
新型指南车设计及样车功能实测1)
2022-08-19 11:37董焱章陈广飞刘启鑫陆海斌
力学与实践 2022年4期
董焱章 陈广飞 刘启鑫 陆海斌 李 莹 ,†
*(湖北汽车工业学院汽车工程学院,湖北十堰 442002)
†(汽车动力传动与电子控制湖北省重点实验室,湖北十堰 442002)
指南车又名司南车,是中国古代在机械设计方面的杰出成就之一。不同于依靠地磁效应的指南针,指南车是由两侧车轮、传动装置、转向装置、车架和指向标等五大构件所组成的双轮无动力车辆,其功能是为了自动定向且具备负反馈。中国古代,人们依靠指南车实现在荒野和沙漠中行走时辨别方向,从晋代开始,指南车被用于“记里鼓车”和天子仪仗队。除了机械发展史外,指南车的发明在控制论发展史同样占有重要地位,被李约瑟称为“所有控制论机器的祖先”[1-2]。
由于年代久远,古代指南车并无实物流传下来,为了复原这个典型的自动控制机械,近现代国内外研究者对其进行了尝试。机械指南车复原主要分为两大类,一类是以中国国家博物馆现存的宋代燕肃指南车模型为代表的定轴式指南车:1937年中国学者王振铎仔细考证了《宋史》等古籍,并实施了英国人摩尔(Moule AC)的想法,成功复原定轴式指南车;另一类是大英博物馆陈列的差动式指南车:1947年英国学者Lanchester G在其《黄帝的指南车》演说中提出差动轮系机构原理,进而成功复原差动式指南车[3]。
进入21世纪后,仿真工具和3D打印等现代机械设计理论的进步推动了机械指南车的发展。李绍青[4]利用三维软件对指南车进行了完整设计,并建立了指南车的虚拟样机模型,该虚拟样机模型非常便于教学演示。刘钊等[5]通过3D打印技术成功复原了一种结构简单的指南车,该款指南车结合了现代电机和单片机技术,提高了指南车的可操作性和准确度。邓崇林[6]在以指南车内部运作机理为黑箱的基础上,借助微分几何提出了指南车的广义运动方程。此外,研究者也对机械指南车内部齿轮等传动机构进行了结构优化设计。陈威等[7]针对差动轮系设计了一款仅需7个锥齿轮的简易款指南车定向机构,并对其进行了模型仿制。高云峰[8]设计了一种简单有效的差动齿轮机构,并通过亚克力板复原了实体指南车。聂建军等[9]在行星齿轮传动机构设计中构建了一种定轴轮系齿轮和蜗轮蜗杆机构组成的混合传动方案,结构紧凑且传动效率高。范工兴等[10]借助虚拟仿真软件ADAMS对牙嵌式离合器的结合过程进行了仿真,获得了影响主、从动件结合的主要参数及规律。
