海战场无人作战体系协同运用与指挥控制设想
2022-08-19 02:01岳丽军赵朝先
指挥控制与仿真 2022年4期
岳丽军,王 凡,赵朝先
(1. 中国人民解放军91977部队,北京 102249; 2. 江苏自动化研究所,江苏 连云港 222061)
未来海上作战是一种联合、立体、分布、全方位机动的军事行动,是以海洋为机动空间,由海上发起,向海上、岸岛实施兵力、火力投送的作战样式,是一种高风险、巨复杂的战役、战术行动。为了确保作战成功,必须在作战区域内,拥有对敌空、海和岸滩作战力量的决定性优势。近年来,无人机(UAV)、无人艇(USV)、无人潜航器(UUV)、无人战车(UCV)等无人作战平台(UCP)作为一种颠覆性的新型作战力量,引发了战争形态与作战方式的变革,也为海战场作战过程中的侦察、监视、打击、破障、通信等提供了新质作战能力,无人作战平台已逐步成为海战场作战体系中的重要环节。未来海战场无人作战体系是综合利用各型同构、异构无人作战平台,形成“互联共享、分布自主、智能协同”的海上作战体系,从而提升海战场整体作战效能。为了发挥无人作战体系的协同作战能力,有必要研究无人作战体系在海战场中的协同应用及其指挥控制问题,落实无人作战体系在海战场中的协同应用实施,促进海上作战形态逐渐由“有人化、信息化”向“信息化、无人化、智能化”过渡,综合发挥无人作战平台使用灵活,综合作战效益高,适用于危险环境,人员伤亡率低,全寿命费用低等显著优势,提升海战场作战体系的整体作战效能。
1 无人作战平台的能力
近年来,无人作战平台的作战性能和杀伤力越来越大,可以用无人作战平台替代人来完成多种作战任务,无人作战平台在现代战争中的应用优势明显,具有反侦察能力强,工作持续时间长,不担心人员伤亡,可操作性强,侦察能力强等特点,已经被越来越多地应用于执行多种危险和复杂的任务,也为海上作战过程的情报、侦察、监视、打击、通信等方面提供了新质作战力量。
1.1 无人机及其集群作战能力
UAV可以根据不同载荷,具有侦、扰、导、攻、通的能力,其能够前出,对关键海域及航线进行长时间侦察与监控;能对敌岸滩岛屿区域进行抵近侦察,先敌发现目标;能够进行电子干扰与战术诱骗;能够对远程火力引导攻击,当对海域或岛屿抵近侦察发现目标后,为舰艇火炮或导弹选定攻击目标,测定目标参数,引导远程火力进行超视距打击引导,提升火力远程打击范围和效果;能够携带不同类型弹药对敌方陆、海、空作战域实施全方位多域攻击;能够作为通信中继,补盲和延长通信距离,扩大作战半径;能够开展协同作战,与有人机进行战术协同。
1.2 无人艇及其集群作战能力
