
香菇菌棒包装袋撑圆装置关键技术研究
2022-08-23 07:34车娟李红斌
包装工程 2022年15期
车娟,李红斌
香菇菌棒包装袋撑圆装置关键技术研究
车娟,李红斌
(苏州健雄职业技术学院,江苏 太仓 215411)
为了提高香菇包装机的包装效率,提升包装机的整体性能。首先分析研究包装袋基本参数、拉伸特性、人工套袋方式,通过类比人工套袋得到撑圆装置设计方案。基于此方案,对撑圆装置的关键结构尺寸参数进行详细设计。建立了三维模型并导入Ansys进行静力学分析,得到了撑圆装置的应力分布云图。撑圆机构动作过程中受到的最大压应力为2.48 MPa,远小于树脂材料弯曲强度67 MPa;最大变形量为0.175 mm,出现在撑圆机构最前端,不影响后序动作。文中证明了撑圆装置结构设计的合理性和模型建立的准确性,为同类型结构的设计提供一定的理论参考。
香菇;包装袋;撑圆装置;结构设计
香菇具有极高的营养价值,是人们生活中常见的食物,总产量占据食用菌榜首[1-2],主要采用菌棒栽培的方式[3]。目前,中国正步入老龄化社会,农村青壮年人口正向城市转移,农业劳动力日益缺失,人力成本不断攀升。为了降低人力成本,同时防止由作业人员带来的细菌感染香菇,迫切需要实现香菇菌棒采集包装的自动化,不断推动香菇种植产业化进程[4-7]。
为保证香菇的水分,同时避免菌棒受到杂菌感染,保水膜加菌袋的双层包装方式已成为主流[8-9]。目前,香菇菌棒的菌料搅拌、菌料装袋的自动化已有普及,而在菌棒出料筒套袋接料环节大部分为人工操作方式[10]。张凯等[11]基于圆柱坐标系统设计了一种葡萄自动装袋设备;万其号等[12]设计了一种能够完成牧草切割、装袋的青贮复合套袋装置;卢国宝等[13]研究了一种食用菌自动装袋设备,装袋机构位于下料口下方,通过固定的弹性片将下方的菌袋撑起进行装袋工序。
