基于模糊控制的高峰时段过饱和交通流配时方法*
2022-08-26 09:39汪奇锋张明萱
计算机与数字工程 2022年7期
聂 雷 汪奇锋 张明萱
(1.武汉科技大学计算机科学与技术学院 武汉 430065)
(2.智能信息处理与实时工业系统湖北省重点实验室 武汉 430065)
1 引言
近年来我国城市交通拥堵情况日益严重,特别在早晚交通高峰时段容易出现车流的通行需求量超出交叉口饱和通行能力的过饱和现象,严重时甚至引发大面积的交通瘫痪。交叉口处的信号控制是缓解交通拥堵最经济、有效的一种方法[1~2],有必要研究和设计面向过饱和交通流的信号控制方法来解决日趋严峻的交通拥堵问题。
目前,绝大部分的信号配时研究方法均面向非饱和交通流展开,其主要缺陷在于未区分过饱和与非饱和信号相位,导致过饱和信号相位未被分配足够的绿灯通行时间,同时非饱和信号相位的绿灯时间利用率较低。针对上述问题,提出了一种基于模糊控制的过饱和交通流配时方法FCTO。该方法首先基于车与基础设施(Vehicle to Infrastructure,V2I)通信实时收集交叉口处的车流信息,从而判断当前信号相位是否处于过饱和状态;当处于非饱和状态时交通信号控制系统执行传统的Webster配时法[3],否则采用基于模糊控制的配时方法来应对过饱和的交通流。基于模糊控制的配时方法的具体流程为:首先基于改进的Webster 配时模型计算一个合理的信号周期长度,接着基于模糊控制确定各相位的绿延时间,最后结合原有绿灯时间和绿延时间为各相位分配最终的绿灯时间。实验结果验证了所提FCTO方法在过饱和交通流情况下的有效性。
2 相关工作
交通流信息是信号控制方法实施的基础,目前有多种收集交通流信息的方式,例如文献[4]使用高清摄像头对交叉口处的车流进行实时监测,文献[5]借助传感器技术实现对车辆的感知与信息的收集,文献[6]利用车与车(Vehicle to Vehicle,V2V)和V2I 通信技术实现更加准确和细粒度的车辆信息收集。