USV依靠遥控或自主方式在水面航行,主要用于执行危险或者不适用于有人船只执行的任务。USV利用其自主性强,隐蔽性高,载荷大,续航长,避免人员伤亡等优势,可显著提升海上作战能力。根据载荷不同,USV可遂行侦察探测、警戒巡逻、反水雷、反潜、火力打击、目标指示、通信中继等任务;能够抵近重要海域与航线进行目标搜索,对特定海域进行巡逻,对可疑目标进行跟踪;能够在重点海区遂行探雷、扫雷、破障行动,也能在指定海区进行搜潜、攻潜;能够对目标进行火力打击或指示其他火力进行打击;可作为通信的桥接,扩展通信范围,也可以作为海上无人集群的中心控制节点,对集群进行任务控制。
1.3 无人潜航器及其集群作战能力
UUV可以单机独立或集群组网方式进行协同作战,根据任务分工及装备载荷不同,UUV能够在小范围海域执行情报侦察任务,获取作战区域水下环境信息,可以集群方式进行协同感知,完成对水下目标的检测、定位和水文、地理信息的感知;能够以集群的方式,在一定深度的作战海域进行探雷、识雷、灭雷;能够长时间、大范围地警戒巡航,发现可疑目标进行预警;能够探测、跟踪敌舰艇、潜艇,并进行火力打击,也可以配合水面舰艇或潜艇,对敌水面舰艇、潜艇实施伏击,或直接引导舰艇攻击目标。
1.4 无人战车作战能力
UCV可用于海战场两栖作战的突击上陆及陆上行动阶段,遂行侦察监视、警戒巡逻、电磁对抗、地面通信中继、定位引导、高危作业、阵地冲锋、物资运输等任务。侦察巡逻型UCV对战术目标和周围危险环境进行观测,武装型UCV可在滩涂等环境突破敌方火力封锁区,运输型UCV可后勤补给运送伤员,中继型UCV支撑复杂环境通信,破障型UCV配置不同载荷,可以对水际滩头的阻绝墙、混合雷场进行扫雷破障。
2 无人作战体系协同运用设想
本文以海战场两栖作战为背景,研究无人作战体系协同运用问题。两栖作战面临水文不明、气象多变、礁多流急、海道狭窄等不利因素;登陆兵力展开受限,上陆过程中面临守方严密的水雷及火力防御体系,伤亡和战损较大;情报保障要求高,守方严密的防御体系使得攻方侦察兵力抵近侦察十分困难;扫雷破障难度大,守方在水际滩头构筑了雷场、火力、阻物相结合的障碍配系,迟滞了登陆通道的开辟速度;需要持续火力支援,保障突击上陆兵力安全。本文重点研究海战场两栖作战的情报侦察、扫雷保障、火力打击等典型任务的无人平台运用。这些无人平台主要有侦察型、打击型、侦打型UAV,警戒型、反水雷型、反潜型、打击型和侦打型USV,侦察型、反水雷型、攻击型和侦打型UUV,侦察型、打击型、破障型两栖UCV等。各无人平台既可以单独遂行任务,也可组网形成集群,为作战提供“分布、智能、安全”的情报侦察、扫雷破障、火力支援能力。
