3D RISS/GPS组合导航在卫星失锁下的定位精度分析
2022-08-15 08:22魏涨汀钱素琴
导航定位学报 2022年4期
魏涨汀,钱素琴
3D RISS/GPS组合导航在卫星失锁下的定位精度分析
魏涨汀1,钱素琴2
(1. 东华大学 信息科学与技术学院,上海 201620;2. 东华大学 数字化纺织服装技术教育部工程研究中心,上海 201620)
针对车辆组合导航在卫星信号失锁条件下定位精度较低的问题,提出了一种输出校正和反馈校正同时进行的三维简化惯性传感器系统(3D RISS)/全球定位系统(GPS)组合导航模型。该模型在卫星信号正常的时候进行3D RISS和GPS的组合导航,由扩展卡尔曼滤波对二者的输出进行融合,并通过输出校正和反馈校正同时进行的方式得到当前的位置、姿态、速度以及传感器误差等信息,在卫星信号失锁后切换至3D RISS自主导航,并补偿之前所估计的传感器误差。实验结果表明,该组合导航模型可以保证车辆在卫星信号正常和失锁阶段都有较高的定位精度。
组合导航;车辆定位;卫星信号失锁;扩展卡尔曼滤波;三维简化惯性传感器系统
0 引言
随着社会的发展,人们对车辆的需求越来越大,因此对于车辆导航的定位精度要求也越来越高。经过几十年的发展,导航技术也从之前的单一导航逐渐发展成组合导航。组合导航可以将各种单一导航的特点进行结合,实现优势互补,其中应用最为广泛的就是全球定位系统(global positioning system,GPS)与惯性导航系统(inertial navigation system,INS)相结合的模式[1]。GPS适用范围广,但比较容易受外界环境因素的影响且输出频率较低,而INS有着不受外界条件限制,自主性强,输出频率高,短时导航效果好等特点,因此,二者结合能大大提高导航的适用范围和精度[2]。
