改进的自适应非局部均值去噪算法应用与研究*
2022-08-26 09:39姚培娟张志利张亚娟
计算机与数字工程 2022年7期
姚培娟 张志利 张亚娟
(黄河科技学院工学部 郑州 450061)
1 引言
现有图像去噪算法可以分为基于图像稀疏性的字典学习去噪方法,变换域去噪算法以及空间域去噪算法等[1]。基于图像稀疏性的字典方法有全局字典算法,K-SVD(K-Singular Value Decomposition)算法等[2]。变换域算法主要包括傅里叶变换去噪[3]、余弦变换去噪[4]、K-L 变换去噪[5]、小波变换去噪算法[6]以及三维块匹配去噪算法[7](Block matching and 3D filtering algorithm,BM3D)等。空间域算法主要有邻域加权滤波算法[8]和双边滤波算法[9](Bilateral Filters,BF),以及非局部均值算法(Non-local Means,NLM)等。
NLM 算法是应用较广的一种去噪方法,但是由于方法原理的限制,其去噪性能依然存在较大的提升空间。针对上述情况,国内外学者先后提出基于图像块均值以及梯度方向的NLM 算法[10],基于图像块均值和方差的NLM 算法等[11]。上述算法效率有所提升,但是去噪效果依然不够理想。随后Tasdizen 等提出主邻域字典的NLM 算法[12],以及采用极大似然估计的NLM 算法,基于相似性验证的非局部均值算法等(Similarity Validation Based Non-local Means,NLM-SVB)[13],上述算法中引入参数较多,具有较大的不确定性,导致图像细节容易损伤,从而影响图像的去噪效果。
