
基于自适应模糊控制的超级电容燃料电池车能量管理策略
2022-08-06 03:34汪梦远刘双翼
汽车与新动力 2022年3期
汪梦远 刘双翼
(1.中国科学院重庆绿色智能技术研究院,重庆 400714;2.中国科学院大学重庆学院,重庆 400714)
0 前言
燃料电池车具有清洁无污染、噪声低、效率高等优点,是新能源汽车行业重点研发方向之一。但燃料电池存在动态输出响应较慢且无法回收能量等缺陷,需要引入储能系统进行能量补偿。常用的储能系统包括锂离子电池和超级电容。虽然锂电池的能量密度较高,但用在补充燃料电池功率方面还存在响应慢、操作温区窄等问题,其性能远不如超级电容。超级电容具备功率高、响应快、温区宽、寿命长和安全性高等特点,可以满足燃料电池储能系统的需求。
能量管理策略是燃料电池车的关键技术。能量模糊控制具有设计较为简单,对被控对象精度要求不高,且鲁棒性强的特点,但同时也存在控制精度低,需依赖专家的知识和经验进行分析判断等弊端。针对模糊控制存在的问题,可以将其与其他控制方法相结合,形成切实可行的解决方案。Li 等将模糊控制与小波变换分析方法相结合,将需求功率分为低频部分与高频部分来设计模糊控制器参数,以减少功率波动对燃料电池的损耗;Caux等使用遗传算法对模糊推理系统进行优化,根据负载需求对模糊控制器参数进行了微调。上述方法均取得了一定的成效,但这些解决方案仅从模糊控制器参数的角度出发对相关参数进行调整,因此具有一定的技术局限性。
本研究提出了一种间接自适应模糊控制器,利用模糊控制器调节自适应参数,引入最小二乘卷积拟合算法(Savitzky-Golay)滤波器来减少输出功率的波动。基于美国城市循环工况(UDDS),通过建模对比了Savitzky-Golay滤波自适应模糊控制器与单模糊控制器的控制效果,证明了本研究提出的能量管理策略更为高效和更具适用性。
1 系统与模型
1.1 动力源结构
本研究使用了燃料电池与超级电容并联的动力系统。在该动力系统中,燃料电池提供主要动力,保持持续稳定的输出;超级电容则作为辅助能量源,提供峰值动力,使响应更为迅速。两者分别通过直流转换器(DC-DC)相连来调节功率,并接入直流母线驱动电机,将能量传递到动力系统。
基于高级车辆仿真器(ADVISOR)平台,搭建了燃料电池与超级电容混合动力车仿真模型,并使用该软件提供的相关参数进行了分析。软件提供的相关参数分别为:燃料电池的峰值功率为50 kW,额定功率为35 kW;超级电容组的储存能量为244.8 W·h,最大电压为216 V;整车整备质量为1 360 kg。
1.2 燃料电池模型
燃料电池使用质子交换膜燃料电池电堆,电堆由多个单体电池以串联的形式堆叠而成。燃料电池效率的计算公式为:
(1)
式中,为电堆输出功率,单位kW;H为氢气平均质量消耗速率,单位g/s;LHV为氢气低热值,单位J/kg。
燃料电池系统输出效率的计算表达式为:

(2)
式中,为燃料电池系统输出功率,单位kW;为电堆输出功率,单位kW;为辅助系统消耗功率,单位kW。
燃料电池功率与效率的关系如图1所示。

图1 燃料电池系统功率-效率曲线
1.3 超级电容模型
超级电容采用RC等效电路模型,其中,超级电容的输出电压的计算表达式为:

