
舰船电场阵列探测相干累加信号处理方法
2022-08-30 01:50谢昌奇程锦房张伽伟
探测与控制学报 2022年4期
谢昌奇,程锦房,张伽伟,喻 鹏
(1.海军工程大学兵器工程学院,湖北 武汉 430033;2.海军士官学校,安徽 蚌埠 233012)
0 引言
舰船在海中航行时,在螺旋桨的调制作用下会在其周围生成轴频电场信号[1-2]。时域上,轴频电场信号幅值通常可达微伏每米级别的量级;频域上,轴频电场信号为低频线谱,基频与螺旋桨转动频率一致,其能量主要集中在0.5~30 Hz。正是由于舰船轴频电场信号具有传播距离远以及频率特征明显等特点,所以可以将该信号用来对水中目标探测、识别以及跟踪。
20世纪50、60年代,苏联曾经利用船舶电场这一特征信号来作为控制场制造水下武器,其中包括1957年装备的KCM型锚雷,1960年装备的YTM型深水锚雷等[3]。20世纪60年代初期,美国和加拿大等国的海军曾经利用冰山设置电场探测浮标,并且配合卫星完成了对白令海峡中船舶的联合搜索工作;20世纪末,美国海军研发出LSM智能滨海水雷;2011年意大利研制的“ASTERIA”型水雷装有静电场和轴频电场联合动作引信。随着电场引信的发展,越来越多的国家意识到通过减弱轴频电场来提高舰船隐身性能的重要性,并研究了多种减弱舰船电场的技术,例如采用主动轴接地技术来降低轴频电场信号[4-5]。
由于海水的导电性,海洋中电场信号在海水中随着传播距离的增加变得极其微弱。理论研究和实验数据发现,在1~2倍船长附近,极低频电场的幅值只有μV·m-1到mV·m-1的量级[6],再加上海上复杂的背景噪声,要想提高舰船电场的远距离探测能力,准确提取出海洋中微弱的舰船电场信号是关键。目前我国使用的电场测量系统都是一对由Ag/AgCl电极或者碳纤维电极和极低噪声的前置放大器组成。随着各国舰船电场隐身技术的不断进步,更高精度的测量系统和轴频电场检测方法对于海水中舰船电场的探测是至关重要的。为提高舰船电场探测水平,国外将电场传感器排布成阵列,与单个传感器相比,传感器构成阵列可以改进信噪比,可以比单个传感器获取更多信息。文献[7]指出通过信号处理可以提高舰船电场探测性能30~60倍,大大拓展了水下电磁场探测的空间[7]。
1 舰船电场探测原理及建模
1.1 产生机理
船舶由不同的金属材料制成,海水又是良导体,当船舶在海水中时,不同金属材料之间(如钢质船壳和铜质螺旋桨)会发生电化学反应,从而在船舶周围产生了腐蚀电流,使钢质船壳受到腐蚀。为保护船壳体不受腐蚀,现代船舶上普遍采用了外加电流阴极保护(ICCP)系统和牺牲阳极阴极保护(SACP)系统产生保护电流进行防腐。腐蚀电流和保护电流都会经海水从船壳流向螺旋桨,然后通过各种轴承、密封和机械线路从螺旋桨返回到船壳,其原理示意图如图1所示[8]。工程上,由于螺旋桨、轴承和大轴不能完全做到同轴,回路中电阻抗RB将随着螺旋桨的旋转而发生周期变化,使流经海水的电流受到调制,从而在船舶周围产生以螺旋桨转动频率为基频的时变电场信号,该电场称为轴频电场。