INS/GPS组合导航的数据融合方式,如今已经比较成熟,随着卡尔曼滤波、扩展卡尔曼滤波、粒子滤波、无迹卡尔曼滤波等滤波算法的提出,组合导航输出数据的精度越来越高[3]。然而,组合导航的问题却往往集中在卫星信号失锁阶段,车辆在实际行驶过程中,会出现很多卫星信号不佳的情况,比如地库,城市峡谷,恶劣天气等,这时候传统的滤波器就会失效,惯性导航的误差会随着时间迅速积累而导致系统发散。为了保证车辆组合导航系统在卫星信号失锁条件下仍然能保持一段时间的高精度定位,文献[4-5]将神经网络引入组合导航系统,对系统误差模型进行动态学习,可以在卫星信号失锁后保证一定的导航精度,但由于实际行车路况非常复杂,利用神经网络的方法有时候无法达到精度要求,这时就需要从另一个角度进行分析,通过对惯性导航环节做误差补偿或者寻找新的观测量来提高组合导航的定位精度。陆地车辆可以将轮速当作另一观测量,因此,车辆组合导航往往采用的是INS/GPS/轮速的组合形式[6-10],在卫星信号失锁条件下,采用车载惯性和里程计组合的导航模式,保证短时间内的导航精度。然而,由于惯性器件以及里程计的测量存在误差,失锁阶段的定位精度依旧会受到一定的影响,因此需要对这部分误差进行实时估计和补偿。本文基于三维简化惯性传感器系统(three-dimensional reduced inertial sensor system,3D RISS)这一航位推算(dead reckoning,DR)方法,设计了一种输出校正和反馈校正同时进行的3D RISS/GPS组合导航系统,在引入轮速辅助的同时,估计出传感器误差,可以使车辆组合导航在卫星信号失锁后仍然具有较高的定位精度。
1 3D RISS/GPS组合导航
1.1 3D RISS模型
3D RISS就是利用车辆的里程计、一个单轴陀螺仪和两个加速度计来实现三维导航的一种DR方法,陀螺仪与车辆的垂直轴对齐,俯仰角和横滚角不再通过陀螺仪计算,而是通过前向和侧向的加速度计算得,同时速度也不再通过加速度计来计算,而是直接采用里程计测得的速度[11]。3D RISS模型如图1所示。
