
基于高次谐波X 射线光源的三维纳米相干衍射成像技术*
2022-08-28 09:26麻永俊李睿晅2李逵2张光银2钮津2麻云凤2柯长军鲍捷陈英爽吕春李捷2樊仲维2张晓世2
物理学报 2022年16期
麻永俊 李睿晅2) 李逵2) 张光银2) 钮津2)3) 麻云凤2) 柯长军 鲍捷 陈英爽 吕春 李捷2) 樊仲维2) 张晓世2)†
1)(中国科学院空天信息创新研究院,光学工程研究部,北京 100094)
2)(中国科学院大学光电学院,北京 100084)
3)(大连海事大学信息科学与技术学院,大连 116026)
4)(电子科技大学自动化工程学院,成都 610000)
5)(成都金支点科技有限公司,成都 610000)
相干衍射成像是近20 年才发展起来的一种高分辨率计算成像技术.其原理是通过采集相干光照明时样品产生的衍射图样,使用相位恢复算法计算实现样品结构的三维(3D)成像.区别于传统成像技术,该技术具有多个显著优势: 1)成像分辨率接近于照明光源波长;2)成像系统简单,无需使用成像镜头,成像系统通常由相干光源、样品和CCD 组成;3)无相差、色差,极紫外光子利用率高: 使用计算成像,避免了引入器件的折射、反射和吸收等效应造成的相差和色差以及光子利用效率下降.自上世纪末,基于大型相干极紫外和X 射线光源的相干衍射成像技术发展迅速,已达亚纳米级分辨率.此后,随着飞秒激光高次谐波技术的成熟,相干极紫外和X 射线光源的体积和成本大幅度降低,相干衍射成像技术得到进一步发展和推广.发展至今日,基于高次谐波的相干衍射成像技术已经成为一种有巨大应用潜力的纳米成像技术,为半导体材料和器件表面形貌、生物微结构及动态演化、半导体和量子器件的化学成分及浓度分布、物理或化学动态过程以及量子状态等领域的探测成像提供了一种有效的技术方案,并开始在高分辨率半导体检测领域中获得实际应用.相信不久的将来,基于高次谐波相干衍射成像技术将成为纳米量级显微成像技术的杰出代表,成为和现有的原子力、近场光学、X 射线、电子以及隧道扫描等显微成像相媲美的主流技术.本文回顾了相干衍射成像及其照明光源技术的发展历程,介绍了相干衍射成像技术现状和发展趋势,然后说明高次谐波光源和相干衍射成像技术原理,最后重点介绍了几种可以利用高次谐波的高相干、短波长、短脉冲及梳状超宽谱特性的衍射成像技术: 探针强度约束、反射模式、频闪照相、多模态叠层、单次曝光叠层、时间分辨多路复用叠层、角度扫描相敏成像等技术.
1 引言
光学显微成像技术是人类对微观世界最直观、最重要的感知手段.随着半导体技术、纳米科学以及新兴的量子技术的飞速发展,现代显微成像手段不但需要探测纳米甚至亚纳米级的复杂三维(3D)结构,而且还需要探测这些结构的物理、化学甚至量子特性以及动态演化过程.传统成像技术为了实现纳米级的3D 分辨率,在成像系统中必须使用精密、复杂且昂贵的光学成像镜头,同时辅以高精度的3D 扫描技术,其局限性可简单总结为以下3 点: 1)成像镜头的数值孔径限制了高频信息的获取,从而制约了成像分辨率;2)由于光学器件固有的相差和色差,高分辨率成像技术达到和突破衍射极限需要付出很大的代价;3)由于光场的频率高达到PHz,光电探测器设备无法跟上电磁场的变化,只能记录强度信息,而相位信息丢失,因此不能直接获得样品的3D 信息.在现有的高分辨率成像技术中,通常做法有: 1)通过采用高折射率和负折射率材料的液体或浸没式透镜来提高成像系统的有效数值孔径[1,2];2)选用短波长的光照明,如X 射线显微镜;3)采用突破常规的思路的超分辨率成像技术,如受激发射损耗显微技术(stimulated emission depletion microscopy,STED)[3]、近场扫描显微术(scanning near-field optical microscopy,SNOM)[4]、双光子或多光子显微镜技术(two-photon or multi-photon Microscopy,TPM or MPM)[5,6]与随机光学重建显微法(stochastic optical reconstruction microscopy,STORM)[7].然而,为了实现3D 成像,这些技术都需要借助于高精度扫描或者定制的层析算法才能分析出样品的3D 结构.
相比上述复杂而昂贵的高分辨率成像方法,相干衍射成像技术(coherent diffraction imaging,CDI)[8]提供了一个简单而实惠的思路,利用样品的相干衍射图样,通过计算恢复样品图像的相位,实现3D 成像.CDI 技术颠覆了传统的成像思路:1)无透镜成像,避免了使用透镜引入的像差和孔径限制;2)无扫描3D 成像,通过记录物体远场衍射图样,使用先进的相位恢复算法重建振幅和相位信息,获得样品的3D 结构.总之,CDI 在不需要使用精密复杂且昂贵的成像光学器件的情况即可以达到成像系统的衍射极限,实现高分辨率.
按照阿贝的分辨率理论,对于相干光照明,显微系统的极限分辨率为: 分辨率=λ/(2NA).NA是系统的数值孔径.因此,提高CDI 成像分辨率,可以通过减小样品到成像器件的距离、增大成像器件的面积来提高数值孔径,以及使用短波长的相干光源.CDI 在显微成像领域异军突起,独树一帜,然而要成长为主流的显微成像技术,目前仍存在下几个挑战: 1)需要高效的相位恢复算法和高端的计算机硬件;2)需要工作在照明波长的高速、低噪声、高分辨率、大阵列和大面积的数据采集相机;3)高亮度、高相干性、极短波长的照明光源.针对这些挑战,人们充分利用相干光源、计算机、人工智能和信息技术的发展成果,把相关技术应用到相干衍射成像中来,大幅度提高了成像能力.
随着高频、多核心与并行运算的CPU 应用于计算机,要实现高分辨率3D 纳米成像计算量的要求,现有的计算处理软件和单机就能胜任.然而随着CDI 技术成像功能的拓展,如动态实时成像、覆层下纳米结构成像、材料化学成分和浓度检测、以及极短时间分辨的物理过程观测,需要处理海量的数据,运算量大增,对硬件也提出了更高的要求,需要提供包括高性能网络、高性能处理器、高性能服务器、高性能存储器件等硬件,甚至需要具备强大的图形处理、编程能力及储存功能的图形处理芯片(graphics processing unit,GPU)、深度学习算法芯片(tensor processing unit,TPU)、嵌入式神经网络处理芯片(neural network processing unit,NPU).在计算软件方面,近年来科研人员针对不同情景和模式以及不断提升的计算机硬件,也还在源源不断地开发新的算法.借助于现代计算机的超级运算能力和丰富算法,CDI 成像也会越来越精确与高效.
为了实现高分辨率的3D 成像,数据采集需要CCD 的光电感应像素及存储单元具备以下条件:1)至少16 位的动态范围;2)大面积高分辨率的像素阵列(通常要求不少于2048×2048 的CCD 阵列);3)高速度的模数转换器.传统的CDI 采用在极紫外和X 射线波段具有高量子效率的CCD 芯片作为图像采集器件,现在已经基本可以实现视频帧率(60 Hz 以上)的高分辨率CDI 成像.然而,CCD芯片的模数转换器通常为串行处理方式,随着阵列密度的增加转换速度也相应变慢,通常通信采集的帧率在1 Hz 量级.为了在这些方面实现突破,各大X 射线相机生产厂家开始采用先进的CMOS相机芯片,原因是CMOS 芯片的数模转换器通常为并行处理方式,因此CMOS 的帧率在最高分辨率的情况下已经可以达到1 kHz 量级.
高亮度和高相干的光源是CDI 的必备条件,CDI成像技术是伴着照明光源的不断进步逐步发展成熟的.图1 简单概括了CDI 的发展简史.虽然衍射图样恢复一般样品的想法出现较早,但是直到1999 年才在同步辐射(synchrotron radiation source,SRS)X 射线上首次实现CDI[9].此后,逐步涌现的先进的大型同步辐射光源和自由电子激光器(X-ray free electron laser,XFEL)[10,11]为CDI 发展提供了条件,该技术首先在科研上得到了应用.然而大型设备不但造价昂贵,结构复杂,而且可以使用的线站数量和时间都受到极大的限制,因此无法实现CDI 的进一步推广和应用.基于飞秒激光的高次谐波X 射线光源(high-order harmonic generation,HHG)[12,13]的出现改变了这种局面.HHG 光源只有桌面大小,造价、体积和能耗都不及SRS和XFEL 光源的千分之一,并且已经可以产生高相干度的极紫外光(extreme ultra violet,EUV)和软X 射线(soft X-ray,SXR)光束.

图1 HHG相干衍射成像(HHG-CDI)的发展史Fig.1.The evolution of HHG-based coherent diffraction imaging (HHG-CDI).
HHG 应用于CDI(HHG-CDI)可以充分发挥该光源超短、超快、宽光谱、高相干性和小型化等特点,推动着CDI 技术的小型化并实现跨越式发展: 2008—2015 年间,HHG-CDI 实现了反射模式的CDI[14-16]、锁孔照明相干衍射成像法(keyhole coherent diffractive imaging,Keyhole-CDI)[17,18]和叠层扫描CDI 成像(ptychography CDI)[14],至此,HHG-CDI 的成像模式不再局限于透射模式,样品不再局限于独立样品成像;此后的2016 年,HHGCDI 首次实现了探针振幅约束(modulus enforced probe,MEP)的ptychography CDI 技术[19,20],至此成像对象可以是周期性的样品,该技术的出现让CDI 的应用可以扩展到芯片检测应用领域;2017年HHG-CDI 首次成功实现基于大角度反射(掠入射)衍射条纹校正的CDI 算法[21],可以重建宽视场、高分辨率的稳定图像,非常适合于纳米电子设备检查,受到广泛关注.各种成像技术层出不穷,也使HHG-CDI 有了更广的应用空间,如部分相干光衍射成像的方法[22],多模态相干衍射成像法(multistate Ptychography,MSP)[23],频闪照相CDI[24,25],结合单次曝光CDI和扫描CDI 的单次曝光叠层成像(single-shot ptychography,SSP)[26,27],时间分辨多路复用叠层成像(time-resolved Imaging by Multiplexed Ptychography,TIMP)[28,29]和最近可以同时探测纳米结构表面、多层界面形态及化学成分和掺杂浓度的多角度反射相敏成像技术[30].
总之,HHG 光源的出现实现了CDI 技术的小型化,把CDI 技术从最初使用同步辐射光源通过透射模式成像的成像技术[9],快速推进到能提取出样品刻蚀深度信息、分辨率接近波长的3D 成像[31],同时拥有时间[32]、化学成分和掺杂浓度分辨能力的5D 成像技术[30].可以预见,随着HHG-CDI 的持续发展,成像的精度和效率将进一步提高,它将逐步成为一种重要纳米成像技术,在纳米材料、量子器件、生物医学、原子分子物理等领域获得广泛应用[8,33-38].本文内容总共分为6 节,第2—6 节具体内容安排如下: 第2 节介绍最具潜力的CDI相干照明光源—HHG 光源;第3 节介绍相干衍射成像的技术原理;第4 节着重介绍几种先进HHGCDI 衍射成像技术;第5 节讨论HHG-CDI 技术前景和挑战;第6 节给出结论.
2 HHG 光源
与已有大科学装置X 射线源相比,HHG 光源具有造价低、易实现、体积小等特点.为了实现易于推广的高速、高分辨的CDI,理想的照明光源需要具有包括短波长、高相干度、高光谱亮度、小型化和方便使用等重要特点.早期的CDI 采用的是同步辐射光源,成像效率和分辨率都不高.此后出现的更先进的同步辐射源和自由电子激光有效地解决了这方面的问题,然而这些大型设备构造复杂、体积庞大、造价昂贵、建设周期长,不能满足大量用户同时使用,极大地限制了该技术的推广和应用.图2 给出了我国上海光源(同步辐射加速器和自由电子激光器)的实物图,上海光源主加速器(鹦鹉螺)周长432 m,紧邻的软X 射线自由电子激光装置总长532 m,而建设中的硬X 射线自由电子激光器总长约3.1 km,投资近100 亿元.与之相比,图2 同时给出了作者团队设计的台面大小的HHG 激光光源,该类型的光源无论是造价、体积还是能耗都大幅度降低.此外,HHG 光源可以产生1—200 nm 光谱范围的激光光束,在相干度和稳定度方面已经超越了大型光源,而且某些波段的光功率甚至达到了同步辐射加速器和自由电子激光器的水平[38].