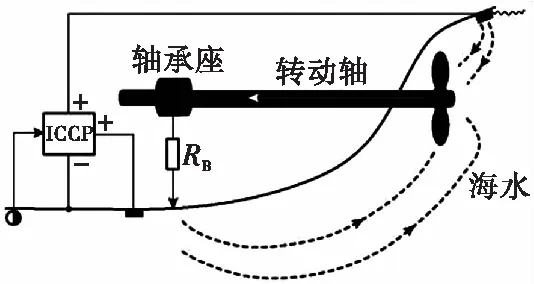
图1 轴频电场产生原理示意图Fig.1 Schematic diagram of the principle of axial frequency electric field generation
1.2 电场测量原理
某点的电场强度是通过测量两个点之间的电压来获得的,假设海水中相距为L的两个点之间的电压差Ud,则两点间的电场强度可以由公式E=Ud/L近似计算得到。因此,为了测量舰船电场强度,可以以舰船中心为原点建立舰船电场测量坐标系,x轴正方向为平行于舰船纵向由舰尾至舰首,沿x方向放置两个传感器,即可将舰船电场的x轴分量测出[9],就能得到该点的电场强度Ex。
1.3 电场传感器阵列模型
空间中位于不同方位的一组电场传感器根据一定规则放置形成的阵列就是电场传感器阵列。电场传感器可以有各种各样的空间排列方式,本文所使用的是等间距线阵列,其排列方式如图2所示。阵列测量系统主要由电场传感器、电场传感器阵列电路、多通道信号采集处理模块和电池模块组成。

图2 传感器阵列模型Fig.2 Sensor array model
目前对轴频电场建模的方法主要有时谐电偶极子模型和时谐电流元模型等[10]。利用上述两种方法建模的步骤为,在海水较浅的情况下,电磁波在海水中的传播不能忽略空气和海底对其的影响,因此把空间划分成空气、海水和海底三个区域,其物理模型如图3所示[11]。
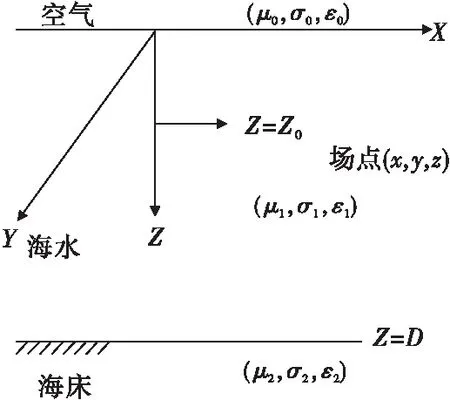
图3 海水中电磁波传播示意图Fig.3 Schematic diagram of electromagnetic wave propagation in seawater
建立直角坐标系O-xyz,其中xoy平面与水平面重合,z轴垂直于水平面并且取向下为正,水深为D,区域z<0为空气,区域0
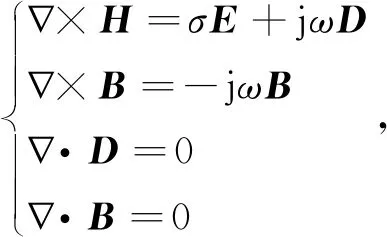
(1)
式(1)中,H为磁场强度矢量,B磁感应强度矢量,σ为介质的电导率,D为位移电流矢量,E为电场强度矢量,ω是电磁波频率。