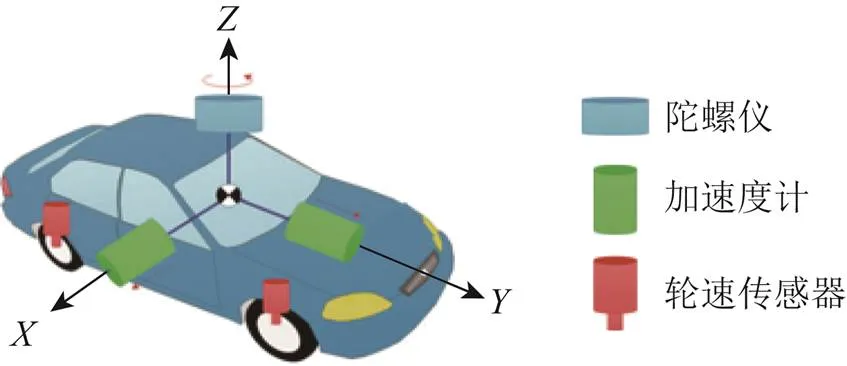
图1 3D RISS模型
与传统的DR[12-13]相比,3D RISS结合了俯仰角以及横滚角,实现了三维导航,可以推算出更准确的航向角。而与INS相比,3D RISS引入了里程计的速度并直接参与计算,避免了加速度计带来的误差,使得位置的推算更加准确。
3D RISS的优点在于,它是通过加速度计来计算俯仰角和横滚角而非陀螺仪,因此可以避免陀螺仪的积分误差所带来的影响。而在速度的计算上,也不再使用加速度计而是直接采用了里程计所测得的速度,从而避免了加速度计的积分误差所带来的影响。所以在3D RISS中,主要的误差就是垂直方向的陀螺仪漂移和里程计测量误差。
1.2 3D RISS航位推算
车辆运动的姿态包括俯仰角、横滚角以及航向角。俯仰角和横滚角可以通过车辆的前向加速度以及侧向加速度与重力加速度的夹角算得,当车辆运动时,前向加速度计测量的是车辆前向加速度以及重力分量。为了计算俯仰角,需要在前向加速度的测量值中减去由里程计算得的车辆加速度,可得俯仰角的计算公式为
计算横滚角时也要对横向加速度进行补偿,可得横滚角的计算公式为

航向角定义为与正北的夹角,沿顺时针方向为正。在航向角更新过程中,需要考虑到地球自转引起的分量以及速度在坐标系转换中引起的分量。航向角的计算公式为

根据车辆姿态和地球模型可以求得车辆当前时刻的位置信息,位置计算公式为


根据车辆的姿态信息可以得到从载体坐标系到东北天坐标系的旋转矩阵为

车辆速度由里程计提供,经过旋转矩阵转化到东北天坐标系之后可得东向、北向和天向的速度分别为


1.3 3D RISS/GPS组合导航数据融合
为了便于实现,GPS与3D RISS二者的组合方式为松耦合,间接法滤波,数据融合上采用的是扩展卡尔曼滤波(extended Kalman filter,EKF)[14]。相比于传统的INS/GPS/轮速的组合导航,3D RISS/GPS组合导航不需要设计2个滤波器在卫星信号正常和失锁之间进行切换,同时3D RISS/GPS组合导航的误差状态量只有9维,简化了计算,降低了对处理器的要求。