图2 (a)上海光源主加速器;(b)台面HHG-EUV/SXR 射线光源Fig.2.(a)Shanghai synchrotron radiation facility(SSRF);(b)a HHG-EUV/SXR source.
HHG 源于1987 年Mcpherson等[39]利用红外皮秒脉冲和惰性气体作用产生短波光的光学实验.由于没有很好的理论解释,起初该发现没有受到很多关注.直到1993 年,Krause等[40]和Corkum[41]采用半经典原子电离理论成功地解释了HHG 的产生原理.该原理后被称为“三步模型”,如图3 所示,首先,原子的势垒在激光场调制下发生畸变,势垒严重不对称,在激光场方向一侧变矮变薄,由ADK 理论,电子在高强度基频激光电场的作用下会有一定的概率发生隧穿电离成为准自由态的电子[42],这时激光场对电离电子的影响远大于库仑场,即所谓的强场近似.然后,电离的自由电子在外电场的加速作用中振荡获取额外的能量(有质动力能),电子运行的轨迹随电离时刻的不同会有显著的差异,有一些电子将回不到原子核(母核),一些电子在振荡电场反向时可加速回到母核附近,最后被母核俘获回到基态,同时辐射出频率为基频激光的奇数次的HHG 光子.通过模拟计算,大约有1/3 的电离电子最终被捕获,可获得的最大动能为 3.17Up,Up是电子在激光场中的有质动力势能,另外2/3 的电子则无法与母核复合[43].谐波的光子能量通常可以达到EUV 甚至X 射线的光波段.三步模型描述了激光和原子中电子通过高阶非线性相互作用产生高空间相干度的HHG 的过程.该模型还成功解释了HHG 特殊的谐波光谱的特性: HHG 光谱通常分为平台区和截止区,其中平台区的谐波转换效率基本相同,而截止区的谐波效率随着阶次的提高快速降低,截止谐波的频率可由下式表示:

图3 HHG 产生的“三步模型”.原子势垒会被激光场调制,电子发生隧穿电离;然后在激光电场加速;随着电场反向,电离电子与母核复合,把获得能量以HHG 光子辐射 (制作本图参考了文献 [49])Fig.3.The illustration of the three-step Model.The tunneling ionization can occur as the atomic barrier is modulated by the laser field.Then the electron is accelerated in the electric field;As the electric field is reversed,the ionized electron recombines with the parent nucleus and radiates its energy as HHG photons,Figure reproduced from Ref.[49].

其中Ip是原子的电离势,有质动力势能定义为

其中E是线偏振激光场,me是电子质量,ω0激光频率.
“三步模型”描述了HHG 产生的微观过程.宏观情况下HHG 介质由多个原子组成.为了有效地提高HHG 的转换效率,产生低发散角和高相干度的HHG 激光光束,必须结合HHG 产生的微观过程和宏观过程.HHG 频率转换的宏观过程中最重要的就是相位匹配.HHG 的相位匹配受到非线性介质大于1 的折射率和介质电离后自由电子小于1 的折射率的相互平衡和制约,实现最佳的平衡为相位匹配带来了挑战.除此之外,还需要考虑工作气体的吸收,各种介质产生的HHG 波长的上下限等.
围绕相位匹配方法,人们尝试了多种技术手段来产生 HHG X 射线,如气体喷嘴、气室或加压充气波导管作为产生和实现HHG相位匹配的主要方法.此外,还有利用双向传播的激光脉冲,双色光或多色光对谐波过程中的电子控制来实现相位匹配或准相位匹配(相位失配的周期性校正)的方法.在所有实现HHG 的装置中,自由空间聚焦方法(图4(a))实验上最容易实现,但是激光只在焦点前后较小的范围内达到峰值光强,因此HHG 的产生将被局限在焦点前后的小范围内,存在转化效率低、谐波转化不充足、以及谐波的功率和光斑模式不稳定等缺点.通过不断探索,人们发现,基于空芯波导的HHG 技术(图4(b))是实现相位匹配和提高转换效率的有效方法,产生的HHG 不但更加稳定而且有更高的空间相干性[44].1998 年 Rundquist等[45]首次在充氩气毛细管中对23—31 次谐波的相位匹配进行了研究.2002 年,Bartels等[46]使用充气的空芯光纤首次实现了全空间相干的HHG极紫外激光.Zhang等[47]曾采用脉冲自压缩产生了增强的高谐波以及基于空心波导与反传播脉冲的准相位匹配方法[48]实现了HHG 极紫外光的增强输出.

图4 自由空间聚焦与空心波导HHG 对比图Fig.4.The comparison of HHG in free space focusing and hollow waveguide.
基于空芯光纤的HHG 技术,利用压缩脉冲在同一波导内产生HHG 的相位匹配方法简化了几何结构,显著提高光通量和转化效率,能产生高亮度的超短HHG 脉冲.如在一个充有惰性气体的毛细波导内实现相位匹配和脉冲压缩结合,被压缩的激光脉冲在低压下电离气体介质中可以产生X 射线连续谱,其谱宽对应于一个孤立的阿秒的脉冲[47].此外,空芯光纤技术产生的HHG 具有更高的空间相干性,因为空芯光纤的长度越长,产生的空间相干性越高[44].近年来,多种新型的光纤如反谐振光纤[50]、光子晶体光纤[51]等越来越多地被用在HHG 产生,并且取得了不错的成果.
总之,新型的HHG 光源结构简单造价低廉,这给光源的建造、维护、应用和推广带来了极大的方便.随着HHG 技术的不断成熟,高光通量、高稳定性、短脉宽、短波长的HHG 光源将会得到大规模应用,逐渐成为CDI 技术的最主要的照明光源之一.
3 CDI 技术及其原理
作为一种利用衍射强度的测量数据重建样品空间结构的无透镜成像技术,CDI 技术综合了衍射手段、采样理论和相位恢复算法,在重建样品的各个环节中,相位信息的成功复原非常关键.在CDI技术中,一般利用必要的约束条件根据记录的强度信息,使用迭代的方法重建相位信息.利用衍射还原一般样品的想法[52]直到1999 年才第一次成功实现[9].CDI 实验的成功很快引起人们的重视,在当时世界上陆续建造的一些同步辐射装置的支持下,掀起了一轮CDI 技术研究的热潮.相干衍射成像已从最初的平面波CDI 发展成适用多种情景的成像技术: 布拉格CDI[53]、扫描 CDI(又称层叠成像,Ptychography)[54]、菲涅尔CDI[55]以及反射CDI[56].其中以叠层扫描Ptychography 最为成功,不但可以实现对扩展样品的成像,视场远大于光探针的尺寸,还能够对材料的纳米结构进行3D 高分辨率成像(图5).

图5 平面屏衍射示意图Fig.5.The schematic chart of plane diffraction.
3.1 衍射成像原理
按照标量衍射理论,在远场相干衍射成像中,探测器接收面的波前函数为(反射或透射)样品出射波的傅里叶变换,而样品出射波函数是由探针P(x,y)和样品O(x,y)共同决定(这里以平面样品做原理说明很容易推广到三维):

由菲涅耳-基尔霍夫衍射积分公式,利用可以得到衍射面上波前函数复振幅的分布.对于远场衍射可以简单地用下式表示:

即样品出射光波的波前函数和探测器平面处的衍射光波前函数满足傅里叶变换关系.样品出射波携带有样品的信息,它在空间域的传播对应出射复振幅某种表达的积分变换(远场为傅里叶变换).因此如果已知衍射波复振幅(包括幅值和相位),则可以通过逆变换得到样品出射波函数E(x,y),由方程(3)就可以得到实空间的样品信息O(x,y)E(x,y)/P(x,y).但是探测器只能探测到强度信息,CDI 中收集到的衍射图为复振幅E(x,y)的傅里叶变换的平方|F|2,并不包含衍射复振幅的相位信息.因此,通过记录的衍射强度图,加上必要的限制条件,然后通过反演计算恢复出包含相位信息的复振幅E(x,y)即可获取样品的空间结构信息,这就是所谓的相位恢复/重建.
3.2 采样约束条件和相位恢复/重建
如前文所述,测量衍射图样时只记录了振幅信息而相位丢失,为了实现复振幅的再现,对丢失的相位信息的恢复是CDI 技术的核心问题.1982 年,Bates[57]通过自相关的理论分析认为要从衍射强度图样获取样品相位,在每个维度上取样频率至少要为布拉格衍射频率的两倍,即所谓的“采样约束条件”.由自相关理论可知,衍射波函数的功率谱是其自相关函数的傅里叶变换:

自相关运算是一个卷积运算,若样品出射波函数离散为M×N的矩阵,则自相关矩阵扩展为(2M-1)×(2N-1).在做离散傅里叶变换时,(u,v)平面和(x,y)平面的应取样相同的取样点数,这时可将E(x,y)通过补零操作,因此Bates 认为在 (x,y)平面每个维度应保证与有效数据同样多的冗余量,比如二维系统,需要4 倍过采样,同样三维系统需要8 倍过采样,以此类推.
Miao等[58]研究了Bates 的理论,认为该理论过于苛刻,他提出了所谓的过采样理论,定义过采样率σ=测量点数/未知点数.当过采样率σ>2时,相位信息就可以唯一确定下来.可以简单地这样理解: 每个未知的点要用两个实数值分别表示振幅和相位(或实部虚部),而强度测量值是实数(振幅的平方),测量点的数目给出了方程的个数.只有方程的数目至少等于未知数的数目时才可能有确定解.对于一维情况(多维类似):

其中,I代表强度测量值,f代表要复原的复振幅.(6)式中,利用傅里叶变换的离散化形式,想要从N个I(uk)(正实数)中求解N个复数f(xl),一般情况是做不到的.一个可行的方案是补零,把f(xl)的个数扩展成2N大小,这样由于增加点的值(零)是已知的,相当于增加了方程的数目而未知量的数目不变.这就要求样品必须是孤立的,非零区域的边界构成了支撑域.
在CDI 中,重建相位信息至关重要.在波传播过程中相位重建可以分为两类,一类是相位恢复的迭代算法[59,60],1971 年Gerchberg和Saxton 首先利用衍射图样强度信息和样品振幅信息,将其作为约束条件,通过迭代算法最终得到正确的相位信息(G-S 算法).如图6 所示,场复振幅在样品平面和CCD 衍射平面之间沿正方向(FFT)和逆方向(IFFT)传播,在两个平面上对复振幅实施约束,迭代结束时得到样品的3D 数据.根据样品空间的约束条件不同表现为G-S 算法、误差减少算法(error reduction,ER)和混合输入输出算法 (hyrid input output,HIO)[61]等.另一类是光强传播方程即 (transport intensity Equation,TIE)方法[62,63],这是确定性的演化方程算法,适用于旁轴模型,光强传播方程算法需要沿光传播方向,在不同位置多次测量光强分布,不但实验过程十分复杂,而且离轴或高数值孔径下成像会带来误差,因此在CDI相位恢复中主要采用投影迭代算法.