求解上述麦克斯韦方程组即可得到轴频电场在海水中的分布表达式,有些学者提出利用时谐电偶极子来对轴频电场进行建模[13-16],为了减少计算量,文献[11]使用直流电偶极子模型代替时谐电偶极子模型对轴频电场进行建模。为了方便起见,本文省略了推导过程,直接给出结论,场点坐标为(x,y,z)处电场各个分量如式(2)—式(4)所示[11]:

(2)

(3)

(4)
其中,
(5)

(6)
(7)

(8)
(9)
(10)
(11)
式中,σ1、σ2、σ3分别为空气、海水、海底的电导率;I为偶极子强度;ld为偶极子长度。
2 舰船电场相干累加信号处理方法
2.1 原理介绍
在本文电场传感器阵列中,以第一个电场传感器为参考电极,分别测其他传感器与它的电压差U12,U13,U14,…,U1i,且
U1i(t)=s1i(t)+n1i(t) (i=1,2,3,…,N),
(12)
式(12)中,s1i(t)为各个电场传感器接收的目标电场信号,n1i(t)为噪声信号,N为电场传感器个数。
由于各个传感器到电场场源距离不一样,所测得的信号有时间延迟,将各路信号之间的时间延迟τi求出,并进行时延补偿,使各个传感器接收到的目标电场信号对齐,
U1i(t)=s1i(t-τi)+n1i(t)。
(13)
最后将对齐的电场信号进行累加,累加后表达式为:

(14)
从式(14)中可以发现,由于电场信号相关,噪声不相关,累加求平均后电场信号幅值不变,噪声幅值变成原来的1/M倍,因此累加后能够去除部分噪声。
如图4所示为相干累加原理框图。
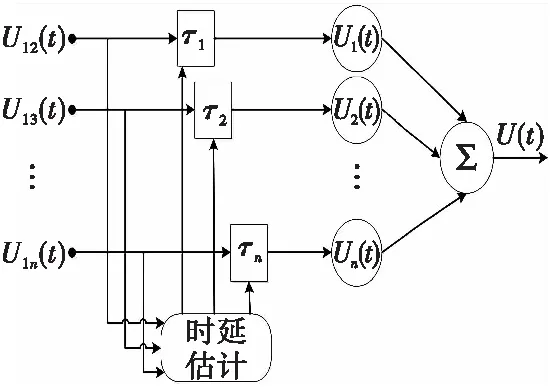
图4 相干累加原理框图Fig.4 Block diagram of the principle of coherent accumulation
2.2 时延估计方法
时延估计是用于估计各路电场信号之间的时间延迟τ,在用相干累加来处理电场信号时,时延估计是非常关键的一步,时间延迟估计越精确,相干累加去除噪声效果越明显。常用的时延估计方法主要有:广义互相关法(generalized cross correlation,GCC)、互功率谱相位(cross-power spectrum phase,CSP)法等[17]。广义互相关法是通过求两路信号的广义互相关函数来得到时延的,由于该方法计算简单,所以本文采用此方法来进行时延估计。下面介绍该方法的原理。
假设两路电场信号分别为:
U1(t)=s1(t-τ1)+n1(t),
(15)
U2(t)=s2(t-τ2)+n2(t)。
(16)
U1(t)和U2(t)的互相关函数可以表示为:
R12(τ)=E[s1(t-τ1)s2(t-τ2-τ)]+Rn1n2(τ)。
(17)