3D RISS EKF的误差状态方程可表示为

将误差状态方程线性离散化后可得


为了能够更准确地估计出陀螺仪的动态漂移,将GPS的航向角信息也作为观测量,形成7维观测量为

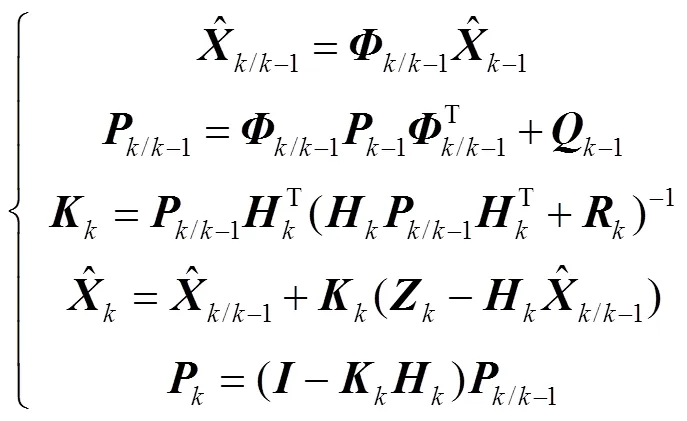
离散卡尔曼滤波方程为
2 传感器误差估计和补偿
在利用误差状态量对组合导航系统进行校正时会用到输出校正和反馈校正2种方式,这2种方式也被称为开环法和闭环法[15]。输出校正和反馈校正的形式如图2所示。

图2 输出校正和反馈校正
所谓输出校正就是利用滤波器估计的导航参数误差值去校正导航输出的参数,从而得到组合系统导航参数的最优估计值。反馈校正则是把滤波器估计出的导航参数误差反馈到惯导系统内对误差状态进行校正,惯导重新解算出更为精确的导航参数。2种校正方式各有优缺点,输出校正的优势在于系统和滤波器是独立工作的,因此输出校正的方式可以得到GPS输出、惯性导航输出以及组合导航输出3种结果,另外输出校正的方式不在误差系统模型内部对参数进行修正,这也就意味着通过输出校正,可以得到系统误差在一段时间内的变化情况,这有利于传感器误差的估计,但是输出校正的缺点在于其系统误差的状态模型是经过一阶线性化的,即使误差是相对较小的量,长时间工作下依旧会导致一定程度的失真,从而使得滤波器的精度下降。反馈校正则相反,在对误差状态进行校正后,系统误差可以始终保持在比较小的量级,实际上在每次滤波后,误差状态量都被置零,因此可以保证滤波器长时间的精度,可是这种做法却不利于传感器误差的估计。