(3)
式中,为电容电阻,单位Ω;为零位电阻,单位Ω;为静止电容器的端电压,单位V;为动态电容器的端电压,单位V;为终端电阻,单位Ω。
超级电容等效RC电路简化电路形式的模型如图2所示,其中,为静止电容器;为动态电容器。
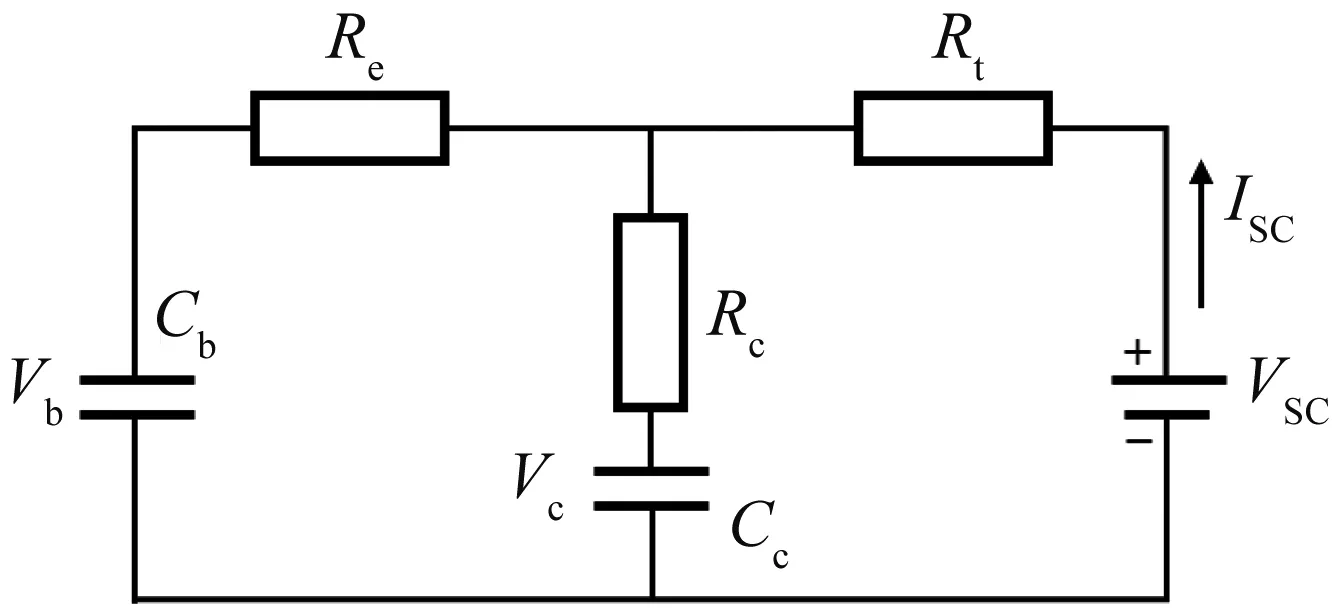
图2 超级电容等效RC电路简化电路形式的模型
1.4 负载模型
负载可看作理想可控电流源,通过电感可描述负载的动态特性,表达感性不确定因素。电感可表示为关于时间的函数:

(4)
式中,()为负载实际电流,单位A;为负载内阻,常量,单位Ω;为电流源内部电流,单位A;为超级电容输出电压,单位V。
2 单模糊逻辑控制策略
模糊逻辑控制是一种将专家经验表示为语言规则,并将其转化为自动的控制行为,利用语言控制规则实现状态变量与作用变量之间的逻辑转换。
模糊控制器以负载需求功率和载电量为输入信号,以燃料电池输出功率与需求功率的比值为输出信号。通过比例因子计算,设置变量的模糊论域为∈[0,1],∈[0,1],∈[0,1]。以VL、ML、L、M、H、MH、VH分别表示很低,中低,低,中,中高,高,很高的状态。以上3种参数的隶属度函数具体如图3所示。
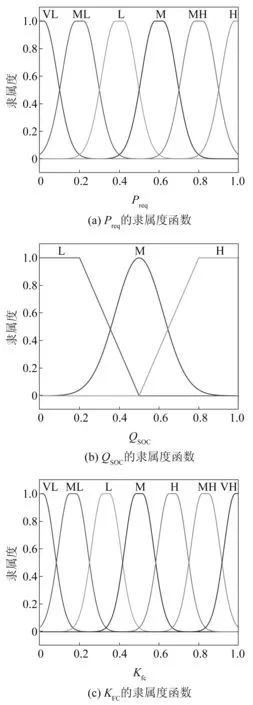
图3 Preq、QSOC与KFC的隶属函数
因此,模糊控制规则总结为:当负载需求功率较大且较大时,可降低燃料电池的输出功率,反之当需求功率较小且较小时,使燃料电池承担主要功率输出元件。模糊控制器状态规则的分类如表1所示。
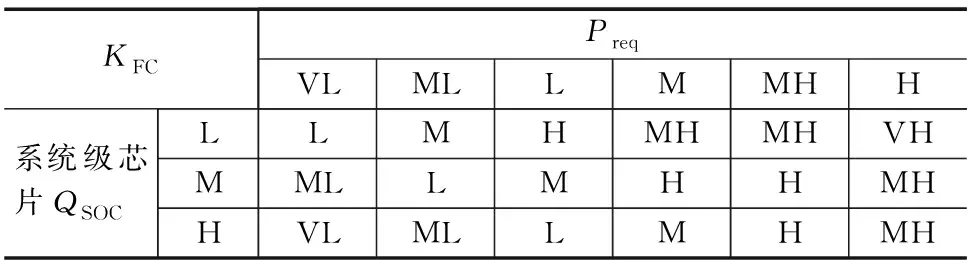
表1 模糊控制器状态规则分类
3 自适应模糊控制策略
模糊逻辑控制需要更为精确的专家经验提高精准度。自适应控制指通过学习被控对象信息,能够不断改进与完善控制作用。考虑到模糊控制器的局限性,本文选取间接自适应模糊控制策略,将自适应控制与模糊控制进行结合。
3.1 设计思路
具体设计步骤如下:① 设计自适应控制器,得到反映燃料电池输出功率对负载需求功率灵敏度的参数;② 设计模糊控制器,调节不同工作状态下的值,实现燃料电池与超容之间合理的能量分配;③ 加入滤波器,利用Savitzky-Golay滤波器对燃料电池输出功率进行平滑处理。
3.2 自适应控制器
燃料电池、超级电容和负载的需求功率的计算表达式为:

(5)
将燃料电池输出功率作为该系统唯一控制输入,自适应控制器的控制输出值()设计表达式为:

(6)

对负载电流设计了自适应律,其具体表达式如下:

(7)
其中,
(8)

(9)

3.3 自适应模糊控制器
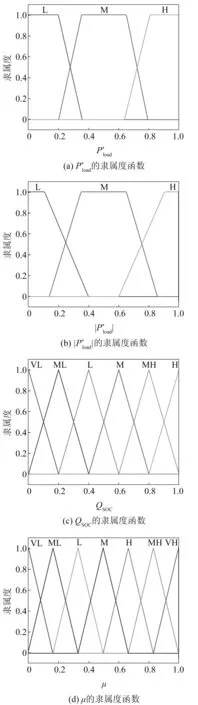
图4 和μ的隶属度函数
车辆运行时的状态可分为:① 制动状态。由超级电容进行能量回收,燃料电池低功率输出。② 正常行驶状态。燃料电池为主能量源,超级电容回收超出负载功率的部分。③ 过载状态。燃料电池额定功率运行,超级电容提供峰值功率。
模糊控制规则总结为:① 制动状态。值较小时,尽可能多的回收能量,并降低值。② 正常驾驶状态。燃料电池对负载变化的敏感度可适当增大。③ 过载状态。值减小,避免损耗燃料电池。模糊控制器的控制规则见表2。
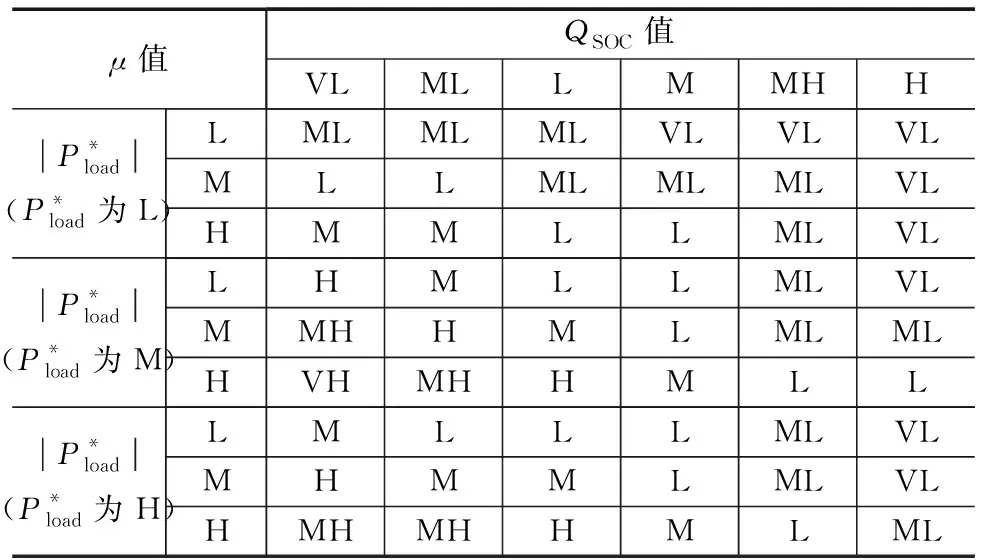
表2 模糊控制器规则
4 结果分析
本研究在UDDS工况下进行仿真测试,将单模糊控制策略(以下简称为“策略一”)与自适应模糊控制配合Savitzky-Golay滤波器策略(以下简称为“策略二”)分别应用于燃料电池车用能量管理。
4.1 整车动力性
车速跟随曲线如图5所示。在策略一中,因峰值功率提供不足及制动能量回收不足,导致车速无法完全跟随。在策略二中,实际车速与需求车速的曲线完全重合,表明实际车速能够完全跟随需求车速。相对于策略一,该策略的整车动力性表现更佳。
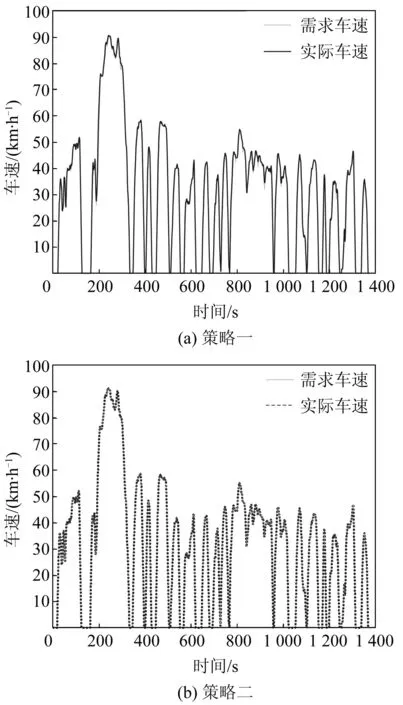
图5 车速跟随曲线
通过动力性能仿真测试,可得到以下结论:在策略一中,当车速从零加速到100 km/h时,其加速时间为17.2 s,车速在30 km/h时的最大爬坡度为30.10°;在策略二中,车速从零加速到100 km/h时,其加速时间为13.9 s,车速在30 km/h时的最大爬坡度为31.28°。与策略一相比,策略二的加速时间缩短了19.19%,在车速在30 km/h时的最大爬坡度提高了15.42%。
