
铁路无人道口智能安防机器人的研发与应用
2022-08-12 09:30楼向东姜宪宪陈德伟祝石林孟祥忠
工业仪表与自动化装置 2022年4期
楼向东,姜宪宪,陈德伟,祝石林,孟祥忠
(1.兖矿能源股份有限公司铁路运输处,山东 邹城273500;2.青岛科技大学 自动化与电子工程学院,山东 青岛266100)
0 引言
我国大部分的矿区铁路有人看守平交道口由值班人员瞭望来确定道口两侧的车况,在大雾等恶劣天气中,能见度较低,容易瞭望判断不及时引发安全事故,随着科技的发展,我国提出了“智能制造”的国家发展战略,集物联网、目标检测[1]、智能监测和远程监控为一体的智能安防机器人[2]应用到矿区铁路无人值守道口。在铁路运输中,道口是安全生产的薄弱环节,是铁路运输的高危地段,道口安全直接威胁到过往群众的生命财产安全。采取更加有效技术的措施,保证矿区铁路无人看守道口运输安全已迫在眉睫。本文研发的无人看守道口智能安防机器人能够实现无人道口虚拟有人监护,通过目标检测能够实时对道口两侧路况进行监控;机器人本体装有多路传感器[3],能实时反应机器人的工作状况。同时开发了监控中心管理平台,可对无人道口智能安防机器人进行管理和监控。
1 智能安防机器人的总体结构
无人道口智能安防机器人道口机器人总体结构图如图1所示,分为四部分,第一部分为供电部分,采用风光互补发电[4]给机器人供电,风力发电机、太阳能板接至风光互补发电控制器转化成DC72 V,后接至蓄电池组与隔离电源,隔离电源将DC72 V转化为DC12 V,DC12 V用于给通信控制板、控制主板供电。第二部分为通信控制部分,采集多路传感器数据,通信控制板外接有温度传感器、门磁传感器、振动传感器、烟雾传感器、蓄电池传感器与声光报警器。该通信主板通过RS485通信线与控制主板相连。第三部分为主控制部分,控制主板外接两路智能识别摄像机、无线网桥、4G模块、GPS/北斗模块。实现道口智能识别摄像机视频图像的采集、处理、记录。第四部分为智能识别摄像机,实现对道口行人、车辆的监测。
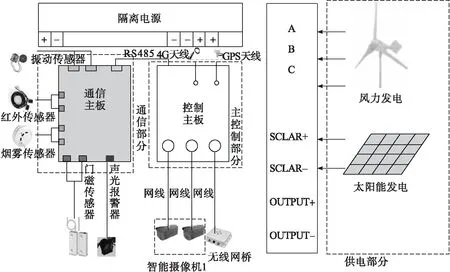
图1 总体结构图
2 无人道口智能安防机器人的工作原理
无人道口智能安防机器人通过智能识别摄像机[5]对跨越铁路道口的人员及车辆进行目标检测,视频图像通过无线网桥传输到机车车载终端,当检测到有行人或车辆通过且有机车接近道口时,控制主板控制连接声光报警器的继电器吸合,打开声光报警器。控制主板与数据采集与通信主板,读取监测到的道口风光互补供电系统运行参数(包括蓄电池)和榙杆上的监控箱及电池箱等设备本体受到偷盗、破坏等袭扰信号,通过4G网络通讯,实现无人看守道口智能安防机器人与平台之间的信息互联,从而实现对道口设备的管理。其工作流程图如图2所示。
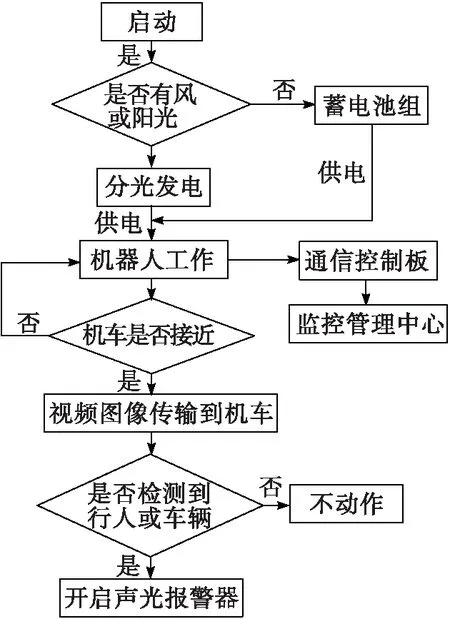
图2 工作流程图
3 无人道口智能安防机器人的系统组成
无人值守道口智能安防机器人系统包括目标检测与识别系统、监测系统、控制系统、风光互补发电系统。目标检测与识别系统负责检测道口两侧的行人或车辆;监测系统负责监测机器人本体重要设备的工作状况;控制系统负责控制机器人动作;风光互补发电系统负责给机器人供电。
3.1 目标检测与识别系统