上文提到对于3D RISS模型,主要的误差来源是垂直方向陀螺仪的漂移以及里程计的测量误差,通过卡尔曼滤波器可以实时估计这两项误差。利用反馈校正很容易实现系统在3D RISS/GPS组合导航和3D RISS自主导航之间的切换,便于程序的设计,而利用输出校正则能估计出更准确的传感器误差,为了结合二者的优点,这里利用了2种校正方式同时进行的方法,它们利用相同的导航参数进行卡尔曼滤波,并且独立进行,只在时间上同步,反馈校正后的输出作为组合导航的输出,输出校正只用来估计传感器误差,实现流程如图3所示。
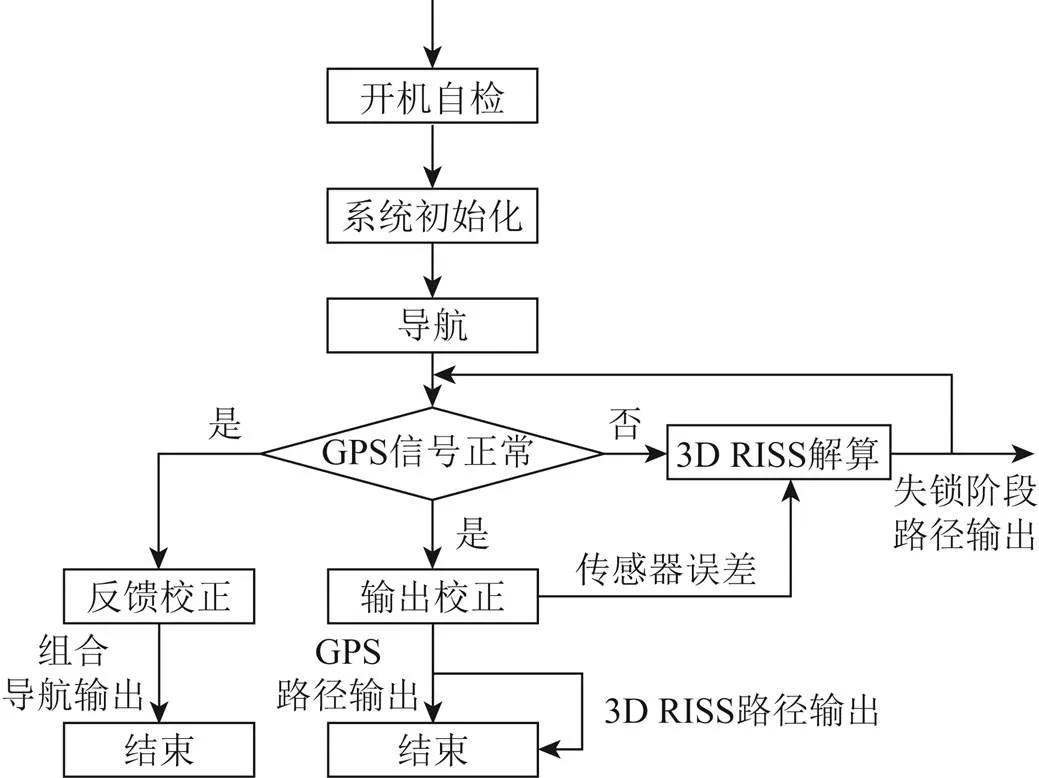
图3 开环和闭环同时进行的3D RISS/GPS组合导航流程
3 实验与结果分析
为了验证方法的有效性,这里分别采集了几组不同路况下卫星信号失锁前后的路测数据进行仿真,其中包括空旷无遮挡道路、隧道、地库以及林荫路等路况。硬件系统包含主控芯片,五轴惯性传感器单元,轮速传感器,卫星接收机模块,GPS双天线等。
图4(a)、图4(b)分别为车辆行驶在空旷无遮挡道路时的路径和局部放大图,图中组合导航定位输出频率为100 Hz,实时差分定位(real-time kinematic, RTK)输出为2 Hz,3D RISS/GPS推算路径与RTK固定解定位路径基本一致,误差在厘米级别。由此可以看出在卫星质量较好的情况下,文中设计的3D RISS/GPS组合导航具有较高的定位精度。
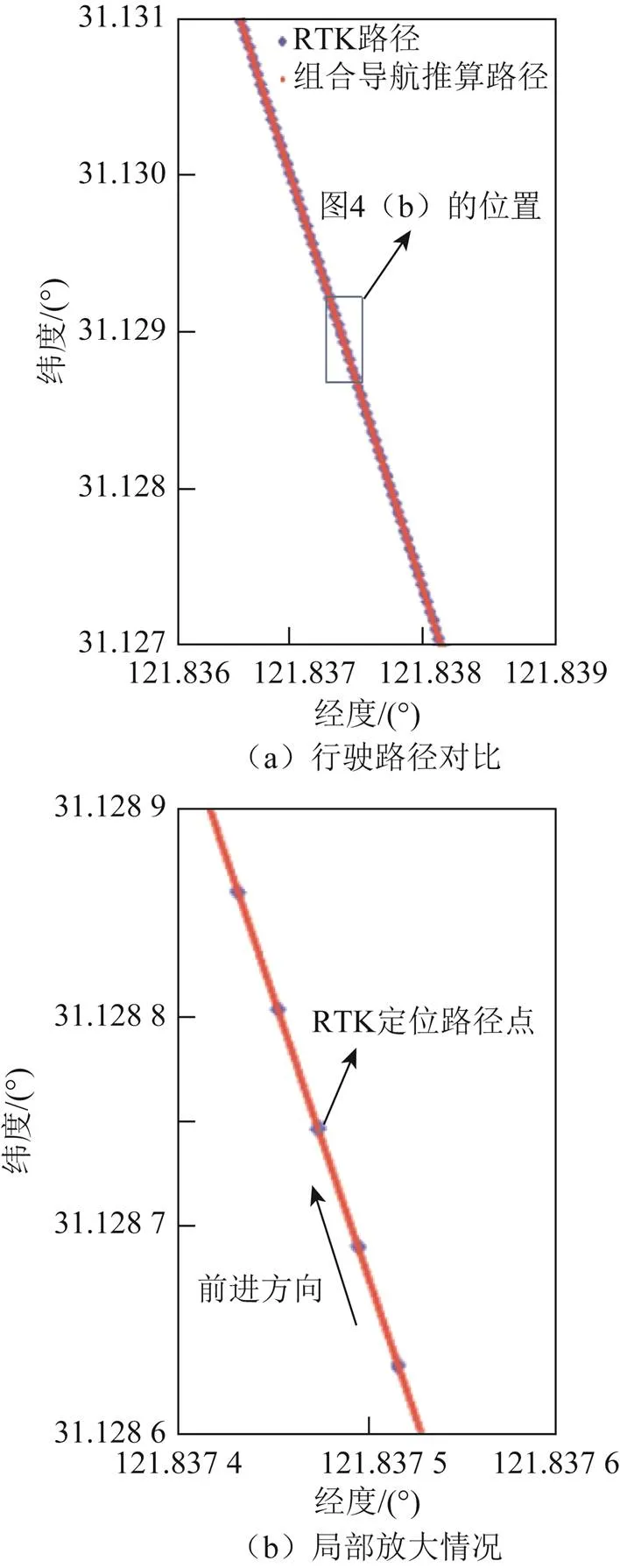
图4 车辆行驶在空旷无遮挡道路上的路径
图5(a)、图5(b)、图5(c)分别为汽车行驶在隧道前后的路径和局部放大情况。图5(b)为有卫星信号时车辆的运动路径,从图5(b)中可以看出,在隧道外有卫星信号的时候系统推算路径与GPS路径基本重合,也再次说明了在卫星信号正常阶段该组合导航系统可以提供非常精确的导航定位。图5(c)为卫星信号失锁阶段即隧道内的路径对比,由于陀螺仪的漂移以及里程计的误差使得系统在3D RISS自主导航环节推算的路径(图中左边路径)与实际路径(图中右边离散点路径为参考路径)产生了偏差,失锁总长约为1768 m,失锁时长在150 s左右,失锁偏移距离为16.2 m,误差率在0.9%左右。