综上所述,定轴式指南车和差动式指南车的相关研究几乎沿着两条平行的方向发展,鲜有交叉。本文将在分析定轴式指南车和差动式指南车传动结构特征的基础上,融合定轴式指南车的直线越障优势和差动式指南车的平面任意直行和转弯优势,将差动式指南车的直行越障问题作为设计目标,提出一种新型指南车的机械设计方案,继而进行三维实体建模和运动机构仿真,最终完成样车的制备及其功能实测。
1 新型指南车设计方案
指南车本质上就是一种定向车,无论在直行工况亦或是转弯工况,指南车上的木仙人均应指向一个固定方向,故指南车的基本运动条件如下。
以地面为参考系,当指南车的车架相对于地面偏转一定的角度η,指南车的木仙人应相对车架偏转一定的角度ψs,且两个角度应满足关系η = –ψs,理论上该条件在任何情况下均应得到满足,从而保证木仙人相对于地面参考系的转角φ始终为零[11]

针对此,定轴式指南车采用了定轴轮系,如图1(左)所示,只有1个自由度,当指南车在平面直行和平面定点转弯的工况下,可以满足指南车的基本运动条件式(1);尽管如此,由于定轴式指南车采用了离合机构,指南车直行时两车轮与木仙人之间的传动是断开状态,因此定轴式指南车在越障等曲面直行工况时也能完成指南功能。与此相对比,差动式指南车采用了差动轮系,如图1(右)所示,有2个自由度,其机构特点是当指南车的两车轮在平面内存在不同的转速和转向时,行星轮7可以解决两车轮的转速差和转向问题[12],因此差动式指南车在平面直行和平面任意转弯的工况下,均能满足指南车的基本运动条件式(1),但是差动式指南车在越障等曲面直行工况时,由于两车轮均为原动件,则两车轮产生的转角差将会导致木仙人发生错误的偏转,故差动式指南车在直行越障时不能完成指南功能。

图1 定轴式指南车(左)和差动式指南车(右)示意图Fig.1 Schematic diagrams of fixed-axle south-pointing chariot (left) and differential-type south-pointing chariot (right)
在常规的平面直行和任意转弯等平面运动工况下,差动式指南车具有显著的优势,但若遇到突发的越障等曲面直行工况时,定轴式指南车的优势更明显。因此本文的目标就是如何设计出一种同时满足平面直行、平面任意转弯和直行越障等多工况的新型指南车。
1.1 总体设计方案
前述设计目标可以归结为如何解决差动式指南车的直行越障问题,鉴于定轴式指南车直行越障的机构特征,即通过恰当的离合机构在直行工况下断开木仙人与两车轮之间的传动关系,在转弯工况下重新恢复其传动关系,故分别基于传统的定轴式离合机构和现代的牙嵌式离合器提出两种不同的总体设计方案。