2.1 无人作战体系协同情报侦察
海战场两栖作战态势瞬息万变,须及时发现敌作战兵力兵器,从而减少伤亡。当抵近敌方防御体系进行战场侦察与作战,必然遭遇敌防御火力强劲攻击,安全受到威胁。可利用UAV、USV、UUV成本较低、损耗代价小、部署灵活等特点,在加强续航与载荷的情况下,抵近敌高风险区域,在空中、水面、水下、水际滩头相互配合,进行有人、无人相互协同探测,构建海战场多维立体预警侦察体系,利用无人作战平台集群之间的自主协同能力,开展抵近侦察,扩大探测范围,增加传感器数量,提升侦察体系的可靠性与容灾能力,获取大纵深、全方位、全时段的海战场态势信息。无人作战体系在海战场作战中的情报侦察作战概念如图1所示。

图1 无人作战体系协同情报侦察作战概念图
在海上,指挥舰指挥舰载直升机、水面舰艇、UAV、USV、UUV前出进行协同探测,获取空中、海上、水下情报的图像、数据、电磁等信息,回传给指挥舰统一态势处理;有人直升机指挥或配合UAV及其集群,开展有人、无人协同方式的信息探测,直升机负责指令下达,UAV集群根据任务分配,对海战场的空、海、水际滩头的敌方目标、兵力部署、行动意图进行侦察,并将获取的信息回传给有人直升机进行初步处理后,回馈给指挥舰进行综合处理与分发共享;水面舰艇可以指挥或配合USV、UUV及其集群,协同探测水面、水下情报,将侦察获取的敌方动目标信息经过水面舰艇初步处理后,送指挥舰统一融合。在岸滩上,登陆部队可利用陆上UAV、侦察UCV及其集群在敌方火力威胁较大的区域,以自主方式协同有人两栖侦察车遂行陆上目标侦察任务,获取敌方火力部署、时敏重要目标等信息,并将获得的图像、数据发送给指挥车,由指挥车统一处理,两栖侦察车也可直接指挥控制无人侦察车及其集群,规划其侦察任务,将获取的无人侦察车探测信息进行预处理。各USV、UAV、UUV集群内部可以有中心或无中心的方式进行分工协作、信息处理与共享。
2.2 无人作战体系协同扫雷
在由海到岸机动作战时,可利用扫雷舰艇、扫雷型USV、UUV进行扫雷,对水际、滩头进行水雷及障碍排除,一般由海上负责扫雷的指挥舰控制扫雷USV、UUV进行扫雷行动,指挥舰艇收集无人系统上报的探测信息,进行综合识别与综合决策,向无人作战平台下达具体的扫雷指令,也可由USV群、UUV群进行集群智能化自主扫雷活动。由于USV具备较大载荷及完备的信息处理设备,以及较长的续航能力,可以USV为中心自主组织USV群及UUV群进行水雷的探测、识别、灭雷。