为解决上述NLM 算法的不足,本文提出一种改进自适应NLM 算法。该算法采用改进的边缘检测算子提取图像边缘特征,将其应用于邻域相似度权重计算;然后联合基于角度的邻域相似性和基于距离的边缘相似性来度量图像块之间的相似性,根据目标图像块的局部结构信息,对目标图像块内部相邻像素加权进行中心像素估计,从而有效保留局部细节信息。经仿真模拟验证,改进的NLM 算法具有较好的去噪效果和边缘纹理细节保护能力,BM3D算法具有均等图像质量,计算效率高。
2 常规NLM算法
NLM 算法通过图像邻域间的欧式距离计算相似性权值,对相似像素值进行加权平均实现去噪目的[14],其公式为

其中,y(i)表示原始含噪图像像素,x̂(j)表示去噪后的像素值,Sj表示以像素j 为中心的搜索窗口,wNL(i,j)表示以像素点i和像素点j为中心的两邻域相似性权重,其表达式为
其中,y(Nj)表示以j 为中心的邻域图像块像素,y(Ni)表示以i 为中心的邻域图像块像素,h 表示衰减系数,用于控制滤波强度。
然而,上述权重计算公式在高比例噪声情况下很难准确得到不同邻域图像块之间的相似性,导致该方法的去噪能力有待提升。
3 边缘约束的改进NLM算法
3.1 边缘检测算子
目前,按照边缘检测微分算子的使用阶数,传统的边缘检测算子可以分为一阶算子和二阶算子,其中一阶算子包括Roberts算子,Prewitt算子,Sobel算子,Kirsch 算子等;二阶算子包括Marr-Hildreth算子,Canny 算子,Laplacian 算子等[15]。然而上述常规算子在含噪图像中,很难准确定位和识别边缘特征,针对上述情况,本文采用改进的多尺度小波变换方法提取图像的边缘特征。
多尺度小波变换通过在每个尺度下沿梯度方向寻找模的极大值,利用阈值法得到图像边缘特征信息,从而有效均衡噪声去除和边缘定位之间的协同[16]。将二维高斯函数作为尺度函数,其表达式为

则X,Y两个方向上的一阶导数分别为