在获取交通流信息后,交通控制系统通常基于各种算法或技术来优化当前的信号配时方案。文献[7]分别基于微生物遗传算法和模拟退火算法优化了SCATS 系统[8]的定时控制方案。文献[9]使用多智能体系统建模交通网络,并提出了一种基于迁移学习的交通信号控制方法。文献[10]分析了强化学习在交通信号控制中的可行性,提出了基于Q-learning的自适应交通信号控制方法来应对动态的交通环境。文献[11]提出了一种自适应的生物启发神经网络算法,其依据交通系统的实时状态来动态改变信号相位。然而上述方法在确定配时方案时通常需要进行大量的迭代计算,存在学习收敛速度较慢的问题。
近年来,模糊控制理论已被应用于交通信号控制方法中。文献[12]设计了一个能提供公平、优先和紧急三种运行模式的智能交通控制系统,其基于模糊推理选择当前交通情形下最恰当的运行模式,并利用深度强化学习实现信号相位的切换。文献[13]针对城市干线交通提出了一种基于二型模糊逻辑的信号控制方法,分别实现对单交叉口绿灯时间的分配和多交叉口之间绿灯时间的协调,从而有效保证干线的交通效率。文献[14]提出了一种基于两级模糊控制器的信号配时方案,该控制器首先确定信号相位,然后再调整绿灯时间,达到了减少车辆延误的目的。
由于目前绝大部分交通信号控制的相关研究都面向非饱和的交通流,当上述研究方法面对过饱和交通流时,其控制效果往往不太理想。因此,提出了一种基于模糊控制的交通流配时方法来应对高峰时段的过饱和交通流。
3 相关模型与假设
3.1 系统模型
本文研究单个交叉口在过饱和交通流条件下的信号配时优化方法。基于前期研究基础[15~16]建立基于V2I 通信的城市交叉口系统模型如图1 所示。
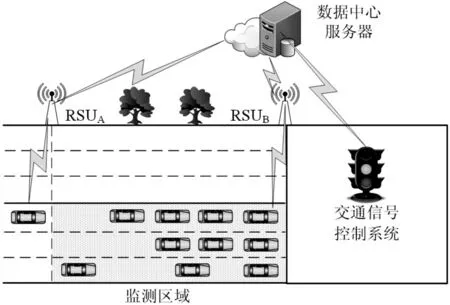
图1 系统模型
系统模型满足以下假设条件:
1)车辆行驶在双向六车道的城市道路上,左转、直行和右转车辆分别位于不同的车道,且右转车辆不受交通信号灯的约束;