当无人集群之间协同反水雷时,水雷的探测、分类、识别、灭雷可以根据无人作战平台功能区别,既可以由各USV、UUV单独完成,也可以由有人扫雷舰艇、USV群、UUV群进行任务区分,指定有中心或无中心的协同模式完成。此外,根据需要,UUV可以与扫雷舰艇进行配合,引导扫雷舰艇进行排雷。濒海水际滩头破障主要指挥无人破障车及其集群,对滩头阻绝墙、雷场进行扫残破障。无人破障车之间组成集群协同模式,进行任务分配,按照自主方式进行作业,作战概念如图2所示。

图2 无人作战体系协同扫雷作战概念图
2.3 无人作战体系协同火力支援
火力支援作战活动贯穿两栖作战的全过程,分布部署的多平台火力单元形成弹性可变的火力打击网,相互协同形成高、中、低,远、中、近的火力配系,按照火力的时空计划,利用舰炮火力、舰载直升机火力、舰载UAV、USV火力相互协同对敌方海上、岸上目标进行打击压制,掩护海上舰艇或对陆攻击兵力进行作战,同时接收火力召唤与陆上目标指示,组织待机火力进行火力投送;在陆上作战过程中,海上接收陆上的火力召唤及目标指示,协助陆上火力进行目标摧毁,作战概念如图3所示。

图3 无人作战体系协同火力打击作战概念图
在海上由指挥舰艇指挥舰载直升机、打击型UAV,组织有人、无人协同的空中打击群或UAV无人打击群,也可组织由火力支援舰艇与打击型USV构建的有人、无人协同的水面打击群或USV无人打击群。利用无人机抵近目标附近区域进行探测、打击,引导有人机在远距离安全区域发射火力,进行远程渗透打击。无人机集群前出目标侦察,诱使敌方暴露其防御火力,有人机利用导弹及反辐射导弹对目标进行空中火力压制。充分利用USV平台前出距离远,不易被发现等特点,结合有人平台从不同方位进行分布式打击,USV也可向火力支援舰艇提供目标指示信息,引导舰艇火力进行射击。登陆兵力上岸后,可利用配置的UAV和UCV,协助两栖突击车采用有人无人协同方式、无人车/无人机集群自主协同方式对敌火力攻击,UCV和UAV可为两栖突击车提供目标信息,引导两栖突击车火力打击。陆上指挥车可以根据UCV、UAV上报的目标信息向海上舰艇或飞机进行火力召唤,请求火力支援。
3 无人作战体系的指挥控制设想
3.1 指挥控制系统组成
无人作战体系指挥控制系统,主要辅助各层级指挥人员对同构、异构无人作战平台进行集成、协调与控制,以完成侦察、监视、打击等战术任务。设想的指控系统组成主要包括无人平台战术指控系统以及无人平台的任务载荷控制系统,如图4所示。