其中,x,y 表示坐标位置,σ为高斯函数的标准差(尺度系数)。对图像进行边缘检测时,尺度选取尤为重要,尺度较大容易模糊边缘信息,尺度较小容易遭受噪声干扰提取到伪边缘信息。因此,本文提出一种自适应尺度参数计算方式提取边缘特征信息,其示意图如图1所示。
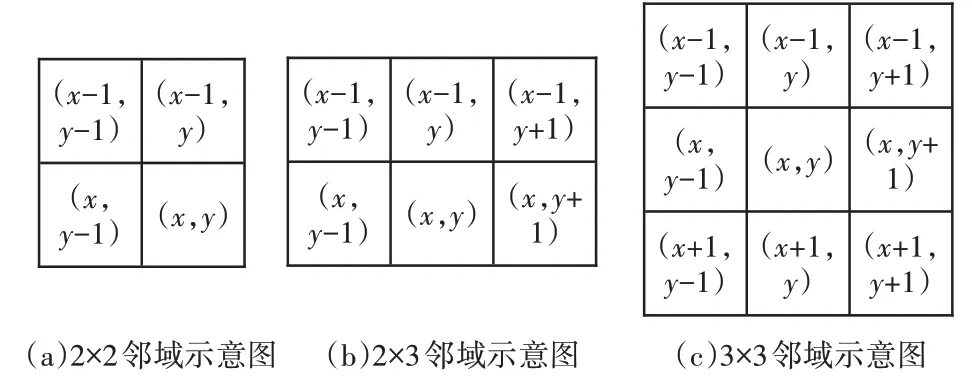
图1 三种尺寸邻域示意图
图1为一个M×N图像的三种邻域尺寸示意图,其自适应求取最优尺寸步骤如下,首先对图1(a)邻域中的顶端像素点(x-1,y-1)与其他像素值作差,将所有结果加权求取平均值;然后对图1(b)邻域中的边界像素点(x-1,y)与其他像素值作差,并加权求取平均值;最后对图1(c)邻域中的中间像素点(x,y)和其他的像素点作差,加权求取均值。遍历图像的所有像素后,得到一个M×N 尺寸的矩阵,对矩阵求取均值就得到当前图像的最优变换尺度。
计算最优尺度参数σ后,再次选取σ-1 和σ+1分别作为另外两个尺度。然后在三个尺度下,将式(5)和原始图像进行卷积运算实现多尺度分解,计算每个尺度中像素点的梯度幅值Agrd和相角α,公式如下:
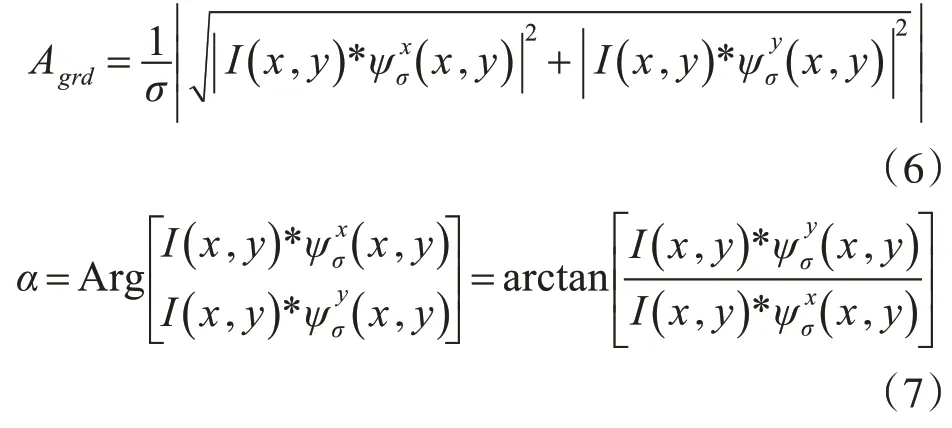
由式(7)可知,相角范围为[-π/2,π/2],将其分为四个区间,不同区间分别对应不同的梯度方向(0°(水平)方向,45°方向,90°(垂直)方向,135°方向),其具体示意图如图2所示。
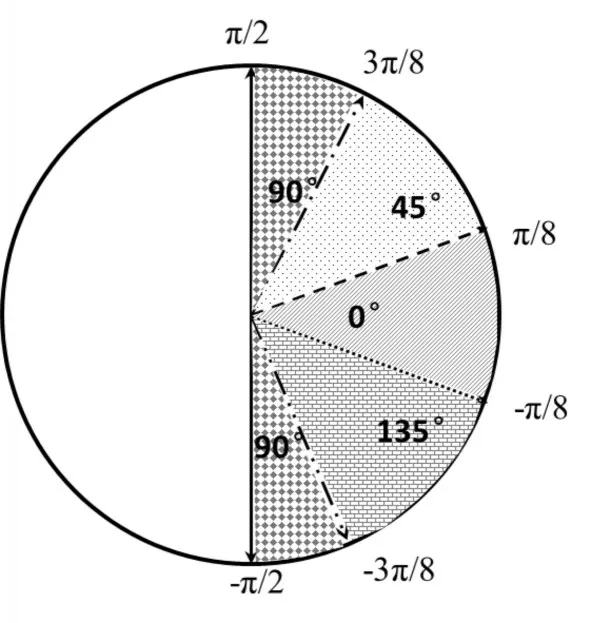
图2 梯度方向划分示意图
在不同尺度下沿不同梯度方向寻找当前位置的模极大值,通过直方图统计边缘数目,得到高低阈值,采用双阈值连接模值得到边缘特征[24]。
3.2 边缘约束的邻域相似性度量
本文应用主成分分析权重函数对噪声表现的鲁棒性特点,定义基于边缘特征约束的相似性权重度量公式为
