随着人工智能(Artificial Intelligence,AI)算法的成熟,利用AI算法如神经网络、贝叶斯学习能够对GNSS多路径误差进行识别,但是AI算法计算量较大,在实际使用过程中存在一定的局限性。
多路径效应是复杂城市环境下车辆导航定位的重要误差源,如何有效识别和抑制多路径效应是组合导航研究的热点和难点之一。本文在GNSS/SINS组合导航系统中设计了两层多路径效应识别方法,能够实时检测GNSS输出结果的可靠性和GNSS与SINS定位结果的一致性,具有成本低、易实现的优点。本文提出了一种基于抗野值自适应滤波的多路径误差抑制算法,当检测到GNSS受多路径效应影响时,通过残差加权减弱GNSS野值对滤波更新的影响;当GNSS定位结果正常时,通过限定记忆指数加权的方式计算残差协方差的极大似然最优估计,并采用渐消滤波增加量测信息的利用权重。在多路径效应严重的城市峡谷地区进行车载试验,对采集的微机电系统(Micro Electro Mechanical Systems,MEMS)惯导数据和卫星定位数据进行离线仿真,验证了本文算法对于识别、抑制多路径效应和提高定位精度的有效性。
1 GNSS/SINS组合导航系统数学模型
1.1 状态方程
导航坐标系系选取为当地地理坐标系,轴、轴、轴分别指向东、北、天方向。车体坐标系系的轴、轴、轴分别指向车体的右、前、上方向。
状态变量选取SINS各状态的误差量,共15维,即
=

(1)

根据SINS误差方程与选取的状态变量,离散化可以得到组合导航系统的状态方程为
=,-1-1+,-1-1
(2)
其中,,-1为状态转移矩阵;,-1为系统噪声输入矩阵;-1为系统噪声。
1.2 量测方程
将SINS解算的位置、速度信息与GNSS输出的位置、速度信息分别求差作为滤波器量测值,此时量测方程为
=+
(3)
式中,为量测量;为量测噪声;为量测矩阵,表达式为

(4)
式中,表示6维单位矩阵;表示6×9维零矩阵。
2 多路径效应识别方法
本文结合GNSS测量值和SINS导航解算值,设计了两层多路径效应识别方法,无需复杂的数字信号处理,对GNSS输出结果的可靠性和GNSS/SINS二者定位的一致性进行实时检测。
1)姿态检测:当车辆以一定速度运动时,由于惯性,下一时刻车辆的位置被限制在上一时刻航向的一定范围内。
根据时刻GNSS接收机提供的速度[]计算航向角为
,=

(5)
计算俯仰角为

(6)
-1时刻GNSS/SINS组合导航定位结果解算的航向角为-1,俯仰角为-1。对于GNSS定位结果,当,和-1相差过大,或,和-1相差过大时,即
|,--1|>
(7)
|,--1|>
(8)
判断为GNSS受到多路径效应的影响,存在野值,这种方法用于实时检测GNSS输出结果的可靠性。
在单天线GNSS计算航向角的公式(5)中,当车辆静止或速度很小时,速度误差可能淹没真实速度;车辆做转弯运动时,质心位置的速度和车体前向会存在一定小角度,此时该公式计算的航向角可信度较低。可设置速度大于5m/s,竖向角速度小于10(°)/s,为10°,为10°,然后在此基础上进行调整。
2)检验:在车载GNSS/SINS组合导航系统中,SINS通常作为主系统,并认为其在导航过程中没有发生故障,而GNSS由于受到多路径效应、卫星数变化、接收机自身噪声等多种因素的影响,无法保证定位结果的实时有效性,其在导航过程中可能出现异常测量值,需要设计合理的异常量检测算法实时检验量测信息的有效性。本文采用残差检验法作为GNSS异常定位结果的检测算法。


(9)
的数学期望为
E[]=0
(10)
的方差为

(11)
当GNSS有异常值时,残差发生突变增大。通过检测的统计特性,可以检测GNSS是否出现异常值。

系统正常工作时,,服从自由度为1的分布,即,~(1)。选择适当的虚警概率,根据的函数分布表查到对应于的临界值。正常情况下,,>是概率小于的小概率事件。当,≤时,判定GNSS定位值正常;当,>时,判定GNSS定位值出现异常。
这种方法根据SINS与GNSS输出定位结果的一致性来实时检测导航系统输出的可靠性。
3 基于抗野值自适应滤波的多路径误差抑制算法
在GNSS/SINS组合导航系统中,通常采用卡尔曼滤波将二者的定位信息进行融合,克服了SINS误差不断累积的缺点,提高了系统精度。在实际工程中,噪声统计特性难以准确获取,而且GNSS受到多路径效应的影响会产生较大的定位误差,降低滤波的估计精度,严重时将导致状态的估计值明显偏离真实值,甚至可能引起滤波发散。针对这一问题,本文提出了一种抗野值自适应滤波算法,当检测到GNSS受到多路径效应的影响时,采用抗野值滤波,减弱多路径效应对组合导航的影响;当GNSS定位正常时,采用自适应滤波,提高滤波器的调节能力和滤波精度。
提出的抗野值自适应滤波算法具体如下