2)车辆基于车载单元(On-Board Unit,OBU)与路侧单元(Road Side Unit,RSU)进行信息交互;
3)交通信号控制系统根据RSU 收集的交通数据执行自适应的信号配时方法;
4)不考虑非机动车辆和行人的影响,不考虑交通事故的发生。
3.2 信号相位模型
如图2 所示,本文选取城市交通场景中一种常见的四信号相位模型,图中带箭头的实线代表当前可通行交通流。
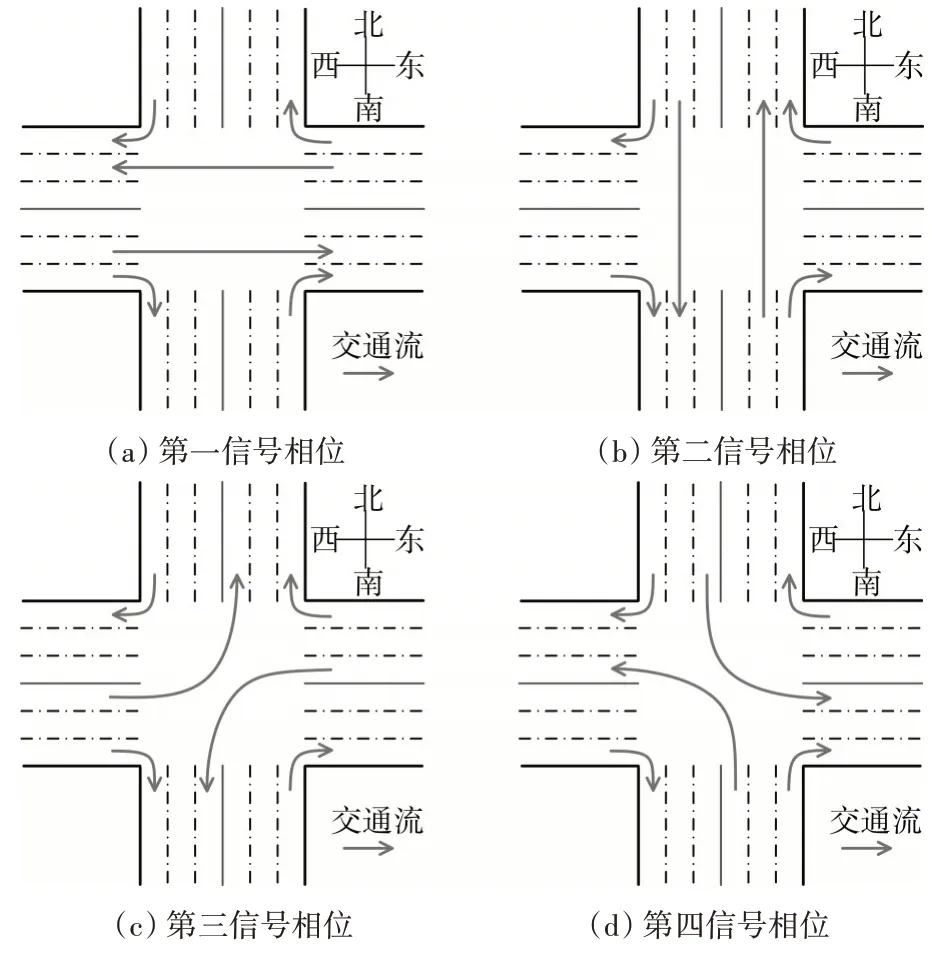
图2 信号相位模型
4 方法详细设计
4.1 基本思想
本文设计一种基于模糊控制的交通信号配时方法FCTO 来缓解过饱和交通流带来的通行压力,该方法由判断过饱和状态、计算初始信号周期、计算绿延时间和执行信号分配方案4 个阶段组成,其主要流程如图3所示。
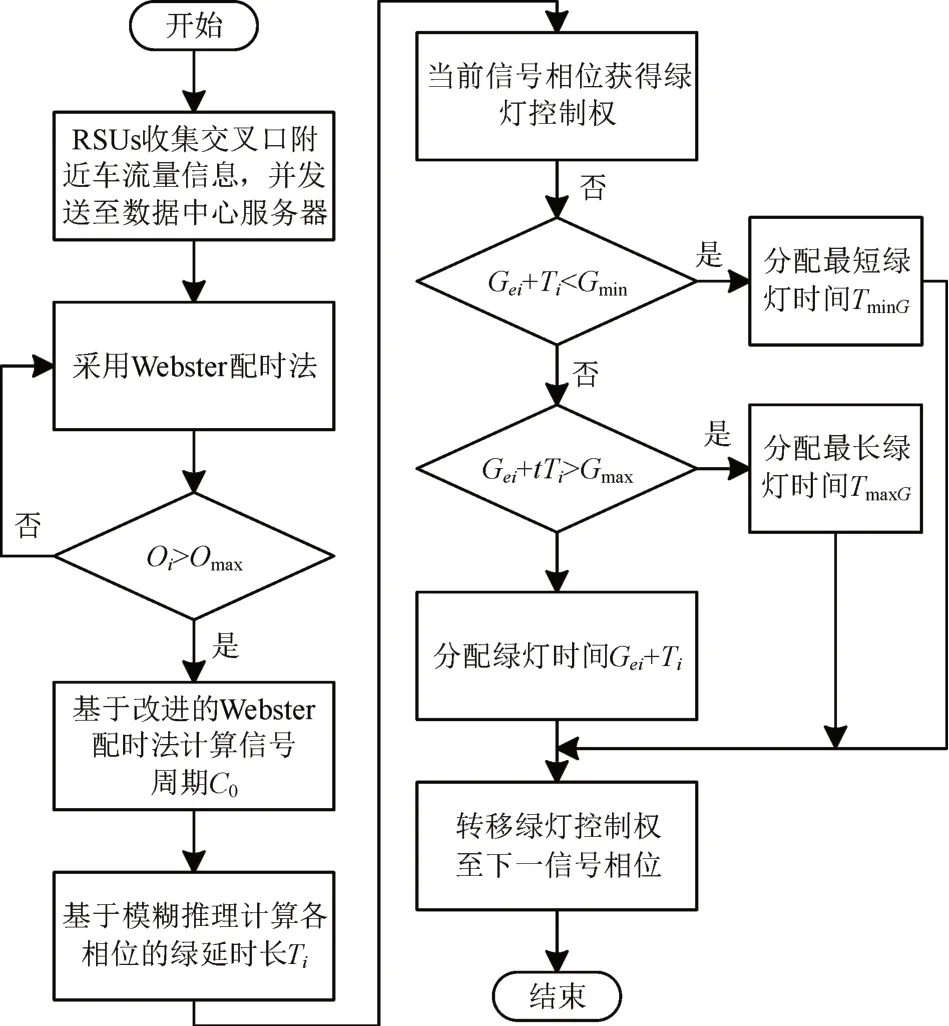
图3 FCTO方法的主要流程
4.2 FCTO方法的具体实现
4.2.1 判断过饱和状态
本文将各信号相位的临界车道车流量情况作为判断过饱和状态的重要依据。当车辆i 进入图1所示的监测区域时向路侧单元RSUA发送到达消息Ma,i,当该车辆驶出监测区域时向路侧单元RSUB发送离开消息Mb,i。到达消息中包含车辆的标识符IDi、行驶速度speedi、车辆长度lengthi、行驶车道lanei、车辆类型typei和时间戳timei,离开消息中包含车辆的标识符IDi。路侧单元实时收集相关数据并计算各车道的车流量情况,相关结果将上传至交通信号控制系统。
交叉口的饱和度O 主要由各相位临界车道的车辆密度和车辆平均速度所决定。令图2 中的四个信号相位分别为P1、P2、P3和P4,对于信号相位Pi(1 ≤i≤4)而言,假设其对应的左、中、右三个车道中车辆的数量分别为Nl,i、Nm,i和Nr,i,分别计算各车道的车辆密度和车辆平均速度。以第一相位的左车道为例,其车辆密度ρl,1和车辆平均速度vl,1的计算分别如式(1)和(2)所示:
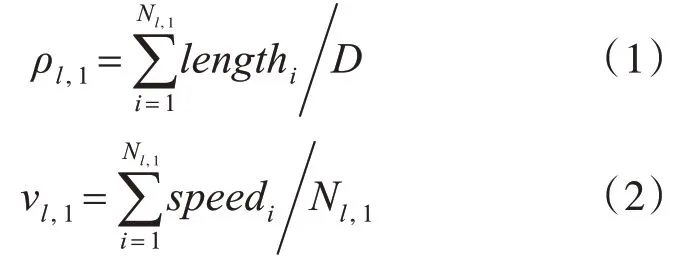