方案一:以差动式指南车的差动轮系为蓝本,采用定轴式指南车的类似离合机构,直行工况下断开差动式指南车两车轮与木仙人之间的齿轮传动,转弯工况下再恢复其齿轮传动。该方案通过车辕控制内部齿轮的位置移动,进而控制齿轮传动的分离与接合,理论上是可行的。但由于差动式指南车的齿轮结构较定轴式指南车更为复杂,多添加一个齿轮控制机构会导致整体设计方案极为复杂,相应的设计和加工成本也将增加很多。更困难的是,齿轮控制机构从分离状态转化为接合状态时,齿轮接合瞬间未必啮合良好,可能会发生错齿现象,进而导致指南车无法完成指南功能。另外,从提高指南车定向机构的精度考虑,齿轮副数目也需要尽可能减少[12]。
方案二:以差动式指南车的差动轮系为蓝本,采用牙嵌式离合器控制木仙人与中心立柱的分离与接合,直行工况下木仙人与中心立柱之间的连接断开,转弯工况下再恢复木仙人与中心立柱的连接关系。与方案一相比较,该方案无需对差动式指南车的齿轮传动结构进行大幅改动,因此其设计和加工成本可以得到很好地控制。同时,差动式指南车传动机构的上方相对简洁,留有比较充足的设计空间,通过引入一个大齿数的牙嵌式离合器,可以有效地改善传动关系接合时的错齿现象。
两个设计方案在理论上均可实现同时满足平面直行、平面任意转弯和直行越障等多工况的指南功能,尽管如此,方案二相比方案一,在经济性和可靠性等方面优势更为明显,因此本文选择方案二来完成新型指南车的总体设计。
1.2 基本运动关系分析
新型指南车的差动部分结构示意如图1(右)所示,左、右车轮分别与齿轮1和齿轮3同轴固连,齿轮2与齿轮6同轴固连,齿轮4与齿轮5同轴固连,考虑到结构设计的可靠性和便利性,这里锁定齿轮1和齿轮2的齿数比等于齿轮3和齿轮4的齿数比,同时保持齿轮5与齿轮6齿数一致,即存在角速度关系式
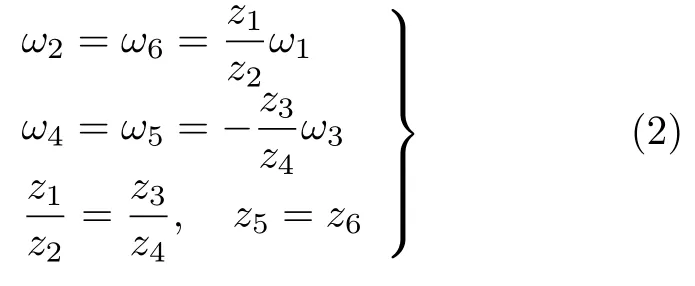
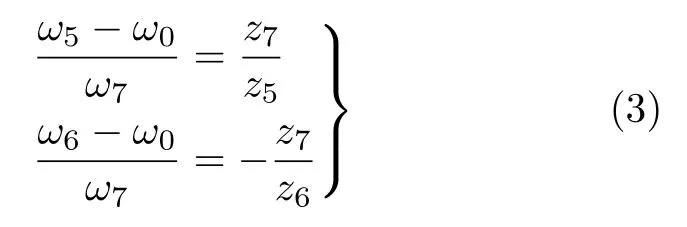
以中心立柱为参照(中心立柱角速度ω0),齿轮5,齿轮6与行星齿轮7组成差动轮系机构,即存在关系式
通过式(2)和式(3)联合可推知

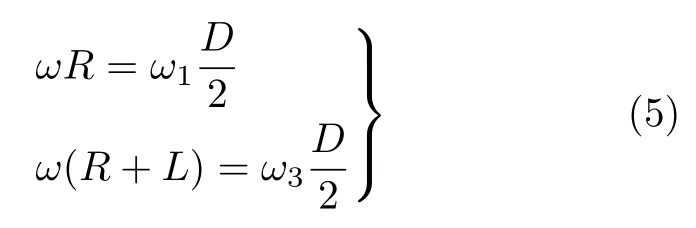
式(4)表明,当指南车处于平面直行工况时,左、右车轮角速度相等(ω1= ω3),中心立柱则保持不转动(ω0= 0),指南运动基本条件自然满足;当指南车处于直行越障或者平面任意转弯工况时,左、右车轮角速度不相等(ω1≠ ω3),中心立柱则发生转动(ω0≠ 0),此时若要满足指南运动基本条件式(1),需保证指向器转动角速度(等同中心立柱角速度ω0)与车身整体转动角速度ω大小相等且方向相反(ω = -ω0)。设指南车转弯半径为R,左、右车轮的间距为L,车轮直径为D。以指南车左转弯为例,则两车轮轮心所在平面上存在关系式