图6 CDI相位恢复算法原理Fig.6.The technical schematic and algorithm flow chart of CDI.
1952 年,Sayre[64]第一次提出在晶体学背景下从衍射图样恢复相位的问题,晶体的周期性结构使得相位检索比一般的非晶体结构要容易得多.CDI 技术的相位重建是利用光电场的复振幅在样品面和衍射面的反复映射(正向和逆向迭代),并施加约束条件来实现的.Hoppe[52,65,66]于1969 年前后提出关于CDI相位恢复的技术思路(这期间他还首次提出了Ptychography 的概念[67]).在G-S 理论中样品的振幅信息是已知的,然而出射波振幅信息并不总是能够事先获知,所以人们引入的支撑域概念(suport)[61]和自适应调整支撑域的收缩包方法(shrink-wrap)[68],在这种条件下,恢复样品时需要同时重建相位和振幅.后来出现更多相位恢复算法被开发出来,在进行样品重建时有了更多的选择,如ER和HIO 算法,松弛平均交替反射(relaxed averaged alternating reflections,RAAR)算法,差分图算法(difference map,DM)等.图7 给出了典型的迭代求解方法,从一个随机的初始猜测,投影到检测器平面(频率约束集),然后投影到样本平面(支撑约束集),反复迭代收敛到真解的过程.由于CDI相位迭代不是凸集映射,因此有可能会落入局部极小值而收敛不到真值,因此在具体的相位迭代重建过程中,常采用多方法的混合使用,尽量避开局部极小值的影响,一般能得到较好的结果.

图7 凸集映射示意图,一个随机猜测投影到检测器平面约束集,然后投影到样本平面约束集,完成一个更新周期.多次迭代后,找到两个约束集的交点: 真解Fig.7.Diagram of convex-set mapping,a random guess is first projected to the detector plane constraint set,then to the sample plane constraint set to finish a full updating cycle.After many iterations,the solution is found at the intersection of the two constraint sets.
3.3 频率空间约束和样品空间约束
相位恢复问题可以归结为寻找满足这两个约束的函数x∈ℓ,即x∈S ∩M.在相位恢复问题中,测量值由信号x的傅里叶变换F(x)的模m组成.一般物理信号可以在复希尔伯特空间建模[69]:

式中,信号x是一个平方可积函数,将连续变量t∈RN映射到复数x(t)∈C.满足傅里叶空间约束的信号集为

除了成像模型之外,相位恢复问题中通常可用的一个重要信息是,x的支持包含在一些集合D∈RN中.如果让 1E表示集合E的特征函数(E∈RN),是它的补集,那么这个样品空间的约束将x限制在集合

相位恢复问题可以归结为寻找满足这两个约束的函数x∈ℓ,即x∈S ∩M.
在CDI 中常在样品出射平面和探测器衍射平面施加约束:S集和M集.在衍射平面施加的约束称为“强度约束”或 “模量约束”,是要求衍射复振幅的平方必须等于探测器的测量值,又称“频域约束”、“傅里叶空间约束”;在样品空间的约束满足所谓的“过采样条件”,我们称之为“样品空间约束”,可以通过两种方法实现: 1)单次衍射CDI 使用“有限支撑域约束”;2)叠层扫描CDI 使用“重叠约束”.
在传统的CDI 中,支撑域定义为样品波函数有效的取样区域(非零区域),有限支撑域约束要求支撑域不大于样品出射波的定义域(总取样区域)的一半.在有限支撑域约束方法中,用测得的衍射强度的平方根在频率空间替换计算投影到探测器平面的衍射波复振幅的模量|g(u)|,同时保留衍射波复振幅的相位获得新的衍射波复振幅,然后逆传播(积分变换)到样品平面得到更新的样品出射波函数,在支撑域内的波函数保留,在支撑域外的波函数根据不同的算法或舍弃或有条件地保留.在不断迭代的过程中,衍射强度的信息和支撑域给出的样品轮廓信息对收敛的方向施加强烈的限制,噪声、孪生像、平移像等伪解被不断剔除.在早期采用的G-S 算法中是在样品振幅信息已知的前提下重建相位信息,而Fienup 的ER和HIO 算法采用支撑域的概念相当于放宽了样品振幅信息已知的条件,这在实际操作上更加方便,大大提高了相位恢复的效率,加快了收敛的过程,成为X 射线和电子束成像领域中的重要算法,但此时需要更多的衍射数据信息量来恢复样品.引入支撑域约束,保证了相位恢复的唯一性,同时由于要求被成像物体有严格的边界,也决定了其只能适用于孤立物体成像.早期的CDI 采用支撑域约束,采集单次曝光的衍射图样就能实现样品的成功恢复,但是也只能对孤立物体,这大大限制了其应用范围.
2004 年,Rodenburg和Faulkner[54]追溯了Hoppe 早期的工作,提出叠层扫描成像迭代引擎(ptychographic iterative engine,PIE)算法,有效地克服了孤立样本限制和像模糊问题.叠层扫描成像用光探针依次对样本的不同部位扫描照射,前后两次照射保持一定比例的样本被重复照亮,并同时记录衍射强度,依靠衍射强度约束和重叠扫描约束,进行迭代运算,最后收敛到真解.重叠扫描约束是利用样品被重复照明部分的唯一性,保证收敛过程指向样品的真值.类似前述传统单次CDI 采样分析的思路,重复照明的作用相当于增加限制条件(方程的个数)的同时样品的像素数(未知量的数目)没有增加,从这个意义上只要保证过采样率σ>2,方程组有确定的解,考虑到噪声等不可控因素,一般需要控制前后两次照射有60%区域的重复,相位的恢复重建可以得到保障.使用叠层扫描CDI或Ptychography,成像对象不再要求是孤立样品,可以实现复杂扩展物体的全场成像,同时由于有更多的信息量,可以得到比单次CDI 更高的分辨率.CDI 成像的应用范围得到了大幅度扩展.
在Ptychography 中,要重建出样品空间信息,除非探针是已知的,否则还必须考虑扫描探针本身结构的影响,使问题变得复杂起来: 一方面要解决衍射测量图相位丢失的问题,另一方面还要将衍射图中以卷积形式混杂在一起的探针信息和样品信息解耦,分别重建样品和探针.2009 年,Maiden和Rodenburg[70]提出了改进的PIE 算法(extended ptychographic iterative engine,ePIE),在未知探针的情况下实现相干成像,实现探针和样品同时重建.
当完成衍射图样记录之后,采用ePIE 算法可以对样品和光探针进行重建,这需要从大量的衍射图样中采用迭代算法重构出丢失的相位.在Ptychography 恢复算法中,样品空间的约束条件不再取决于样品的轮廓信息,而是相邻近扫描位置间光斑在样品部分区域要有重叠,对重叠区域样品波函数一致性的要求构成了一个强约束条件.图8 给出了ePIE 思路和典型的算法的流程: 将样品O 固定于一个二维平移台上,探针P 经过小孔照射到待测样品上,传播距离D后到CCD 平面.让二维移动平台在x-y平面内平移完成对样品测量区域的扫描,保证相邻两次扫描之间的扫描区域有部分的重叠并记录衍射图.每幅衍射图对应于特定的扫描位置.图8 上半部分示意了相邻4 次扫描对应的照明区域.通过扫描记录了一系列扫描位置对应的衍射图像,为下一步的迭代过程提供用于强度约束的衍射数据.在恢复的过程中,首先对待测样品O和探针P 进行初始化,分别定义为 O0和P0,然后开始迭代.迭代过程由第i次结果对样品i+1次Oi+1(x)和探针Pi+1(x)更新的步骤如下:

图8 扫描相干衍射成像示意及迭代原理(ePIE)(制作本图及图17 参考了文献[71])Fig.8.The iterative principle of Ptychography(ePIE),Fig.8 and Fig.17 reproduced with reference to ref.[71].

7)重复迭代计算过程1)~6),直到误差函数Qi足够小,完成迭代过程.
利用叠层扫描提供大量的数据冗余,可大幅度提高收敛的速度,抑制噪声,使得相位恢复算法取得了前所未有的成功,这也促使人们思考利用层叠扫描获取更多有用信息如瞄准误差、三维空间信息等的可能性.基于叠层扫描,衍射成像技术在厚样品三维结构、超分辨等领域快速发展.2012 年,Maiden等[72]研究了厚样本的三维结构重建问题;2013 年,张福才等[73]采用自动修正位置误差重建探针精确扫描位置,优化重建的结果;2015 年,郑国安等[74]将叠层成像思想拓展到频域的超分辨率显微成像技术(FPM),实现了光学显微境的超越衍射极限分辨率的图像重建.这些工作充分利用数据的冗余,把“重叠扫描(Ptychography)”概念的内涵发挥到了极致,CDI 技术取得了极大的成功.
4 基于HHG 光源的CDI 的纳米成像技术
如前所述,相比同步辐射和自由电子激光等大型光源,HHG 结构简单,使用灵活,易于系统集成和小型化,非常适合用在EUV/SXR-CDI 技术,如图9 所示.随着HHG 光源技术的成熟,其已经被成功地应用于CDI 成像.如今,HHG-CDI 技术尤其是扫描HHG-CDI(Ptychography)发展迅速,不断取得突破,先后实现了反射式Ptychography 技术[16]、强制模式探针算法MEP[20]、重构绝对相差透射率/反射率RAPTR-CDI 方法和基于角度扫描的射叠层扫描CDI 技术等.后来,针对HHG 宽谱和超快的特性,人们考虑将多模态技术、多探针技术和时间分辨技术引入到HHG-CDI 中,这将进一步提高HHG-CDI 的成像质量和成像速度,拓宽应用范围.目前,利用EUV/SXR 对样品穿透和反射特异性的特性,已实现了对扩展样品、准周期性样品的CDI 成像,覆层下结构的化学特异性成像[75],并首次成功同时获得了纳米器件的3D 形貌、化学成份和掺杂浓度信息[30].至此,HHG-CDI 成为一种兼有透射和反射成像模式,对周期样品和非周期样品均可适用的纳米成像技术.HHG-CDI 作为一种新型、多功能、无损伤纳米成像技术,仍在飞速地发展中,假以时日,成像能力将比肩于目前广泛应用的电子显微镜、原子力显微镜以及量子隧道扫描显微镜等主流的技术.下文将针对在HHG 光源上应用的几种独特的CDI 成像技术进行深入介绍.