其中,fd表示主成分分析的子空间,SI( )Ni表示以像素i 为中心的边缘像素集,则表示分别以像素i 和j 为中心的图像块的边缘相似度。h和h′分别表示滤波参数,用以调节边缘特征和平滑特征对相似度权重的影响。
为提升算法对边缘/纹理细节的保护,本文将相似性权重度量公式进行改进,则公式为


3.3 滤波参数的自适应选取
邻域中心像素叠加高斯噪声之后,主成分分析的子空间的相似性产生差异,因此,根据图像结构特征自适应设置滤波参数[25]。根据高斯分布特征,应该有一定的像素分布在不超过噪声标准差β倍的范围内,即:

则滤波参数h 和噪声方差的近似关系可以表示为

不同的图像细节结构,式(12)中的β选取不同,因此采用最大类间方差法确定自适应阈值th,将边缘特征像素值和自适应阈值映射至区间[0,6],得到纹理结构图IV和阈值re,则β可以表示为

其中,re是映射到区间[0,6]之间的阈值,由式(13)可知,当前图像块平滑,选取较大的β1,在纹理细节区域时,选取较小的β2。
3.4 目标像素去噪
为提高图像边缘/纹理细节的保护能力,本文对中心像素以及周围的邻域像素进行加权平均生成目标图像块,目标图像块的建立方式如图3所示。
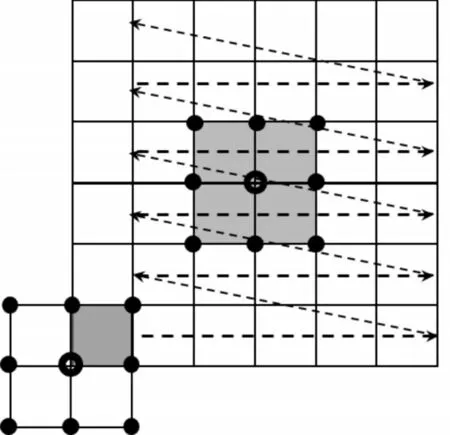
图3 目标图像块搜索建立执行过程示意图
图3中,中心的3×3图像块为目标图像块,左下角为搜索邻域图像块,虚线箭头表示搜索路径。将图像块作为输入参数,式(9)变为
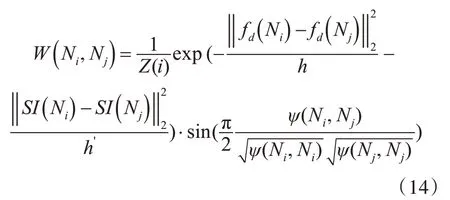
其中,Ni,Nj分别表示以i,j 为中心的图像块,结合式(12)和式(13),则包含目标像素i 的目标图像块更新为

其中,W(Ni,Nj)表示式(14)定义的数据块块相似性权重公式,̂(Ni),y(Nj)分别表示目标图像块的像素集和原始含噪邻域图像块像素集。
