
头影测量标志点自动识别算法研究进展
2022-08-25 09:57赵从义姚旭峰
软件导刊 2022年8期
赵从义,姚旭峰
(1.上海理工大学健康科学与工程学院,上海 200082;2.上海健康医学院医学影像学院,上海 201308)
0 引言
头影测量分析(Cephalometric Analysis)是对人类头骨牙齿和骨骼关系分析的一种方法。牙医、正畸医生和口腔颌面外科医师经常将其用作辅助诊疗的工具[1]。头影测量分析被广泛用于口腔正畸临床诊断、矫治设计、疗效评价、头面部结构研究和儿童生长发育评估等方面[2]。头影测量分析需先从面部侧面拍摄X 光图像,然后标注出头部侧位X 射线图像中的解剖标志点,再测量和计算这些解剖标志点之间的角度、距离等,根据这些测量值分析与评估口腔解剖结构类型的异常,从而拟定治疗计划。在当代正畸诊断和治疗计划中,识别标志点是必不可少的步骤。
截至目前,基于头颅侧位片目测评估解剖标志点仍然是一项困难的任务,需要由受过专门培训的临床医生进行手动测量,但是手动测量过程经常导致测量误差[3]。这种人工测量十分耗时,口腔专家平均需要15~20min 用以处理每个单独的头颅侧位片[4]。由于头颅侧位片手动测量标志点经常出现误差且非常耗费时间,大量国内外学者开始研究全自动头影测量标志点识别方法,它将减轻常规临床服务的工作量,并为正畸医生节约更多时间以制定最佳治疗计划。
自20 世纪90 年代以来,越来越多的学者提出用于标志点定位识别的自动化框架方法,它们大致可分为以下几类:基于常规图像处理的方法、基于模板匹配及统计的方法、基于机器学习的方法以及基于深度学习的方法。目前,牙科临床依旧采用手动标注头影测量分析标志点,自动化识别方法并未应用到临床,这种情况迫切需要自动化技术应用到牙科临床。因此,本文对该领域相关研究进行了全面系统的回顾,主要介绍基于常规图像处理方法、模板匹配及统计学方法、机器学习以及深度学习的头影测量分析标志点自动识别算法进展,并对每种方法优缺点进行讨论。
1 基于常规图像处理方法的标志点识别算法
图像处理技术起源于20 世纪60 年代,图像处理技术主要包括图像增强、图像分割、图像边缘检测与提取等。标志点通常位于头颅边缘轮廓上,因此标志点的自动识别以及定位在最早期是采用基于图像处理技术的边缘检测算法实现。常规图像处理标志点自动识别算法性能由标志点的精度决定,标志点的精度描述为真实值和估计值之间的欧几里得距离平均误差加标准差。
如表1 所示,Levy-Mandel 等[5]是最早研究标志点自动识别算法的学者,其基本思想是模拟人工操作,在提取相关边缘后利用具有典型颅面结构形状先验知识的算法对检测到的线条按预定顺序进行跟踪。原始图像先用滤波算子进行处理,然后用边缘检测器进行处理。标志点的位置是由基于一组预定义的线、交叉点和外部边界的几何特性确定。在此基础上,Parthasarathy 等[6]通过加入分辨率金字塔缩短识别时间,该算法在较小尺寸、较低分辨率的图像上定位感兴趣的特征,在5 张X 射线图像上进行测试,能够以2 mm 的精度定位9 个标志点中的4 个。Tong 等[7]改进了Parthasarathy 的工作,引入分辨率金字塔,对图像进行中值滤波,并去除噪声。在对图像应用边缘增强算子后,跟踪颌骨和前脸的骨骼轮廓,采用阈值化和边缘增强相结合的方法提取人脸正面的肤色轮廓,然后利用这些信息确定标志点的位置。Tong 等[7]将标志点的数量增加到26 个,对5 幅图像的实验表明,40%的标志点误差在1 mm以内,70%的标志点误差在2 mm 以内,95%的标志点误差在5 mm 以内。通过以上常规图像处理方法比较,在边缘检测后加入分辨率金字塔提高了标志点检测精度及数量,原因是提取到了更多的底层特征。