图9 HHG-CDI 纳米成像系统Fig.9.The coherent diffraction imaging system for a HHG extreme ultraviolet laser source.
4.1 叠层扫描CDI 的探针振幅约束(MEP)成像技术
对于周期性的样品成像,如半导体芯片,由各种复杂的结构组成,由于这些结构的衍射图案缺乏多样性,导致相位恢复算法的收敛性较差,衍射强度集中在一些孤立的峰,样品和光探针之间的串扰将产生伪影,周期样品的相位通常有 π 的不确定性,这对衍射成像的精确度构成了挑战.基于HHG 光源开发的探针模式强制约束(MEP)的叠层扫描CDI技术[19]可以应对这一挑战,它能够对周期性物体进行稳健的重建.实验表明MEP 结合叠层扫描方法可以应用于非隔离样品全视场成像,有效克服样品周期型结构带来的成像模糊,实现亚波长的分辨.
MEP 方法是使用前述的Ptychography 方法先完成扫描,然后将样本移出EUV 光束路径,在探测器上收集直接HHG 光探针的单一衍射图像.图10 给出了MEP 算法的原理.MEP 的Ptychography 实验由两个数据采集步骤组成.在第一阶段,HHG 探针对样品进行逐次扫描,以收集Ptychography 数据集.在第二阶段,通过将样品移出,在探测器处直接收集探针光束的衍射光.探针约束是利用探测平面上测量到的探针强度PI(u),作为先验信息对Ptychography 的收敛过程增加新的约束,其中u是探测平面上的空间频率坐标向量,该方法可以在多种不同相位恢复的技术中实现.

图10 Ptychography 算法中MEP 约束的流程示意图[19]Fig.10.Schematic layout of the MEP constraint within the ptychography algorithm[19].
在每次迭代时,将更新后的探针振幅传播到探测器平面,由PGj(u)F[Pj+1(r)] 对探测器上的光探针进行猜测,其中Pj+1(r)为更新后的探针,r为样本平面上的空间坐标向量,F是从样本平面到探测平面的传播子,PGj(u)是探测平面上的探针的猜测.这里对探针重建应用模量约束:

这个模约束探针的猜想被传播回样本平面,形成进一步更新探针的猜测:F-1[PMj(u)],用测量探针强度约束.然后把新的猜测探针反馈到算法中.
MEP 约束为 Ptychography 算法提供了探针的额外信息,从而提高了收敛速度.使用MEP 的效果非常明显,如图11 所示,当不应用MEP 方法时,在重建图像中可以看到由条纹表示的振铃伪影,不但保真度低,而且样品物与探针之间存在串扰;使用MEP 方法后,成像效果大大改善.
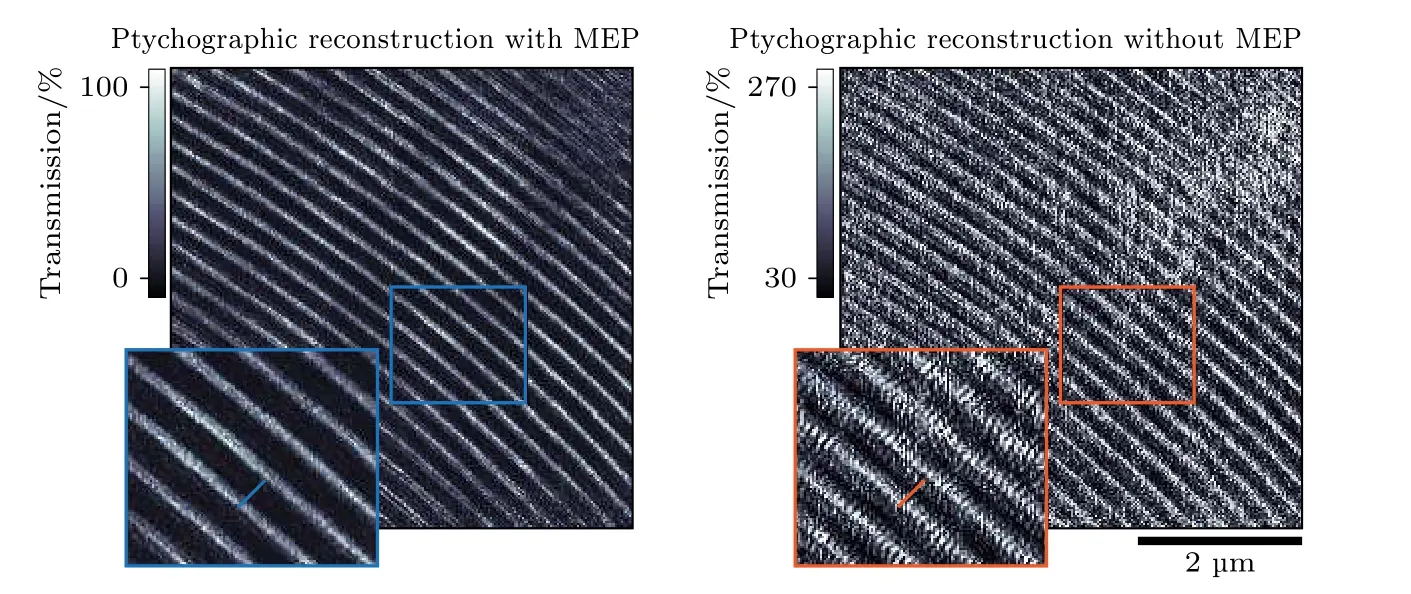
图11 MEP 约束获得Ptychographic 重建和无MEP 约束的波带片Ptychographic 重建比较[19]Fig.11.Comparison of Ptychographic reconstructions with MEP constraint and without MEP constraint for Zone Plate samples.[19].
由于MEP 约束提供了探针的定量信息,增加了数据冗余,提高了算法在存在噪声情况下的鲁棒性,减少了样本和光照之间的串扰造成的伪影,可以对周期物体成像,而且收敛过程中迭代的次数明显减少.在文献[19]中,使用HHG 光源采用MEP技术取得了很好的结果: 一是实现了对扩展、周期性样本的高质量成像;二是实现了极紫外光波段的空间高分辨率成像,获得了0.9λ的分辨率的图像.他们利用MEP 实现亚波长的空间分辨率成像,与阿贝原理通过数值孔径理论分析得到的结果一致.该技术在半导体芯片检测领域开辟了一种新型的高分辨率的光学检测方法.
4.2 大角度反射式相干成像
在纳米科学和纳米技术中,材料的表面性质非常关键,如在催化、能量转化或纳米电子学中,对表面形态的探测成像至关重要.为了满足前沿研究对表面结构的高分辨3D 成像的需要,必须采用反射式成像;此外,在EUV和软X 射线波段的HHG 在样品表面的反射率极低,因此需要采用大角度(掠入射)反射式成像模式.大角度反射式相干成像技术在表面科学和半导体材料领域有很大的应用潜力.
在大角度反射时,CCD 上采集的衍射图案不能直接用于相位恢复算法,需要做一个倾斜矫正(tilted-plane correction,TPC),用以获得和正入射相当的衍射图案,才能调用相位恢复算法实现成像.对于平面试样,可以简单地使用二维插值.对于三维样本,需要进行三维插值[76].倾斜矫正可以借助于Ewald 球的概念帮助理解.Ewald 球是在倒易空间中表示晶体衍射方向的重要概念,如图12(a)所示,利用Ewald 球可以把抽象的衍射规律形象化地表示出来.在晶体衍射中,凡是倒格点落在Ewald 球上的点和原点的连线都代表一种可能的衍射方向.在CDI 中,如果样品没有晶体的周期结构,倒空间中不再是周期排布的点阵,可以是一种连续的分布,但是在Ewald 球仍然可以用来表示衍射.这时在Ewald 球上倒空间的“格点”也将是连续分布,它代表反射(衍射)的某一空间频率的强度分布,从球面投射到CCD 平面会发生畸变,且大数值孔径和倾斜入射时畸变更严重,远场散射图案不再满足样品空间的傅里叶变换要求.
以下简单介绍一下TPC 的原理: 在反射模式CDI(透射倾斜入射亦如此)中,为了在数据分析中使用快速傅里叶变换,必须将衍射图样重新映射到样本对偶的空间频率的线性网格上,即做倾斜平面校正.如图12(b)所示,样品平面围绕y轴旋转了一定角度α,这种情况下,(9)式在探测器的坐标系中仍然有效,但是与q相关联的坐标系不再是原来的r′,而是旋转后的坐标系r′′.为此,在样本坐标系(x′′,y′,z′′)中重写q.这相当于q旋转—α:

其中
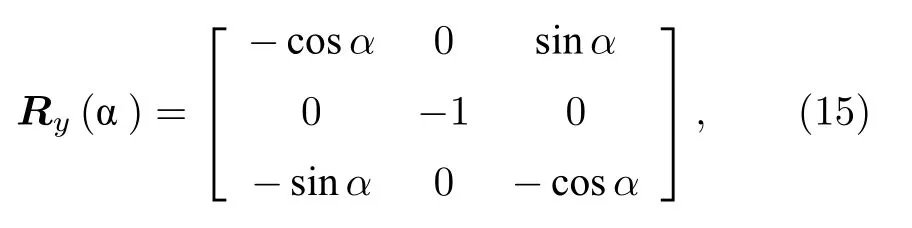
其中Ry是关于y的三维旋转矩阵,一般情况下可以通过进一步的旋转得到,允许样品平面相对于检测器平面处于任意方向:

Seaberg等[15]首先完成了反射模式HHG-CDI实验.如图13 所示,他们设计方案完成了金属纳米柱阵列成像,可以探测到约100 nm 分辨率的金属纳米柱阵列.为了获得高空间分辨率,反射成像往往需要高数值孔径,这时非零入射角会使散射图发生明显畸变(图13(a)).通过前述的坐标变换方法来校正这些失真,产生了与纳米阵列的实际傅里叶变换成比例的图案(图13(b)).对校正后的衍射图中每个峰值的强度值进行采样,并将其放置到一个新的、粗糙的网格上,产生一个过采样的衍射图,该衍射图代表平均色谱柱的傅立叶振幅.