确定目标图像块之后,本文根据多窗口划分思想实现中心像素值去噪处理,窗口划分如图4 所示。
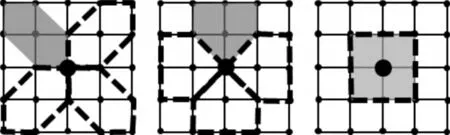
图4 多窗口划分示意图
由图4 可知,在5×5 窗口中,包含中心像素(黑色实心圆)的窗口一共有4个六边形,4个五边形,1个正方形。因此根据3×3 的中心目标图像块与周围8 个多边形邻域图像像素块的相似性进行加权,则最终的去噪结果表达式为

其中,W(i,jk)表示式(9)定义的相似性权重公式,̂(i),y(jk)分别表示去噪后像素和原始含噪像素。
4 方法测试及结果分析
4.1 标准灰度图像测试
标准灰度图像Baboon 图像添加均值为0、方差为20 的高斯白噪,则含噪图像和去噪结果局部放大图如图5 所示,在本次仿真测试中,搜索窗口大小为13×13。
由图5 可知,常规NLM 方法去噪结果图像模糊,存在部分“虚假纹理”;文献[10]方法相对较好,但是图像质量差,细节信息损伤严重;文献[11]方法细节保持较好,但是去噪能力有限;文献[12]方法去噪能力相对较好,但是边缘纹理等细节模糊;文献[13]方法相对以上算法效果较好,但是其去噪结果仍旧有待提高;BM3D 去噪结果细节最为清晰,图像的“鼻梁”和“胡须”轮廓清楚。本文方法的去噪结果和BM3D结果近似,优于另外五种去噪结果。
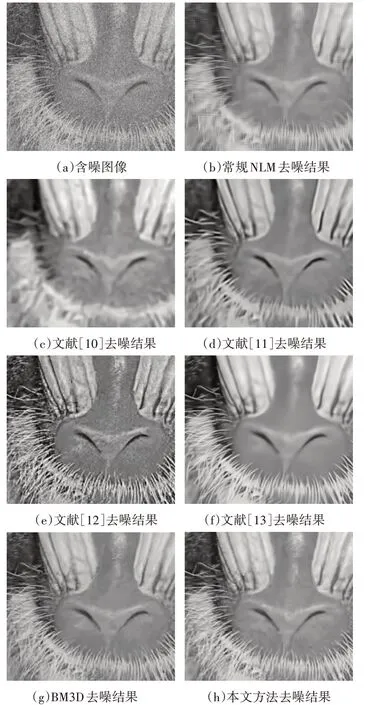
图5 方差为20的含噪测试图像及其去噪结果
为进一步定量分析不同方法的去噪效果,采用峰值信噪比(PSNR)和平均结构相似性(Mean Structural Similarity,MSSIM)作为评价标准,将不同测试结果的PSNR 和MSSIM 进行统计,结果如表1所示。