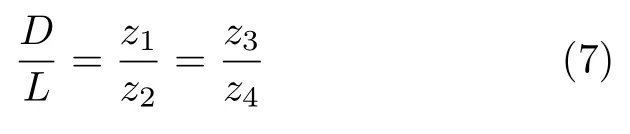
由式(5)和式(4)联合可推知

最后获得了指南车基本运动条件满足时车轮间距L与车轮直径D的尺寸设计要求
1.3 传动和离合机构设计方案
传动机构是新型指南车的核心部分,这里依据基本运动关系分析的结果进行设计(z1=z2,L=D)。出于设计和加工制造的便利,图1(右)中齿轮分成四组处理,其齿轮参数如表1所示;且为了保证传动过程中行星轮受力均匀,传动机构中使用了两个行星轮对称布置[4]。

表1 传动机构的各组齿轮参数Table 1 Gear parameters of each group of transmission mechanism
离合机构是新型指南车的关键部件,其结构是由牙嵌式离合器、连杆和推杆等组成。其中牙嵌式离合器是利用一对离合器环面上的齿牙互相嵌合或分离来实现主从动轴的离合状态切换;齿牙有矩形、梯形、三角形、锯齿形和螺旋形等形式,由于中心立杆承受的扭矩较小,因此这里采用三角形齿牙;为有效降低齿牙接合瞬间的错牙现象,牙嵌式离合器的齿牙数应不低于180。连杆的功能是用来连接牙嵌式离合器和推杆;直行越障等工况引起推杆的水平摆动,进而带动连杆来控制牙嵌式离合器的分离与接合。
2 新型指南车构造及零件设计
2.1 车轮及车壳总成
车轮总成由车轮和车轮端盖两部分组成。如图2所示,车轮又分为轮辋、轮辐和花键轴孔等三部分,与齿轮轴花键部分相连接;车轮端盖通过M10的外螺纹与齿轮轴M10的螺纹孔相连接,其功能是固定车轮和齿轮轴,防止两者间的轴向相对滑动。车轮的直径D与两车轮的间距L相等,考虑到加工制造的尺寸限制,初定车轮直径D=450 mm,车轮的厚度为30 mm。
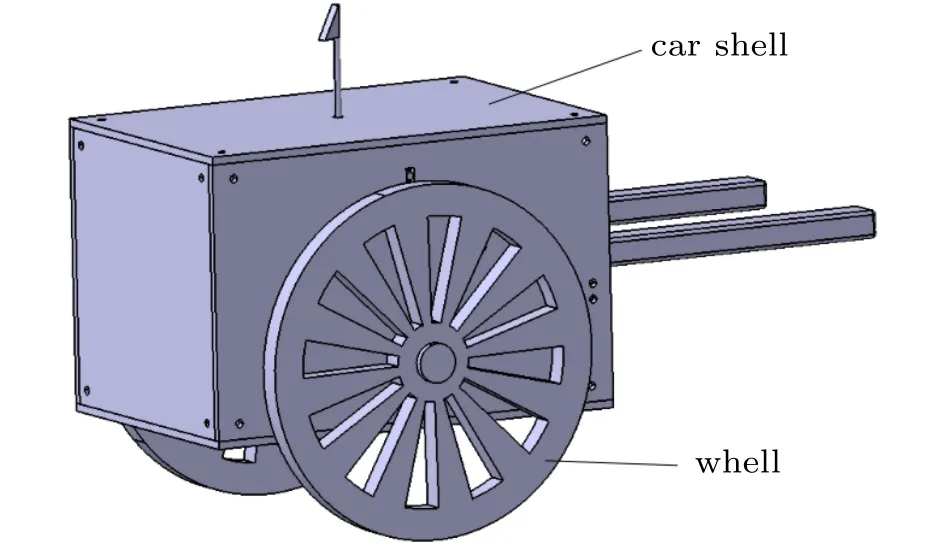
图2 车轮及车壳总成Fig.2 Wheel and body shell assembly
车壳总成由左右两侧板、前后挡板、顶板、底板、角块、卡块和轴块共同组成。六块板的厚度均为10 mm,板之间的接合是通过八个带有M10螺纹孔的立方体角块和若干M10的标准螺栓完成;两个卡块对称螺接到左右侧板上,功能是支撑离合机构的推杆。两个轴块对称螺接到后挡板且分别与左右侧板相连接,起到对推杆的支撑和限位作用。
2.2 传动机构总成
传动机构总成包括八个齿轮、两根齿轮轴和一根中心立柱。如图3所示,齿轮轴1一端与齿轮1相连接,另一端与一侧车轮相连接;齿轮轴2一端与齿轮3相连接,另一端与另一侧车轮相连接;齿轮4和齿轮5固联且与中心立柱下部相连接,齿轮2和齿轮6固联,齿轮7和齿轮8借助系杆同时与齿轮5和齿轮6啮合。中心立柱上部通过套筒和离合机构的牙嵌式离合器相连接。