但上述路径是并未进行开环误差补偿的3D RISS所推算的,本文所提出的方案中可以利用独立的开环卡尔曼滤波器来估计传感器误差,因此可以在卫星失锁后补偿之前估计出的传感器误差,推算出更为精确的路径(图5(c)中中间靠近右边的路径),补偿后失锁偏移距离由原来的16.2 m缩短到了5 m左右,误差率降低到了0.3%,大大提高了失锁阶段的导航精度。

图5 车辆行驶在隧道前后的路径
图6(a)、图6(b)为车辆在地库内外行驶的情况。测试车辆在进入地库后绕着地库连续跑4圈后出库,地库内卫星信号失锁,图6(b)为车辆在地库内的路径推算图。从图6(b)中可以非常明显地看出,由于陀螺仪的漂移导致了系统推算的路径有较大的偏差,本应该重合的4圈地库变成了梅花链的形状,出库的偏移距离也非常大,但是经过传感器误差的补偿后可以看出地库内车辆的行驶情况已经非常接近真实路径了。
图7为车辆行驶在小区林荫道里的情况。林荫道最大的特点就是卫星信号断断续续,也就是说车辆在行驶过程中会出现很多次卫星失锁的情况,并且每次失锁的时间都很短,大概几秒钟。从图7中可以看出,在整个行驶过程中,系统推算的路径几乎没有偏离,这也说明了3D RISS航位推算在短时间内的导航精度是非常高的。
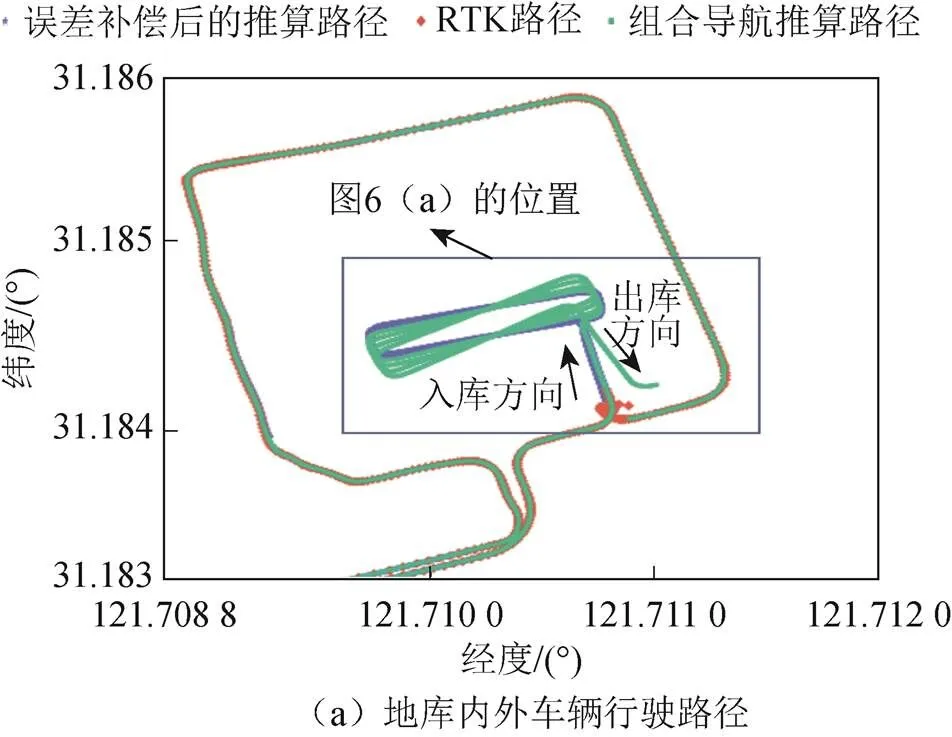

图7 车辆行驶在林荫道上的路径图
车辆在实际行驶过程中,可能会由于一些不确定因素而导致系统在误差估计和导航路径推算上出现问题,为了验证系统的性能,这里对一个地库和2个隧道进行了多次测试,统计结果如表1所示。另外由于在卫星信号正常阶段,组合导航输出的结果基本上没有偏差,所以这里不做统计。表1中的偏移距离为卫星信号恢复后3D RISS推算位置与GPS给出位置的距离,误差率为偏移距离除以失锁行驶距离,从表1中可以看出,本文所采用的组合导航系统在地库和隧道的定位误差率可以基本维持在1%以内,具有较高的精度。