Davis等[8]在黑板框架中开发了一个回忆算法,利用黑板体系结构和模型的集成系统中的多个知识源,黑板和任务控制模块允许特定的基于知识的模块对黑板上的可用信息进行标志点定位。该算法定位了19 个标志点,在10张X 射线图像上对该算法进行了测试,最终结果显示,63%的标志点误差在1mm 以内,70%的标志点误差在2mm以内。Ren 等[9]提取了嵌入先验知识的颅骨轮廓,根据X线头影测量照片中灰度和特征点的分布情况,采用基于多层次知识的图像层方法。在有10 个样本的实验中,有24个点被定位,误差在1 mm 以内,其中19 个点误差在0.5 mm 以内。He 等[10]首先采用中值滤波去除噪声,随后采用图像阈值进行轮廓提取,最后采用区域生长与曲线拟合进行标志点定位。对10 张X 射线图像进行测试,最终确定20 个标志点,50%的标志点在1 mm 范围内。以上方法通过先验知识得到相应模型,再根据模型得到标志点位置,提高了标志点检测数量及精度,为后续模板匹配及统计学方法运用打下了基础。

Table 1 Summary of common image processing methods for automatic identification of landmarks表1 标志点自动识别常规图像处理方法汇总
常规图像处理方法的优势在于并不需要很多数据量,但是缺点也很明显,常规图像处理方法识别的标志点不多,并且需要通过牙科医生及学者的先验知识,提取关于标志点位置的轮廓,并基于先验知识识别标志点,但是这些方法并不可靠,因为它们的性能与输入图像的质量有很大关系,并且找不到一些不在任何特征轮廓上的标志点,因此常规图像处理方法不适用于牙科临床。
2 基于模板匹配及统计方法的标志点识别算法
在20 世纪90 年代初期,基于图像处理方法产生的问题模板匹配及统计学方法引起了学者的关注。通过训练出的模板,可以快速定位到标志点所在区域,再通过统计学方法识别出标志点位置。
常规图像处理方法之后,模板匹配技术首次应用于标志点识别。如表2所示,Cardillo 等[12]使用数学建模减少标志点的搜索区域,然后应用基于数学形态学的模板匹配技术确定标志点的确切位置。该算法在40 幅X 射线图像上进行了测试,并定位了20 个标志点,85%的标志点精度在2 mm 之内,5%的标志点精度在2~5 mm 之间,10%的标志点精度在5 mm 以外。Rudolph 等[13]利用空间光谱学知识建立统计灰色模型,该模型识别了15 个标志点,所识别标志点平均误差在3.1 mm 以内。主动形状模型(Active shape models,ASM)[14]首先在Hutton 等[15]的研究中被用作标志点检测,该算法在63 张图像上进行了测试,识别了16个标志点,13%的标志点精度位于1 mm 以内,35%的标志点精度位于2 mm 以内,74%的标志点精度位于5 mm 以内。ASM 的应用大幅度提高了标志点识别精度,可以看出良好的模型能极大提高标志点检测精度。
模板匹配技术非常依赖模型,随后模板匹配技术与统计学的组合方法被提出,Romaniuk 等[16-17]使用线性和非线性模型定位标志点,通过3 种统计方法进行估计:刚性配准、基于主成成分分析(Principal Component Analysis,PCA)的线性方法和基于核PCA 的非线性模型。最佳方法的平均误差为3.3 mm,精度也很高。在诊断中,正畸医生通常会追踪颅面结构以进行分析,但是对于某些梯度较低或反转的局部配置,单纯使用图像处理技术不可避免地会失败。Romaniuk 等[18]提出一种类型最短路径的区域方法,以结合鲁棒性和较低的算法成本解决这些问题,但他的方法只能提取颅外轮廓。