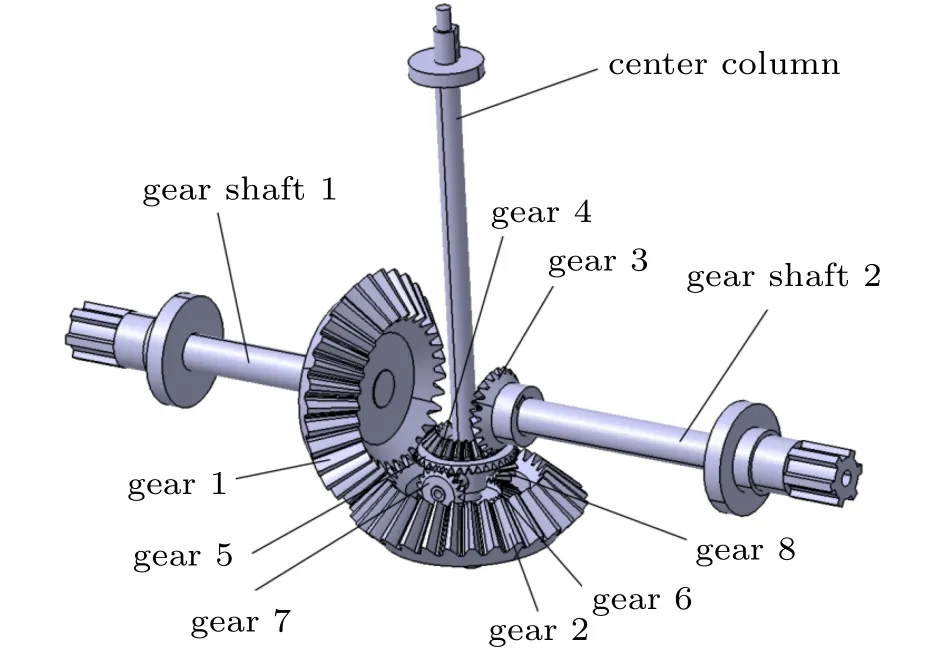
图3 传动机构总成Fig.3 Transmission mechanism assembly
2.3 离合机构总成
离合机构总成由牙嵌式离合器、连杆、推杆和指向器共同组成。如图4所示,通过控制离合套的升降来实现牙嵌式离合器的分离与接合状态,其分离状态对应直行越障工况,可以保证该工况下两个车轮的转角差不触发指向器的偏转。

图4 离合机构总成Fig.4 Clutch mechanism assembly
连杆机构主要由一对连杆和一对推杆组成。如图5所示,直行越障和平面转弯等工况引起推杆的水平摆动变化,进而通过连杆带动离合套沿车壳左右侧板的滑槽垂直升降,完成牙嵌式离合器的分离与接合。
具体地,当指南车处于直行越障工况时,如图5(左)所示,连杆处于垂直位置;牙嵌式离合器上盘和下盘处于分离状态,此时指向器与中心立柱之间的传动断开,如此直行越障过程中带来的扰动不会影响指南功能。而当指南车处于平面转弯工况时,如图5(右)所示,左、右推杆在水平方向摆动,继而带动连杆偏离垂直位置,这使得牙嵌式离合器上盘下移,且与下盘相接合,此时指向器与中心立柱之间的传动恢复,中心立柱的转动通过牙嵌式离合器带动指向器反向偏转,如此在平面转弯时保持指南功能。

图5 牙嵌式离合器的分离状态(左)和接合状态(右)Fig.5 Disengaged state of the tooth-mounted clutch (left) and engaged state of the tooth-mounted clutch (right)
牙嵌式离合器的引入可以有效地补充和完善差动轮系传动机构,顺畅地实现平面直行、平面任意转弯和直行越障等多工况的切换,保证新型指南车以不同的机构传动状态应对不同的工况,最终在比较高的精度下实现指南功能。
2.4 新型指南车整体模型
全部零件完成建模后,在CATIA软件中依次装配成车轮和车壳总成、传动机构总成和离合机构总成等,最后总装配成一体,即可获得新型指南车的整车模型。其外部面貌如图6(左)所示,内部结构如图6(右)所示。
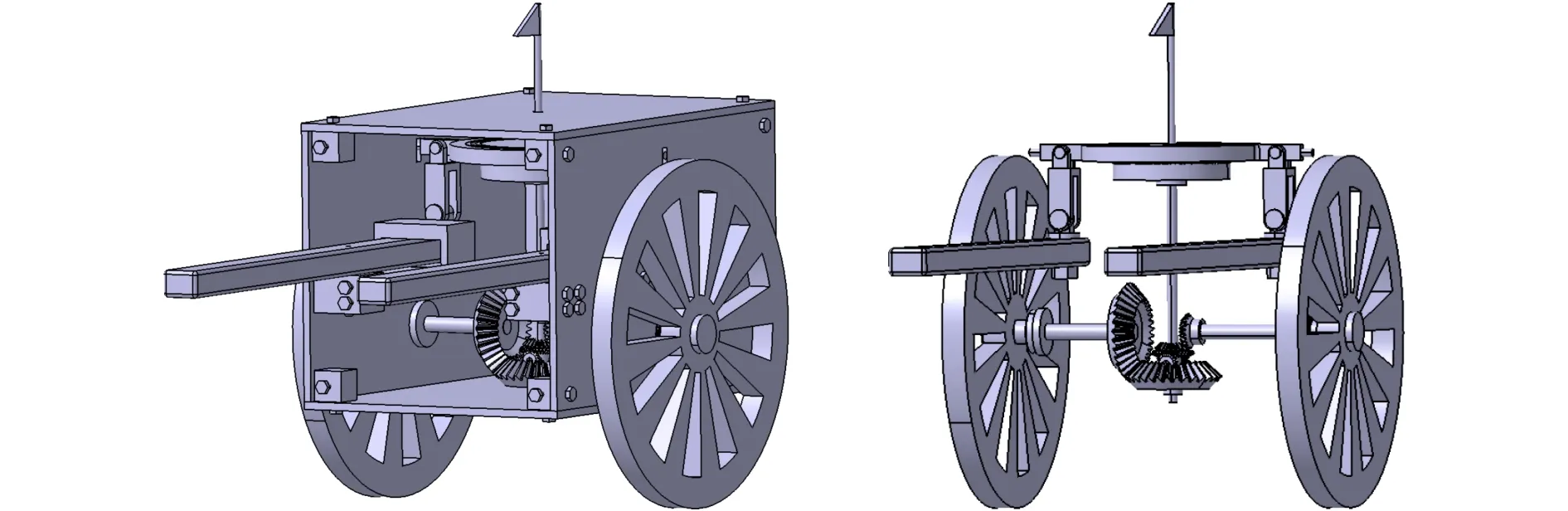
图6 新型指南车的外部面貌(左)和内部结构(右)Fig.6 Outer part of the new south-pointing chariot(left) and inner part of the new south-pointing chariot (right)
3 新型指南车运动机构仿真及样车功能实测