(12)
其中,渐消因子矩阵为=diag(,,…,);加权因子矩阵为=diag(,,…,);为系统状态维数,为量测量维数。
适当地选取和,当GNSS定位正常时,调整,增加量测信息的利用权重;当GNSS出现异常值时,减小,减弱错误量测信息对滤波估计的影响。下面给出和的确定方法。
渐消滤波通过开窗法确定滤波残差协方差的估计值,对滑动窗口内的数据进行算术平均。为了提高滤波器对新近量测数据的利用权重,提高滤波残差协方差的估计精度,本文对滑动窗口内的数据进行限定记忆指数加权。
时刻的滤波残差协方差的估计值为




(13)
其中,为窗口大小;为指数因子,0<<1。历史时刻的残差数据离当前时刻越远,在求残差协方差的估计值时所占比重越小。
时刻的滤波残差协方差理论值为


(14)
令

(15)

(16)

(17)
=[diag(,,…,),×(-)]×
(18)
由文献[17]可得

(19)
式中,和分别是和的第个对角线元素。
当判断GNSS量测未受到多路径影响时
=
(20)

(21)

(22)

当-≥0时

(23)
当-<0时
=1, (=1,2,…,)
(24)
中其余不可量测的-个元素设置为1,即=diag(,,…,,1,…,1,…,1),可量测的个状态可以被修正,不可量测的-个状态由于缺乏足够的信息不能被修正。
当判断GNSS量测受到多路径效应的影响时,=,此时滤波残差为
′=
(25)
′,=,
(26)
式中,′,为′的第个元素。
设,中的野值量为,其均值和方差分别为、δ,。
考虑′,的统计特性


=E[,+]
=0+
=
(27)
D[′,]=D[,+]
=,+δ,
(28)
由式(27)、式(28)可以看出,野值使残差的实际统计特性与理论统计特性出现偏差,使滤波过程出现异常,导致滤波效果减弱。
为了抑制GNSS野值的影响,构造加权因子,令

(29)
当GNSS量测量受到多路径效应的干扰时,残差,出现突变,迅速减小以抑制残差的突变,减小当前错误量测量在量测更新中的比重,从而保持导航系统的精度和稳定性。
多路径效应识别与抑制算法流程图如图1所示。对于GNSS与SINS的导航定位结果,基于两层多路径效应识别方法判断GNSS是否受到多路径干扰。当GNSS存在异常测量值时,通过抗野值滤波减小多路径效应对组合导航的影响;当GNSS定位正常时,通过自适应滤波提高滤波器的调节能力。
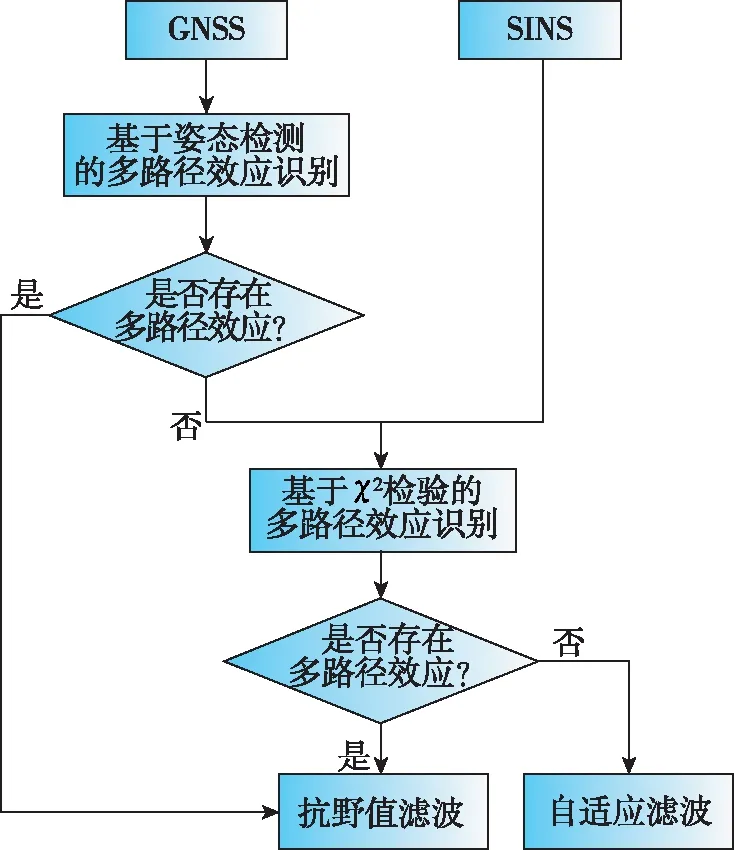
图1 多路径效应识别与抑制算法流程图Fig.1 Flow chart of identification and suppression algorithm of multipath effect
4 试验结果与分析
基于所设计的多路径效应识别与抑制算法,在多路径效应易发路段进行了车载试验,对采集的MEMS惯导数据和卫星定位数据进行离线仿真,验证了算法的可用性与有效性。
4.1 试验条件
车载试验通过LaneTo3低成本GNSS/MEMS-SINS组合导航设备,实现对MEMS惯导数据和卫星定位数据的采集。测试的同时搭载MarsD高精度GNSS/SINS组合导航定位系统作为参考基准,该系统采用紧组合的方式,将MEMS惯导与双天线差分GNSS定位进行组合,定位精度可至厘米级,将其输出的定位结果作为基准用于统计本文算法的误差。
试验路段选在高楼林立、多路径效应易发的北京市中关村地区,行驶过程中车辆机动包括静止、加减速、转弯等各种动作,以确保算法的有效性。车载试验系统如图2~图4所示。