Yue 等[19]提出一种基于主成分分析的灰度图像块形状模型的组合模型,在模型训练中,选取12 个标志点作为参考点,根据解剖学知识将每个训练形状划分为10 个区域,利用主成分分析表征区域形状变化和每个特征点的统计灰度轮廓。在输入图像上定位特征点是一个被分为两个阶段的过程,首先通过图像处理和模式匹配技术识别参考标志点,对输入图像进行形状分割,然后针对每个区域利用改进的主动形状模型对其特征点进行定位。根据先验知识将定位的点与细分曲线连接起来,就可以勾画出所有的颅面解剖结构,允许用户以多种不同的交互方式修改结果。该模型对12 个解剖标志点进行检测,在2 mm 和4 mm 范围内的标志点检测成功率分别为71%和88%。Romaniuk[18]和Yue[19]都采用了组合方法,但Yue 提出的方法精度更高,区别在于前者只采用了简单的线性与非线性模型,虽然统计学方法提高了精度,但组合方法也非常依赖模板模型以提高精度。
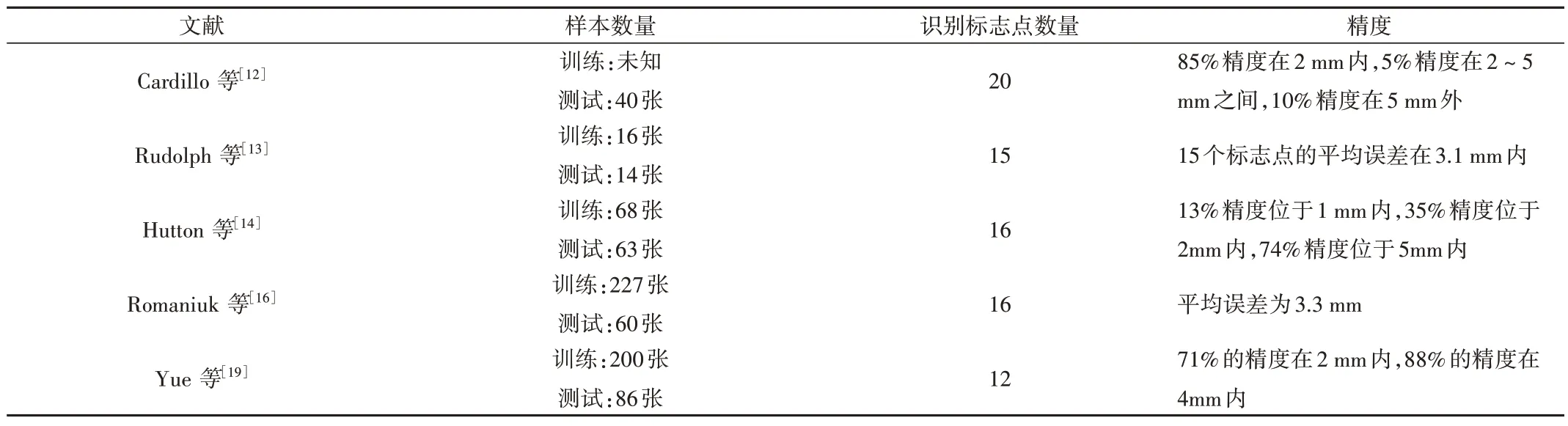
Table 2 Summary of statistical template methods for automatic identification of landmarks表2 标志点自动识别统计模板方法汇总
可以看出,虽然模板匹配方法加上统计学的方法使标志点识别精度大幅提高,基于模型的方法产生的模型可以检测最可能的区域,组合方法考虑了主动形状外观模型并且通过与模板匹配相结合以细化头影测量标志点,但是很难选择有代表性的模板或形状,并且不能很好地适应单个标志点的噪声和可变性。实际牙科临床中,并不能通过一套固定的模板匹配方法及统计学方法识别不同患者的头影测量标志点,不能很好地应用于临床。
3 基于机器学习方法的标志点识别算法
近年来,利用机器学习方法在射线图像中自动检测标志点方面取得了重大进展[20-23]。2014 年与2015 年国际生物医学影像国际研讨会举办了两届自动头影测量X 射线标志点检测挑战赛,许多学者提出了基于机器学习方法的标志点检测方法。如表3 所示,基于稳健和准确的形状模型匹配结果使用随机森林为每个标志点的位置投票,然后使用统计形状模型规范所有标志点的投票,进而识别标志点的位置,这使得标志点识别精度大幅提升。头影测量挑战赛中,评估算法性能的方法被提出,主要评估标准被称为成功检测率(Success Detection Rate,SDR)[24]。SDR 是从标志点实际位置一定范围内的预测标志点数量比率。
Ibragimov 等[25]开发了一种框架,利用类Haar 特征描述每个标志点的强度外观,并应用随机森林理论将这些特征组合成标志点候选点检测器,将具有最大探测器响应的图像像素作为标志点候选点。为了选择最佳候选点,该框架依赖于标志点之间的空间关系,通过高斯核密度估计建模并通过基于最优分配的形状表示找到最具代表性的标志点。在100 张头影测量图像上训练该框架后,在测试集100 张图像上进行了验证,2 mm 以内检测成功率为72.7%,4mm 以内检测成功率87.68%。Chu 等[26]建立了一种基于随机森林回归的全自动二维头影X 线片标志点检测算法。其算法包括两个阶段:标志点检测阶段和标志点修改阶段。为了修正未被正确检测到的标志点位置,建立了稀疏形状合成模型。标志点检测阶段可进一步分为两个步骤:基于X 射线图的标志点检测器训练步骤和标志点预测步骤。首先为每个标志点训练一个单独的基于X 射线图的标志点检测器,确定标志点位置后进一步添加先前形状约束以修改标志点位置。对100 幅测试的头影测量图像的验证表明,该方法在100张测试数据集上2 mm 以内检测成功率为39.7%,4 mm 范围内检测成功率为77.79%。