其中,D表示监测区域的长度。
根据式(1)和(2)计算第一相位左车道的饱和度Ol,i:

饱和度与车辆密度成正比,与车辆平均速度成反比,可以较好地反映交通拥堵程度。设置该车道的饱和度阈值Omax,若Ol,i大于Omax,则表明当前车道过于拥堵。同理得到其他各车道的饱和度,并依此与各车道的饱和度阈值进行比较。当交叉口某一信号相位至少有一车道的饱和度大于饱和度阈值时,记该交叉口处于过饱和状态,亟需通过优化的信号配时方法消除过饱和现象带来的负面影响。
4.2.2 计算初始信号周期
本节基于Webster配时法提出一种改进的信号周期计算方法,其在过饱和交通流状态下也能设置较为合理的信号周期长度C0,如式(4)所示:

其中,L 是总损失时间,Y 是交叉口各相位临界车道的流量比之和,α是调整系数。L和Y的计算分别如式(5)和(6)所示:


其中,li为第i 相位的损失时间,Tall-red为全红时间,yi为第i相位临界车道的流量比。
yi的计算如式(7)所示:

其中,qi为第i相位临界车道的车流量,Si为第i相位进口车道的饱和流量。
4.2.3 计算绿延时间
本节基于模糊控制来计算各相位绿延时间,其目标是:在满足绿灯时间约束的情况下,找出各个信号相位的最优绿延时间Ti(1 ≤i≤4),从而在过饱和交通流情况下提高交叉口的通行效率。本文采用双输入单输出的模糊控制器,输入变量1 为当前相位各车道的平均车流量Q1,i,输入变量2 为下一个相位的平均车流量Q2,i,输出结果为当前相位的绿延时间Ti。为方便后续的描述,将输入变量1和输入变量2简称为Q1和Q2,将输出结果简称为T。
1)模糊化
将Q1、Q2均取5 个模糊变量,其模糊变量值集合记为{VF,F,M,E,VE},其中VF 表示“很少”,F表示“少”,M 表示“中等”,E 表示“多”,VE 表示“很多”,同时设置其论域为{200,300,400,500,600,700,800};将绿延时间T 同样取5 个模糊变量,其模糊变量值集合为{VS,S,M,L,VL},其中VS表示“很短”,S 表示“短”,M 表示“中等”,L 表示“长”,VL表示“很长”,同时设置其论域为{0,1,2,3,4,5,6,7,8,9,10,11,12}。