目前,国内有一些关于自动套袋装置的研究,但是这些研究对象的包装袋和包装物料的直径相差较大。另外有关菌类自动包装的研究集中在单层袋包装方式,对双层袋自动装袋方案研究较少。整个自动装袋过程的核心装置为可以使包装袋展开变圆的撑圆机构,因此对撑圆装置关键技术展开详细研究十分必要,可为同类型产品设计提供重要的理论指导。
1 香菇菌棒包装装袋参数及套袋方式
1.1 保水膜与菌袋构造参数
如图1a、b所示为保水膜和菌袋的构造,保水膜为平口型,菌袋为折边型。
此次研究采用的保水膜、菌袋、出料筒的相关参数见表1。
1.2 包装袋拉伸特性研究
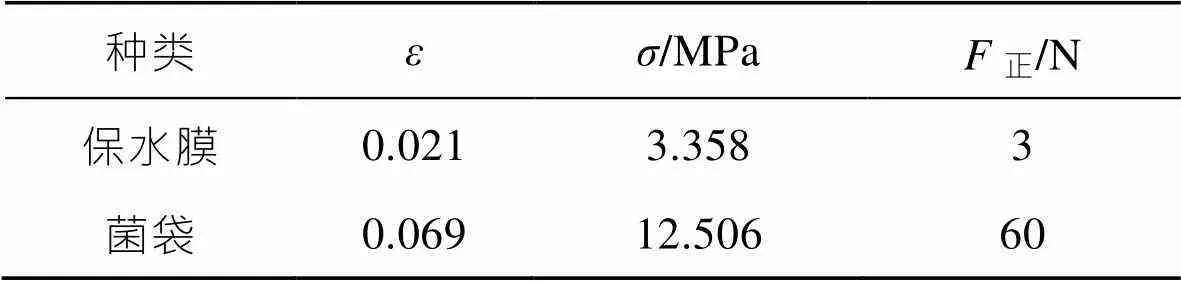
菌袋和保水膜在展开撑圆时会受到拉伸作用从而发生形变,当受到的应力不同时,对撑圆机构的反作用力也不同,因此需要进行拉伸特性研究。菌袋和保鲜膜拉伸实验的相关参数见表2—3,拉伸试验选取的样品数为5,测试不同位置(1—3)的宽度和厚度。
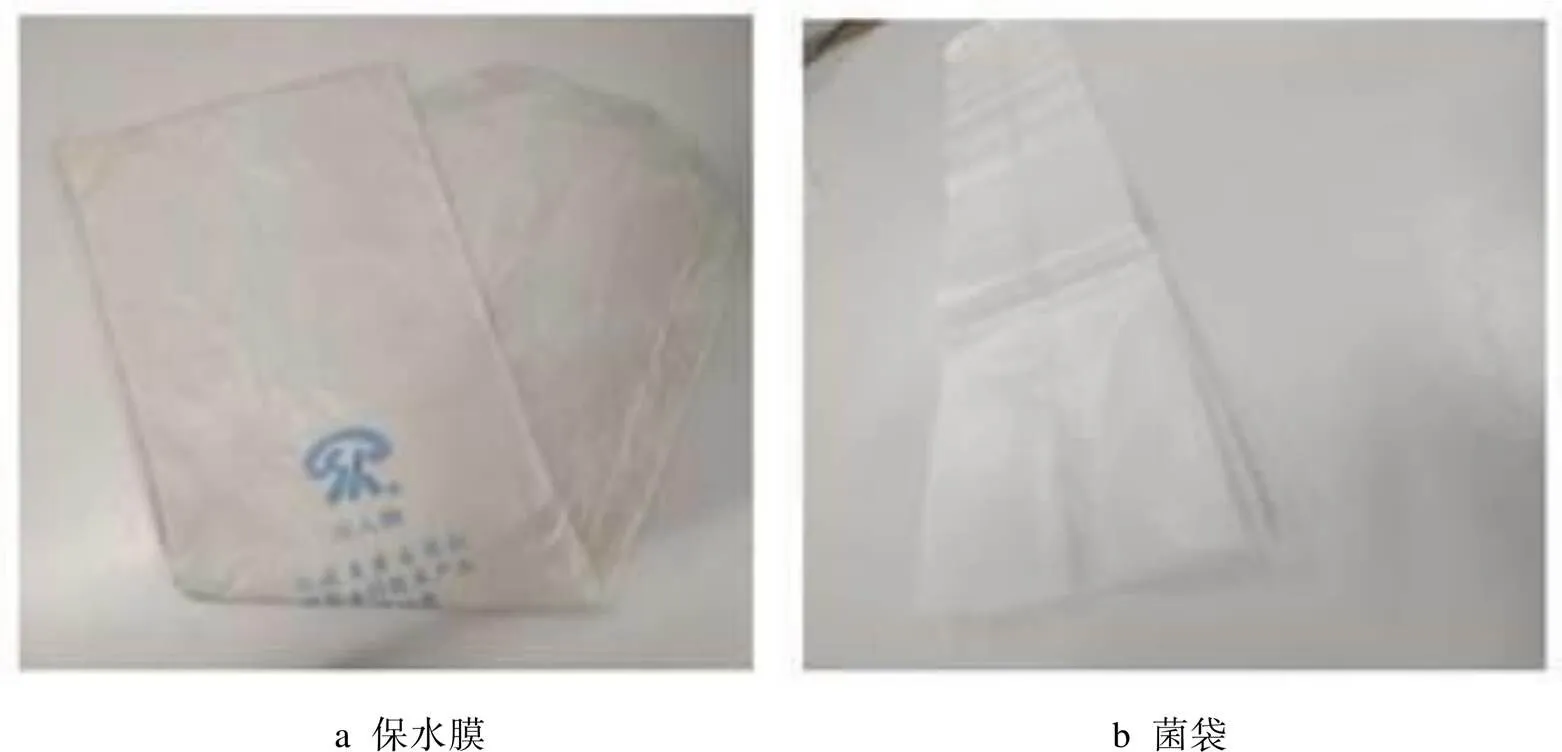
图1 香菇菌棒包装袋形式
表1 保水膜、菌袋、出料筒相关参数

Tab.1 Relevant parameters of water retaining membrane, bacteria bag and discharging barrel
表2 菌袋试样参数
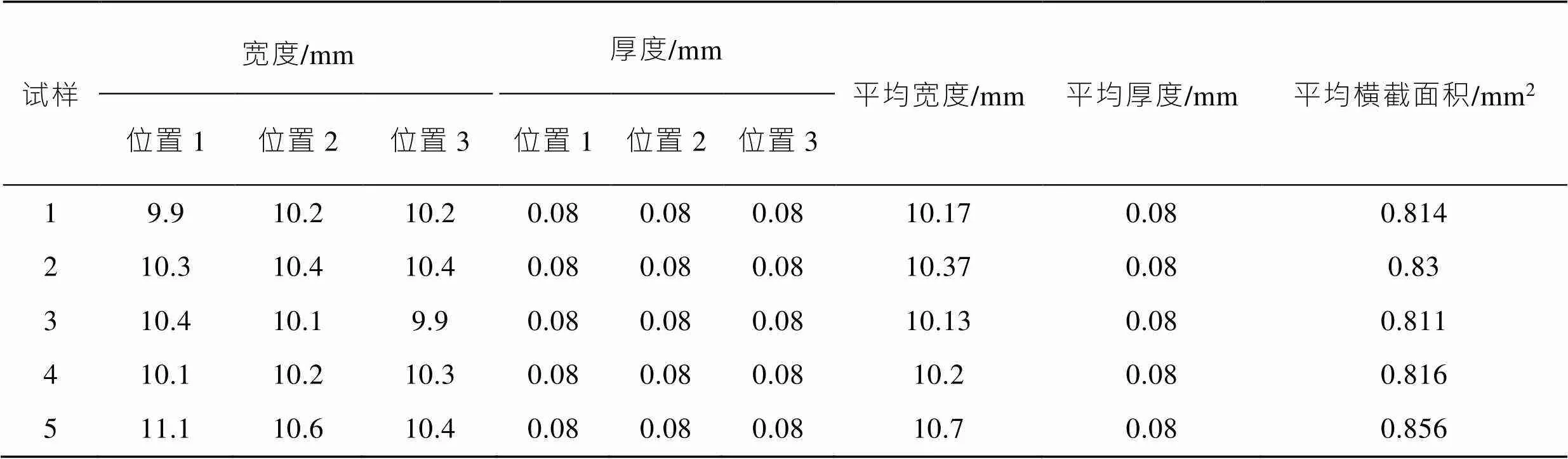
Tab.2 Parameters of bacteria bag sample
表3 保水膜试样参数
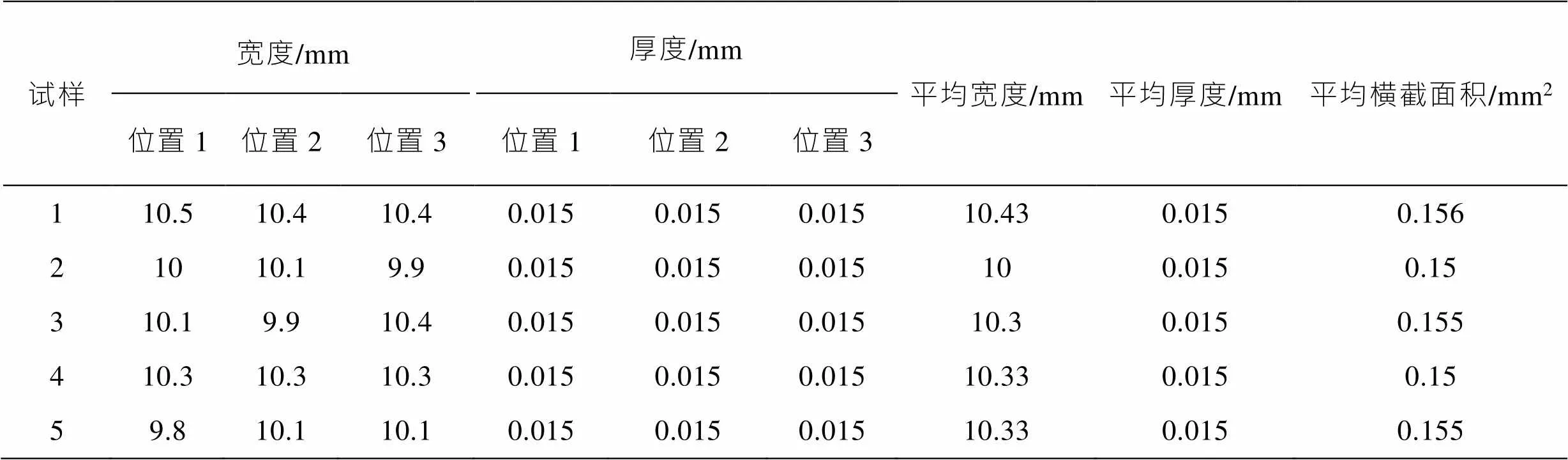