Chen等[27]提出一种通过数据驱动的图像位移估计全自动标志点检测方法,在训练中随机抽样了真实标志点位置周围的一组正方形图像斑块,这些斑块的视觉特征和对标志点的位移构成了训练数据。采用一种数据驱动的方法对每个斑块标志点位置进行投票,将每一张选票视为一个小的高斯分布,并将它们聚合到一个概率图中,概率图的分布对应检测到的标志点位置。该算法在100 张测试数据集上2 mm 以内检测成功率为43.8%,4 mm 范围内检测成功率为78.42%。Mirzaian 等[28]提出一种基于随机决策森林全局最优图形结构的方法,该方法有两个阶段:训练阶段和测试阶段。在训练阶段从一组以标志点位置为中心的窗口中提取上述特征作为真正样本,从一组不靠近标志点位置随机选择的窗口中提取上述特征作为真负样本。对于新图像,采用图片结构算法对公式中的代价函数进行全局优化,将最小生成树应用于19 个标志点,并将权重设置为协方差值以解决标志点自动识别问题。在100 张测试数据集上,2 mm 以内检测成功率为58.2%,4 mm 范围内检测成功率为80.68%。Vandaele 等[29]将问题处理为19 个独立的二值像素分类问题。标志点由16 × 16 的图像块表示,并以6 种不同的分辨率提取。随后使用随机森林作为像素分类器,在距标志点最多4 mm 的半径内随机提取训练像素。在预测阶段,预测从标志点可能分布中提取的多个像素位置的类别,然后返回被分类为正值且置信度最高的像素的中值位置作为最终标志点位置。该方法在100 张测试数据集上2 mm 以内检测成功率为70.26%,4 mm 范围内检测成功率为88.53%。Ibragimov 等[25]采用类Haar 特征可以更好地得到底层特征,通过以上机器学习方法的对比可以看出Ibragimov 等[25]的框架优于其他竞争对手的关键区别在于形状模型,形状模型的使用使得其识别精度更高。以上为2014 年挑战赛提出的算法,可以看出在4 mm 范围内检测成功率较高,但是在2 mm 以内的检测成功率并不高,难以应用于临床。
在2015年的挑战赛中,更高精度的算法被提出。2015年挑战赛冠军算法由Lindner 等[30]提出,该算法基于约束局部模型框架中随机森林回归投票的全自动标志点检测系统。在训练阶段对每个标志点训练一个随机森林回归器,每个图像都用感兴趣对象上的标志点名称进行注释。捕获对象所有标志点的图像区域被重新采样到标准化参考帧中。对于每个标志点的斑块进行采样,并在与参考帧中的真实位置相差较大的一组随机位移处提取特征。训练一个回归随机森林函数预测标志点最可能位置,每个树存储到达该树所有训练样本位移的平均偏移量和标准差,对于排列形状,运用PCA 基于图像集合中的标志点训练统计形状模型。在检测阶段,给定对象姿态的初始估计,图像的感兴趣区域被重新采样到参考帧中,然后在特定范围内搜索每个估计的标志点位置周围区域并提取每个位置的相关特征值。这些参数将用于随机森林回归器投票选出累加器数组中的最佳位置,在累加器数组中,每棵树都将独立投票以预测标志点位置。最终在150 张测试数据集下,在2 mm 精度范围内,平均误差为1.6~1.7 mm,检测成功率为75%~85%。机器学习的标志点识别大都采用随机森林方法预测标志点位置,但精度大幅依赖于统计形状模型,从Ibragimov[25]与Lindner[30]的比较可以看出,采用的约束局部模型可以更好地适应标志点检测任务。

Table 3 Summary of machine learning methods for automatic identification of landmarks表3 标志点自动识别机器学习方法汇总