图13 反射模式相干衍射成像 (a)CCD 上的实测衍射图;(b)采用校正算法,提取图(a)中每个衍射峰的值,重采样衍射图;(c)重建显示所有照明柱的平均值;(d)类似柱状结构的原子力显微镜图像[15]Fig.13.Reflection-mode coherent diffraction imaging: (a)measured diffraction pattern on CCD;(b)resampled diffraction pattern in panel (a);(c)reconstruction showing the average of all illuminated pillars;(d)atomic force microscope image of similar pillar structures[15].
大角度反射式CDI 在HHG 光源上首次取得突破后,迅速得到了推广,运用到HHG,SRS和XFEL 光源中.借助于倾斜入射校正方法,全场反射模式相干成像得以开展.在反射式HHG-CDI中,样品表面被照亮,探测器直接记录表面扫描时的衍射图案,然后将传统的CDI 或Ptychography重建过程与倾斜平面校正相结合,就可以正确获得具有振幅和相位信息的图像.特别是结合弯曲波前的叠层扫描与倾斜平面校正,成像质量和细节已经可与扫描电子显微镜、原子力显微镜图像相当(图14).
图14 所示为使用ePIE 重建方法在反射情况下记录的散射数据,给出最后得到的样品图像和探针.重建的样品如图14(d)所示,重建的样品和SEM电镜结果(图14(b))对比显示出反射CDI 重建的高保真性.重建的光探针如图14(c)所示,重建的光探针与探测器上直接测量的入射光斑完全一致.
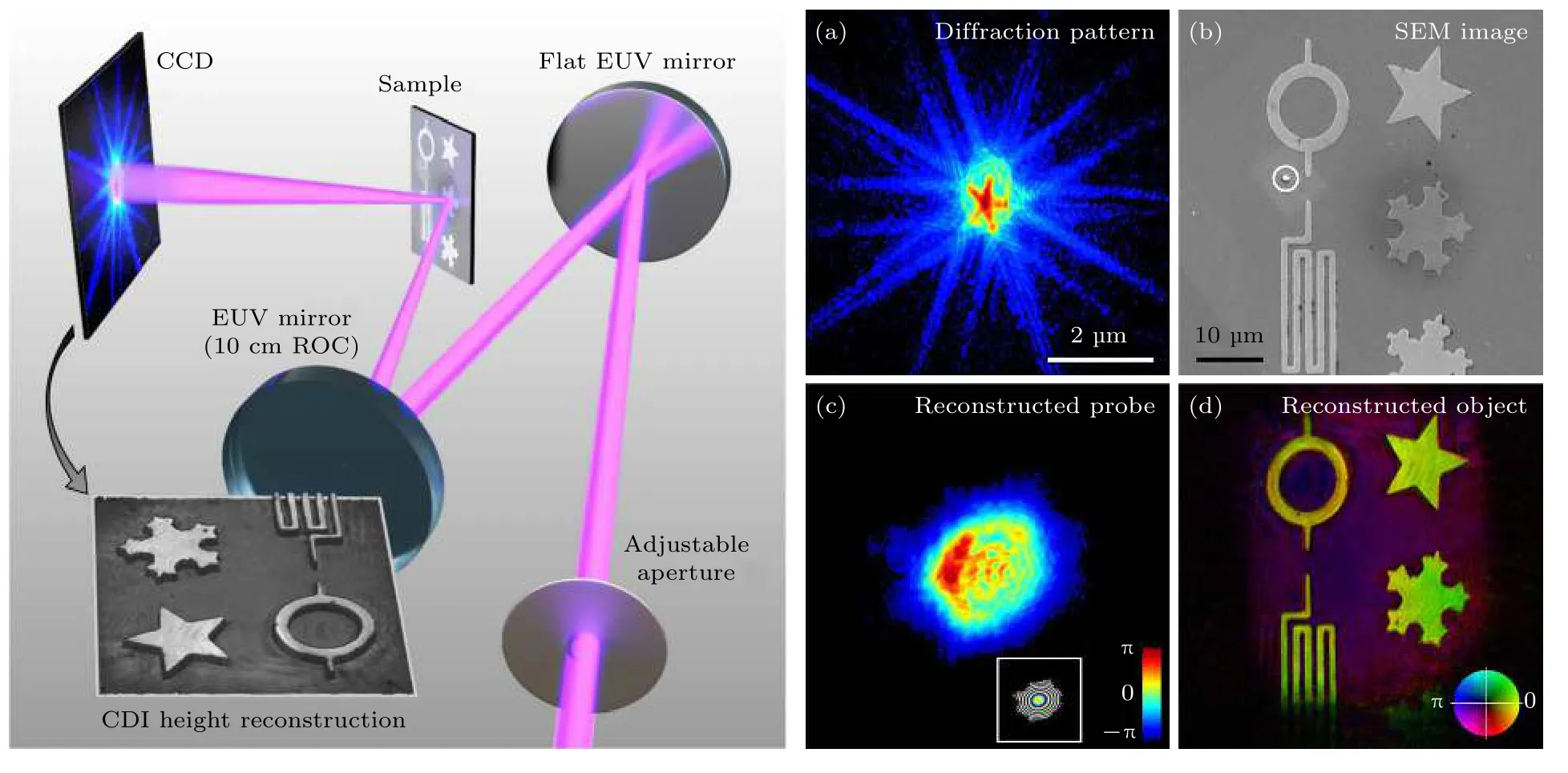
图14 实验装置、衍射数据和Ptychography 重建结果 (a)90 次扫描数据集的代表性衍射图样;(b)SEM 像;(c)探针重建;(d)样品重建[16]Fig.14.Experimental setup for reflection-mode ptychography,diffraction data and ptychographic reconstruction: (a)Representative diffraction pattern taken from the 90-scan dataset;(b)SEM image of the sample;(c)reconstructed amplitude of the HHG beam;(d)Ptychographic reconstruction of the object[16].
反射式Ptychography是一种有广泛应用前景的高分辨3D 纳米成像技术,其强大的成像能力将给纳米科学和技术带来非常广泛的影响.该方法消除了对数值孔径、样本或角度的限制,使一般扩展物体可以在任何入射角上以反射模式成像.不但可以实现与AFM和SEM相媲美的精度,还消除了样品光照不均匀或对样品绝对位置不确定的负面影响.在反射叠层扫描CDI 中,其分辨率仅受波长和系统的数值孔径的限制,可达理论极限.
4.3 基于泵浦-探测的HHG-CDI 频闪成像技术
Karl等[24]结合叠层扫描CDI 技术和飞秒HHG光源,首次用泵浦-探测的方法对在硅衬底上的镍纳米结构和瞬态加热的激发的热冲击力声波的动态过程实现了CDI 频闪成像.实验要求声学和热动力学是完全可逆的,且泵浦中期远大于样品的弛豫时间,事实上,任何可逆的动力学过程,都可以使用这种方法.样品的动态响应都是通过收集激光泵浦和探测脉冲之间不同时间延迟下的衍射图像来实现.这项工作代表了短波长CDI 实现的空间高分辨率与超快HHG 的时间高分辨率的首次结合.如图15 所示,样品在红外飞秒 “泵浦” 脉冲激励下,将飞秒EUV “探针” 脉冲打在样品(与泵浦脉冲)同样的位置,在不同泵浦和探针脉冲时间延迟下,记录镍线纳米光栅在Si 衬底上产生的相干衍射条纹.通过恢复算法重建样品,获得了硅基镍纳米结构中的热膨胀系数和表面声波传播速度.并获得全场动态成像,直接可视化纳米尺度声波的传播,轴向分辨率为0.1 nm,横向分辨率为90 nm,时间分辨率为10 fs(图15(c)).

图15 (a)频闪CDI 动态成像实验布局示意图;(b)在每个时间延迟时,用Ptychography 获得样本的图像;(c)不同时间延迟下动态成像实验;(d)硅基镍纳米线的衍射图;(e)衍射效率作为泵浦探测延迟时间的函数的瞬态信号图[24]Fig.15.(a)Schematic of the experimental layout for dynamic imaging on a tabletop;(b)tt every time delay,the image of the sample is obtained with Ptychographic CDI;(c)general concept of dynamic imaging experiment;(d)diffraction pattern of the Nickel lines on Silicon;(e)plot of the transient signal from diffraction efficiency as a function of pump-probe delay time[24].
利用频闪HHG-CDI 成像的方法记录泵浦光照后不同时间延迟的纳米结构的形态变化,捕捉到了单个纳米天线以及基板中的热和声学动力学过程,直接提取声波在均匀镍纳米天线中的色散[32].这种纳米结构形状无法从第一原理建模,因此动态成像是可视化复杂的热和声响应的有效方法.
图16 给出了由桌面高谐波 EUV HHG-CDI显微镜的动态过程示意图.动态响应是通过收集和泵浦有不同时间延迟的探测HHG-CDI 频闪图像来获得的.在每次延迟时刻,HHG-CDI 从多个重叠视场收集衍射图案,以ePIE 的方式重建样品和和探针的幅度和相位.图16(a)是频闪CDI 显微镜动态成像实验装置原理图.振幅图像仅对材料成分敏感,而相位图像对材料成分和表面形态都敏感,因此利用相位图像可获得二维(2D)+1 重建,即二维横向全场图像与一维轴向(地形)信息相结合,利用测得的位形相,可以直接转换为高度差,从而生成样品的2D+1 图像,很好地区分纳米线和硅衬底.图16(b)和图16(c)是在泵浦脉冲到达之前的锥形纳米天线的振幅图像和2D+1相位图像.图16(d)—(i)记录了在每个时间延迟纳米线和基板之间相对相位的变化,反映镍纳米结构热膨胀和随后声波在基底中传播的重建快照.一系列不同时刻的重建图再现了声波在纳米天线中的传播及热传输.为了检验显微镜的时间分辨图像,他们将该新技术与其他成熟的成像方式进行了对比,验证了技术的可行性,还模拟了和实验相似尺寸纳米结构的动力学过程,在相同的时间尺度看到了与实验定性一致的结果[25].

图16 单个纳米结构中声波的动态成像.(a)频闪CDI 显微镜动态成像实验装置;(b)重建样品振幅图像;(c)重建样品相位得到的高度图;(d)—(i)重建镍纳米结构热膨胀和随后声波在基板中传播的快照[32]Fig.16.Dynamic imaging of acoustic waves in an individual nanostructure: (a)Stroboscopic CDI microscope for dynamic imaging;(b)reconstructed quantitative amplitude image;(c)height map of the sample obtained from the reconstructed phase image;(d)—(i)ieconstructed snapshots of the nickel nanostructure thermal expansion and subsequent propagation of acoustic waves in the substrate[32].
泵浦-探测HHG-CDI 通过频闪实现了纳米尺度动力学的全场成像,利用纳米尺度的空间分辨率和飞秒尺度的时间分辨率对热膨胀和声动力学动态成像的尝试,证明了频闪CDI 能够实现纳米量级的空间分辨和飞秒的时间分辨,使人们能够在纳米世界内的空间、时间尺度上直接观察,加深对这些纳米级动态现象的理解,深化了人们对纳米和量子材料或器件中诸如相变、电荷转移、能量输运、热传导和激波形成等的微观动力学过程的认识[77].
4.4 多模态叠层扫描Ptychography
严格地说,HHG 超短脉冲是部分相干光.当脉冲短到飞秒和阿秒时,HHG 有扩展很宽的频谱.如果按照完全相干光的CDI 算法来处理部分相干光衍射图样,可能无法收敛到真解;为了提高相干度,不但需要EUV和X 射线波段复杂的分光、滤光装置,有效光子通量也会大大降低,反过来又影响了成像的质量.为了有效利用光通量,同时又不影响成像的质量,实现高分辨率成像,有必要研究部分相干光CDI 成像的问题.对此,Spence等[78]指出衍射强度的香农采样要求相干宽度约为物体横向尺寸的两倍,而探测器像素的线性数量确定了光束中所需的能量扩散(单色性).
部分相干光是包含了多个完全相干光模式的混合,若事先知道部分相干光的信息,可以通过分析各个模式的衍射,利用它们的非相干叠加,重构约束条件,实现样品高质量重建.2009 年,多模态叠层扫描CDI 首先在空间部分相干光的CDI 上取得突破[22],他们在探针光的空间相干特性已知的前提下,重建了样品,引入相干态分解的概念,降低对光探针高相干度的依赖.2011 年Abbey等[79]研究了基于时间部分相干光光源的CDI 算法,并首次在实验上实现了多色光的CDI(polyCDI).
2013 年,德国学者Thibault和瑞士学者Menzel[23]把量子混合态的概念引入到CDI 成像中,认为低相干度光探针、样本运动、记录设备误差等降低成像质量的干扰因素都可用"多种状态的混合"来描述,一般情况,光源、样品的多模性和探测器点扩散效应,导致衍射斑也是多个衍射模式的强度叠加,理想的单模CDI 可以认为是多模态CDI 的一种特例.2014 年Batey[80]首次展示了信息复用叠层扫描CDI 的(ptychographical information multiplexing,MIP)方法,考虑了多态混合样本或多模光探针情况下的叠层成像问题,利用单次记录,同时对多个样本状态重建.
这些方法共同思路是通过原始的衍射图样,同时重建多个特定的探针-样品组合的模式的响应,独立地解决了每套模式的相位问题.利用样品对不同模式的入射光的差异响应来实现“分别”的相位恢复,可以实现叠层扫描CDI 中的信息复用,大大提升样品重建的质量.
4.4.1 空间部分相干光CDI
以下简单介绍基于多模态叠层扫描Ptychography 探针部分相干光的混合态分解算法的原理.如果样品被一个部分相干的准单色光场照明,设其互强度(MOI)分布为J(r1,r2),则其在远场的强度分布为[81]:

相干理论表明,J(r1,r2)有下面的形式:
其中ψn(r)是第n个非相干的正交模式µn模式的比重,N为总的模式数,N=1 对应于全空间相干.衍射图样表示为

这样实际的衍射图样是个模式的非相干叠加(强度叠加).所以,如果知道了部分相干的入射光的互强度MOI 信息,可由此构造部分相干光相干衍射成像的迭代过程.空间部分相干光多模态算法的本质是利用一个具有(18)式所描述的互光强函数的场,对离开样本的部分相干场进行估计.然后利用(19)式将场传播到探测器平面,然后利用测量到的衍射强度施加约束,调整模态的振幅并保持其相位不变.然后将占用率最高的模态从检测器平面传播到样本平面,在样本平面中实现空间约束.按照类似传统CDI 或Ptychography 的方法迭代恢复重建.
按照MIP 的思路,每个样品出射波复振幅ψklm(x)可以用一组角标,如k,l,m表示不同的迭代次数、扫描位置和模态数.将出射波投影到实测数据集上分三个步骤完成:
1)每一个出射波从物平面到衍射平面的正向传播,

2)在衍射面上实施强度约束,

3)从衍射平面到物平面反向传播到样品平面,

然后利用通常的ePIE 方法找出每一个出射波的样品和探针.
4.4.2 时间部分相干光CDI(polyCDI)
当可以忽略探测器和样品模态的多样性(当然如果是动态成像,则需要考虑样品的模态变化),不同波长成分的光在两平面间传播时,光强度分布的形状是相似的,区别是分布范围有别,和波长有相关的位移缩放关系.得到λc对应的强度分布后,其他波长成分对应的复振幅强度缩放关系(λc-Δλ)/λc也可以得到.然后进行加权求和,实施强度限制;最后做逆传播运算,回到样品平面施加实空间限制,重复迭代收敛可得样品和多模探针的准确信息,完成重建.
图17 给出了该算法的基本原理: 利用样品对不同HHG 波长或者空间模式的部分相干光的吸收或反射率,可以完美实现叠层扫描CDI 算法中的信息复用.对于多色光源CDI,假如物体的状态是单一的,将入射光分解为系列非相干模式的叠加,一般多模态CDI 的思想与此类似.对于某一λ成分的光振动从i平面到j面进行远场传播,按照波动理论有
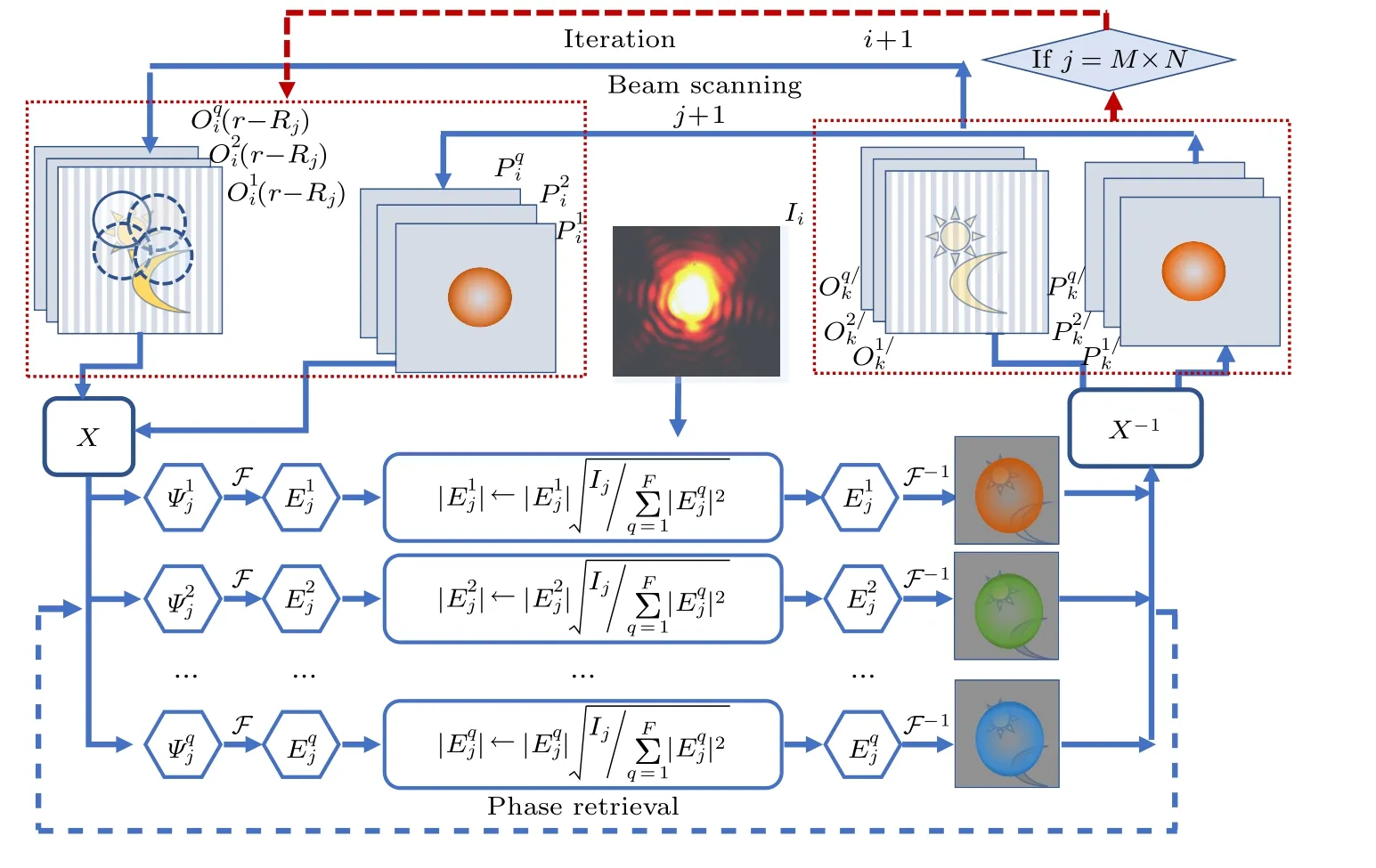
图17 部分相干光(多色光)的 ePIE 迭代原理Fig.17.The ePIE system for partially coherent light.

然后由光谱比重µλ得到传到j面处的光强分布

图18是结合HHG 的高光谱衍射成像,图18(a)和图18(b)对应6 波长透射模式,图18(c)和图18(d)对应4 波长的反射模式.将已知的入射光谱构建到重建过程中,在透射的情形中,可用通量增加了一个数量级以上,能够更好地利用 HHG 源进行衍射成像.在反射叠层图成像中,每个扫描位置记录衍射图案是4 个不同波长的非相干叠加,利用 PIM算法可以同时获得样品在每个波长处的光谱响应.该方案通过将 Ptychography 信息多路复用PIM与高次谐波HHG 光源相结合来实现.将 PIM 从先前展示的可见波长扩展到 EUV/X 射线波长,获得更高的空间分辨率和更强的光谱对比,见图18(c)和图18(d).

图18 结合HHG 多次极紫外谐波的多光谱衍射成像 (a),(b)6 波长非扫描透射成像模式[82];(c),(d)4 波长的叠层扫描反射成像模式[83]Fig.18.Hyperspectral imaging by combining multiple EUV harmonics and PIM: (a),(b)a 6-wavelength non-scanning transmission mode CDI[82];(c),(d)a ptychographic hyperspectral spectromicroscopy with a 4-wavelength comb[83].
HHG 在频域呈梳状分布,且脉宽很窄,可达到飞秒甚至阿秒量级,这么短的脉冲将使得光谱展得很宽,对于阿秒脉冲来说,Δν ≈ν,这时须考虑不同成分波长分别成像造成的位移模糊.对于这种非理想时间相干光的CDI 成像,采用宽频谱(多色光)CDI 技术,可以避免HHG 单色仪滤波带来的光子通量少的挑战,大大降低所需的积分时间.
4.4.3 空间分离探针Ptychography
在多模态Ptychography 叠层扫描中,曾经假设相互不相干的模态在样本空间上相互重叠.然而这种空间重叠不是Ptychography 算法必须要求的.因此,只要多个探针彼此不相干,就可以使用多模照相法同时对样品的不同位置成像.探针的相互非相干性可以用多种方法得到,如不同波长的探针空间分离、正交极化状态探针空间分离等.基于Ptychography 的空间分离探针技术可以同时对多个空间分离的样品位置进行全场成像.这种方式的成像允许在没有空间分辨率损失的情况下在重建图像中获得更大的视场.该技术还可以推广到几个相互相干的、空间分离的探针扫描成像,可以通过自相关滤波或混叠隐身的方法抑制相干探针之间引起的干涉效应[84].Karl等[85]首先使用可见光激光验证了这些方法的可行性,如图19 所示,多色光光栅分离多探针CDI和正交线偏振态分离多探针CDI.在图19(a)中,收集重叠、非干涉的衍射图案,利用多模态CDI 的恢复算法,对两个探测波长分别重建样本的不同区域;在图19(b)中,在正交线偏振态分离多探针CDI 中,使用硼酸钡(BBO)晶体将单个红色光束在空间上分裂成两个正交偏振态.通过在样品平面上对分离的两束光直接成像.在扫描后对收集数据用多波长分离探针相同的方式处理.