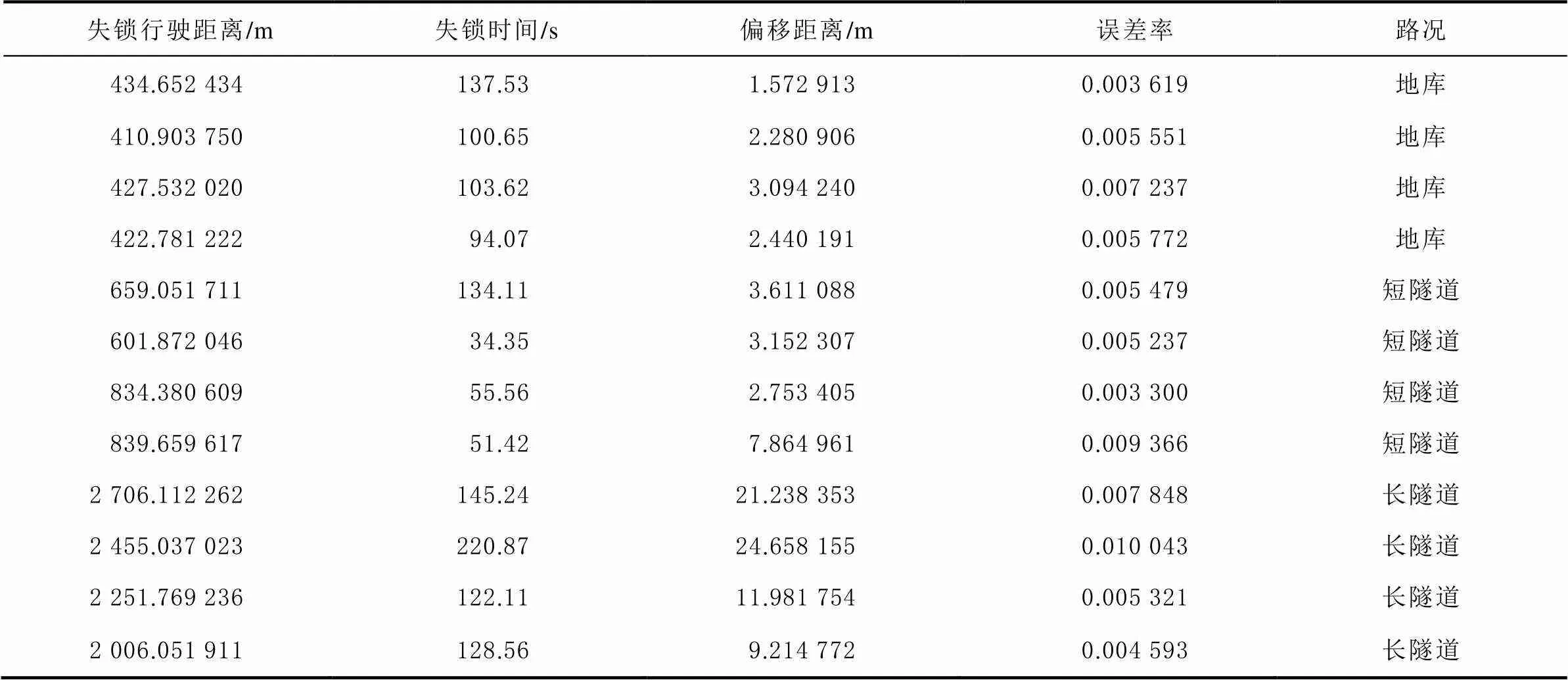
表1 车辆行驶在地库和隧道的定位误差统计
4 结束语
组合导航在卫星信号失锁阶段的定位精度决定了整个系统的导航性能。本文从3D RISS出发,设计了一种低成本,易于实现的组合导航系统,可以根据卫星信号的质量来切换3D RISS/GPS组合导航和3D RISS自主导航这2种模式,经误差补偿后的3D RISS自主导航,可以使车辆在卫星失锁阶段的定位误差率基本维持在1%以内,在城市车辆定位方面有一定的工程应用价值。文中只对主要的误差进行了估计和补偿,当然系统还有一些其他的误差会影响导航定位精度,比如IMU的安装误差,杆臂误差以及GPS双天线的安装误差等,对这些误差进行补偿,可以使得系统在卫星失锁下有更高的定位精度。
[1] 王海生. SINS/GPS组合导航的捷联算法研究[D]. 沈阳: 沈阳理工大学, 2019.
[2] 韩正阳. 卫星导航与惯性导航组合定位技术研究[D]. 石家庄: 河北科技大学, 2020.
[3] 赵雪峰. 卫星信号短暂缺失时的组合导航技术研究与实现[D]. 成都: 电子科技大学, 2017.
[4] NOURELDIN A, EL-SHAFIE A, BAYOUMI M. GPS/INS integration utilizing dynamic neural networks for vehicular navigation[J]. Information Fusion, 2011, 12(1): 48-57
[5] 张新民, 张维. GPS失锁情况下基于神经网络的组合导航算法研究[J]. 弹箭与制导学报, 2017, 37(3): 13-16.
[6] 白亮, 秦永元, 严恭敏, 等. 车载航位推算组合导航算法研究[J]. 计算机测量与控制, 2010, 18(10): 2379-2381, 2384.