Tab.3 Parameters of water retaining membrane sample
此次实验按照GB/T 1040.3—2006《塑料拉伸性能测定》进行,可得到菌袋与包装袋拉伸力与位移的关系,见图2—3。
不同试样的应力‒变形曲线可由式(1)得到,然后对5组应力、变形值分别取平均数可得到菌袋和保水膜的应力‒变形曲线见图4—5。
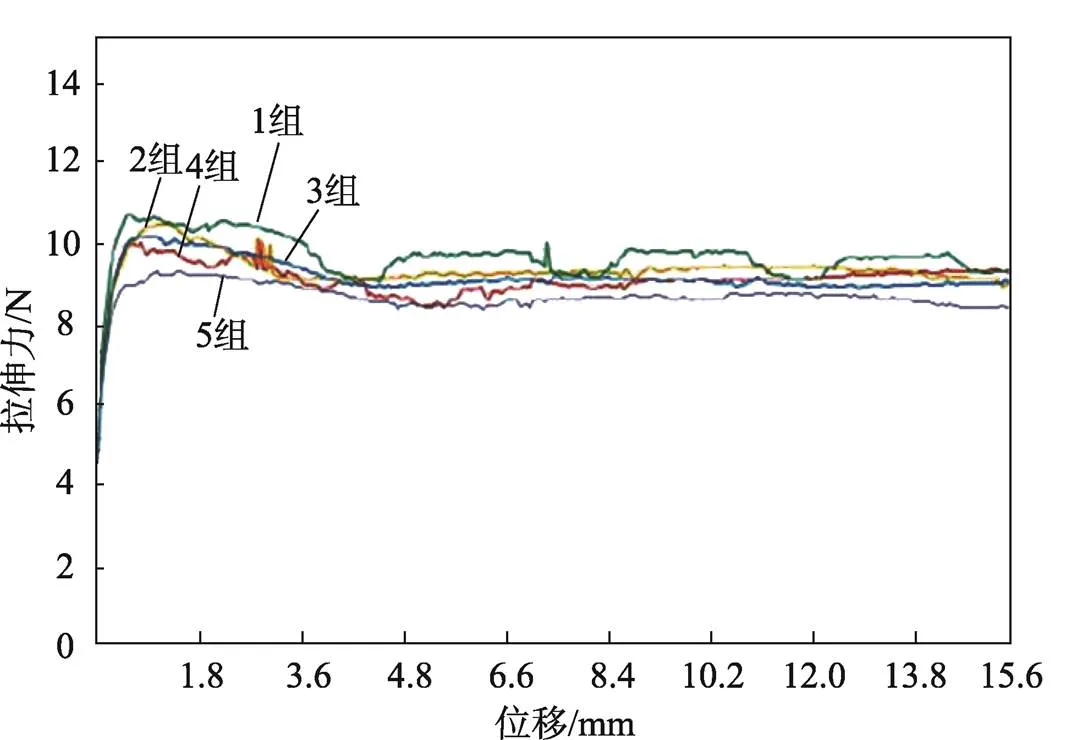
图2 菌袋拉伸力与位移变化曲线
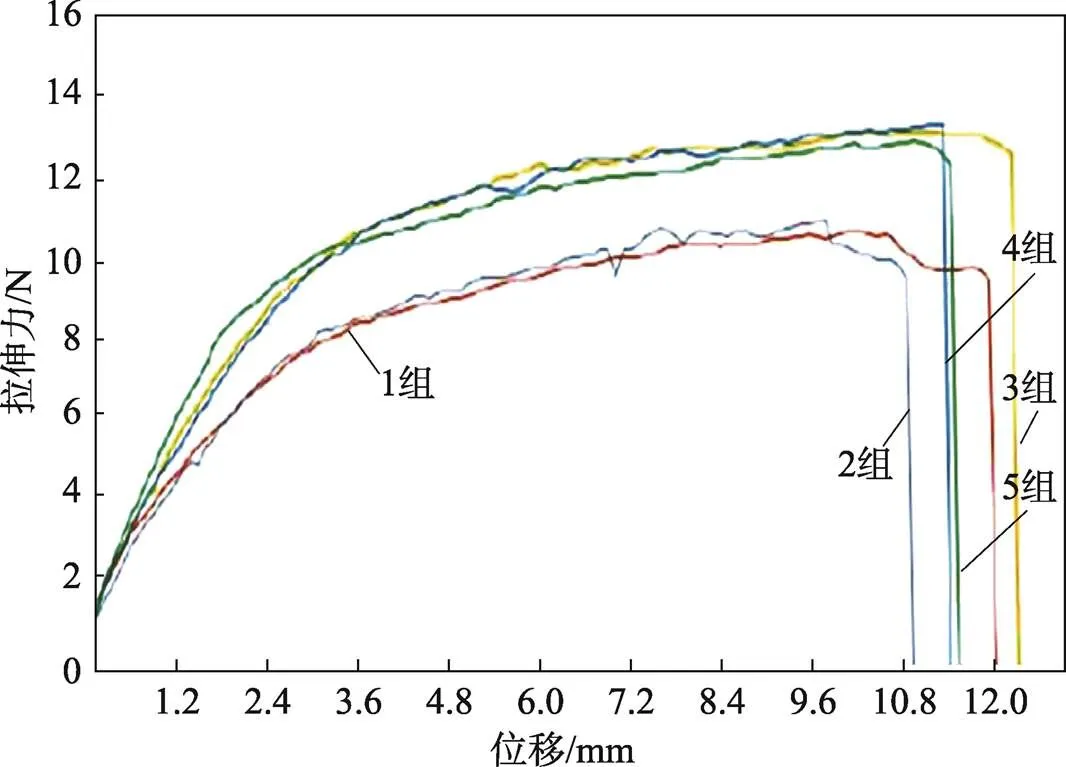
图3 保水膜拉伸力与位移变化曲线
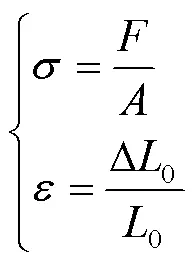
式中:σ为应力;F为测试样品所受拉力;A为样品原始横截面积;ε为应变;L0样品标距;ΔL0为标距增量。
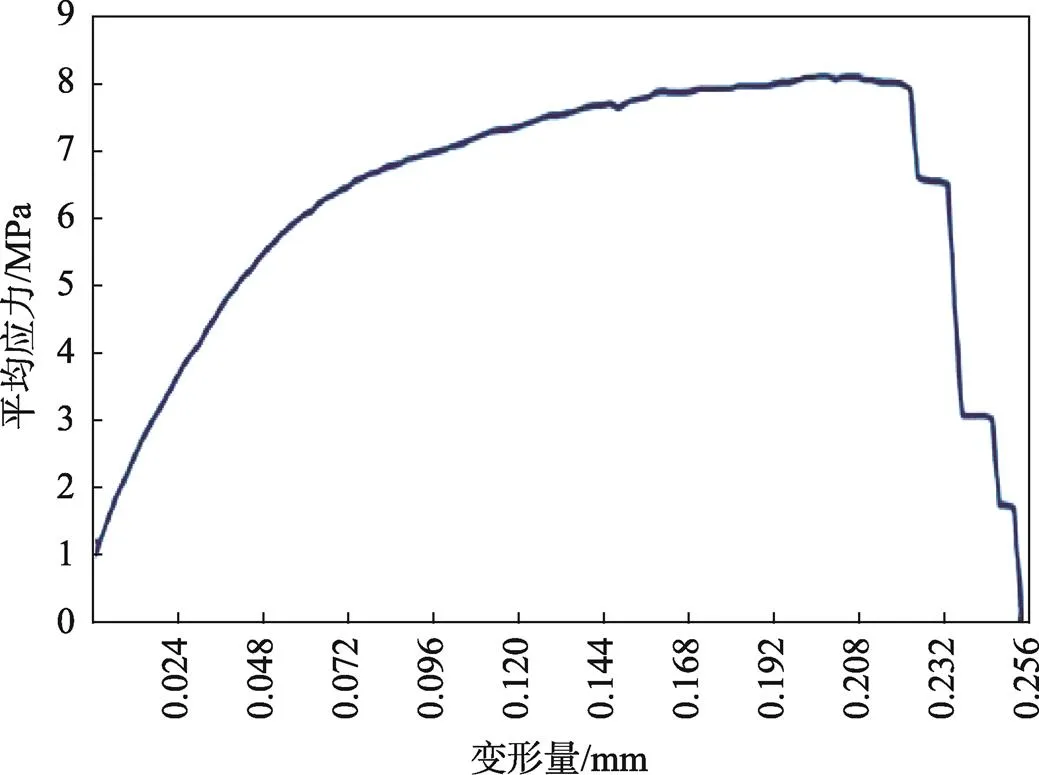
图5 保水膜应力‒变形量变化曲线
1.3 香菇菌棒人工套袋方式分析
香菇菌棒的人工套袋根据是否套有保水膜分为两层袋和单层袋。保水膜方案可以保留香菇的水分,保证香菇的食用口感和商品价值。两层袋方案需保证保水膜失效长度不超过2 cm,菌袋不能有任何损伤。
如图6所示为人工套袋示意图。首先操作员从装袋盒里取出保水膜和菌袋,在出料筒套保水膜时,操作员会首先将袋子后部撑开套在出料筒上并不断向前拖动,通过出料筒将整个保水膜打开,使香菇进入;而菌袋一般为折边式袋子,且不能破损,因此为了防止菌袋与出料筒的摩擦,操作员只能拖住菌袋底部进行装袋操作。

图6 人工套袋示意图
2 香菇菌棒撑开装置