目标检测与识别系统主要由智能识别摄像机组成,可实现视频智能分析、道口人车识别、视频回放以及实时抓拍功能。智能识别摄像机内置YOLOv5目标检测算法[6],通过大量真实的场景样本训练后,能够在各种应用场景下及时准确的对场景中发生的物体入侵行为发出告警信息。通过对实时视频图像进行智能分析识别,可实现图像全屏周界防护、划定区域周界防护等功能。以YOLOv5s为基础进行设计YOLOv5s网络结构包括四部分:输入端、骨干网络、Neck网络、Head输出层,网络结构图如图3所示。
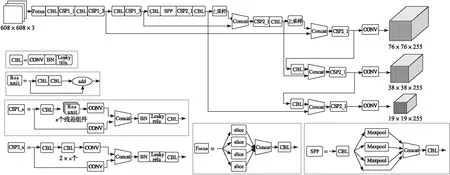
图3 YOLOv5网络结构
训练模型过程中首先输入端对输入图像进行Mosaic数据增强、自适应锚框计算、自适应图片缩放等一系列操作增加训练集提高网络的推理速度。处理后图片送入骨干网络中,骨干网络由Focus结构与CSP结构组成,Focus模块用于对输入图像的切割;CSP结构有两种,在主干网络中应用CSP1_X结构,在Neck网络中应用CSP2_X结构。Neck网络由FPN+PAN结构组成,特征图金字塔网络主要用于解决目标检测过程中出现的目标多尺度问题,在基本保持原有计算量的同时大幅提高了对小物体检测能力;PAN用于实例分割,将检测输入图像中的目标。Head输出层由边界框(Bounding box)损失函数和非极大值抑制(NMS)两部分组成,YOLOv5中采用GIoU_Loss为Bounding box的损失函数,通过增加交尺度衡量的方式解决边界框不相交的问题。GloU_Loss公式如下:
(1)
(2)
其中:C为包含预测框A和真实框B的包围框大小;IoU表示预测框的重叠区域。在NMS中采用DIoU_nms替代普通IoU。
目标检测的预测阶段可能出现很多目标框,非极大值抑制作用是对目标框进行最优化筛选,剔除冗余目标框,在YOLOv5中采用加权NMS来进行。
(3)
其中:b和bgt分别表示预测框与真实框的中心点;ρ表示欧氏距离;c是包围预测框与真实框的最小框的对角线长度。
3.2 监测系统
为确保无人看守道口智能机器人能够安全可靠地运行,需设计监测系统对机器人重要设备工作状况进行监测,监测系统可分为机器人箱体数据监测与通信系统、蓄电池状态在线监测系统。
3.2.1 机器人箱体数据监测与通信系统
机器人箱体数据监测与通信系统由基于STM32单片机的数据采集与通信主机板、烟雾传感器、红外传感器、振动传感器、门磁传感器组成,用于获取机器人作业环境数据信息,为设备管理人员提供设备状态信息,防止设备由于恶意破坏或者环境问题引起的设备损坏.其中烟雾传感器用于检测柜外是否有火灾引起的烟雾,温度传感器用于检测柜内温度是否异常,门磁传感器用于检测是否存在非法开启柜门的情况,振动传感器用于检测柜体是否收到巨大的撞击破坏。
3.2.2 蓄电池在线监测系统
蓄电池在线监测系统由蓄电池参数传感器、总电流测量装置、485通信转换装置和通信主板组成,蓄电池传感器采集蓄电池的单体内阻、电压、温度,配备2个RJ11通信接口,可实现级联通信;总电流测量装置负责测量电池组的总电流;485通信转换装置负责协议转换,自带2个RJ11通信接口,支持485接口级联通信,主要用于485通讯与SBUS通讯之间的转化,可将采集的蓄电池电压、温度、内阻、均衡充电状态等参数[7],通过RS485接口方式,把蓄电池状态参数上传到控制主板。