为了简化计算,一般可以认为噪声n1(t)和n2(t)是互不相关的,所以Rn1n2(τ)=0,即互相关函数可以简化为:
R12=E[s1(t-τ1)s2(t-τ2-τ)]。
(18)
当τ=τ1-τ2时,取最大值,因此可以根据互相关函数的最大值来得到信号的时延。
3 仿真及实测验证
3.1 仿真实验
采用Matlab软件对电场进行建模,主要模型参数:场源坐标为(0,0,5) m,模拟源强度I=100 A,偶极子长度ld=1 m,由于本仿真实验为了检验相干累加对信号噪声去除的效果,不考虑分层介质对电场传播的影响,因此取空气电导率σ1=0,海水电导率σ2=4 S/m,海底电导率σ3=0,正横距y=30 m,海水深度为200 m。将上述参数代入式(2)、式(3)和式(4)中计算并仿真出深度为20 m,正横距y=30 m沿x轴方向上的轴频电场Ex如图5所示。
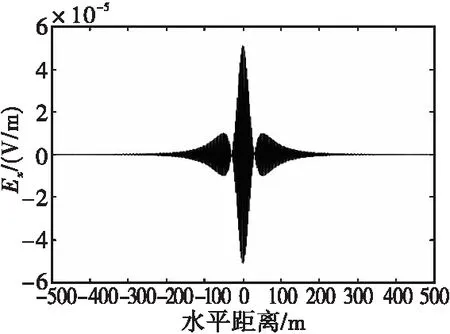
图5 Ex分量Fig.5 Ex component
为验证将多路轴频电场信号进行相干累加可以提高信号的信噪比,本仿真实验生成6路Ex信号,第1路和其他5路的时延分别为0.25、0.5、0.75、1、1.25 s。由文献[18]可知,舰船电场信号的背景噪声具有较好的高斯性,因此,分别给这6路仿真信号添加高斯噪声用来仿真在x方向上线型等间隔排列的7个传感器测得的6路电场信号,信噪比为1.026 4 dB,然后将6路仿真信号按照第2章的介绍的步骤进行相干累加,得到结果如图6、图7所示。图6为第1路仿真电场信号,图7为累加后电场信号,从累加前后电场信号波形图可以发现,经过累加后,噪声确实有所抑制,并计算得到累加后电场信号的信噪比为7.364 6 dB,信噪比提高了6.338 2 dB,具有一定的去除噪声和增强电场信号的效果。
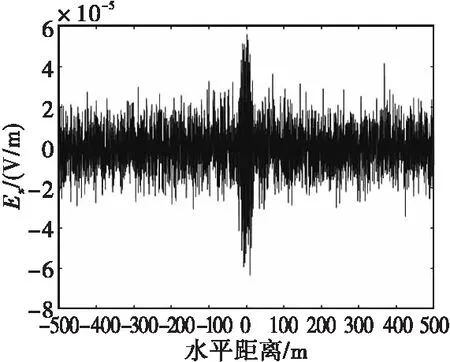
图6 加噪电场信号Fig.6 Noise-added electric field signal
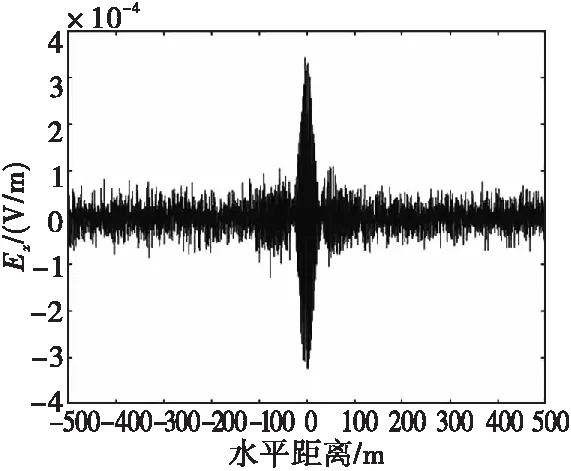
图7 累加后电场信号Fig.7 Accumulated electric field signal
3.2 海上试验数据验证
为了检验相干累加在电场传感器阵列探测中对信号去除噪声的效果,现采用海上试验实测阵列数据来进行累加,该试验将7个Ag/AgCl电场传感器沿x方向放置成直线均匀布在海底,船沿传感器布置方向航行,每两个传感器之间的间距为20 m,采样频率为250 Hz,测得6路Ex电场信号,时域图如图8所示,计算得到电场信号信噪比为-0.027 6 dB。
