
大直径零件机器视觉转角测量标定方法
2022-08-08 02:26丁鹤华段振云
机械管理开发 2022年7期
丁鹤华, 杜 坡, 段振云
(沈阳工业大学机械工程学院, 辽宁 沈阳 110870)
引言
随着我国制造业水平的不断发展,大型成套设备广泛应用于机械、交通、电力、矿山、建材等多个重要方面。角度测量作为机械产品几何量测量的一个重要分支,广泛应用于军事装备、自动控制、机械制造、医疗器械等领域,其加工检测精度直接影响产品的质量和寿命。
目前国内外角度测量装置运用的测量方法主要有机械测量法、电磁测量法和光学测量法等[1],其中机械及电磁测量法均为接触式测量方法,不可避免地对零件表面造成划痕;光学测量法测量精度高,但在角度测量方面测量范围小,系统调试烦琐,应用领域较窄。随着计算机技术和工业相机的发展,机器视觉测量作为一种新兴的非接触式测量手段,具有体积小、可靠性高、可实时测量等优点,逐渐成为一种重要的测量手段,广泛应用于空间运动分析、距离测量等领域[2]。
采用机器视觉的角度测量方法主要是通过在待测物上安装辅助的特征标志,使用相机采集辅助目标图像,通过图像处理获取被测物的旋转角度,常用的特征标志有平行光栅、直线、特殊曲线等[3]。因此,在机器视觉测量中特征标志、标定方式的选取对测量精度有很大影响。
本文针对机器视觉对大直径零件回转角度在机测量采用大尺寸标定板,其成本较高、加工难且测量所需图像信息为双目视觉下小视场图像,提出一种针对该测量系统中转角测量基准板的标定方法,采用两块小尺寸标定板间距安装的方式,通过坐标转换算法实现两块小尺寸标定板坐标系的统一,以代替大尺寸标定板。
1 机器视觉转角测量原理
大直径零件机器视觉转角测量系统主要由CMOS 工业相机、双远心镜头、转角测量基准板、二维点阵标定板以及照明系统组成,如图1 所示。

图1 测量装置结构图
转角测量基准板固定在待测回转零件上随其回转,以二维点阵标定板为特征标志物,通过对双目相机回转前后两次拍照,由两相机视野中心点在世界坐标系下坐标连线,计算回转前后该连线l1、l2斜率变化,以测量其回转角度,其原理如图2 所示。
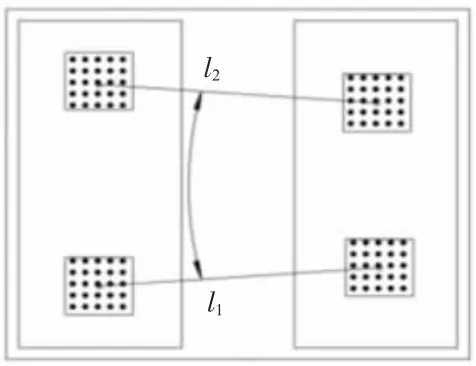
图2 测量原理图
2 转角测量基准板结构
本次转角测量中的特征标志物为转角测量基准板,其结构如图3 所示。转角测量基准板靠近内侧处设计四处定位孔,用于确定标定板相对安装位置,二维点阵标定板分别安装于两侧,并在下方安装平行背光源。