根据人工装袋的工序,一个完整的香菇菌棒自动包装装置应该包括取袋装置、包装袋撑开装置、套袋装置,其中最核心装置的为包装袋撑开装置,其应该具备的功能分为开口、撑圆2个部分,开口装置负责将包装袋的袋口进行预开,撑圆装置负责将微开的包装袋撑成圆筒状以方便套袋装置可以将包装袋顺利套在出料筒上。
文中设计的开口和撑圆装置见图7—8,当取袋装置将包装袋运至开口装置吸嘴中间时,包装袋上下表面在真空吸嘴的作用力下会将袋口打开。撑圆装置移动至袋口处使撑圆机构进入预开的袋口中,此时丝杠电机启动在丝杠作用下,撑圆机构展开,将包装袋口进一步撑圆,最终可以套在出料筒上。
3 香菇菌棒撑圆装置关键技术
撑圆机构为撑圆装置的核心,用于将包装袋撑圆、撑大。由于撑圆机构与包装袋直接接触,对撑圆机构的结构参数和强度分析尤为重要。
3.1 撑圆机构主要尺寸设计
撑圆机构的主视图与俯视图(上半边结构)见图9。图9a中的半圆为出料筒,其半径为50 mm,包装袋要完全包络出料筒,为防止干涉,撑圆机构弧形内表面上方与两侧要超出出料筒3 mm。菌袋折边后长度为40 mm,为防止撑破菌袋,撑圆机构弧形区外径高度应设置为38 mm。
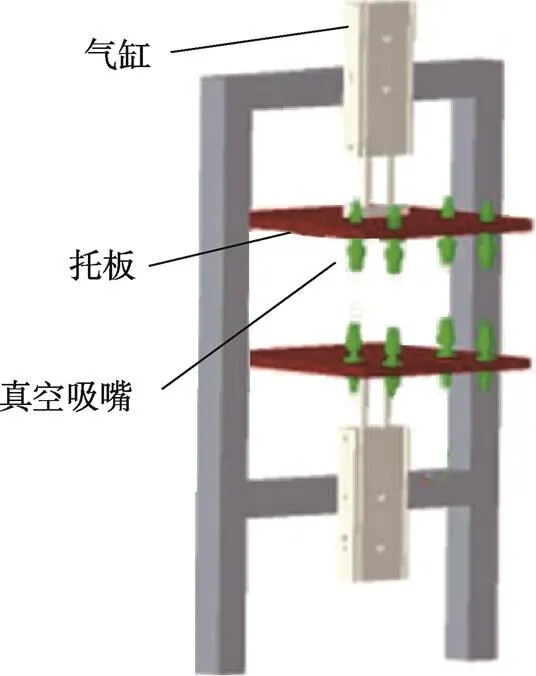
图7 开口装置示意图

图8 撑圆装置示意图
当包装袋撑起时,出料筒会伸入撑圆装置内部与包装袋接触,进行香菇菌棒的出料。套袋完成后,撑圆机构需要平移出袋口复位。为避免干涉,需保证袋子覆盖出料筒的长度与撑圆机构长度之和小于料筒长度,同时考虑到能有效撑圆,设定总长度为85 mm、有效撑圆长度为30 mm,见图9b。
3.2 撑圆机构静力学分析
由图9 a可知,撑圆机构实际运动距离和壁厚的关系见式(2)。
式中:为运动距离;为壁厚。
从式(2)可以看出,壁厚越薄对应的运动距离越短,撑圆工序耗时越短,但是抵抗外应力作用的能力也随之下降,因此需要对撑圆机构进行静力学分析,文中设定壁厚为4 mm进行后续分析。