由表1 可知,常规NLM 算法PSNR 平均提升43.7%,平均结构相似性平均值为0.75;文献[10]算法PSNR 值平均提升46.8%,平均结构相似性平均值为0.78;文献[11]算法平均提升48.6%,平均结构相似性平均值为0.79;文献[12]算法的PSNR 平均提升50.3%,平均结构相似性平均值为0.80;文献[13]算法的PSNR 平均提升52.5%,平均结构相似性平均值为0.805;BM3D 算法的PSNR 平均提升55.3%,平均结构相似性平均值为0.83;而本文算法的PSNR 值平均提升54.9%,平均结构相似性平均值为0.82。由此可知,本文算法的去噪效果和BM3D 算法的去噪效果几乎一致,证实本文算法的有效性和合理性。
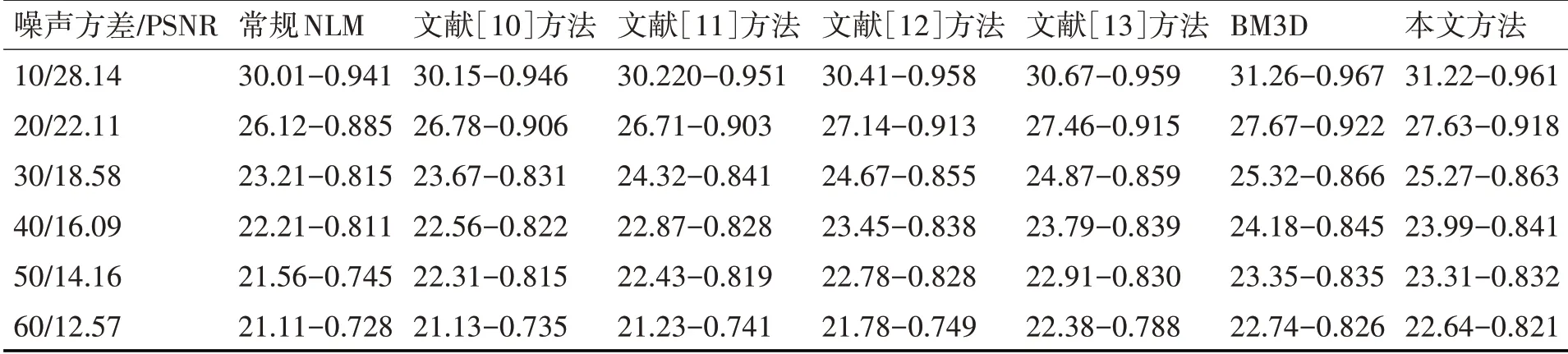
表1 不同方法的Baboon测试结果PSNR(dB)-MSSIM
4.2 实际B超图像验证
常规去噪算法在进行B 超图像噪声去除时,图像的边缘/细节纹理和去噪效果之间很难同时兼顾,为进一步验证本文算法的测试效果,将本文算法和其他六种算法的B 超图像去噪效果进行对比,其效果如图6、图7所示。
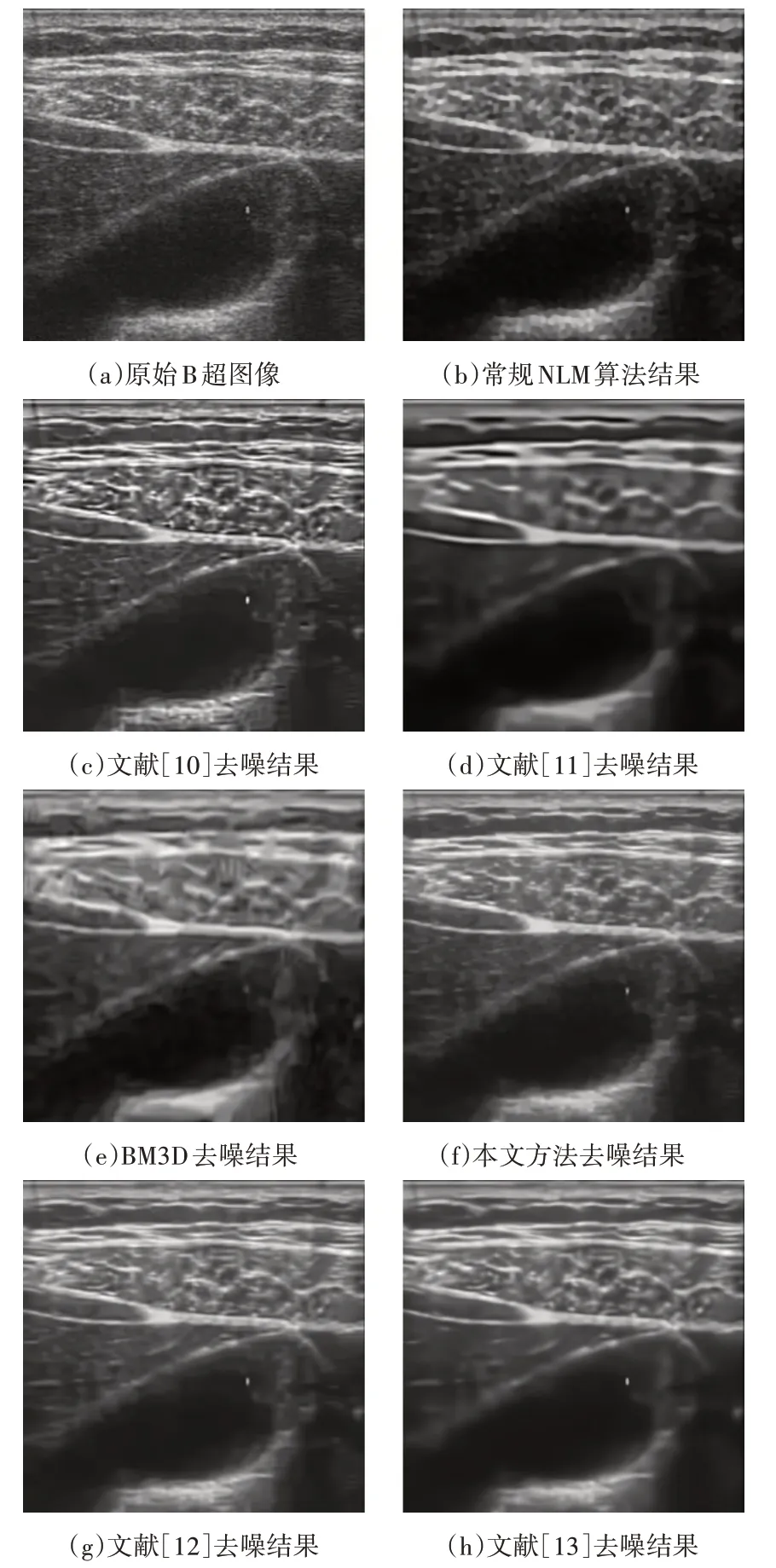
图6 不同方法的B超图像去噪结果
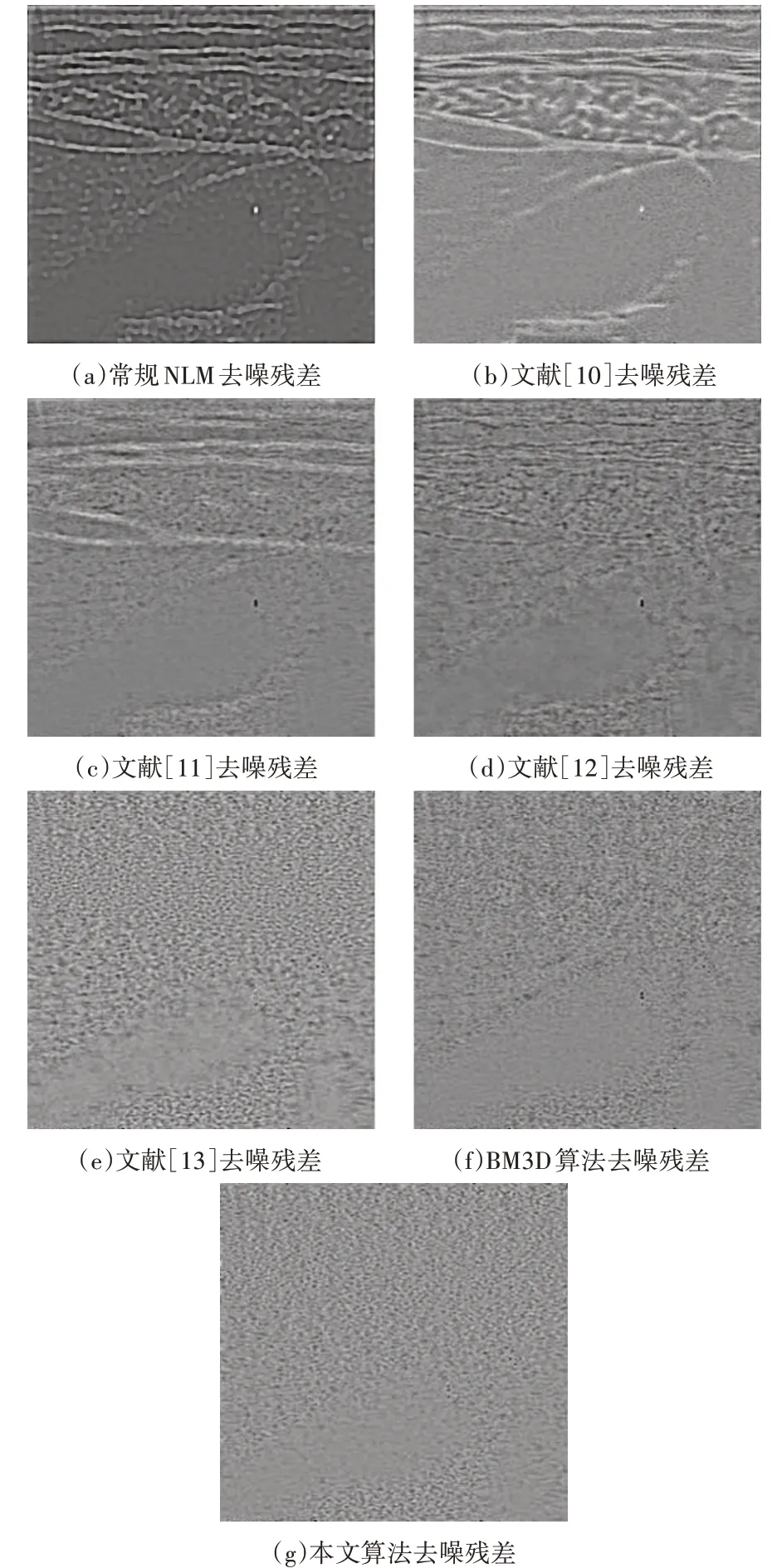
图7 不同算法的去噪残差
由图6 和图7 可知,常规NLM 算法结果纹理细节较为模糊,其去噪残差中存在较多的连续结构信息,表明对图像的细节损伤较为严重;文献[10]和文献[11]结果相对较好,但是残差中依然存在一定的连续结构信息;文献[12]和文献[13]图像质量提升较好,但是残差中存有少量的连续纹理以及“大颗粒”斑状噪声,说明去噪过度;BM3D 方法和本文方法去噪结果中,几乎不含连续的纹理结构,去噪残差中的噪声颗粒分布均匀大小适中,表明去噪结果好,对纹理细节保护好。