图19 探针空间分离CDI (a)对多色光进行光栅分离;(b)利用BBO 晶体对正交线偏振态分离[85]Fig.19.Ptychograpic CDI with spatially separate beams: (a)Spectral multiplexing with spatially separate beams;(b)polarization multiplexing with spatially separate beams[85].
现在可以通过对HHG 或FEL 脉冲光束进行操控,实现如多光束产生[86]、偏振控制光束产生等[87],有利于实现多模态、多探针成像.目前,已经实现了这种技术向X 射线波段的推广[88,89].利用HHG光源偏振可控制和自然脉冲串的特性,可以产生延时EUV 探针,与空间分离的多模态Ptychography技术相结合,可以构建一个空间分离、时间复用的EUV 或SXR 显微镜.
4.5 基于HHG 光源的高帧率单次曝光CDI快照技术
以下简单介绍两种可针对HHG 光源的特点优化的新型CDI 技术.这两种技术虽然还没有在HHG 光源成功实现,但是一旦成功即可以在极紫外和软X 射线波段实现高分辨率的高帧率成像.区别于前面介绍的泵浦探针CDI 技术,该技术不再要求待测样品动态过程的可逆,因此,该技术对那些不可逆的动态过程,如等离子体的超快动力学过程、量子态的塌缩和高速磁光存储介质的研究具有重要意义.
4.5.1 单次曝光 (SSP)叠层扫描CDI 成像
在传统叠层扫描CDI 中,用相干光束扫描物体,把记录的衍射图样的集合用于重建描述物体的复振幅函数.其中最关键的是每一步中的照明点与相邻点部分重叠,所以记录的信息是高度冗余的.因此,传统方法的采集时间长(>1 ms),高速的动态成像变得极为艰难.2013 年,为了打破这一限制,Pan等[26]提出了一种基于正交光栅分光法的单次曝光叠层扫描CDI 技术(single shot Ptychography,SSP)技术,在单次CCD 曝光中同时记录了来自样本多个重叠区域的远场强度图样.要求不同区域的衍射图样不能重叠,这样就大大减小了衍射图样的大小,乃至成像的数值孔径,乃至成像分辨率.此后的2016 年,以色列的学者Sidorenko和Oren等[27]提出用微孔阵列代替正交光栅分光仪的新方案.
图20(a)中给出了一个使用小孔阵列的基于4f系统的单次曝光叠层成像显微镜(4f-SSP),一组NⅹN针孔阵列位于4f系统的输入平面上.透镜L1,将阵列衍射光束聚焦在距离透镜L1后焦平面前d处(距L2d+f2,距L1f1—d)的物体上.偏离傅里叶平面位移d的空间上各个光束之间产生了部分重叠,此处的物体被来自位于4f系统输入平面的针孔阵列的多个(N2)部分重叠光束同时照明,相当于Ptychography 中的重复照明.镜头L2收集来自物体的衍射光,它将衍射场变换到4f系统输出平面上CCD 平面上的k空间域.如果物体的空间功率谱很大程度上局限于低频区域,CCD测量的强度模式由清晰可区分的块组成.每一块都包含一个衍射图案,特定针孔的光束相关联,并包含物平面上一个特定区域的光谱信息,通过远场CCD 记录的数据也被划分成几个区域,每个区域包含一个衍射图样,它与样品物体某一局部区域相关联,这样一次照射就完成了传统叠层扫描CDI多次扫描才能够完成的工作.

图20 (a)基于小孔阵列的SSP-显微镜示意图;(b)基于脉冲串照明单镜头曝光的TIMP 原理示意图[28]Fig.20.(a)Schematic diagram of SSP-microscope with ray tracing;(b)schematic diagram of TIMP based on single-shot ptychographic microscope[28].
4.5.2 时间分辨多路复用(TIMP)叠层扫描CDI 技术
利用超短脉冲的时间结构和SSP 快速成像的优势,2017 年 Sidorenko等[28,29]在SSP 的基础上,又提出了时间分辨的层叠成像(time-resolved imaging by multiplexed Ptychography,TIMP)方案,从记录在单次曝光多脉冲快照的数据,可以对样品的动态过程成像.假设物体在每个子脉冲的持续时间内是静态的,但在不同的脉冲之间可能会有所不同.假设由后续脉冲形成的衍射图案不会在时间上重叠在CCD 上,在这种情况下,CCD 记录的图样对应于不同的子脉冲对应的衍射强度的总和.在PIM 中是把探针光束的相干模式分解来研究样品的光谱响应,若SSP 的探针阵列由一串脉冲组成,利用PIM 的思想,从单个记录的强度模式可以重建对象的多个时间帧(对应不同脉冲).图20(b)给出了一个4fSSP 系统显微镜,采用脉冲串照明、单镜头曝光的TIMP.按照假设,CCD 快照记录的图样对应于每个子脉冲衍射强度图样的总和,其中每个强度图样都来自于不同的脉冲(假设CCD 积分的时间比脉冲串持续时间长),因此,CCD 在每个块上测量的强度分布为

这里I,P,O分别代表强度、探针和物体分布,m=1,2,3,···,Nx×Ny是针孔指数,k是帧/脉冲指数,F是二维空间傅里叶算子.利用高度冗余信息复用,利用多模态 Ptychography 算法 (MsPA)可以重建每个模态的帧,类似地,将 SSP 中的信息复用于脉冲串的子脉冲,可以实现时间分辨多帧超快成像.一般来说,(25)式描述的测量记录不能唯一恢复一个动态复数值物体[28].起初用形状不同的小孔阵列增加可用的信息,后来使用一组正交的探针,尝试探针和物体的唯一重建.值得注意的是,根据Plancherel 定理,正交性在传播到物体的平面后保持不变.他们使用SLM 来产生一个包含若干相互正交的子脉冲串的大脉冲照明.这时方程(25)可写为如下的形式:

文献[29]使用两种不同的编码方法来获得相互正交的脉冲:基于拉盖尔-高斯光束正交性的轨道角动量编码(OAME)和横向移动由MLA 引起的模式的相位梯度编码(PGE).通过实验演示,结合OAME和PGE 两种编码方法(为每个PGE 位移探针配备多个OAME 模式),从CCD 单次曝光中记录的衍射图样重建最多达36 帧.
文献[30]通过实验分别演示了采用轨道角动量编码OAME和相位梯度编码的探针PGE 的TIMP 方法,重建了在单镜头相机曝光中记录的多帧画面.图21 给出了使用OAME 重建9 个复数值样品和探针.尽管实验得到的空间分辨率很低(约300µm),帧率为60 Hz(对应于SLMs 的帧率).为提高TIMP 空间分辨率,可做如下改进: 在4fSSP中使用高钠透镜、利用基于编码孔径的SSP和利用HHG 的短波辐射等.为了将帧率提高到太赫兹尺度,需要产生一列飞秒脉冲串,这些飞秒脉冲被一个皮秒尺度间隔隔开,每个脉冲都被调制成相互正交.这需要在技术上采用一些新思路,如可以将单个脉冲发射到多模光纤中,由于模态色散,单脉冲被分裂成一列脉冲,每个脉冲具有不同模态[90].

图21 使用OAME 重建9 个复值对象和探针 (a)单架照相机抓拍所记录的强度图样;(b)重建帧复值对象和探头,每帧分为4 个区域(如第一帧):左上为物体振幅,右上为物体相位,左下为探头振幅,右下为探头相位[27]Fig.21.Reconstruction of 9 complex-valued objects and probes using OAME: (a)The intensity pattern recorded in a single camera snapshot;(b)reconstructed frames-complex-valued objects and probes.Each frame is divided to 4 quarters (as marked on the first frame): top-left is object amplitude,top-right is object phase,bottom left is probe amplitude and bottom-right is probe phase[27].
和前面提到频闪方法的动态CDI 在不同的时间延迟下反复记录和读出不同,TIMP 继承了SSP曝光一次的优点,它不要求变化样品的动力学过程完全可逆.TIMP 将不同子脉冲串的衍射强度非相干叠加,通过算法实现各延迟时段的图像重建,所以能支持不可逆过程的动态成像.到目前为止,SSP和TIMP 只在可见光范围实现了成像.合理利用高次谐波(HHG)产生飞秒、甚至阿秒量级的极紫外(EUV)和软X 射线脉冲序列,将会对研究物质的微观运动如量子态的变化等重要的基本动力学问题带来极大的便利,因为这些过程的特征时间尺度大都在飞秒和阿秒量级.
4.6 角度扫描的HHG-CDI相敏成像技术
纳米器件的功能通常由纳米界面的结构和化学掺杂组成来实现,不过目前对于这些纳米结构的研究都基于有损伤的电子或者机械探针等介入式的显微探测,因此无损的光学成像技术为更佳的研究手段.HHG-CDI 技术,借助于HHG 短脉宽、宽光谱的特点,类似于椭偏仪的原理通过采集多个不同入射角的叠层扫描衍射图样,能够对纳米器件的3D 结构和化学组分无损伤、高保真成像,因此具有电子束和扫描探针的显微技术所不具有的独特优势[30].
此外,HHG 光源还可以穿透可见光和电子不能穿透的材料,能够成像被掩埋于金属膜之下的结构[75].通常硬X 射线适用透射模式成像,而对于软X 射线和EUV 来说,当大角度入射时,大多数样品同时具有较高的反射率和足够的透射深度,能探测样品表面和界面的材质和结构,图22 给出了使用重构绝对相差反射率CDI (RAPTR-CDI)方法对覆层下结构的成像结果.更重要的是,结合叠层扫描CDI 算法恢复的相位,可以精确地获得样本界面的复反射率(或复透射率),而复反射率尤其是其相位对化学成分非常敏感(图23),这使得在扫描入射角度或改变入射光在样品上的波长时,可以唯一地确定样品的组成,因此可以通过此方法确定样品的化学组成.
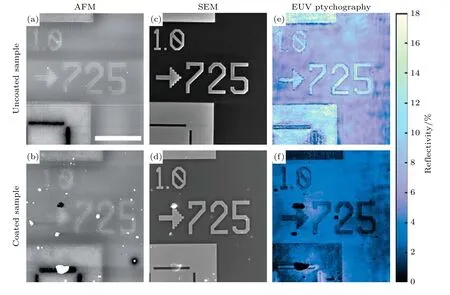
图22 未涂层(顶行)和铝涂层样品(底行)的 EUV Ptychography 图像.作为比较,AFM 图像和SEM 图像也在图中显示[75]Fig.22.EUV ptychography images of the uncoated (top row)and Al-coated sample (bottom row).AFM images and SEM images are also shown as comparisons[75].
HHG-CDI相敏成像技术是基于HHG 光源的相位稳定性、不同样品材料对光波独特的反射和透射相位的敏感性,结合CDI 算法的相位恢复功能,最终实现样品表面形貌、层厚度、界面质量、掺杂剂的浓度及分布的无损探测成像技术.具体在实验上,为了实现相敏反射成像,首先需要HHG 光源的功率、相位、波长等参数均非常稳定,在不同入射角,记录样品反射的叠层扫描数据的多组数据.衍射图像会随着样品的组成、探针的波长和入射角的变化发生变化.扫描过程中,随着样品组分及其分布的不同,衍射的特征对比度会发生变化.然后在不同入射角度和波长条件下实现图像重建,得到每个角度和波长下样品复反射率的定量图像,形成不同样本区域的反射率曲线.在图23(a)所示的实验中,使用了单一的29.3 nm 的波长HHG,通过改变入射角(从掠射角算起分别从21°依次增加1°到25°)并记录散射强度,然后利用记录数据完成重建.
图23(b)和图23(c)是使用相同数据集进行重构样品的相位重建图,其中 图23(c)采用的是3D倾斜平面校正和一种全变分正则化方法[91],图23(b)没有经过优化,可以看出,经过优化处理的重建结果具有更清晰的结构边缘和更高的保真度.
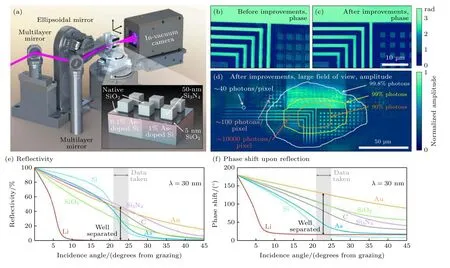
图23 纳米结构成像 (a)幅值和相位敏感成像反射仪的原理图;(b),(c)实施3D 倾斜平面校正和全变分正则化处理和未作相应处理的相位重建;(d)宽视场振幅重建;(e)(f)材料的特征反射率与角度曲线—EUV 光对材料成分的敏感性[30]Fig.23.Experiment overview and nanostructure imaging: (a)Schematic of the amplitude-and phase-sensitive imaging reflectometer.Zoom-in of EUV ptychographic phase reconstructions of the sample,(b)before and (c)after precise implementation of 3D tiltedplane correction and total variation (TV)regularization.(d)Entire,wide field-of-view amplitude reconstruction.(e),(f)Characteristic reflectivity versus angle curves for several materials,showing the sensitivity of EUV light to material composition[30].
对于记录的一系列样品复反射率的图像,可以采用分割图像来处理,计算样品不同区域的相位作为入射角的函数,采用深度学习或遗传算法可以研究样品的材料组成[30].利用复反射率的图像数据,对不同角度相位图像进行配准和分割,计算样品不同区域之间的相位跃变和入射角度的函数关系,可以反映与深度相关的化学材料组成.在完成不同区域和深度相关的化学组分重建以后,综合这些结果可以形成样品表面界面形态和组分的表征,得到与膜层、界面质量和掺杂剂浓度相关的参数.
图24 给出了反射相敏成像技术对一般样品的三维化学成分进行无损成像的能力,重建的不同纳米图案区域(高掺杂结构以及高掺杂和低掺杂衬底)的组成和深度如图24(a)—(c)所示(高(a)掺杂结构、(b)低掺杂衬底和(c)高掺杂衬底).图24(d)为重建的形态和材质分布图,图中不同颜色对应的是在遗传算法中处理的不同材料,四种颜色每一种都代表SiO2的不同区域(SiO2在氮化硅下,钝化SiO2在氮化硅上,钝化SiO2在高掺杂衬底上和钝化SiO2低掺杂衬底上).通过与AFM 测量图(图24(f))进行比较可以看出,在成像质量上HHG-CDI相敏成像技术更有优势.