4.2 燃料电池功效
燃料电池与超级电容的输出功率如图6所示。超级电容在加速过程中提供了峰值功率,在减速制动阶段回收能量进行充电。策略一的燃料电池输出功率曲线波动明显,策略二的燃料电池输出功率曲线波动总体较为平稳。在制动状态下,超级电容回收能量进行充电。在正常行驶状态下,策略二的输出功率较为平滑;在过载状态下,则由超级电容提供峰值功率,与燃料电池共同为车辆提供能量。
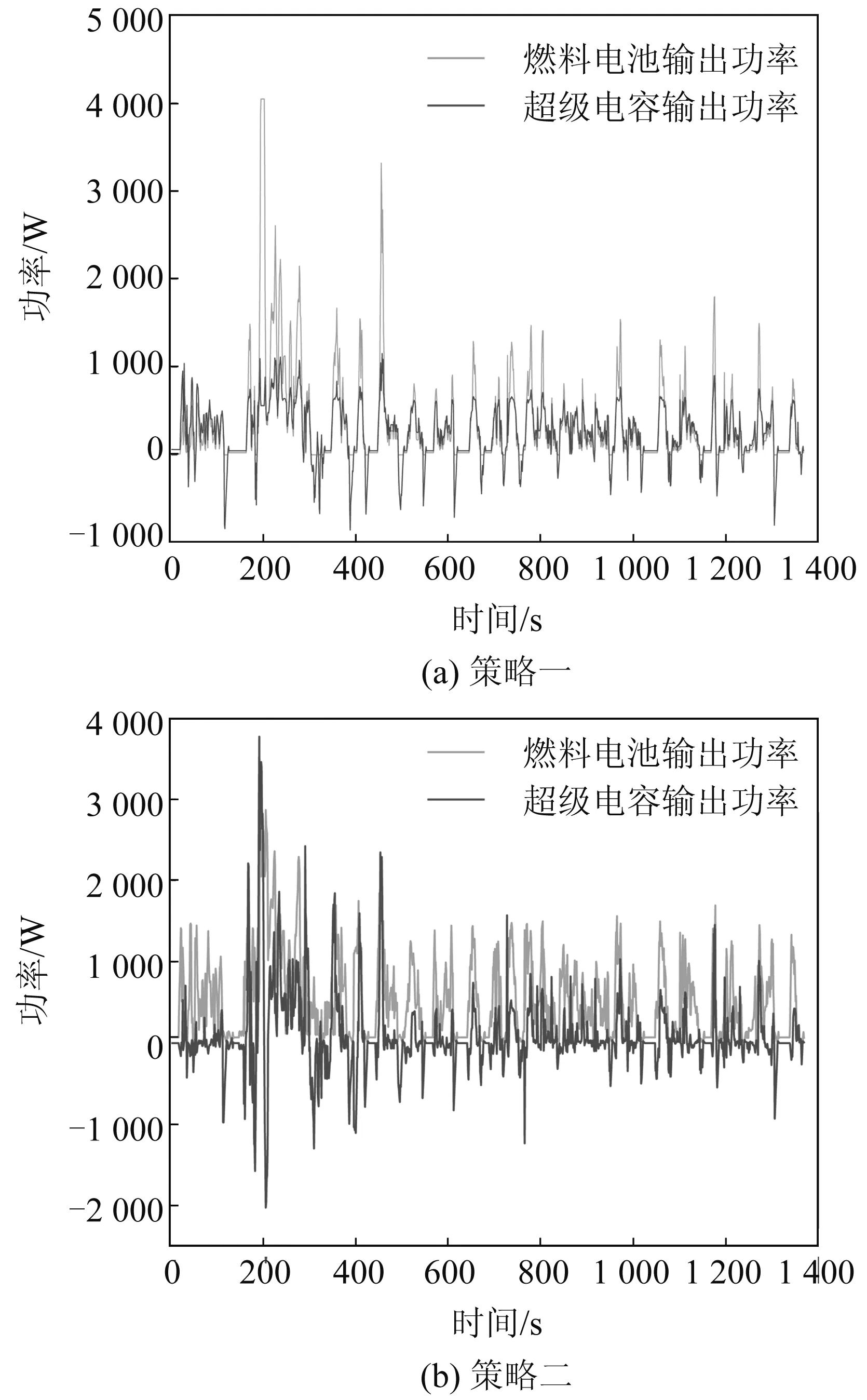
图6 燃料电池与超级电容输出功率曲线
由于策略二可将工况细分为制动、正常及过载等不同状态,同时通过调整超级电容的输出功率,避免燃料电池的输出功率出现剧烈波动。由以上测试结果可知,策略一的燃料电池系统平均效率为51.89%,策略二的燃料电池系统平均效率为54.92%。因此,策略二能够更好地分配燃料电池与超级电容之间的功率输出,改善系统的总体效率。
4.3 燃油经济性
在UDDS工况下,策略一的等效燃油消耗量为每百公里5.5 L,策略二的等效燃油消耗量为每百公里4.8 L。与策略一相比,策略二的等效燃油消耗量降低了12.73%。策略二充分利用超级电容回收能量的特点,减少了能量损耗,提高了能量利用率,实现了更优的燃料经济性。
5 结果与讨论
与策略一相比,策略二在整车动力性、燃料电池功效、燃油经济性等方面更具优势。策略二将负载需求功率分为过载、正常及制动状态,模糊控制器根据不同状态下的功率需求,不断对自适应控制器的关键参数进行优化,调节燃料电池对负载变化的敏感度,合理分配燃料电池与超级电容之间的功率。燃料电池在车辆运行时充分发挥主能量源的作用,该自适应模糊控制策略能够更好追踪负载需求,提供需求的平均功率。