如图4 所示,输入变量Q1、Q2采用梯形隶属函数,输出变量T采用三角形隶属函数。
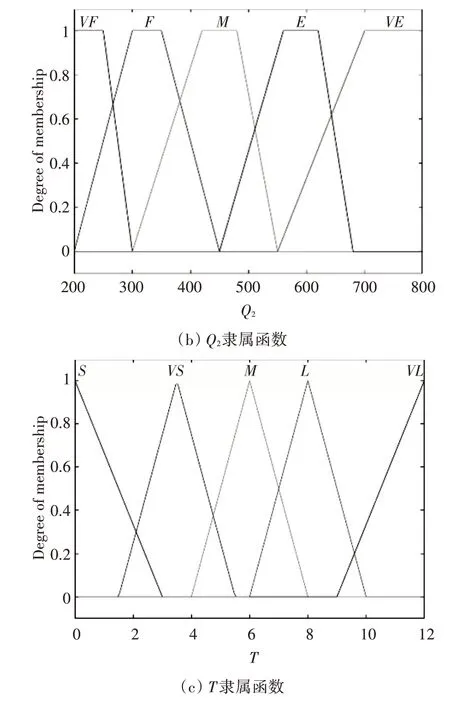
图4 输入和输出隶属函数
2)模糊规则
模糊规则的合理性及其数量直接影响模糊控制器的性能。通过总结知识库与数据库的经验,建立如表1所示的模糊规则表。
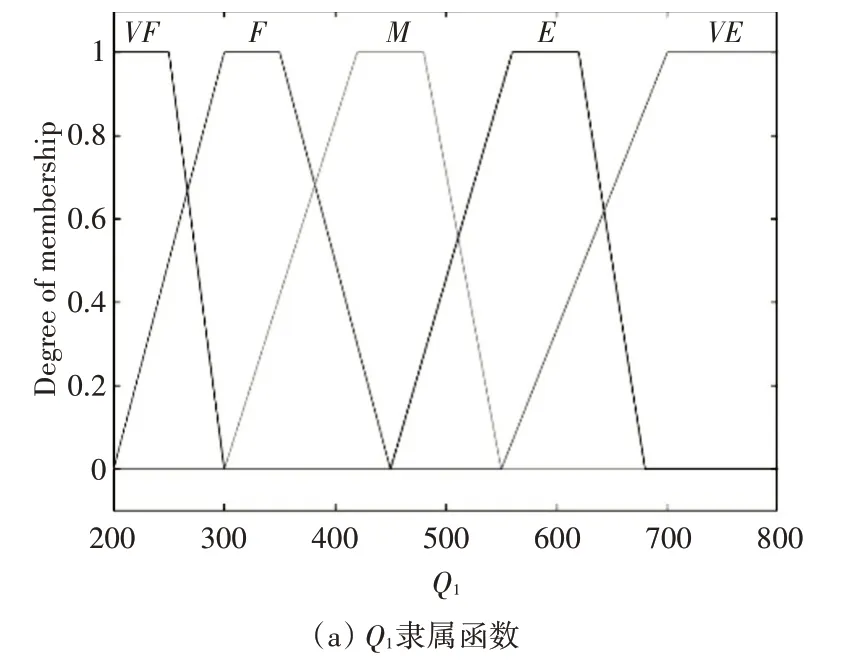
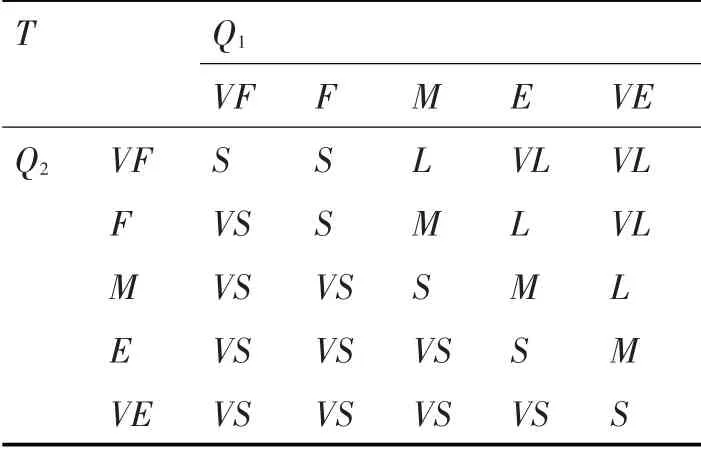
表1 模糊规则
3)模糊推理及去模糊化
由于采用双输入单输出的模糊控制器,所以将模糊规则设定为“IF A and B THEN C”,从而完成给定输入到输出的映射。根据Q1和Q2的输入值采用Mamdani方法进行模糊推理。例如模糊规则“如果Q1为VE 并且Q2为VF,则T 为VL”,其表明此时当前相位的车流量很多,下一相位的车流量较稀疏,则输出的当前相位绿延很长。
在实际模糊控制过程中,由于绿延时间需要具体的输出值,因此需要对系统输出变量绿延时间T进行反模糊操作。采用Matlab 提供的面积重心法实现去模糊化操作,将输出转换为具体的绿延时间数值T′,如式(8)所示。

4.2.4 执行信号配时方法
FCTO方法中信号相位最终被分配的绿灯时间Gi(1 ≤i≤4)由初始绿灯时间Gi′和绿延时间Ti决定。其中,绿延时间Ti已在上一小节中给出,初始绿灯时间Gi′则需根据初始信号周期C0计算得到。
信号相位的初始绿灯时间Gi′主要由有效绿灯时间gi和损失时长li组成,如式(9)所示:

其中,有效绿灯时间gi基于各信号相位的临界交通流占比进行计算,如式(10)所示:

最终的绿灯时间为初始绿灯时间与绿延时间之和,即:

为了使得最终分配的绿灯时间更加合理,设置了最短绿灯时间Gmin和最长绿灯时间Gmax用于约束过长和过短的绿灯时间。因此,信号相位最终被分配的绿灯时间Gi的计算如式(12)所示:
5 实验与分析
5.1 实验环境与数据
本文使用开源的微观交通仿真平台SUMO[17]实现如图1 所示的实验场景,并基于Matlab 提供的模糊逻辑工具箱实现模糊控制的相关处理,实验所涉及的主要参数如表2 所示。此外,实验的交通数据来自2014 年的中国“云上贵州”大数据商业模式大赛——智能交通算法大挑战,表3 显示了某交叉口在七天晚高峰时段(17:24~18:24)的车流量情况。
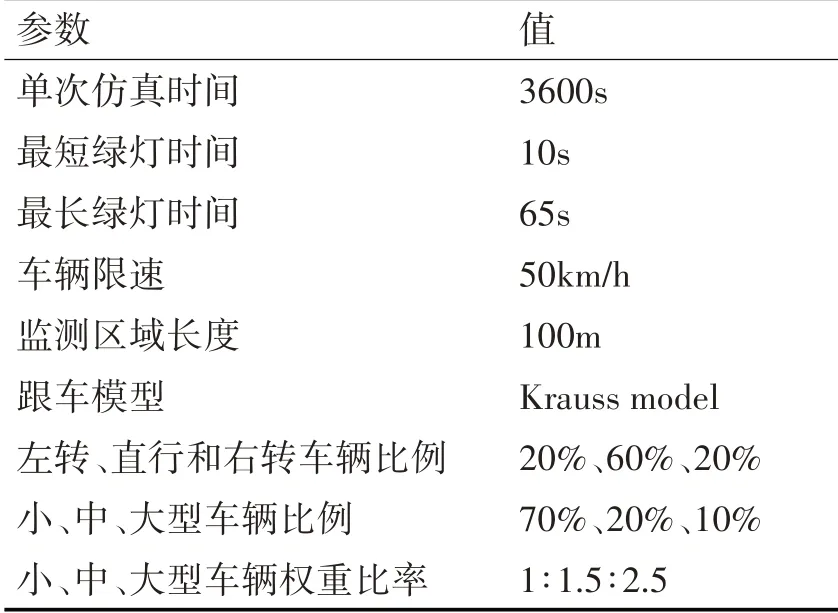
表2 主要参数

表3 各进口车流量统计/(辆/小时)
5.2 实验结果和分析
本文选取传统的固定配时法和Webster配时法进行对比实验,基于SUMO 实时监测和记录每个车辆的运动情况,并每隔100s 对所有出现车辆的信息进行数据分析。通过多次实验取平均值,比较了三种方法在晚高峰时段的性能。
首先,比较了三种配时方法在7 天晚高峰时段的平均停车时长。如图5 所示,FCTO 方法优于其他两种配时方法,具有最短的平均停车时长,且与性能较好的Webster 配时法相比平均减少了19.79%,有效减少了交叉路口处车辆的驻留时间。
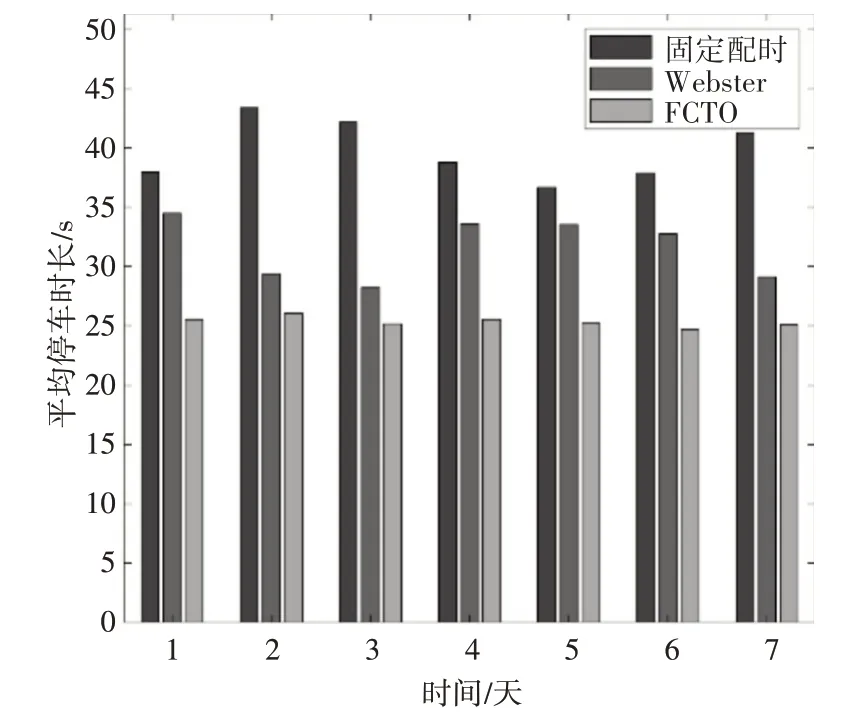
图5 平均停车时长
其次,比较三种配时方法在7 天晚高峰时段的平均车速。如图6 所示,FCTO 方法优于其他两种配时方法,具有最快的平均车速,且与性能较好的Webster 配时法相比平均提高了14.37%,有效提高了交叉路口处的通行效率。
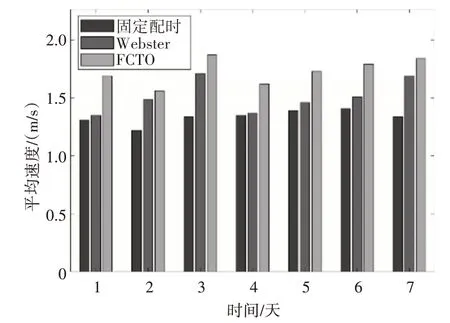
图6 平均速度
最后,比较了三种配时方法在7 天晚高峰的平均拥塞车数。如图7 所示,FCTO 方法优于其他两种配时方法,具有少的拥塞车辆数,且与性能较好的Webster 配时法相比平均减少了9.83%,有效缩减了交叉路口处的车辆排队长度。

