应用视频数据识别短跑训练中手臂摆动姿态①
2022-08-24 08:35崔普斌
佳木斯大学学报(自然科学版) 2022年4期
崔普斌
(安徽体育运动职业技术学院,安徽 合肥 230051)
0 引 言
在运动员的短跑训练中,手臂摆动姿态在一定程度上提高短跑训练效果,其中步长与步频是提高短跑成绩的重要因素[1-3]。在短跑运动员日常训练中,手臂摆动过程中会出现错误,影响短跑成绩。因此,在短跑训练中,对运动员的手臂摆动姿态识别非常必要[4-5]。
文献[6]主要利用三轴加速度传感器对人体姿态进行识别与分类,根据三轴加速度传感器在检测过程中获得的X,Y,Z轴等传递的电信号,并根据具体值获得人体姿态在三维空间中特征,结合不同算法和从以上特征中选择子集,利用支持向量机完成动作的识别与分类;文献[7]将惯性传感器与深度学习相结合来识别手臂的动作,使用主成分分析法对得到的特征子集进行降维,利用深度学习中的网格进行数据训练。以上识别方法均取得一定成绩。但以上方法姿态识别中,运动员手臂摆动速度极快,由于传感器的性能限制,微小动作变化难以捕捉,导致识别结果出现误差。为此,本文提出采用视频数据的短跑训练中手臂摆动姿态识别方法。
1 基于视频数据的短跑训练中手臂摆动姿态识别方法
1.1 优化视频数据图割算法
根据运动员在短跑中的手臂动作,将手臂摆动理解为一个关节的五自由度运动,并从中获取一定信息量。对于短跑训练中的手臂摆动姿态来说,可以划分为人体运动和背景数据,在去除背景数据的噪声干扰之后,并提取出完整的手臂摆动图像,能够更加精准的完成识别[8]。这其中就涉及到了视频数据的图割,图像在经过二值分割之后,可以将其转变成一个二元标记的问题。当一幅数据图像的大小为M×N时,可以将其转化为矩阵的形式,且该矩阵的主序为行,是一个一维的矩阵连线[9-10]。对该图像进行分割就是对标记向量进行定义,可以表示为:
A=(A1,A2,…,AM×N)
(1)
式中,标记向量集合中的任意Ai的取值范围为0-1,对于视频数据的图割算法来说,其分割效果可以用Ai的代价函数进行表示,得到:
(2)
式中,Ri(Ai)表示区域代价,R(B)表示关系代价,λ表示两者之间的比重系数。
将上式进行展开,可以得到:
(3)
根据以上函数关系,通过关系反映视频数据中短跑运动员手臂摆动图像的像素关系。代价函数经过定义之后,能够将图割问题视为代价函数的最小化问题[11-12]。在求解过程中,需要进行网络形式构造,进行图割算法的优化。图割算法主要是将一幅图像中颜色、构造相同的区域与背景或其他部分进行区分的手段,经常被使用在识别、检测等工作中。优化之后的图割算法在实际图像中具体的应用过程如图1所示:

图1 优化后的图割算法分割过程示意图
图1中,图(1)为待分割图像,图(2)为通过图(1)所建立的带权无向图,图(3)为图(2)的最小割,图(4)表示最终的图割结果。至此完成视频数据图割算法的优化与应用。
1.2 短跑训练中手臂摆动姿态特征提取
在完成短跑运动员手臂摆动图像的分割后,需要从视频序列中定位手臂摆动姿态的特征,主要包括图像的形状以及纹理等高级的人体结构特征[13-14]。手臂摆动姿态是由谷歌位置决定,但短跑运动员的谷歌信息是通过景深数据所获得。使用Kinect体感摄影机能够提取出相应的体感信息,获取手臂中重要关节的图像。
为获取到手臂摆动姿态的特征参数,首先将手臂摆动的倾斜角度特征进行规范。以运动员的手臂和身体连接处作为中心,划分出不同角度的刻度线,相邻的刻度线之间的夹角设置为15度。因此,在短跑训练中运动员的手臂动作角度划分如图2所示:
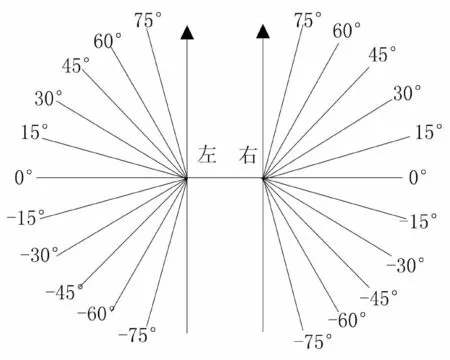
图2 短跑训练运动员手臂摆动角度示意图
如图2所示,在时域特性下对运动员的手臂摆动特征进行提取。特征参数主要包括均值、方差,利用以上的LBP数据特征,能够描述出视频数据图像的局部纹理,原始的数据特征主要是通过算子在矩阵窗口中进行定义。在规定阈值的过程中,参考模板中心的像素值,如果选择的中心像素点周围的像素值更大时,在外围点进行标记[15],设置为1,如果较小,则设置为0。在特征提取模板经过多次比较后,会随机生成若干个比较点,通过各个点的纹理信息进行图像特征的提取与识别。
1.3 基于深度卷积神经网络的手臂摆动姿态分类识别
为实现在视频数据中对每个短跑运动员的手臂摆动内容的完整性,在对短跑运动员手臂摆动姿态进行分类识别时,应用到的是深度卷积神经网络,将视频数据输入到网路中,运用级联方式将上述网络转变为多层深度卷积神经网络进行训练识别。在训练过程中,使用C-pose网络结构的关节定位算法,利用相同大小的矩阵来记录多各个手臂关节的坐标。C-pose网络结构共包含10层,主要神经网络层中包含卷积层、归一化层和完全连接层等。在以上多个神经层中,只有卷积层和完全连接层中设置有相关的训练参数。C-pose网络结构作为整体的模型,为进一步提高分类识别的精准性,将关节利用各种函数的映射关系进行描述,如式(4)所示:
(4)
式中,yi表示短跑运动员的手臂关节,bw表示矩形框的宽度,bh表示矩形框的高度,bc表示矩形框的中心。这三个值组合后能够表示短跑运动员的手臂在图像中的矩形区域。
针对上式进行需要编码的关节主要包括手臂、手肘、手腕,将其定义为姿态向量,单一的输入图像被符号标记为(x,y),x表示图像数据,y表示回归姿态向量。根据上述得到的信号均值等方差相关系数,利用深度卷积神经网络进行手臂摆动的姿态识别,将运动员在训练中的手臂特征向量参数进行输入,实现特征识别。
2 方法性能测试
2.1 测试过程设计
为了验证本设计的基于视频数据的短跑训练中手臂摆动姿态识别方法的有效性,在本章设计具体的实验,来验证不同识别方法的精确性。实验中,选择5名短跑运动员作为测试者。并令测试者在进行短跑训练过程穿戴含有光栅传感网络的装置,将测试者在短跑过程中的手臂摇摆姿态进行可视化,得到相关的视频数据。以各个测试者的左侧手臂作为研究对象进行测试,在测试之前对测试者的手臂数据进行测量。测量示意图如图3所示:

图3 测试者臂长参数测量示意图
图中,l1表示大臂长度,l2表示前臂长度,l3表示掌心距,测试者的测量结果如表1所示:
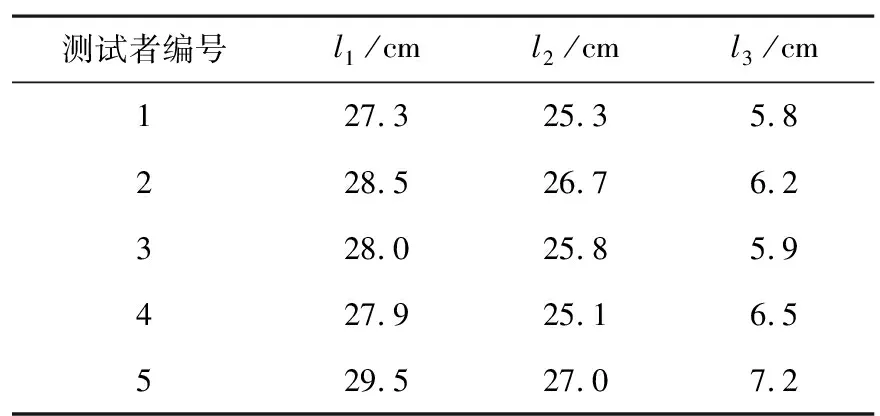
表1 测试者上肢参数
利用以上测试者在短跑训练中的视频数据作为集合,在准备工作完成之后,令各个测试者进行短跑训练,按照正确训练方法中手臂不同关节的角度摆出不同维度的姿态。并分别使用本文设计的基于视频数据的短跑训练中手臂摆动姿态识别方法和传统的基于传感器的识别方法对以上测试者在短跑训练中的手臂摆动姿态集合进行识别,并将识别结果进行汇总分析。
2.2 识别结果与分析
(1)有效性对比
在以上测试环境中,能够分别得到本文方法和传统方法下,对测试者的手臂摆动姿态的角度进行识别与测量。以手肘为目标点,得到的两种方法下某测试者的手肘识别轨迹与参考轨迹之间的对比如图4所示:

图4 某测试者手肘轨迹对比
从上图中测试者手肘轨迹对比可以看出,在两种手臂摆动姿态的识别方法中,本文方法下得到的手肘轨迹识别结果与实际的手肘移动轨迹更加吻合。为了精准对比两种方法的测量结果,将视频数据中的图像按照不同自由度进行分类,并以手肘为目标测量相对应的角度,得到的角度对应测量结果如表2所示:

表2 两种方法下手肘角度测量结果
从表2中的结果可以看出,无论是从整体的手肘运动轨迹,还是从五自由度各个角度进行测量,本文所提出基于视频数据的短跑训练中手臂摆动姿态识别方法的识别轨迹与实际情况更加吻合,各个自由度的角度测量值也更加接近实际值。这也验证了本文方法在短跑训练中的手臂摆动姿态识别中,具有良好的性能。
3 结 语
为提升短跑运动员手臂摆动动作的识别,通过视频数据作为短跑训练中手臂姿态识别的依据,从中获取运动员的上肢姿态动作信息,所得到的结果与仅通过传感器所获取到的数字相比,精准度更高。在识别的过程中,从手臂的各个自由度识别结果来看,本文方法都具有一定的优势。本文方法虽然取得了一定的研究成果,但是也仍然有不足之处,本文在识别过程中,仅考虑了关节运动以及其产生的应变量,运动过程中肌肉也会产生微小的变化,对其进行识别也具有非常大的研究意义。因此在下一阶段的工作中,可以从肌肉应变量入手进行分析与讨论,以提升方法的有效性。
猜你喜欢
发明与创新·中学生(2017年12期)2017-12-11
小朋友·快乐手工(2017年8期)2017-08-10
校园英语·下旬(2016年5期)2016-06-07
少儿科学周刊·少年版(2015年4期)2015-07-07
岁月(2015年3期)2015-04-03
环球时报(2014-10-08)2014-10-08
环球时报(2014-04-09)2014-04-09
视野(2013年5期)2013-08-15
娃娃画报(2009年11期)2009-12-07
母婴世界(2009年11期)2009-12-02