无人平台战术指控系统,主要负责对海上、岸滩同构、异构UCP无人集群的综合指挥控制。UCP控制站系统,主要负责对单个或多个UCP的运动轨迹规划及任务载荷执行控制,并接收UCP下传的各类信息。集群自主任务系统,主要负责UCP实现自主决策、集群协同控制,含自主任务规划、态势处理、智能协同决策等功能。UCP载荷控制系统,主要负责无人平台的任务载荷的工作控制及运动姿态状态控制。

图4 海战场作战中的无人体系指挥控制装备组成设想
3.2 无人作战体系的指挥控制结构
海战场无人作战平台的作战样式主要有单平台作战、集群作战、有人/无人协同作战三种样式,其指挥控制模式主要包括人在环内、自主作战、混合控制三种模式,如图5、图6、图7所示。
人在环内模式下,无人作战平台全时接收控制站的指令,按照指令进行单机作战、与其他无人平台形成集群作战、和有人作战平台可进行协同作战,这种指控模式相对简单。
自主作战模式下,战术指挥机构可直接对无人平台下达任务指令,无人作战平台接收任务后,控制其载荷进行战场感知、轨迹规划、障碍避碰,完成各项任务。当集群作战时,无人作战平台自主任务分配,协同组网分工完成探测、识别与打击等行动。

图5 无人作战体系人在环内的指控模式
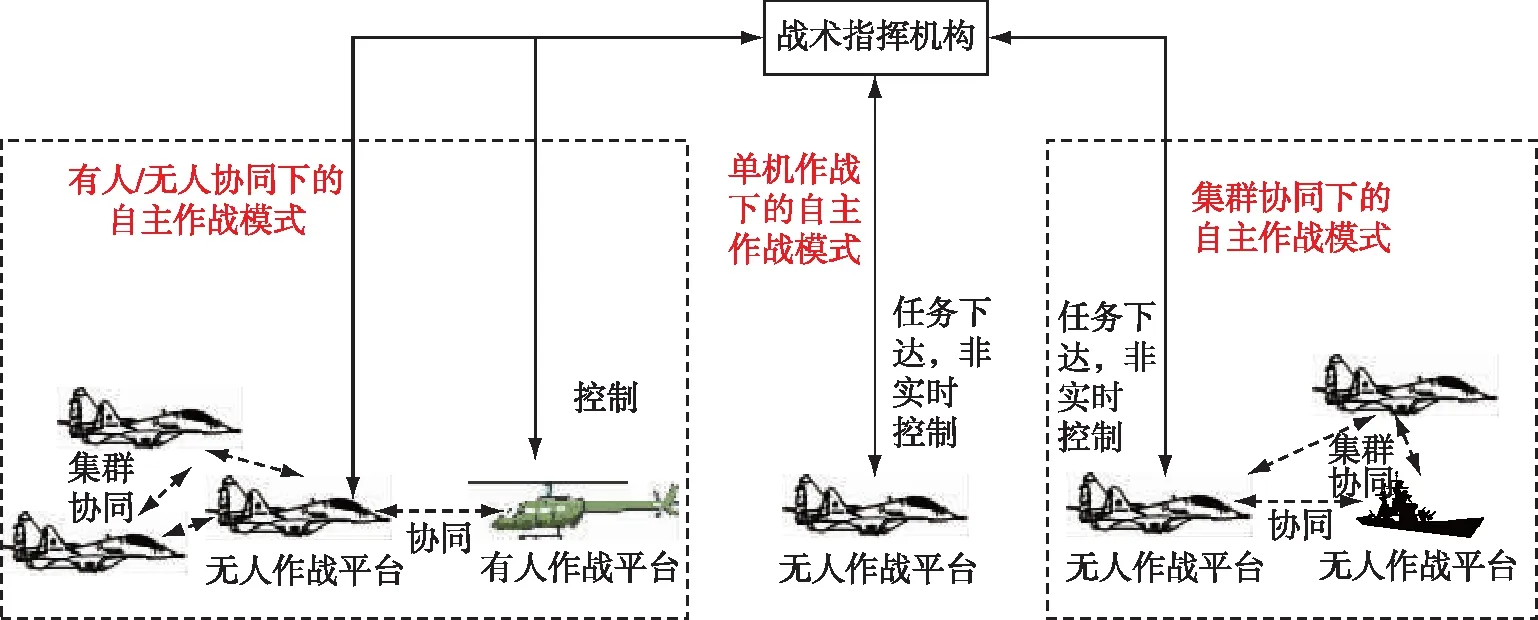
图6 无人作战体系自主作战指控模式

图7 无人作战体系混合控制模式
在混合控制模式下,战术指挥机构根据任务复杂情况,可向无人作战平台控制站或无人作战平台下达任务。既可由无人平台控制站实时控制无人平台及集群进行任务行动,也可以由无人作战平台及集群自主规划并完成任务。
综上所述,海战场无人作战体系指挥控制各级指挥系统之间的指挥控制结构如图8所示。
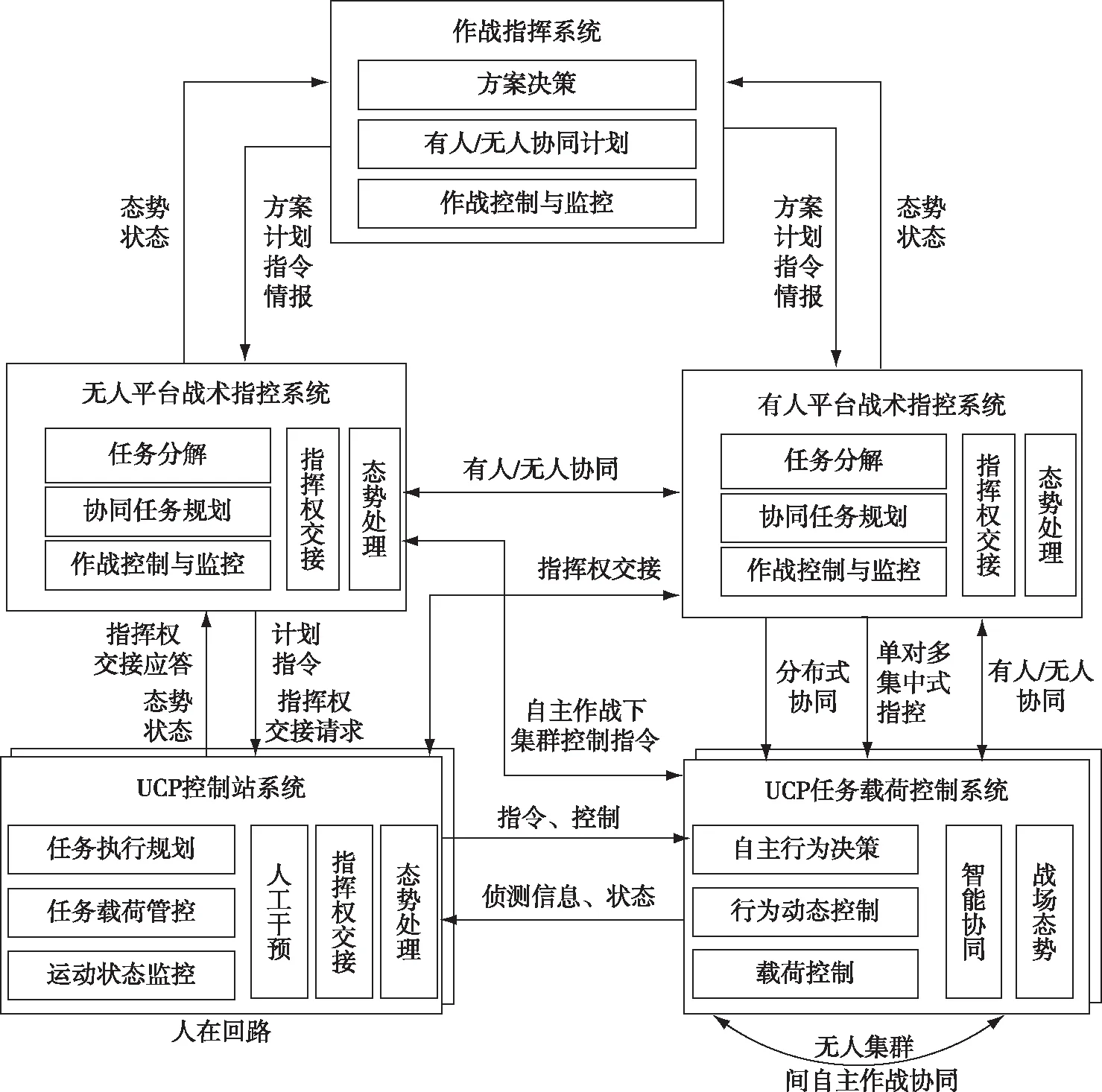
图8 无人作战体系指挥控制结构设想
作战指挥系统进行方案决策、制定有人/无人平台的任务计划,向无人平台战术指控系统及有人平台战术指控系统下达计划、命令,指挥有人、无人两类装备的协同作战。
无人平台战术指控系统进行同类、异构等无人平台的综合作战指挥,各类无人平台由控制站完全控制其执行运动轨迹与相关任务,无人平台战术指控系统指挥多个同类、异构UCP控制站系统,UCP控制站系统同时控制多个同类UCP作战,该指挥结构下,UCP既可以单独作战,也可以在无人平台战术指控系统及UCP控制站系统协同指挥下,与其他UCP相互协同,完成有人控制的无人集群作战。
无人平台战术指控系统可向UCP下达任务,直接指挥单UCP及多UCP集群进行自主作战。单UCP自主作战时,接收任务分配,自主感知战场态势,根据分配的探测或打击任务实时规划运动轨迹,自主执行任务。多UCP集群自主作战时,无人平台战术指控系统规划同类、异构UCP集群的作战任务,进行任务分配,无人UCP集群接收任务,进行任务分解,完成任务,无人平台战术指控系统接收UCP集群通报的探测信息或打击情况信息,重要情况下可以适时干预行动。