图24 空间分辨、组成敏感和三维纳米结构表征 (a)高掺杂结构,(b)低掺杂衬底和(c)高掺杂衬底中的成分与深度重建;(d)全重构样品的放大(插图);(e)Ptychography相位图像与遗传算法结果相结合得到的结果;(f)同一区域的AFM 图像[30]Fig.24.Spatially resolved,composition-sensitive,3D nanostructure characterization: Composition versus depth reconstruction in the (a)higher-doped structures,(b)lower-doped substrate,and (c)higher-doped substrate;(D)zoom-out and zoom-in (inset)of fully reconstructed sample;(e)topography map obtained by combining the ptychographic phase image with the results of the genetic algorithm;(f)AFM image of the same region[30].
角度扫描的HHG-CDI相敏成像技术可以无损地对不透明材料纳米结构表面和界面形态及与深度相关的化学组成实现高分辨率成像,该技术在量子器件、高端半导体等方面具有很大的应用潜力.
5 HHG-CDI 技术前景和挑战
表1 对比了半导体工业和科研领域几种常用的纳米成像技术.HHG 光源与CDI 成像技术的结合开启了一种新型的纳米成像技术的新纪元.HHG-CDI 实现了成像装置的小型化和简单化,不但降低了成本,还大幅度提高了成像系统的集成度和实用性.除此之外,HHG 的短波长、高重频和短脉冲特性结合CDI 出色的样品出射波重建能力,使HHG-CDI 技术具有如下优势: 1)无透镜高分辨率成像,无需复杂昂贵的透镜或反射镜,同时也避免了这些器件的像差和色差,可达接近理论极限的分辨率;2)与电子探针相比,HHG-CDI 具有无接触、无损伤、模式灵活(透射或反射式),对样品也无需做特殊处理(如电子显微镜需要对绝缘体材料镀金属膜);3)可以同时获得样品(反射或透射)光场的3D 信息(振幅和相位),与单纯的强度成像相比可获得更多样品信息,可实现3D 成像;4)非破坏性薄膜下成像: 极紫外和软X 射线在大部分介质中都有一定的穿透力,因此可以透过表面镀膜层探测镀膜(尤其是金属膜)下的材料结构,这在半导体检测领域拥有重要的应用;5)化学成分和掺杂浓度探测: 由于随着样品不同的组分及其分布导致衍射的特征对比度会发生变化,尤其是在元素的吸收边附近,通常表现为不同材料的复吸收率和反射率有较大的差异,因此利用元素在特殊波段吸收率的差异可以探测物体的化学成分和掺杂浓度;6)时间分辨和动态过程成像: 利用HHG 短脉冲和高重频特性,使用泵浦探针成像技术和单次曝光叠层扫描CDI 实现飞秒甚至阿秒量级的快速高分辨率成像.

表1 半导体器件技术领域常用的几种纳米成像技术和相干衍射成像技术的对比Table 1.Comparison of several nano-imaging techniques commonly used in semiconductor technology.
类似于电子显微镜的发展对人类显微技术的革命性影响,HHG-CDI 技术的飞速进步,也将为多个重要的科研和工业应用领域带来一种崭新的先进纳米成像技术,在样品多维度(3D 空间、时间、成分和浓度)显微测量上带来全新体验.首先,是在纳米级的高端半导体制程中晶圆和制成品的缺陷检测上的应用.国际上多家研究机构和企业已经开启了基于HHG-CDI 的针对极紫外光刻技术中光罩表层纳米图案的光化检测技术(EUV actinic pattern mask inspection)的应用开发.该技术将在目前最先进的半导体极紫外光刻技术中起到不可替代的作用.此外,一些高科技公司和研究所也在联合开发可用于半导体器件检测的小型化CDI技术,如美国Intel 公司联合美国科罗拉多大学,韩国三星公司联合韩国ESOL 公司,以及丹麦的ASML 公司联合Delft 大学,均在合作开发商业用途的HHG-CDI 成像技术.这些合作研究的成果将大大简化叠层扫描CDI 的硬件需求和成本,极大地利用HHG 激光的特殊优势,资本的介入将驱动HHG-CDI 成像技术大规模的推广及应用.最先进的EUV 光刻技术已经实现10 nm 以下节点的芯片制作,但光刻系统中仍然采用基于电子束的晶圆缺陷检测技术,这些研究一旦取得突破,最直接的结果将是HHG-CDI 技术取代现有的基于电子束的检测系统(电子探针会带来意外损伤).
其次,生物微结构成像和生命活动在微观尺度上动态演化的观测.在生物微结构显微成像中,生物样品成像往往需要对样品预处理,如染色以增加透射强度对比,但是这样会破坏样品的生物活性,对于活体观察就失去意义,一般透光的相位变化远大于强度的变化,利用CDI相位成像可以解决这个难题.在细胞生物学、分子生物学以及形态学领域,未来基于“水窗”软X 射线甚至硬X 射线HHG光源的频闪HHG-SSP 或HHG-TIMP 能够对活体生命活动中的微结构动态演化成像,对结构和功能的关系提供更直接的观察,这将极大地拓展CDI技术在生物医学领域的应用.
最后,HHG-CDI 还可在基本物理或化学过程的研究中大显身手.将来HHG 极短的脉冲时间(阿秒)、极短的中心波长(X 射线)和较高的平均功率(微瓦到毫瓦),即可以提供足够高的空间、时间分辨率和信噪比来开展对分子、原子甚至原子核等物理过程的时间演化及瞬态相关的研究,如量子跃迁过程、分子振动过程、化学键断裂组合过程及电荷、自旋和热传输等.HHG-CDI 的成像分辨率将从目前的几十纳米和几十飞秒,到未来的亚纳米和阿秒的分辨的突破,人类对微观(如原子、原子核)世界不再局限于现有的频率空间(光谱域)的认知,将对原子甚至原子核的研究提高到真实的空间和时间尺度中来.在这样高的时间和空间分辨率下,或许将可以看到原子中静止的电子、原子核中核子的运动,观测到量子态的塌缩.这将开启人类对微观世界认知的一道新大门,为量子科学、先进材料、生物学和制药提供全新的研究手段.
HHG-CDI 技术的全面推广还面临许多挑战,可以总结为以下几点: 1)实现高光子通量和高稳定度的X 射线HHG 光源.和大型X 射线光源相比,HHG 光源的亮度、光通量和稳定度仍需要进一步提高,这些涉及到激光材料和器件的抗损伤工艺、光束稳定性控制、模块化封装和自动化智能化控制等.新激光技术、新材料的利用、新技术的开发将有助于解决HHG 的这一挑战.2)样品的辐射损伤是CDI 高分辨需要解决的一个技术难题.低光子通量下高分辨率成像目前仍然无法实现.高信噪比需要足够高的光子通量,而强光的吸收、电离及俄歇过程等会带来样品内部结构的不可逆的变化,造成破坏,如生物样品会失去活性、非生物样品的辐射损伤、甚至造成结构解体.在解决样品损伤这个难题之前,使用远超损伤阈值的超短脉冲光照样品,在样品被破坏前瞬间读取衍射图样[92],也可以弥补现有电子显微镜和X 射线显微镜的不足.3)大量数据的实时快速运算、智能化分析处理能力.生物微结构动态演化成像、极短时间分辨的物理过程的动态观测需要实时处理大量的数据,半导体材料的化学成分和浓度检测等也需要做大量的运算.新的算法如人工智能和深度学习以及开发集成了这些运算功能的芯片,为解决这一问题提供了有益的参考.4)高帧率、高动态范围和高分辨率的相机开发滞后,价格昂贵也是亟需解决的问题之一.尽管HHG-CDI 技术遇到了这些问题,但是随着科技的进步和工艺和创新,这些问题最终将会得到解决.
6 结论
经过几十年的持续发展,从最开始使用大型同步辐射光源到现在使用桌面大小的HHG 光源,CDI 已经从实验室原理验证阶段走向实际应用.HHG-CDI 技术成像方式灵活、成本低、体积小、结构简单,不但可以同时满足新一代的纳米成像对高分辨、无像差、非破坏性、非接触式、高效率、3D 成像、动态成像等要求,而且还兼具探测样品化学成份、浓度的功能,在科研和工业应用领域,尤其是在半导体成像检测领域,已经初步得到了应用.尽管在光子通量和成像分辨率方面,HHG-CDI 还无法和基于大型光源的CDI相比,半导体化学成分浓度检测、时间分辨频闪照相和TIMP 方法还无法达到工业应用水平,但是随着新材料的应用和新技术逐渐成熟,越来越多稳定度高、亮度高、效率高的 HHG 光源走出实验室,HHG-CDI 的前景值得期待.最近的实验结果已受到世界各著名大学、研究所及高科技大公司的专家和学者的高度重视,被认为是纳米结构成像最有前途的手段.HHG-CDI作为纳米成像技术卓越的后起之秀,通过结合HHG短脉冲、短波长、高相干、化学敏感等特性和CDI技术丰富的实验手段、先进成像算法,将媲美于现有的原子力、近场光学、X 射线、电子以及隧道扫描等主流显微成像技术,成为未来的纳米技术和量子技术发展中最具潜力的成像工具之一.
猜你喜欢
太阳能(2022年1期)2022-03-05
临床肺科杂志(2021年5期)2021-04-27
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
河南科技(2021年29期)2021-03-28
建材发展导向(2019年13期)2019-08-24
家庭影院技术(2018年10期)2018-11-02
电子制作(2018年8期)2018-06-26
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2017年2期)2017-11-24