图2 天线安装位置Fig.2 Antenna installation position

图3 低成本组合导航设备Fig.3 Low-cost integrated navigation equipment

图4 高精度组合导航定位系统Fig.4 High-precision integrated navigation and positioning system
4.2 算法验证
行车轨迹如图5所示。

图5 车辆行驶轨迹(基准轨迹)Fig.5 Vehicle running track (reference track)
本文所设计的基于抗野值自适应滤波的多路径误差抑制算法(本文算法)与基于卡尔曼滤波的GNSS/SINS组合导航算法(常规算法),在处理包含多路径效应路段的试验数据后的位置误差、速度误差对比如图6和图7所示。
图6与图7中,蓝色实线为本文算法处理多路径效应后的位置误差与速度误差,红色虚线为常规算法对应的误差曲线。可以看出,在多路径效应易发路段使用本文算法的组合导航系统精度高于常规算法。本文算法与常规算法在多路径效应明显路段的轨迹如图8和图9所示。
图8与图9中,黑色实线为基准轨迹,黑色点状线为GNSS定位轨迹,红色虚线为常规算法定位轨迹,蓝色实线为本文算法定位轨迹。从图8与图9中可以看出,受多路径效应的影响,GNSS定位轨迹出现较大波动,常规算法解算出的定位结果远离基准轨迹,出现明显的误差。本文算法能够有效识别、应对受多路径效应影响的GNSS异常定位值,当在线识别出GNSS多路径误差点后,通过减小残差在量测更新中的权重,减小了GNSS异常定位值对滤波的影响;在GNSS定位正常时,通过自适应滤波提高了滤波器的调节能力,处理后的轨迹更接近基准轨迹。

图6 位置误差对比Fig.6 Comparison of position errors

图7 速度误差对比Fig.7 Comparison of speed errors

图8 多路径效应路段1处理前后对比Fig.8 Comparison of tracks before and after treatment of section 1 with multipath effect

图9 多路径效应路段2处理前后对比Fig.9 Comparison of tracks before and after treatment of section 2 with multipath effect
根据各个时刻两种算法相对于基准轨迹的位置误差和速度误差,由式(30)计算两种算法的均方根误差,结果如表1所示。

(30)
式中,为数据个数;表示第个误差;RMSE(Root Mean Square Error)表示均方根。

表1 常规算法与本文算法的均方根误差对比
上述表明,本文算法相较于常规算法,东向位置误差减小28.28%,北向位置误差减小6.81%,东向速度精度提高15.91%,北向速度精度提高23.91%,在水平方向上定位、定速效果均得到提升。高度误差相对于东向和北向位置误差偏大,这是因为本次试验用于收集卫星定位数据的低成本组合导航设备采用单天线且未接入差分基站,由于多路径效应,高度定位受到较大影响,在整段行车轨迹中卫星原始数据高度值在50~80m之间大幅波动;用作基准的高精度组合导航定位系统采用双天线接入差分基站,其给定基准高度在40~50m之间。本次试验用于组合导航的GNSS量测量整体质量偏差,不能对惯导解算误差起很好的修正作用,但是相较于常规算法,本文算法的高度误差仍有一定程度的减小。
5 结论
在复杂城市环境下,车载GNSS/SINS组合导航系统中的GNSS定位易受多路径效应的干扰,影响组合导航系统的定位精度。本文设计了一种姿态检测与检验相结合的两层多路径效应识别方法,判断GNSS导航数据是否包含多路径误差;在此基础上,为了抑制多路径效应的干扰,本文提出了一种抗野值自适应滤波算法,通过构造渐消因子矩阵与加权因子矩阵,减小了噪声统计特性不准确与异常量测量对滤波的不利影响。在多路径效应明显的城市峡谷路段进行车载试验,验证了本文算法的可行性与有效性。试验结果表明,本文算法对于多路径误差具有较好的抑制效果,能够保持较高的导航精度。
猜你喜欢
心理学报(2022年9期)2022-09-06
农业工程学报(2022年10期)2022-08-22
心理学报(2022年4期)2022-04-12
现代信息科技(2021年21期)2021-05-07
百科探秘·航空航天(2020年5期)2020-05-28
计算机应用(2016年10期)2017-05-12
科技与创新(2015年19期)2015-10-14
科技经济市场(2014年2期)2014-06-20
西安交通大学学报(2009年12期)2009-02-08