由于实际B 超图像几乎没有不含噪声的图像,因此常规算法很难评价,针对上述情况,本文采用完全无参考算法(Natural Image Quality Evaluator,NIQE)对去噪结果进行评价,同时统计不同结果的专家评估值,则B 超图像处理前后的评价值如表2所示。
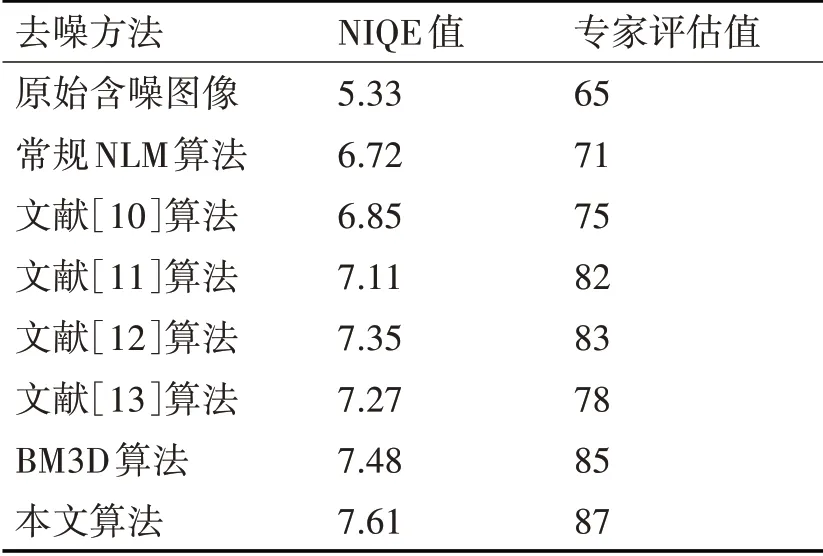
表2 实际B超去噪结果的评价值
由图7、图8 和表2 可知,本文方法和BM3D 方法的去噪效果最好,二者结果的去噪评价值最高。然而BM3D 算法属于混合变换域去噪方法,复杂度高,其处理时间约为本文算法的3 倍左右,因此很难满足图像处理实时计算的需求,很大程度上限制BM3D算法的使用范围。
5 结语
本文提出一种基于边缘约束的改进NLM 算法,在去除噪声的前提下能够保持边缘/纹理细节。经一系列的仿真实验证实,本文方法相对于常规去噪算法,在边缘/纹理细节保持和噪声压制等方面具有更好的优势。和BM3D 算法相比,在具有相近去噪能力情况下,具有更高的计算效率。
猜你喜欢
校园英语·上旬(2020年1期)2020-05-09
保健与生活(2019年7期)2019-07-31
小资CHIC!ELEGANCE(2018年33期)2018-11-08
卷宗(2017年16期)2017-08-30
Coco薇(2017年8期)2017-08-03
雪莲(2017年2期)2017-05-12
环球市场信息导报(2017年1期)2017-04-08
Coco薇(2015年5期)2016-03-29
国外科技新书评介(2014年12期)2015-01-05
数理化学习·高一二版(2009年2期)2009-03-30