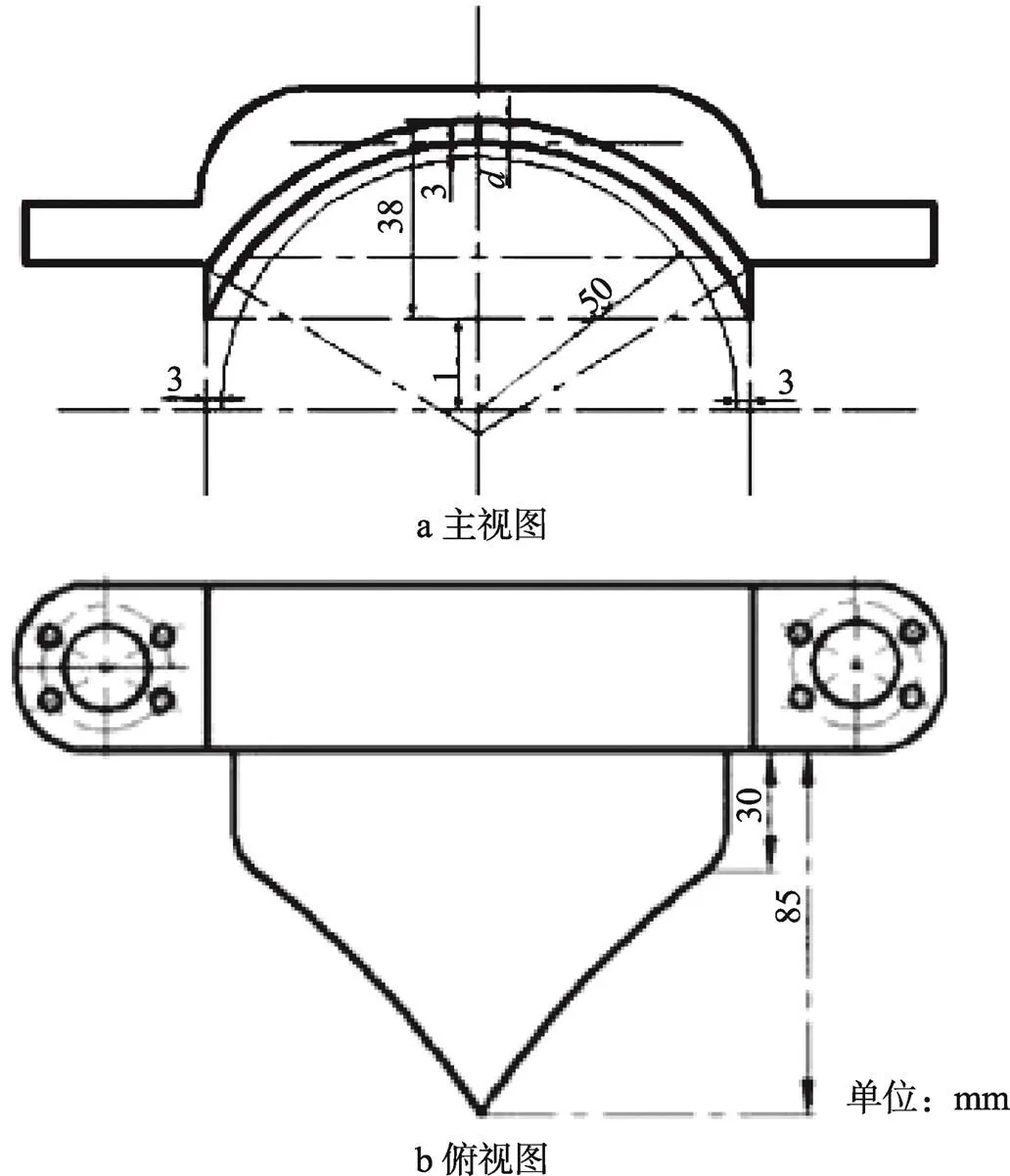
图9 撑圆机构主视图与俯视图
撑圆机构受到包装袋外应力作用见图10,对应关系见式(3)。
式中:正为包装袋与撑圆机构间正压力;为撑圆后侧边压力;为撑圆后侧边压应力;侧为侧边与袋口接触有效面积;为有效撑圆长度;为包装袋厚度。
侧边压应力与包装袋的应变有关,对包装袋分析,其应变计算式见式(4)。
式中:为撑圆后包装袋袋口周长;为撑圆机构上弧半径;为撑圆机构上弧角度;为撑圆机构上升高度;为撑圆机构侧边壁厚;Δ为包装袋形变量;为包装袋初始袋口周长;为应变。各参数值见表4,将参数代入式(2)—(3)可得结果见表5,其中侧边压应力可根据应力‒变形量(图4—5)的关系获得。
由表5可以看出,菌袋对于撑圆机构上表面压力较大为60 N。利用Proe绘制的撑圆机构3D模型见图11,采用软件测量可得上表面面积上为5 460 mm2。通过式(5)计算可得上表面受到的压应力为11 kPa。
表4 结构参数

Tab.4 Structure parameters
表5 计算结果
Tab.5 Calculation results
为保证撑圆机构在正常使用时不会受力损伤,将三维模型导入Ansys软件进行静力学分析,分析撑圆机构所受压应力是否超过材料的强度极限,撑圆机构采用树脂材料,相关参数见表6。
网格划分精度设定为0.4 mm,撑圆机构支架在两边施加固定约束,对撑圆机构上表面施加11 kPa的压力约束,最终得到的撑圆机构受力分布见图12—13[14-15]。