利用2.3节中提出的广义互相关法求出图8中6路信号之间的时延,并进行时延补偿,补齐后6路信号累加得到的信号如图9所示。通过对比图8和图9可以看出,原本在400~500 s时间段内无法看到舰船信号,经过累加后,在这个时间段内可以发现舰船电场信号,噪声有所减少,经计算累加后信号信噪比为4.577 dB,相比累加前提高了4.604 dB的信噪比。
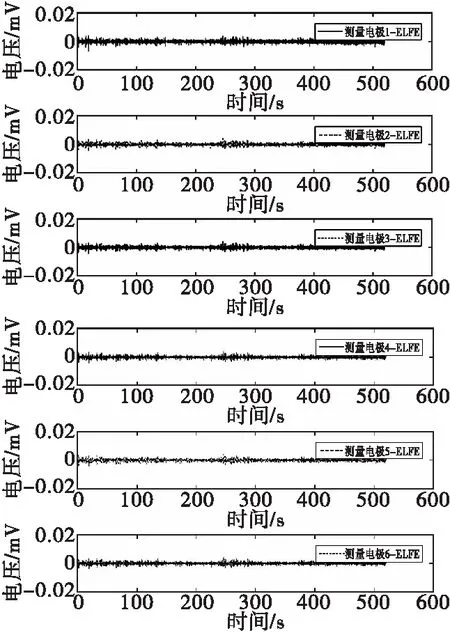
图8 原始实测电场信号Fig.8 Original measured electric field signal
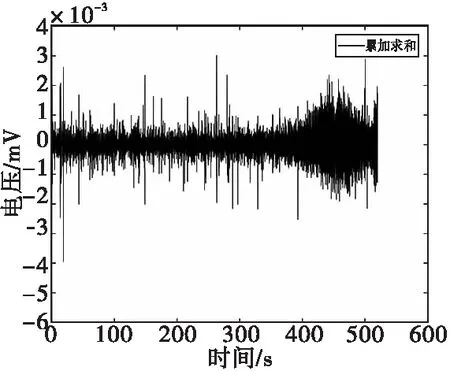
图9 累加后实测电场信号Fig.9 Measured electric field signal after accumulation
对累加前和累加后的电场信号进行频谱分析,如图10所示,图10(a)为图8中第一路信号的频谱图,图10(b)为图9信号的频谱图。通过对比可以发现,在频率小于2.5 Hz范围内,累加后噪声的频谱明显比原来下降了,在频率大于2.5 Hz范围内,噪声频谱也比原来有所下降。由上面分析可以得出,相干累加对于舰船电场阵列测量的噪声有一定的抑制作用。
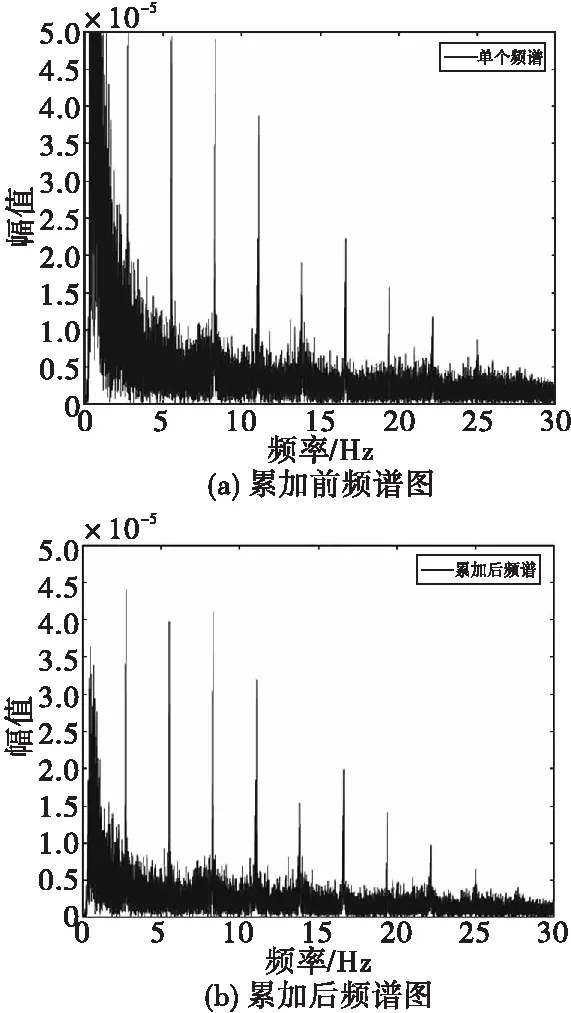
图10 累加前后频谱图Fig.10 Spectrum before and after accumulation
4 结论
本文提出一种基于相干累加的舰船电场阵列信号处理方法。该方法利用各路信号中电场信号相关而噪声不相关的性质将信号进行时延补偿后累加来达到降噪的目的。文中利用仿真实验和海上电场传感器阵列实测数据对该方法的有限性进行了验证,结果表明运用相干累加来处理传感器阵列测得的多路信号可以有效抑制0~2.5 Hz频段的背景噪声,能够提高舰船电场信号的信噪比。下一步的研究方向为将该方法与其他信号处理方法相结合,进一步提高对舰船电场的探测能力。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
现代仪器与医疗(2022年1期)2022-04-19
舰船科学技术(2021年12期)2021-03-29
新高考·高一物理(2016年7期)2017-01-23
新高考·高一物理(2016年7期)2017-01-23
科技视界(2016年11期)2016-05-23
中学生数理化·高二版(2016年9期)2016-05-14
新高考·高一物理(2015年6期)2015-09-28
现代电子技术(2015年17期)2015-09-23