通过引入Savitzky-Golay滤波器来调整燃料电池对负载的敏感度,可在保证正常行驶要求的情况下调节燃料电池的输出功率,使其始终在高效率区工作。与单模糊控制策略相比,自适应模糊控制策略配合Savitzky-Golay滤波器,能更好地分配燃料电池与超级电容之间的功率,满足整车动力性、燃料电池功效及燃油经济性三者的整体技术要求。
6 结语
本文以配备有超级电容储能系统的燃料电池车为研究对象,开发了更为高效的能量管理策略。在广泛采用的模糊控制基础上,引入Savitzky-Golay滤波器,设计车辆自适应模糊控制能量管理策略。基于UDDS工况,对该策略进行了研究,并与单模糊控制的能量管理策略进行了对比分析。结果显示,本研究设计开发的自适应模糊控制策略的实际车速完全能够跟随需求车速;燃料电池输出功率更为平稳;燃料电池平均效率提高了5.84%,等效燃油消耗量降低了12.73%。采用自适应模糊控制策略能在车辆反复启停的工况下实现更为灵敏的动力响应和有效功率分配。Savitzky-Golay滤波器的引入在有效增加动力响应性的同时,也减小了燃料电池输出功率的波动性,从而起到了保护燃料电池的作用。总之,对于具有超快响应和超高功率要求的超级电容储能系统,采用高效自适应的模糊控制管理策略更为合适。该策略能很好地整合燃料电池和超级电容储能系统,是极具开发潜力的车用能量管理策略。
猜你喜欢
时代汽车(2022年17期)2022-09-06
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
汽车杂志(2018年6期)2018-06-25
作文周刊·小学一年级版(2017年27期)2017-08-10
神州·中旬刊(2017年1期)2017-06-28
科技视界(2016年18期)2016-11-03
计算机辅助工程(2016年3期)2016-08-01
现代电子技术(2015年17期)2015-09-23
现代电子技术(2009年13期)2009-08-31