由图12可知,撑圆机构受到的最大压应力为2.48 MPa,远小于树脂材料的弯曲强度67 MPa。由图13可知,撑圆机构最大变形量(0.175 mm)发生在前端,此变形量很小,不会影响机构的后续动作。综上,文中对撑圆机构的结构设计合理。
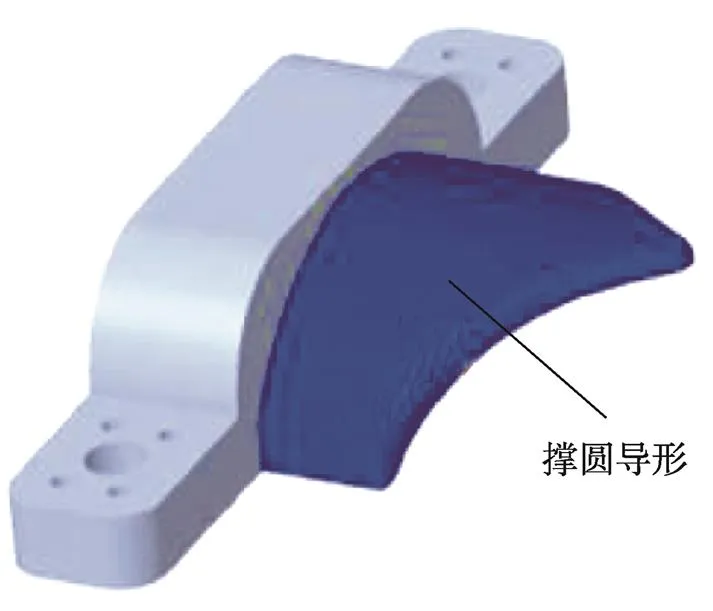
图11 撑圆机构3D模型
表6 材料定义

Tab.6 Definition of material
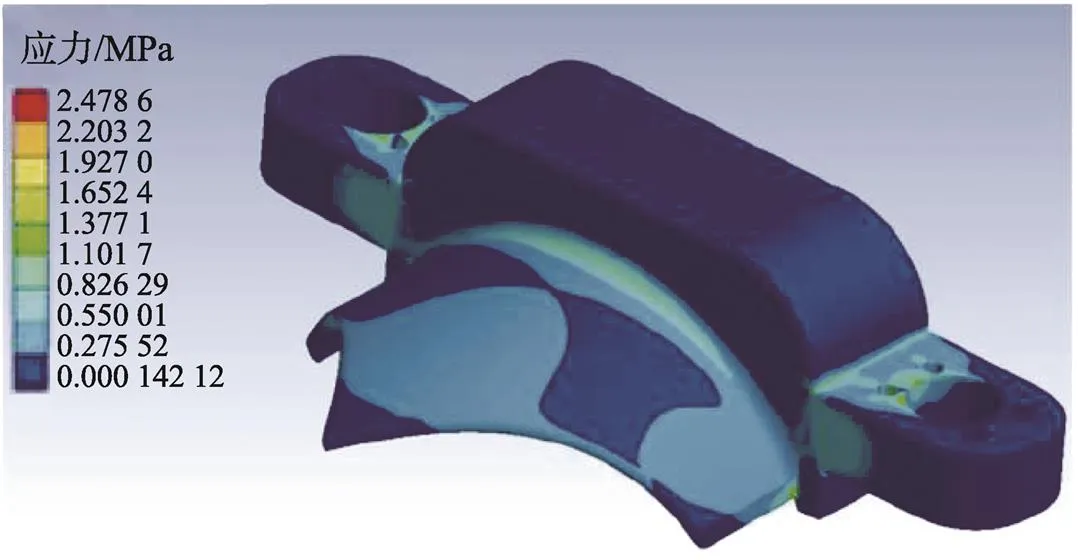
图12 撑圆机构应力图
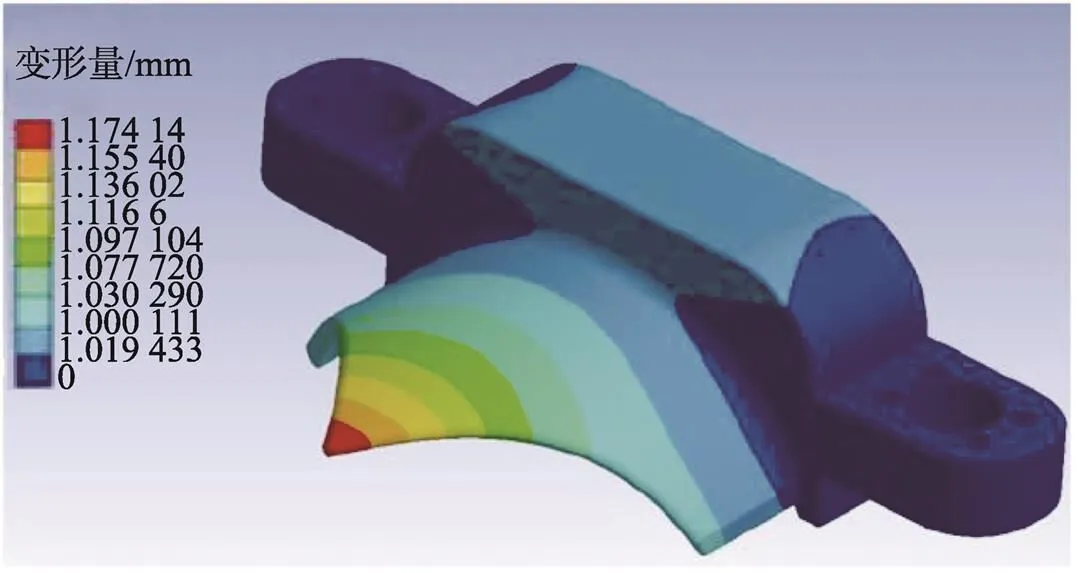
图13 撑圆机构变形图
4 结语
香菇具有较高的营养价值,是人们生活中常见的食物,为防止香菇水分的流失目前都采取两层袋包装方案。关于香菇菌棒的自动化包装方式研究日益增多,其中最为核心装置为可以将包装袋展开撑圆的撑圆装置。
文中首先测量菌袋和保水膜的常规尺寸,对包装袋的拉伸特性和人工香菇菌棒包装方式进行分析。根据人工装袋的作业方式设计出自动包装环节中撑圆装置的方案,基于此方案对撑圆装置的关键结构参数进行了详细设计,建立三维模型并导入Ansys进行静力学分析。结果表示,撑圆机构动作过程中受到的最大压应力为2.48 MPa,远小于树脂弯曲强度67 MPa;最大变形量仅为0.175 mm,出现在撑圆机构最前端不影响后序动作。文中证明了撑圆装置结构设计的合理性和模型建立的准确性,为同类型结构的设计提供一定的理论参考。
[1] 李玉, 尚晓冬, 宋春艳, 等. 中国香菇栽培模式现状及透气袋模式技术要点[J]. 农业工程技术, 2017, 37(16): 13-17.
LI Yu, SHANG Xiao-dong, SONG Chun-yan, et al. Present Situation of Cultivation Mode of Lentinus Edodes in China and Technical Points of Breathable Bag Mode[J]. Agricultural Engineering Technology, 2017, 37(16): 13-17.
[2] 孟庆国. 制作香菇菌棒应注意的问题[J]. 农村百事通, 2013(15): 41-42.
MENG Qing-guo. Problems Needing Attention in Making Mushroom Sticks[J]. Rural Know It All, 2013(15): 41-42.
[3] 任宏力. 陕西省商洛市香菇生产现状及发展对策[J]. 园艺与种苗, 2016, 36(5): 29-30.
REN Hong-li. Production Status and Development Countermeasures of Lentinns Edodes in Shangluo City of Shaanxi Province[J]. Horticulture & Seed, 2016, 36(5): 29-30.
[4] 徐娜, 张莉琴. 劳动力老龄化对我国农业生产效率的影响[J]. 中国农业大学学报, 2014, 19(4): 227-233.
XU Na, ZHANG Li-qin. Impact of Aging Labor Force on Agricultural Production Efficiency in China[J]. Journal of China Agricultural University, 2014, 19(4): 227-233.