[7] 李旦, 秦永元, 张金亮. 车载惯导航位推算组合导航系统误差补偿研究[J]. 计算机测量与控制, 2011, 19(2): 389-391.
[8] 高福隆, 石然, 刘洋, 等. 车载高精度里程计辅助捷联惯性组合导航系统设计与实验[J]. 导航与控制, 2018, 17(6): 42-47.
[9] 刘鹏飞. 里程计辅助的高精度车载GNSS/INS组合导航系统[J]. 光学精密工程, 2020, 28(4): 979-987.
[10] 王可, 刘立刚, 周斌, 等. 基于SINS/GNSS/轮速的列车组合导航算法研究[J]. 系统仿真学报, 2021, 33(1): 189-195.
[11] COSSABOOM M, GEORGY J, KARAMAT T, et al. Augmented Kalman filter and map matching for 3D RISS/GPS integration for land vehicles[EB/OL]. [2021-08-21]. https: //downloads. hindawi. com/archive/2012/576807. pdf.
[12] 张博. GPS/DR车辆组合导航系统设计与研究[D]. 北京: 北京交通大学, 2013.
[13] 沈圆, 倪福生, 魏长赟, 等. 基于粒子滤波方法的GPS/DR组合导航仿真研究[J]. 计算机与数字工程, 2017, 45(8): 1539-1542.
[14] NOURELDIN A, KARAMAT T B, GEORGY J. Two case studies: full IMU/GPS and 3D RISS/GPS integration[EB/OL]. [2021-08-21]. https: //sci-hub. se/10. 1007/978-3-642-30466-8_10.
[15] 尤杰, 高红莲, 曹松银. 基于鲁棒滤波的SINS/GPS松组合导航系统的校正方法[J]. 扬州大学学报(自然科学版), 2020, 23(6): 73-78.
Positioning accuracy analysis of 3D RISS/GPS integrated navigation system under satellite lock-out
WEI Zhangting1, QIAN Suqin2
(1. School of Information Science and Technology, Donghua University, Shanghai 201620, China;2. Engineering Research Center of Digitized Textile & Apparel Technology, Ministry of Education, Donghua University, Shanghai 201620, China)
Aiming at the problem of low positioning accuracy of vehicle integrated navigation under the condition of satellite signal lock-out, the paper propose an integrated navigation model in which output correction and feedback correction are carried out simultaneously. This model combined Three-Dimensional Reduced Inertial Sensor System (3D RISS) and Global Positioning System (GPS) navigation when the satellite signal is normal, and their output is fused by Extended Kalman Filter (EKF), at the same time, the current position, posture, speed and sensor error can be obtained by output correction and feedback correction. When the satellite signal is lost, the system can switch to 3D RISS autonomous navigation and compensate for the previously estimated sensor error. The experimental result showed that this integrated navigation model can guarantee the high positioning accuracy of the vehicle in the phase of normal satellite signal and GPS outage.
integrated navigation; vehicle positioning; navigation signal outage; extended Kalman filter; three-dimensional reduced inertial sensor system
P228
A
2095-4999(2022)04-0049-07
魏涨汀,钱素琴. 3D RISS/GPS组合导航在卫星失锁下的定位精度分析[J].导航定位学报,2022,10(4): 49-55.(WEI Zhangting, QIAN Suqin. Positioning accuracy analysis of 3D RISS/GPS integrated navigation system under satellite lock-out[J].Journal of Navigation and Positioning, 2022, 10(4): 49-55.)DOI:10.16547/j.cnki.10-1096.20220407.
2021-09-27
魏涨汀(1997—),男,浙江绍兴人,硕士研究生,研究方向为嵌入式系统和组合导航。
钱素琴(1971—),女,上海人,硕士,副教授,研究方向为嵌入式系统和人工智能。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
物联网技术(2022年7期)2022-07-21
农业与技术(2022年12期)2022-07-04
人民长江(2021年9期)2021-10-18
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
大众摄影(2018年6期)2018-06-19