3.3 控制系统
控制系统的主要设备是基于华为海思嵌入式LR-TR1003NA主板,具有支持光纤、秒级响应以及支持语音、视频等交互模式的特性。采用CPU+NPU的结构,算力达到1.2TP,外接两路AI识别摄像机和一路无线网桥;设有4G模块,用于与平台中心信息交互;设有GPS模块,用于道口位置的实时定位;支持SD卡存储,可对智能识别摄像机进行录像。
3.4 风光互补发电系统
由于无人看守道口智能安防机器人安放地地理位置较偏僻,没有供电电源,本课题采用分光互补发电系统对机器人供电。风光互补发电系统主要由风力发电机组、太阳能光伏电池组、控制器、蓄电池组成,结构示意图如图4所示。
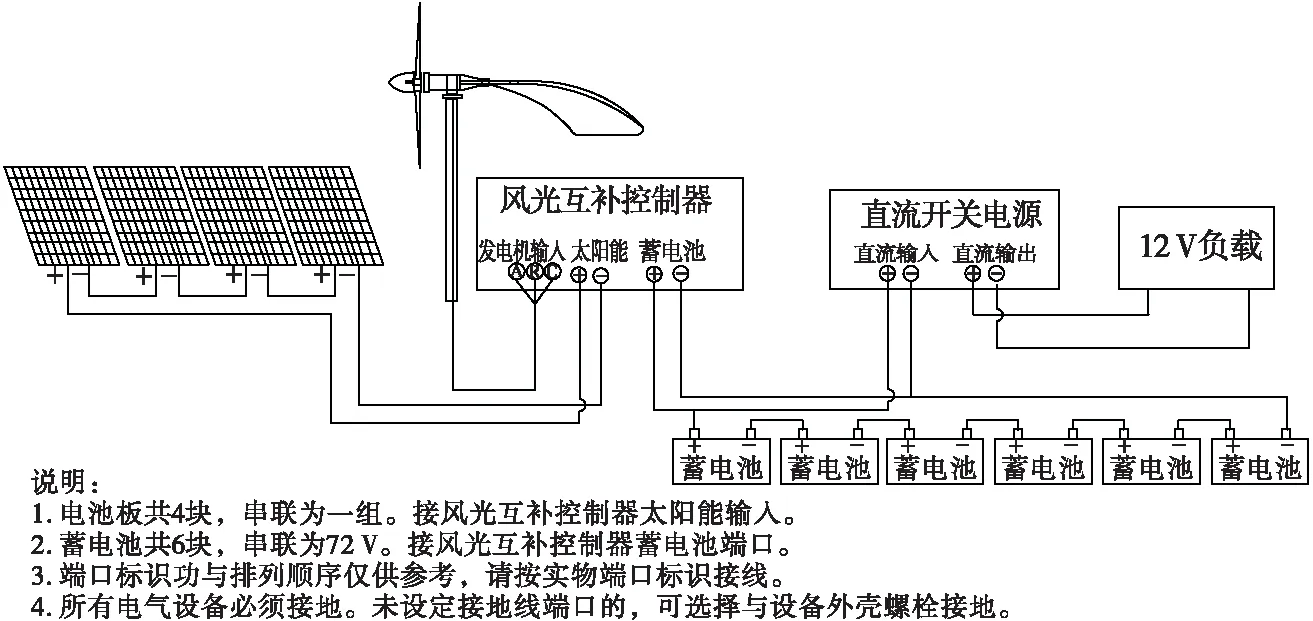
图4 风光互补发电系统
风力发电部分由风力发电机、风机叶片总成和杆塔三部分构成,风机叶片将风能转换为机械能,再通过风力发电机转换为电能,通过风光互补控制器转换为直流72 V,向蓄电池组充电,可直接对负载供电。光伏发电部分由4块额定电压为24 V光伏电池串联组成,将太阳能转换为电能,太阳能转化为电能需要利用半导体的光伏效应实。风光互补控制器在系统中承担着能量调节的作用,可根据外界环境的变化切换蓄电池组的充、放电状态,当发电量不足时,可控制蓄电池向负载供电,以保证机器人工作的稳定性和持续性。蓄电池组由6块12 V的蓄电池组成,存放在地面特制的电池箱内,可接收风光发电传输来的电能并转换为化学能储存,也可在风光发电系统发电量不足时向负载直接供电。
4 监控中心管理平台
监控中心管理平台把通过4G网络采集无人道口智能安放机器人的视频、图片、事件报警等信息,实时用PC终端呈现出来,并提供历史视频、事情等的查询呈现[10]。设备通过4G网络连接服务器的外网IP,通过防火墙和网关,连接到内网服务器,然后进行数据通讯。用户可查询的信息包括无人看守道口智能安防机器人的视频、蓄电池在线监测系统的实时监测结果、箱体多路传感器采集的信息、声光报警器状态及风光互补发电系统工作状态等信息,服务器接入短信模块,可实现短信预警,帮助管理人员及时了解无人道口机器人的工作状况,保证机器人稳定运行。
5 结论
该研究的无人道口智能安防机器人能够在无人看守道口稳定运行,实现了对道口两侧行人和车辆的精确检测,进而实现预警功能,通过数据采集与远程监控技术能够实时监测机器人的工作环境和工作状况,保证机器人持续可靠地运行。给道口过往行人的生命财产和运输车辆提供了有力的安全保障,实现了矿区铁路无人看守道口安全管理的可视化、智能化、网络化,也为下一步矿区铁路运输的信息化、自动化发展奠定坚实的基础。
猜你喜欢
中国铁路(2022年5期)2022-07-20
铁路通信信号工程技术(2022年1期)2022-02-11
汽车观察(2021年11期)2021-04-24
海峡姐妹(2019年12期)2020-01-14
汽车观察(2018年12期)2018-12-26
汽车维修与保养(2017年1期)2017-05-15
快乐作文·低年级(2016年9期)2016-09-30
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
