
复杂海洋环境下运动目标回波信号建模及仿真*
2022-08-10 04:57赵显文陈洲王正伟刘志刚胡鹏鹏王梦馨
移动通信 2022年7期
赵显文,陈洲,王正伟,刘志刚,胡鹏鹏,王梦馨
(四川九洲电器集团有限责任公司,四川 成都 621000)
0 引言
当今,无人水下航行器(UUV,Unmanned Underwater Vehicle)已成为世界各国海军争相研制的“热点”装备,广泛地应用于水下战场侦察/监视、情报收集、预警探测、通信中继、环境调查、有效载荷预置、水声对抗、目标感知与识别、猎雷、布雷、跟踪等领域[1]。
由于辐射特征较弱,传统的被动声纳很难奏效,必须依靠主动声纳发射大功率声波照射目标进行探测[2],因此主动探测仿真中目标回波信号的构建十分重要,是后续信号处理的基础[3-5]。文献[6-7]针对主动声纳接收信号的建模开展研究,依次对海洋混响、海洋环境噪声、目标亮点进行了建模,但并未考虑信道多途的影响。文献[8]考虑了多途信道的影响,但在目标亮点模型建模中考虑的因素较简单,忽略了散射亮点带来的幅度变化,且各段仿真信号参数分置。
1 复杂海洋环境下运动目标回波模型构建
在对主动声纳系统进行技术论证或者对实时仿真系统进行评估时,目标回波信号是主动探测信号处理的基础,因此接收端目标回波信号的构建具备重要意义[9]。传统的目标回波建模考虑条件较为简单,大多基于自由场条件假设,其建模方法如图1所示:
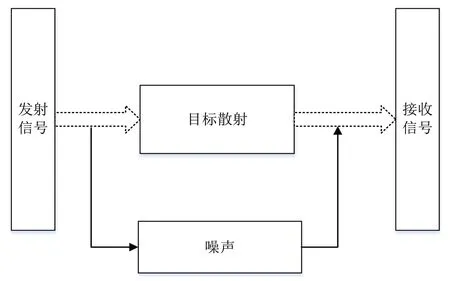
图1 自由场建模示意图
由于UUV的广泛应用和其执行的特殊任务,其工作环境通常较为复杂,传统的自由场假设不再适用,建模时必须考虑其工作条件。UUV通常工作于浅海条件,除目标散射以及环境噪声的影响外,必须考虑界面与水中散射体带来的混响干扰,以及界面带来的多径影响,此外高速运动还会带来多普勒影响,必须对目标回波进行精细化建模,这对于后续目标的检测、定位、分类、跟踪、识别和参数估计具有重要意义。本文根据UUV工作环境特点,分析复杂海洋环境下运动目标的回波信号构建方法,并进行信号级仿真,建模思路如图2所示:
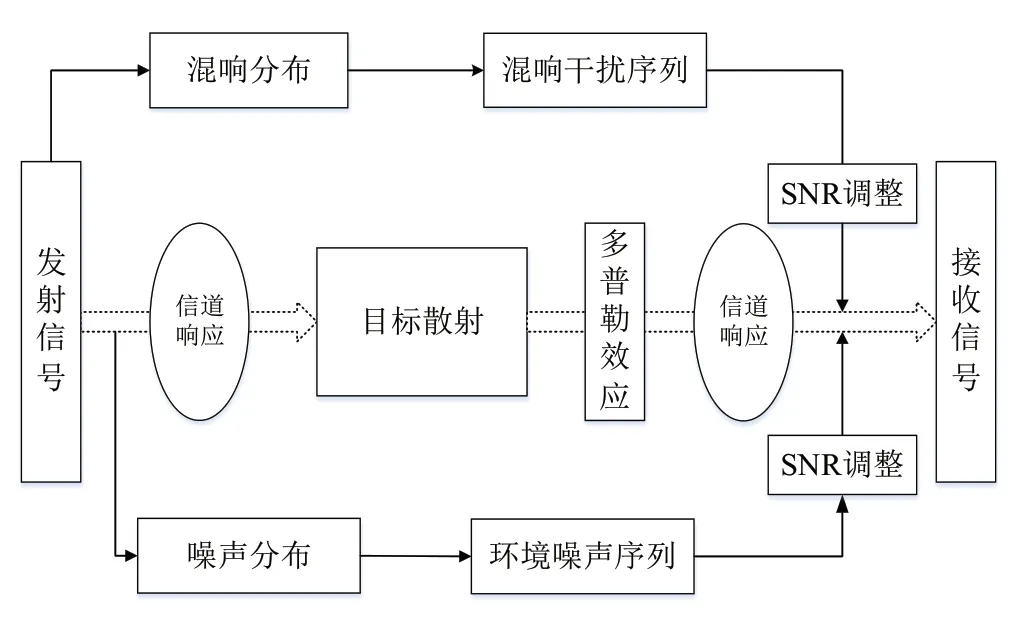
图2 复杂海洋环境建模示意图
1.1 传输信道模拟
在传播过程中,海洋就是声信道,理想的信道能无畸变地传递信息,海洋不是理想的信道,而是复杂多变的,它相当于一个随机的时变、空变滤波器,对声源发出的信号进行变换[10]。在实际海洋环境下,接收到的目标回波因水声信道的复杂性而常常与发射信号有较大的差别,使得信号产生畸变的因素有很多,主要是海面海底的反射、水介质的随机扰动、介质不均匀以及界面随机起伏等。在工程上,声信道可以看作缓慢时变的相干多途信道[11]。声信号从声源发出,沿第i条途径到达的信号幅度记为Ai,沿第i条途径到达的信号时延记为τ0i,相干多途信道的系统函数为:

根据声速分布和海面海底特性计算得到该信道特性下的本征声线,从而确定信道冲激响应。本文为简化计算,假设去程信道与回程信道相同。令水深200 m,声源位于水下10 m,接收点也位于水下100 m,声源与接收点距离4 km,频率为10 kHz,声速剖面选取Munk模型,波束开角为±14°,则仿真结果如图3、图4所示:
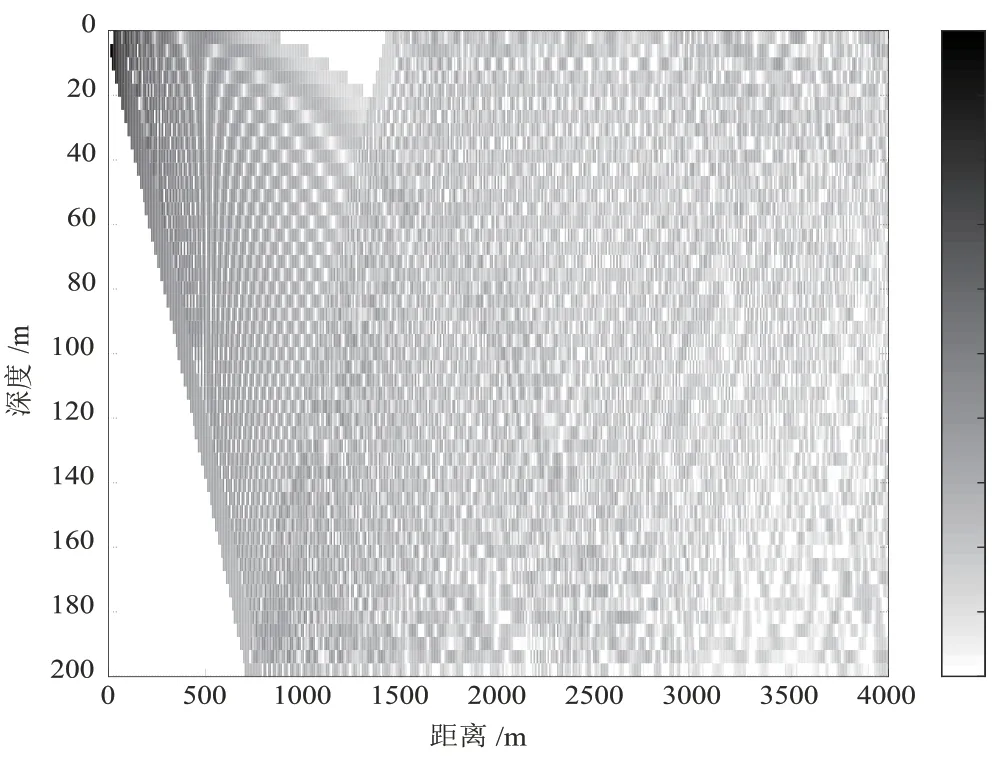
图3 海洋信道传播损失
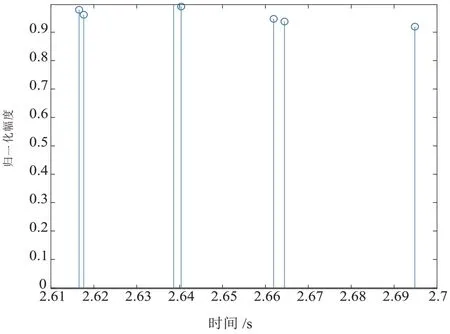
图4 海洋信道冲激响应
图3采用射线理论给出了声传播过程中传播损失分布,从图示可明显看出声传播过程中存在明显多径现象,而且影区较为明显,传播损失在空间上分布并不均匀。图4则计算了信道本征声线归一化幅度,该信道下声线传输具备明显时延,接收点处幅度也存在明显差别,这也反映了复杂海洋环境下信道特性对声传播具备显著影响。
1.2 环境噪声模拟
海洋环境空间物理特性复杂,特别是浅海环境噪声具有噪声源复杂、统计分布多样、声源多变的特性,在特定的时间和地点,噪声级取决于多个噪声源的混合[12]。由于环境噪声这种时空变化性,很难用一个“全能”的数学模型精确描述,很多情况下根据实测环境噪声,归纳总结经验公式来进行近似的描述[13]。海洋环境噪声在一定范围内可以看作是一个随时间变化的服从正态分布的随机信号,由于环境中的噪声源通常是不相关的,因此总噪声的振幅被认为是正态分布的。假设声纳搭载于UUV等平台,UUV辐射噪声相比大型舰艇较小,因此无需考虑自噪声影响,海洋环境噪声模拟流程如图5所示:
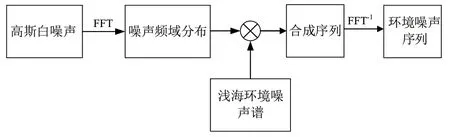
图5 环境噪声模拟流程
根据以海况表示的浅海噪声谱级经验公式[14],其形式为:

式中NL表示噪声谱级,f表示频率,S表示海况等级。
海洋环境噪声模拟如图6所示:
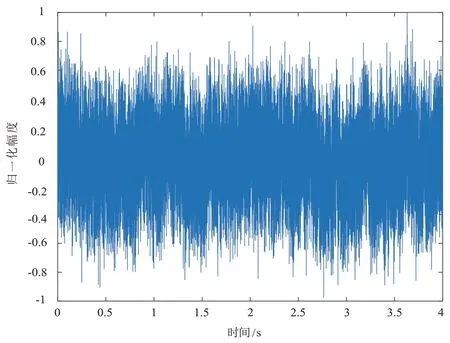
图6 海洋环境噪声模拟
1.3 海洋混响模拟
海洋混响指声波传播过程中由起伏海面、不平整海底及海水介质内部大量随机不均匀体上的散射在接收点产生的声信号[15]。对于浅海主动声纳,混响是干扰其性能的主要因素[16]。由于发射信号本身的特性和海中散射体分布等,混响不同于普通的环境噪声,在频域上覆盖的区域与发射信号基本重合,时域上与发射信号以及目标回波强相关,它是一种特殊形式的干扰[17]。
作为大量散射波叠加总和的混响,是一个随机过程,且具备一定的统计特性。混响过程较复杂,受到多种因素的影响,必须对其进行简化,即忽略面元或体元尺度范围内的传播效应;声线不发生弯曲;不考虑散射体的多次反射;散射体数量极多,在任一体元或面元内都有大量散射体;每一散射体都对混响有相同的贡献。令v(t)为发射信号波形,ti和ai表示第i个散射体产生散射声的时刻和散射声的振幅,则t时刻的混响信号表示为:

若散射声波形和入射声信号保持一致,其信号的瞬时值满足正态分布规律,概率密度函数为:

混响信号的振幅服从瑞利分布,其概率密度函数具有以下形式:

将发射信号的混响看作多个端脉冲产生的混响的累加,混响强度可以表示为:

式中R0为系数;β是指数衰减系数,与海水吸收和边界损失有关;m与传播条件有关。根据混响的统计模型与混响强度可得到模拟混响。混响信号的仿真流程如图7所示:
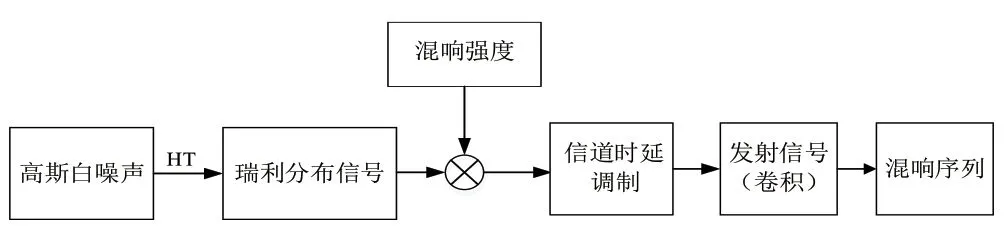
图7 混响模拟流程
假设发射信号为LFM信号,脉冲宽度为0.04 s,中心频率为10 kHz,带宽800 Hz,仿真得到的混响信号如图8所示。由于混响信号并不是平稳随机过程,在分析统计特性前需进行平稳化处理,混响信号平稳化处理后统计特性与瑞利分布理论值对比如图9所示。

图8 混响信号模拟
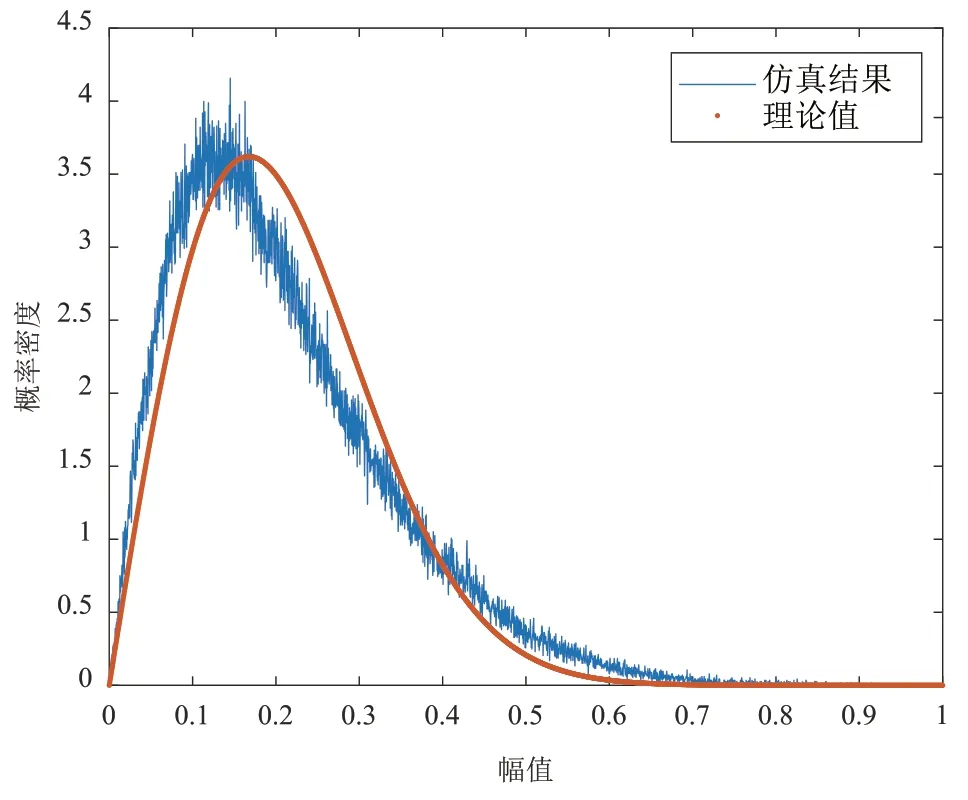
图9 混响平稳化统计特性
图8根据分析得到的混响特性进行混响信号的模拟,给出了时域波形,由于混响信号与发射信号存在密切关系,因此在图9中对其分布特性进行了统计,仿真结果与理论值复合较好。
1.4 目标亮点模型
目标回波是目标在入射声波激励下产生的一种物理过程,回波中携带有目标的信息,这些信息是主动声纳实现探测与识别的基础。大部分情况下,作为激励源的入射声波是小振幅波,回波的形成服从线性声学规律,与初始时间无关。从工程应用的角度,可将目标看成一个线性时不变系统,回波就是目标对入射声波的响应,而信道的作用主要体现在传递函数上。
亮点模型[18]是在入射声为高频、限带信号条件下,总结理论和实验研究结果得出的,在工程上具备一定的应用价值,主要用来估计复杂几何形状目标的目标强度和理论上模拟目标回声信号。根据回声产生机理,亮点分为“几何亮点”和“弹性亮点”。每个亮点回波信号都可以看作是对入射信号的时延拷贝,目标的单亮点传递函数可写成:

式中A(r,ω)表示幅频响应,随入射信号频率变化;r为声波入射方向矢量;τ为目标亮点与接收点间的时延;φ表示相位因子。
多个亮点叠加的复杂目标的回波传递函数可表示为:

在工程上获得的回波信号,在信号特性上可表示为随不同入射角度变化的参数组合[19],即Am(r,ω)、τm、φm。
对于幅度散射因子,因为环境和目标物的差异导致很难给出确定的表达形式,其可近似为:

式中Ts,i为单个亮点的目标强度,因此,根据亮点数量,可分别求出单个亮点目标强度,然后计算得到幅度反射系数。
球冠与有限长圆柱壳体的结构是水下典型结构,其模型如图10所示:
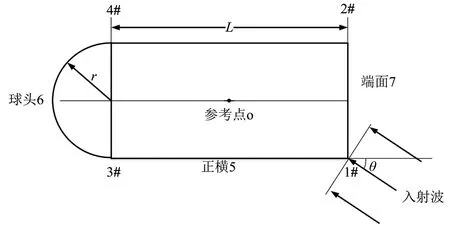
图10 声波入射示意图
几何类回波包括镜反射波和棱角波,可通过物理声学的方法预测,声波倾斜入射时,半球/圆柱镜反射回波及棱角反射回波目标方位角及相对目标旋转中心时延分别如表1、表2所示:

表1 斜入射时镜面反射回波方位角和时延

表2 斜入射时棱角反射回波方位角和时延
其中A表示模型柱半高,B表示模型半径,c0表示水中声速,θ0=arctan(B/A),θ表示目标方位角,α=arccos(cos(φ)cos(θ)),φ表示换能器倾斜角。其中:。
假设模型柱长度为30 m,柱直径为5 m,入射角度为45°,信号为10 kHz的LFM信号,脉宽为0.04 s,图11中3条红色虚线分别代表亮点1、2、3出现时刻:
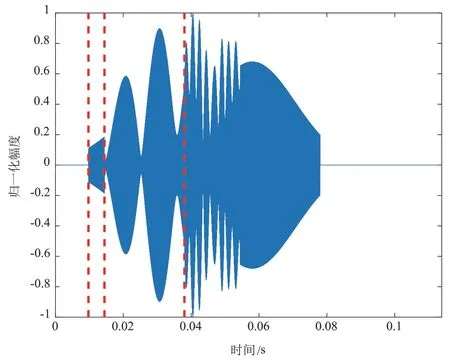
图11 亮点回波信号
图11为根据目标亮点模型分析得到的发射信号经过目标调制后得到的回波时域波形,可看出发射信号经目标调制后,波形上与原始发射信号具备明显差别,主要表现为时域上信号的延长以及波形幅度的变化。
1.5 多普勒补偿
声纳与目标间的相对运动会使接收信号的波形发生改变,变为信号的频移,称之为多普勒频移现象[20-21]。运动目标的多普勒效应是一种常见物理现象,目标与声纳之间的相对运动会导致信号复包络的时间比例发生变化和载频移动。
对于窄带信号,信号复包络变化影响可忽略不计,多普勒效应可视为简单的载频偏移,多普勒频移fε可表示为:

若发射信号为s(t),目标反向运动,则接收信号为:

2 回波信号模拟
根据UUV工作条件,本文分析了复杂海洋环境下运动目标回波信号建模方法,综合考虑了信道多径、混响干扰、环境噪声、亮点模型、多普勒补偿等一系列因素,对每部分进行仿真模拟,并将各因素叠加,得到目标回波信号如图12所示:
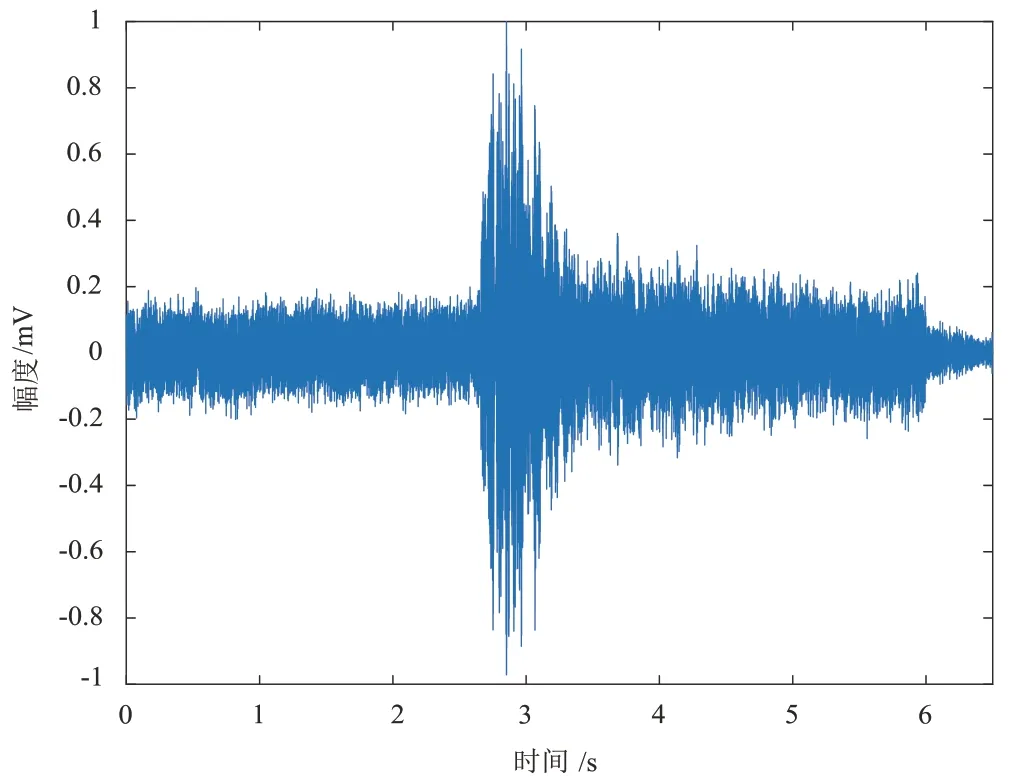
图12 多基地声纳模拟信号
3 结束语
本文针对复杂海洋环境运动目标主动探测回波信号模拟的需求,分析了复杂海洋环境下搭载平台为UUV的回波建模方法,综合考虑了海洋环境噪声、浅海混响干扰、信道多途传播、运动目标多普勒效应等因素,结合目标声散射理论和亮点模型,构建了要素齐全、高效可靠的回波信号仿真模型。仿真结果表明:该模型可用于复杂海洋环境下的目标回波信号精细化建模,为主动探测回波信号处理奠定重要基础,有效避免了常规自由场假设条件过于简化而无法刻画复杂海洋环境特征的问题,也避免了数值积分需要大量运算从而无法进行实时仿真的问题。
猜你喜欢
电讯技术(2022年1期)2022-02-12
无损检测(2019年11期)2019-11-20
电子制作(2018年23期)2018-12-26
测控技术(2018年11期)2018-12-07
舰船电子工程(2018年11期)2018-11-26
剧作家(2018年2期)2018-09-10
石油地球物理勘探(2017年2期)2017-11-23
城市勘测(2016年2期)2016-08-16
海洋科学进展(2016年3期)2016-08-12
中国卫生标准管理(2015年16期)2016-01-20