[5] 黄双成, 李志伟, 张秋红. 基于单片机的食用菌装袋机设计与实现[J]. 机电一体化, 2017, 23(9): 53-57.
HUANG Shuang-cheng, LI Zhi-wei, ZHANG Qiu-hong. The Design and Implementation of the Edible Fungus Sack Filling Machine Based on Single Chip Microcomputer[J]. Mechatronics, 2017, 23(9): 53-57.
[6] LIU S R, ZHANG W R. Production of Stalk Spawn of an Edible Mushroom ( Pleurotus Ostreatus ) in Liquid Culture as a Suitable Substitute for Stick Spawn in Mushroom Cultivation[J]. Scientia Horticulturae, 2018, 24(8): 32-34.
[7] 卢淑芳. 磐安县香菇菌棒工厂化生产技术探索与思考[J]. 食药用菌, 2016, 24(5): 278-280.
LU Shu-fang. Exploration and Thinking on Industrial Production Technology of Lentinus Edodes Rod in Pan'an County[J]. Edible and Medicinal Mushrooms, 2016, 24(5): 278-280.
[8] 涂天虎. 免割保水膜袋在香菇栽培上的应用效果及关键技术[J]. 安徽农学通报(上半月刊), 2010, 16(11): 137.
TU Tian-hu. Application Effect and Key Technology of Cutting-Free Water-Retaining Film Bag in Lentinus Edodes Cultivation[J]. Anhui Agricultural Science Bulletin, 2010, 16(11): 137.
[9] 王丽娜, 葛颜祥, 刘倩. 食用菌工厂化生产的盈亏平衡分析[J]. 黑龙江农业科学, 2018(2): 105-109.
WANG Li-na, GE Yan-xiang, LIU Qian. Breakeven Analysis of Edible Fungus Industrialized Production[J]. Heilongjiang Agricultural Sciences, 2018(2): 105-109.
[10] 吴志珍. 加快食用菌机械化生产发展步伐推进主导产业转型升级[J]. 现代农机, 2012(2): 7-9.
WU Zhi-zhen. Accelerate the Development of Mechanized Production of Edible Fungi and Promote the Transformation and Upgrading of Leading Industries[J]. Modern Agricultural Machinery, 2012(2): 7-9.
[11] 张凯, 赵丽宁, 孙哲, 等. 葡萄套袋智能机器人系统设计与目标提取[J]. 农业机械学报, 2013, 44(S1): 240-246.
ZHANG Kai, ZHAO Li-ning, SUN Zhe, et al. Design and Target Extraction of Intelligent Grape Bagging Robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(S1): 240-246.
[12] 万其号, 王德成, 王光辉, 等. 自走式牧草青贮联合装袋机设计与试验[J]. 农业工程学报, 2014, 30(19): 30-37.
WAN Qi-hao, WANG De-cheng, WANG Guang-hui, et al. Design and Experiment of Self-Propelled Grass Silage Combined Bagging Machine[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(19): 30-37.
[13] 卢国宝, 蔡惠军, 蒋建冰. 菌包装袋机用装袋机构: 中国, 209861823U[P]. 2019-12-31.
LU Guo-bao, CAI Hui-jun, JIANG Jian-bing. Bagging Mechanism for Lentinus Edodes Packing Bag Machine: China, 209861823U[P]. 2019-12-31
[14] STRANG G. An Analysis of the Finite Element Method[J]. New Jersey: Prentice Hall, 1973, 20(12): 24-27.
[15] WILAMOWSKI B M, YU H. Improved computation for levenberg-marquardt training[J]. IEEE Transactions on Neural Networks, 2010, 21(6): 930-937.
Key Technology of Round Supporting Device for Lentinus Edodes Stick Packaging Bag
CHE Juan, LI Hong-bin
(Suzhou Chien-Shiung Institute of Technology, Jiangsu Taicang 215411, China)
The work aims to improve the packaging efficiency of the lentinus edodes packaging machine and improve the overall performance of the packaging machine. First, basic parameters, stretching characteristics and manual packaging methods of the packaging bag were analyzed and studied. The design scheme of the round supporting device was obtained by analogy with manual packaging. Based on this scheme, the key structural dimension parameters of the round supporting device were designed in detail. The 3D model was established and imported into ANSYS for static analysis to get the force distribution pattern. The results showed that the maximum pressure stress of the round supporting mechanism during action was 2.48 MPa, which was much smaller than the bending strength of resin 67 MPa. The maximum strain was 0.175 mm, which happened at the front end of the round supporting mechanism. It did not affect the post sequence action. The design rationality of the round supporting device and the accuracy of model established are proved. It provides a certain theoretical reference for design of similar structures.
lentinus edodes; packaging bag; sound supporting device; structure design
TB486
A
1001-3563(2022)15-0308-07
10.19554/j.cnki.1001-3563.2022.15.036
2021–10–23
江苏省第二批职业教育教师教学创新团队(苏教办师函〔2021〕22号);2020年江苏省高等教育学会专项课题(2020NDKT050)
车娟(1986—),女,硕士,苏州健雄职业技术学院讲师,主要研究方向为机电一体化。
责任编辑:曾钰婵
猜你喜欢
电脑迷(2022年8期)2022-11-08
今日农业(2022年13期)2022-09-15
食品安全导刊·中旬刊(2022年3期)2022-04-15
科学导报(2021年61期)2021-09-26
东坡赤壁诗词(2020年3期)2020-07-04
健康必读(上旬刊)(2019年3期)2019-10-15
农家致富顾问·下半月(2019年7期)2019-09-28
农机使用与维修(2019年2期)2019-03-13
安徽农学通报(2018年8期)2018-05-30
农村百事通(2017年8期)2017-04-26