可以看出,基于机器学习方法的标志点自动识别精度大幅提高,2 mm 范围内的检测成功率达到75%以上,而且提高了形状的可变性和抗噪性。但是机器学习方法需要大量的头颅侧位片才能提高准确性,且通过机器学习方法的比较可以看出,机器学习方法对形状模型要求很高,良好的形状模型才能带来更高的识别精度,并且机器学习方法在实际应用中,识别性能不好,并不能用于牙科临床。
4 基于深度学习方法的标志点识别算法
深度学习技术是一种分层结构模型,可以从原始图像中提取独特的特征,从而使端到端模型具有灵活性和健壮性。这些模型将显著信息传播到顺序卷积层,同时探索它们之间的空间关系。目标检测是计算机视觉领域的基本任务之一,学术界对其已有近20 年的研究历史。近年来,随着深度学习技术的发展,目标检测算法也从基于手工特征的传统算法转向了基于深度神经网络的检测技术。从卷积神经网络(Convolutional Neural Network,CNN)到基于卷积神经网络的特征区域方法(Regions with CNN Features,RCNN),到基于快速卷积神经网络的特征区域方法(Fast/Faster Regions with CNN Features,Fast/Faster RCNN)、你只看一次方法(You-Only-Look-Once,YOLO)和单次多框检测方法(Single Shot Multibox Detector,SSD)系列,这些算法在开放目标检测数据集上的检测效果和性能都很出色。
最先将卷积神经网络用于医学影像多标志点定位的是Payer[31],探讨了CNN 在医学图像数据多标志点定位中的适用性,它有效地结合了精确的局部外观和解剖标志点位置。基于深度学习的标志点定位算法中主要分为一阶段检测方法与两阶段检测方法,一阶段检测方法是基于图像直接得到标志点位置,两阶段方法通常是先得到标志点所在区域,随后在区域内通过回归网络得到标志点位置。
如表4 所示,一阶段算法中,Arik 等[32]首次研究了CNN 在全自动头影测量中的应用。该框架利用CNN 检测描述患者解剖结构的标志点,并对颌骨和颅底区域的病理进行定量评估并且使用了公开数据集以训练CNN 模型。该算法首先在训练阶段为每个标志点选取81×81 的像素块,经过卷积神经网络输出1×1 的像素,最终输出的1×1 像素为标志点位置。最终识别了19 个标志点,在250 张测试集的测试中,2 mm 内的检测成功率达75.37%,4 mm 以内的检测成功率达88.25%。Goutham 等[33]提出一种改进的U-Net网络用来检测标志点位置。该算法以分割图作为训练图像的标签,分割图是具有相同大小训练图像的二值掩模并使用公开数据集加以训练,该算法识别了7 个标志点,2 mm 范围内的检测成功率为65.1%,4 mm 内的检测成功率为84.6%。虽然识别精度并不高,却是首次使用分割网络进行标志点识别。对7 个标志点构建7 个分割网络,由于每个标志点单独进行识别,标志点检测复杂,极大提高了计算成本,后续可采用多类分割网络进行识别。Qian等[34]提出第一种更快速的基于R-CNN 的头影测量标志点检测方法CephaNet。在CephaNet 中设计一种多任务丢失机制以减少类内差异,并采用多尺度训练策略提高小标志点的检测准确率。为了去除异常检测到的标志点,提出一种两阶段修复策略。首先根据训练数据中标志点的分布构造二维无向图,然后采用最大置信度和拉普拉斯变换去除异常标志点。该方法识别了19 个标志点,CephaNet 在数据2 mm、3 mm、4 mm 范围内的检测准确率分别为82.5%、89.3%和90.6%。