图3 转角测量基准板
3 转角测量基准板标定
对转角测量基准板标定主要包括像素当量标定以及二维坐标系的转换,其中二维坐标系转换包括像素坐标系到标定板坐标系的转换以及单侧标定板坐标系到转角测量基准板物理坐标系的转换。
3.1 像素当量标定
像素当量,是机器视觉测量系统的重要参数之一,其标定精度直接影响测量精度[4],因此在采集实际测量所需图像信息前需对像素当量进行标定。相机标定一般可分为传统标定方法、主动视觉中的标定方法和自标定方法三类。主动视觉中的标定方法需要精确控制摄像机的移动轨迹,通常实现难度较大,一般运用于一些特定场合;自标定方法虽然实现起来较为灵活方便,但标定结果稳定性不高;传统标定方法是用具有确定结构信息的标定物,通过图像处理技术对相机内外部参数标定的,具有通用性好、精度高等优点[5]。因此本文标定方法采用传统标定方法,来计算相机模型中的内部参数和外部参数,即像素当量的标定。
3.2 二维坐标系转换
为实现两块标定板坐标系的统一,两侧需进行两次坐标变换,即像素坐标系到标定板物理坐标系的坐标转换及两块小尺寸标定板坐标系到转角测量基准板坐标系的坐标转换,即可实现双目机器视觉下由图像像素坐标系到转角测量基准板坐标系的转换。由于两侧坐标转换方法相同,本小节只介绍单侧坐标转换方法。
对单侧标定板拍照,通过对以距视野中心最近点为中心的5 行5 列25 个标定点作为标定区域,以标定点圆心距标定像素当量。首先,对采集到的图像进行高斯滤波处理,达到降噪效果,通过逻辑回归算法对标定点亚像素边缘进行定位,以最小二乘法拟合标定点圆心像素坐标,由于越远离视野中心镜头畸变越大,所以选取距视野中心最近的5 行5 列标定点的横纵两方向计算像素当量,根据其分布规律,调节相机角度,直至达到相对理想效果。
为实现本文两次坐标转换参数的计算,采用四参数坐标转换方法,其转换模型如式(1)[6]。

式中:(X,Y)表示转换后的坐标;(x,y)表示转换前的坐标;(DX,DY)表示平移参数;m 为尺度因子;θ 为旋转因子。
四参数坐标转换所需参数需至少转换前后坐标系下两个以上同名点坐标,坐标精度直接影响转换精度,两次坐标转换原理,如图4 所示。第一次坐标变换由像素坐标系到标定板物理坐标系,考虑到镜头畸变对标定点边缘提取精度的影响,采用距视野中心最近点及次近点为中心的25 个标定点像素坐标的平均值作为该两点圆心像素坐标(X1,Y1)、(X2,Y2),以该两点像素坐标与其在标定板上对应点物理坐标(x1,y1)、(x2,y2),计算第一次坐标转换参数。第二次坐标转换由标定板坐标系到转角测量基准板坐标系,将转角测量基准板坐标系定义为世界坐标系,由第一次坐标转换参数可根据定位孔处图像计算定位孔圆心对角连线交点坐标在标定点坐标系下物理坐标(xk1,yk1)、(xk2,yk2),定位孔处图像如图5 所示,以该物理坐标与三坐标测量机测得的两处定位孔圆心对角连线交点的物理坐标(xw1,yw1)、(xw2,yw2)计算第二次坐标转换参数。

图4 坐标转换原理图

图5 定位孔图像
4 标定实验
本次标定实验中,通过三坐标测量机测得的基准板定位孔物理坐标实现坐标系统一,由于两侧标定板采用相同标定及坐标转换方法,本次实验平台仅对单侧相机标定即可。标定平台由CMOS 相机、远心镜头、二维点阵标定板、转角测量基准板、平行背光源以及光强控制器组成,如图6 所示。

图6 机器视觉实验平台
本文实验采用分辨率为2248×2048 的CMOS 黑白相机、畸变率<0.1%双远心长焦镜头、LED 白色光平行光源和数字光强控制器等搭建的视觉测量系统,实现对单侧标定板的二维点阵标定点图像的采集。
像素当量根据距视野中心最近25 个点的标定区域内,以标定点横纵两方向圆心距的物理尺寸与像素尺寸平均值的比值求得,见表1。