新型指南车总成装配完毕后,接下来将对其进行直行越障工况和平面转弯工况下的运动机构仿真分析,这里通过CATIA中数字样机(Digital mock-up,DMU)模块对新型指南车进行运动学仿真。为进一步验证新型指南车设计的可行性,本文对牙嵌式离合器和差动齿轮等精细零件进行了3D打印试制,对车轮及车壳总成、连杆和推杆等零件进行了机加工制备,并根据装配关系完成了新型指南车的样车组装,进而对其实施了直行越障和平面转弯等工况的样车功能测试。
3.1 直行越障工况的运动仿真及功能实测
在DMU模块中的命令窗口,编辑公式设置左车轮转速为35°/s,右车轮的转速为30°/s,同时设置牙嵌式离合器处于分离状态,即可模拟新型指南车的直行左车轮越障工况。如图7(左)所示,新型指南车的红旗指向相对车架随动坐标系和地面参考系均未发生偏转,始终保持正确的初始指向。
选择有障碍的路段(地面上堆起一个纸凸起)对新型指南车样车进行直线越障工况的功能测试,初始令样车保持平面直行,待左车轮越过纸凸起时,观察新型指南车的红旗指向变化(整个样车实测过程进行录像),样车越过障碍的瞬间如图7(右)所示。实测结果表明,新型指南车样车在直行越障工况下,样车始终保持正确的初始指向,越过障碍的过程中牙嵌式离合器处于分离状态,尽管由于越过障碍物导致两车轮存在差速,但红旗指向不会改变,达到了预期设计目标。
图7 直行越障工况下DMU运动学仿真(左)和样车功能实测(右)Fig.7 DMU kinematic simulation under the condition of straight-drive over obstacle (left) and the functional testing of the prototype vehicle (right)
3.2 平面转弯工况的运动仿真及功能实测
在DMU模块中的命令窗口,编辑公式设置左车轮转速为40°/s,右车轮的转速为30°/s,同时设置牙嵌式离合器处于接合状态,即可模拟新型指南车的平面向右转弯工况。如图8(左)所示,新型指南车的红旗指向相对车架随动坐标系有ψs角度偏转,但指南车转弯时车架相对于地面参考系存在偏转角度η,差动齿轮的传动关系可以保证角度满足关系η = –ψs,如此可以确保最终的红旗指向相对地面参考系的角度φ如式(1)所示不发生偏转,即保持了正确的指南方向。