Park 等[35]对两种最新的自动识别头影测量标志点的深度学习算法进行准确性和计算效率比较。共选择1 028 张头影测量图像分别训练YOLOv3 和SSD 模型,目标标记数量为80 个标志点。在训练之后,使用283 幅图像组成的测试数据集对算法进行测试。YOLOv3算法在80个标志点中的38个准确度上优于SSD,YOLOv3 的误差曲线图不仅误差范围较小,而且有更各向同性的趋势。YOLOv3 和SSD 的平均每张图像计算时间分别为0.05s 和2.89s。最终得出YOLOv3 似乎更有希望成为临床上使用的全自动头影测量标志物识别系统。同时,公布了公开数据集19 个标志点的精度,YOLOv3 在2 mm 范围内的成功检测率为80.4%,4 mm 范围内的检测成功率为96.2%。YOLOV3 与SSD 都是一阶段检测算法中精度较高的算法,但是YOLOV3 在标志点检测精度要优于SSD,不仅仅是因为YOLO V3 引入特征金字塔(Feature Pyramid Networks,FCN)结构,同时其检测层由三级特征层融合,而SSD 的6 个特征金字塔层全部来自于FCN 的最后一层,其实也是一级特征再做细化,一级特征图的特征容量明显弱于三级,尤其是浅层包含的大量小物体特征,而标志点恰好为小物体目标。
两阶段算法中,Nishimoto 等[36]展示了CNN 回归框架通过互联网采集的X 射线片中检测头影测量标志点的方法。首先利用图片抓取软件在互联网上抓取X 射线片,选取了219 张X 射线图,其中153 张为训练集,66 张为测试集,其次构建具有4 层卷积层和4 层稠密层的回归神经网络进行训练,并用每个坐标值的平均绝对误差进行评估。随后将以标志点为中心的图像块放进神经网络进行标志点预测。该算法识别了10 个标志点,由于互联网搜集的图片无固定像素,不能得到标志点识别实际误差。Lee等[37]提出一种基于深度神经网络的头影测量标志点识别模型。从935 张头颅侧位片中裁剪出多尺度图像块,训练两种神经网络,斑块分类和点估计模型。提出的模型识别了22 个硬组织标志物和11 个软组织标志物。在测试时,该算法识别每张X 射线片用时0.7s,该模型识别硬组织标志的误差范围为1.32~3.5mm,平均成功率为96.4%;识别软组织标志的误差范围为1.16~4.37mm,平均成功率为75.2%。从该算法可以看出,深度学习对硬组织标志点的识别精度要远高于软组织标志点,硬组织标志点特征比软组织特征更容易提取以及辨别。Lee 等[38]开发一种新的框架,利用贝叶斯卷积神经网络(Bayes Convolutional Neural Network,BCNN)定位具有置信度区域的头影测量标志点,并采用公开数据集训练模型。整个算法由感兴趣区域提取和考虑不确定性的标志点估计两部分组成。在2 mm和4 mm 范围内,该框架的平均标志性误差为1.53 ± 1.74 mm,检测成 功率分别为82.11% 和95.95%。Lee[37]与Lee[38]的区别在于后者在提取完感性区域后使用BCNN 在感性区域内进行标志点预测,前者只是采用CNN 进行预测,而后者采用一种后处理方法:采用分数加权法分辨具有较高贝叶斯均值和较低不确定性的像素,故后者误差更小、精度更高。Zeng 等[39]提出一种基于级联三级卷积神经网络(Three-stage Convolutional Neural Networks,TCNN)的头影测量标志点自动预测方法。在第一阶段,通过提取颅面结构的高层特征定位侧面人脸区域,以帮助克服外观变化,再对对齐的人脸区域进行处理,以同时估计所有标志点的位置。在最后阶段,利用初始位置周围的高分辨率图像数据,通过专用网络对每个标志点进行细化,以获得更准确的结果。最终在公开测试集的精度为:2 mm 范围内78.62%,4 mm 范围内95.58%。Zeng[39]将识别问题从两阶段增加到三阶段,但精度并不高,虽然增加了总体感性区域的提取,但对最后精度提高并没有实质性帮助,未来可以在第三阶段改进网络,加入FPN 以提取更多底层特征并进行融合。