表1 像素当量标定结果
运用亚像素边缘检测算法,得到的基准板上定位孔的直径与三坐标测得的理论值作对比,确定光照强度。
计算两次坐标转换参数所需同名点坐标,见表2。
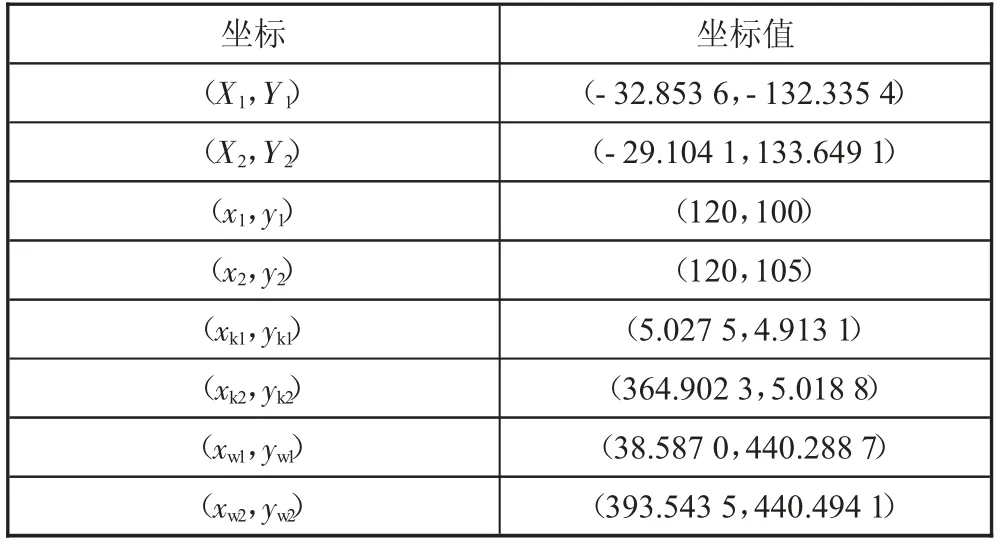
表2 同名点坐标值
由表2 中同名点坐标值计算,两次坐标转换的参数,见表3。
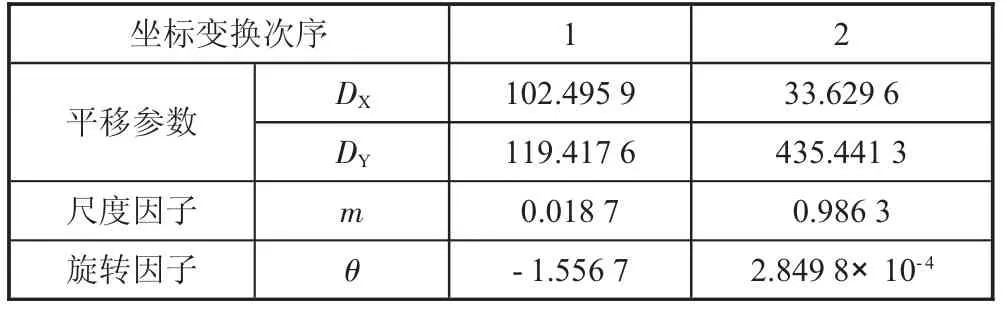
表3 两次坐标转换参数
通过该参数,可实现由像素坐标系到单侧标定板坐标系,再由单侧标定板坐标系到转角测量基准板坐标系的坐标转换。以此方法,可计算另一侧标定板两次坐标转换参数,可实现两标定板在转角测量基准板坐标系的统一。
5 结语
本文大直径零件转角测量中用到的转角测量基准板标定方法,可实现两块小尺寸标定板坐标系的统一,且基准板可根据实际需求对尺寸进行设计,坐标转换的精度及两个同名点的精度,提高定位孔处加工以及该处边缘提取精度,进而提高坐标转换精度,对于整个标定参照物的精度都将有所改善。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
好日子(下旬)(2020年6期)2020-08-04
装备环境工程(2020年2期)2020-03-23
模具制造(2019年10期)2020-01-06
劳动保护(2018年8期)2018-09-12
北京航空航天大学学报(2017年5期)2017-11-23
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
读者·校园版(2015年7期)2015-05-14
燃气轮机技术(2014年4期)2014-04-16