在作战指挥系统的统一指挥下,无人平台战术指控系统与有人平台战术指控系统之间进行协同互操作,实现有人/无人作战平台的协同作战指挥,将有人作战平台的指挥与战术决策优势,与UCP无人平台的自主决策、灵活部署、成本较低、环境适应性强、极大保护人员安全等优势相结合,提高整体作战能力。有人/无人作战平台的协同作战指挥采用集散式的指挥控制结构,主要有两种形式:一种是无人平台战术指控系统与有人平台战术指控系统进行协同,后者请求前者进行任务协同,无人平台战术指控系统将任务分解下发到各UCP,集中指挥各UCP配合有人作战平台完成作战;另一种就是有人作战平台战术指控系统直接进行UCP的指挥权交接,直接指挥UCP及其集群进行协同作战,既可采用集中指挥方式,也可用分布式协同方式进行无人集群的指挥,完成有人、无人协同作战。
3.3 指挥控制关键技术设想
无人作战体系应用于海上作战中,既要发挥无人作战平台的性能及效费比优势,又要发挥有人作战平台人员的情报判断、决策规划、综合控制能力,其指挥控制所涉及的重要关键技术如下。
1)无人作战体系的指挥控制体系结构技术
无人作战体系中同类、异构UCP,具有人在环内、自主作战、有人无人协同的多种作战模式,需要建立适合海战场作战过程中,不同阶段下的UCP开放式指挥控制结构,能够支撑有人平台为主、UCP为辅以及有人/无人平台对等协同的多种使用模式,确定其指挥关系、控制流程、人机协作交互等级、UCP自主协同等级、UCP间互操作标准、有人/无人协同层次与模式,确保指挥控制体系结构的鲁棒性、敏捷性、开放性。
2)有人/无人系统任务协作技术
确定海上作战协同探测、协同打击的同类、异构作战平台之间互操作等级与协同模式,参考美军《无人系统综合路线图 2017—2042》,规定若干等级的UCP互联互通标准,利用通用化协议,采用开放式、通用化、弹性化的任务架构,为无人平台提供按需、动态、灵活的集群集成能力,实现有人、无人平台之间的指令联通及信息共享,确定主从式、协作式、混合式协同模式。主从模式下,有人平台直接管控无人平台执行抵近侦察、诱骗敌方防御火力、火力打击与评估任务;协作模式下,有人、无人集群自主决策、协同侦察和打击,按照同步协同控制算法,分布式协同完成作战任务;混合式协同同时具备主从式与协作式的特点,例如有人平台对无人平台集群是主从式协同,而无人平台集群内部则是协作式协同,确保人在环内中的主导权。