Table 4 Summary of deep learning methods for automatic identification of landmarks表4 标志点自动识别深度学习方法汇总
深度学习方法逐渐应用于正畸领域,采用深度学习可以大幅提高标志点精度和检测速度,2mm 范围内检测成功率已达80%以上,完全可以媲美牙科医生,而且识别标志点的速度大幅提高,由原来的15~20min 提高到目前的0.5 s 左右,极大提高了牙科医生的工作效率,完全可以部署到牙科临床。但不可忽视的是,深度学习方法在训练时需要大量数据。Moon 等[40]为了确定开发能够自动识别头影测量标志点的人工智能所需的最佳学习数据量,共收集2 400 张X 射线片,每张头X 射线片包含80 个标志点。其中,2 200 幅图像用作深度学习模型训练,剩余200 幅图像用作测试。训练的数据量包括24 种组合,通过不替换的随机抽样方法选择训练数据。结果表明,随着学习数据集数量的增加,深度学习模型准确率呈线性增长。为了估计最优训练数据量,建立一种预测模型,最终得出至少需2 300组学习数据才能开发出精度较高的深度学习模型。
5 结语
常规图像处理方法通常提取关于标志点位置的轮廓,并基于先验知识识别标志点,性能高度依赖于图像质量,而且找不到一些不在任何特征轮廓上的标志点。基于模板匹配的方法所产生的模型可以检测标志点出现的区域,考虑了主动形状外观,通过结合统计学方法优化头影测量标志点的精度,但是很难选择有代表性的模板或形状,并且不能很好地应对个体的噪声和可变性。基于机器学习的方法,如神经网络和支持向量机,提高了形状的可变性和抗噪性。然而,这些方法需要大量的头颅侧位片才能提高准确性,在实际应用中,识别性能也不太令人满意。深度学习方法大幅提高了头影测量分析标志点的识别精度,并且提高了识别速度,这使得头影测量分析标志点自动识别技术应用到临床成为一种可能,但是需要大量的训练数据。总而言之,从图像处理技术到模板匹配及统计学方法,机器学习方法到深度学习方法,标志点的检测技术不再受制于图像质量,标志点检测精度大幅提高,检测时间也大幅减少,使得测量标志点自动识别技术部署到牙科临床成为可能。
近年来,随着深度学习技术的出现及发展,标志点识别精度大幅提高,将深度学习应用于临床已经成为可能,但训练样本数量制约着深度学习发展。同时,标志点作为小目标物体,检测算法并不能很好地检测出小目标,未来发展方向是面向小数据集基于深度学习的小目标物体识别方法,无需大量的头颅侧位片,基于小数据集得到精度更高的头影测量标志点识别模型。近年来,伴随着诊断成像、三位重建及三维检测的发展,三维头影测量标志点识别成为最新发展方向。
猜你喜欢
口腔医学(2021年8期)2021-09-16
医学教育研究与实践(2019年5期)2019-10-15
测控技术(2018年12期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
电子制作(2018年11期)2018-08-04
测绘科学与工程(2016年5期)2016-04-17
电子设计工程(2015年3期)2015-02-27
计算机工程与设计(2014年9期)2014-12-23
河南科技(2014年14期)2014-02-27
电子与信息学报(2012年2期)2012-04-29