图7 平均拥塞车辆数
由图5~7 可以看出,传统的固定配时法因未考虑各进口车流量的差异,其性能表现最差;Webster配时法虽然考虑了各进口的交通流,但是在过饱和交通流情况下存在信号周期设置过长的问题,不利于非饱和信号相位的绿灯利用率。本文所提FCTO方法表现最优,其有效解决了Webster 配时法存在的问题。同时,FCTO 方法在不同的晚高峰均表现出了较为稳定的结果,表明其具有较强的适应性,能够有效应对不同程度的过饱和交通流。
6 结语
设计和实施高效的交通信号配时方法是缓解城市交通拥堵的一种有效手段,然而现有的配时方法往往忽略了日益严重的过饱和交通流,导致绿灯时间无法被充分利用。提出一种基于模糊控制的过饱和交通流配时方法FCTO,该方法基于V2I 通信识别交叉口的过饱和状态,并在过饱和情况下使用基于模糊控制的信号配时方法来优化各信号相位的绿灯时间。基于SUMO 和真实交通流数据的实验结果表明,所提FCTO 方法在高峰时段表现出了更优的性能。
本文探讨了基于模糊控制的信号配时方法在过饱和交通流情况下的有效性。然而,文中仅考虑了单一交叉口的过饱和情况,并未考虑其上下游交叉口的影响,因此下一阶段将研究多交叉口在过饱和交通流情况下的协同控制。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
作文周刊·小学一年级版(2020年40期)2020-10-19
神州·中旬刊(2017年1期)2017-06-28
珠江水运(2016年23期)2017-01-04
现代商贸工业(2016年22期)2016-12-27
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
考试周刊(2016年62期)2016-08-15
现代电子技术(2009年15期)2009-09-30
现代电子技术(2009年13期)2009-08-31