3)无人集群任务规划与智能化决策控制技术
无人集群的任务规划主要包括路径、时序、策略、载荷规划,在海上作战中,作战指挥系统及无人平台战术指控系统主要关注无人集群的协同情报侦察、分布火力打击、协同突防等任务的行动路径及协同策略规划。协同情报侦察的规划,综合利用UCP的探测资源,计算在有限时间、有限航程内实现对作战海域区域目标的最优探测,优化探测队形和方位, 实现无人系统探测行为的同步化、多维化;协同火力打击规划,综合利用UCP的火力载荷、攻击位置和待攻击目标特性等, 实现在最短时间内完成对目标的最佳攻击。
4)空海陆无人作战体系协同指挥引导技术
两栖作战中的USV、UUV、UAV与地面UCV等无人作战平台,虽具备一定的自主作战能力,能够自行规划运动轨迹及任务策略,但当无人作战体系融入两栖作战过程时,必须接受战术指控系统的指挥控制,战术指控系统根据战场态势进行无人作战任务规划,无论是人在环内的作战模式还是集群自主作战模式,战术指控系统都须制定指挥引导预案,引导和控制无人平台进入任务执行区域,既要确保行动路径的安全性,又要保证无人平台之间任务协同的战术、战法的效率最大化。对于自主作战模式,无人作战平台被引导进入作战区域后,才开始按照预案及实时态势,进行自主路径规划,执行任务,同时与同类或异构的集群内部无人平台保持一定等级的互操作能力。可利用强化学习智能决策算法以及群体智能深度学习算法,结合战术战法知识库,建立动态自适应的指挥引导模型,进行多无人平台指挥引导计算及冲突检测和避碰控制,提高指挥引导容量与准确度。
4 结束语
本文设想将无人作战体系的能力优势应用到海战场作战中,在减少人员伤亡的同时,提升海战场作战整体作战能力。同时,探究了无人作战体系指挥控制结构,希望为海战场作战无人化技术发展作出贡献。从公开的文献看来,国际上对于无人作战体系的技术及项目验证的研究不多,海战场作战中的无人作战体系应用与指挥控制技术还需要进一步研究。
猜你喜欢
意林(2020年20期)2020-11-06
体育风尚(2020年3期)2020-09-10
青年生活(2019年7期)2019-09-10
汽车杂志(2018年6期)2018-06-25
军事文摘(2017年4期)2017-04-19
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
宠物世界·猫迷(2016年3期)2016-04-23
轻兵器(2015年21期)2015-09-10
环球时报(2010-01-05)2010-01-05
学与玩(2009年10期)2009-11-02