选择一个平面路段对新型指南车样车进行平面转弯工况的功能测试,初始令样车保持平面直行,待行驶一段距离后开始右转弯,然后继续平面直行,再次右转弯,平面直行,周而复始,观察新型指南车的红旗指向变化(整个样车实测过程进行录像),样车平面右转弯的瞬间如图8(右)所示。实测结果显示,新型指南车样车在平面转弯的工况下,样车车架相对于地面存在偏转角度η,此时样车的推杆在水平面内有摆动,进而通过连杆带动离合套沿左右侧板的滑槽垂直下降,此时牙嵌式离合器处于接合状态,样车的红旗指向相对车架有一个反向偏转角度ψs,最终样车的红旗指向相对地面的角度φ并未发生偏转,始终保持了正确的指南方向,达到了预期设计目标。
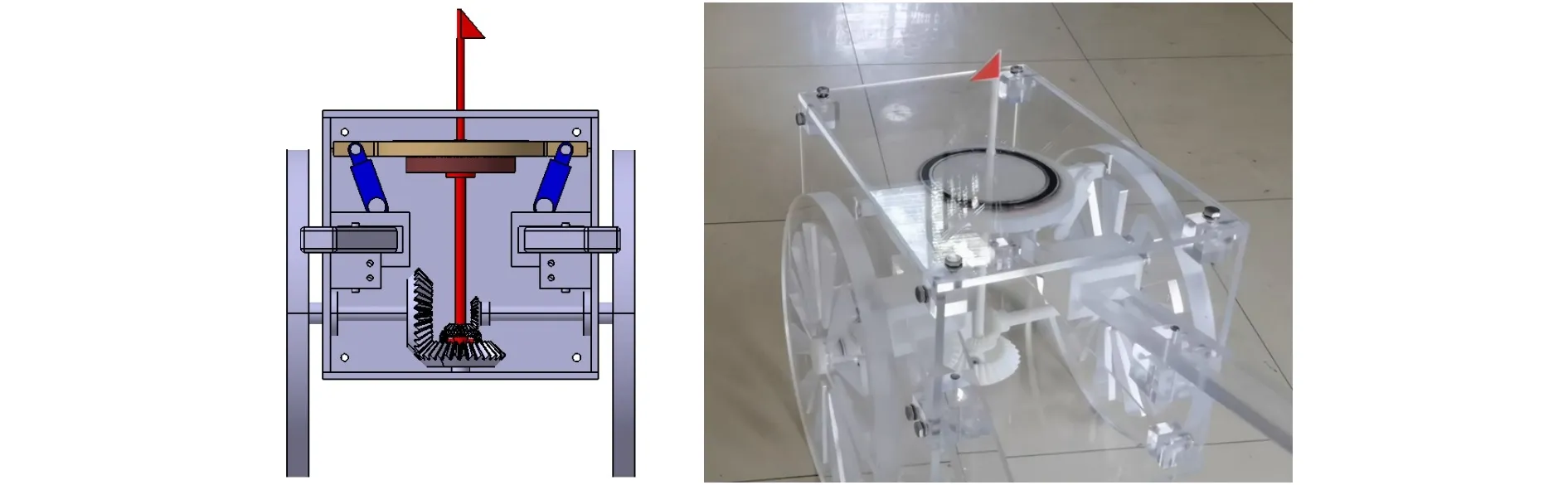
图8 平面转弯工况下DMU运动学仿真(左)和样车功能实测(右)Fig.8 DMU kinematic simulation under the condition of plane turning (left) and the functional testing of the prototype vehicle (right)
4 结论
本文综合了定轴齿轮机构的直线越障优势与差动轮系机构的任意转弯优势,开发设计的新型指南车以差动式指南车的差动轮系为主体结构,并引入关键部件−牙嵌式离合器来控制指向器与中心立柱的分离与接合。一方面,平面直行或直行越障工况下牙嵌式离合器处于分离状态,即指向器与中心立柱间的连接关系断开,此时地面工况引起的车轮差速变化不会触发指向器偏转;另一方面,平面转弯工况下借助推杆和连杆传动使得离合套沿左右侧板的滑槽垂直下降,此时牙嵌式离合器回归接合状态,即恢复指向器与中心立柱间的连接关系,此时地面工况引起的车轮差速和转向变化,通过精心设计的差动齿轮的传动关系可以确保车架相对于地面的偏转角度η与指向器相对车架的偏转角度ψs等值反向,最终使得指向器相对地面的角度φ不发生偏转,亦即保持了正确的指南方向。针对前述设计理念和具体设计方案,基于CATIA中数字样机DMU模块对新型指南车进行了直行越障和平面转弯等工况的运动机构仿真,通过3D打印试制和机加工制备实现了新型指南车的零件制备和样车组装,进而完成了对应工况的样车功能实测,仿真和实测结果均验证了新型指南车设计的可行性和有效性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
车主之友(2022年4期)2022-08-27
汽车实用技术(2022年10期)2022-06-09
电子制作(2019年10期)2019-06-17
电子制作(2018年14期)2018-08-21
中国科技纵横(2017年13期)2017-08-09
电子制作(2017年10期)2017-04-18
汽车维修技师(2017年9期)2017-02-04
电子制作(2017年23期)2017-02-02
汽车维修与保养(2015年12期)2015-04-18
