
一种用于步进电机驱动芯片的电荷泵设计*
2022-09-02 10:52宋嘉欣辛晓宁梁博文
微处理机 2022年4期
宋嘉欣,辛晓宁,任 建,梁博文
(沈阳工业大学信息科学与工程学院,沈阳 110870)
1 引言
步进电机能将电脉冲信号转换成对应的角位移或线位移[1],通常应用于3D打印机、植毛机工作台(毛孔定位)、医疗仪器及设备、精密仪器、工业控制系统、机器人等对定位有较高要求的领域[2-4]。近年来也常应用于光通信中的光纤延迟线,用来调节信号的相位和时延[5-6]。步进电机驱动芯片通常使用驱动电路对H桥进行驱动,从而使电机线圈绕组中有电流流过。H桥电路是由4个大功率N沟道增强型场效应管构成的。当H桥中的高端功率管导通时,源端电压与漏端电压接近,其大小约为系统功率电源电压,此时为了使功率管能够充分导通,需要产生一个高于系统功率电源的电压接入功率管的栅极,对H桥电路中的高端功率管进行驱动。为产生这个高压,就需要应用电荷泵电路来实现电路需求。考虑到工艺中功率管的耐压能力问题,接入H桥高端功率管栅端的电压不能无限上升,为提高电路的可靠性,还要对电荷泵输出进行监视,使之达到设定的数值后,电荷泵就停止工作。在电荷泵放电过程中,由于外界抽取电荷会使得电荷泵输出电压降低,当低于监视电压的时候,电荷泵恢复工作,对电荷进行补充。
2 电荷泵电路基本原理
电荷泵电路以电容为储能元件,应用电容电荷积累效应[7],通过开关将电荷“泵”向输出级[8],从而在芯片内产生高于正常供电电压(VCC)或低于地电压(GND)的电压[9-11]。大多数电荷泵电路都是基于Dickson电荷泵[12],采用二极管作为开关器件[13-14]。基本的电荷泵电路如图1所示。其中VCC是电源,Vin是方波时钟信号,Vo是电荷泵输出。为便于分析,忽略在二极管上产生的压降,当Vin方波时钟信号输入为低电平0时,二极管D1导通,构成VCC-D1(T1)-C1-Vin通路,T1点的电压VT1与VCC相同;当Vin上跳为高电平Vh时,即C1左极板电压上跳为Vh,由于电容两端电压不会突变,相应的就有右极板也要在VCC的基础上上跳Vh,即VT1随之变为VCC+Vh。此时D1反向截止,D2正向导通,形成Vin-C1(T1)-D2(Vo)-C2-GND回路,C1通过D2向C2注入电荷,最终Vo介于VCC与VCC+Vh之间。

图1 基本电荷泵电路
常规的H桥电路结构如图2所示。由于步进电机驱动芯片中的H桥全部由NMOS管构成,在高端功率管M1、M2导通后,其源端电压与漏端电压接近,约为功率电源VM。为使高端NMOS管导通,其栅极电压需要高于VM+VTH,所以需要采用电荷泵电路对功率电源VM进行升压。为保证高端NMOS管能够充分导通,同时M1、M2管的栅电压不超过MOS管的耐压能力,所以不能直接采用图1所示的简单结构,而是需要设计一种既能升压又能控制并且具备监视电压功能的电荷泵电路。
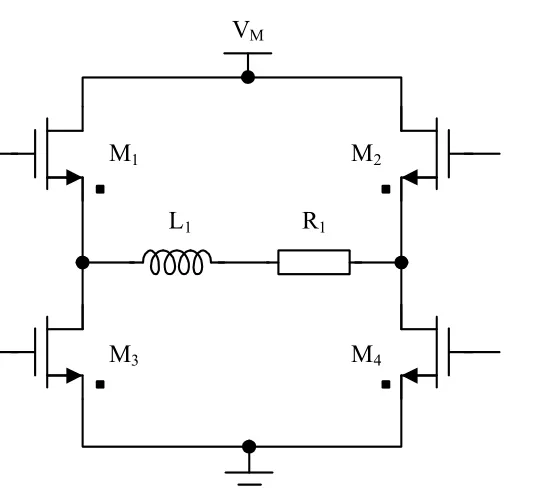
图2 H桥电路原理图
3 版图设计
设计采用华润上华0.18μm BCD工艺。通过选用带有保护环的器件完成隔离,同时,在版图绘制过程中,使PMOS管远离NMOS管,以减小闩锁效应对电路的影响。为消除天线效应,采用了“跳线”的方式来释放电荷[15]。为了减小器件的失配问题,在绘制版图过程中对电流镜、比较器的差分输入管等器件进行了叉指匹配设计。电荷泵版图设计如图3所示。版图面积最终为660.71μm×312.42μm。

图3 电荷泵设计版图
4 电荷泵结构及功能分析
4.1 整体架构
电荷泵整体结构如图4所示。它由电荷泵主体电路HVCP、监视电路HVDT2以及逻辑门构成。其中逻辑门采用低压器件设计,其余模块均使用耐高压器件进行设计。高耐压MOS管的源漏之间可承受高压,但其中的NMOS管、PMOS管的源栅之间皆只有5V的耐压能力。
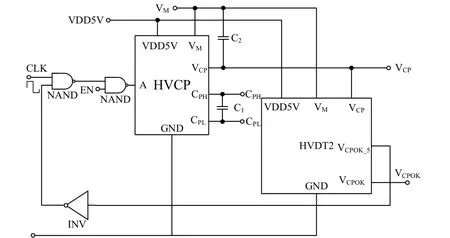
图4 电荷泵整体电路
图中,C1、C2为片外电容。CLK信号来自片内振荡器产生的5V方波时钟信号。EN使能信号用于控制电荷泵的启动和关闭,EN为1时,启动电荷泵,EN为0时,没有信号进入电荷泵。VM是系统功率电源(35~40V)。VCP是电荷泵的输出引脚;CPH和CPL是用于连接片外电容的辅助引脚。VDD5V为片内LDO产生的5V电源电压。
VCPOK为判断信号,当其输出为高电平时,表示VCP已高于VM+3V,VCP已可驱动H桥中高端NMOS管,但每次开启高端NMOS管后,会造成一定的电荷损失,导致VCP电压降低。为避免影响对H桥的控制,VCP还要升到更高的电压。考虑到NMOS管的栅源(漏)耐压问题,VCP最高升到VM+5V,当VCPOK_5为1时表示VCP已达到VM+5V,电荷泵主体电路不再工作。
4.2 主体电路架构及分析
所设计电荷泵主体电路HVCP模块如图5所示。为便于分析,将整体电路中的电容绘制在原理图虚线框内,与普通管作出区分;高耐压管用带点的MOS管表示。
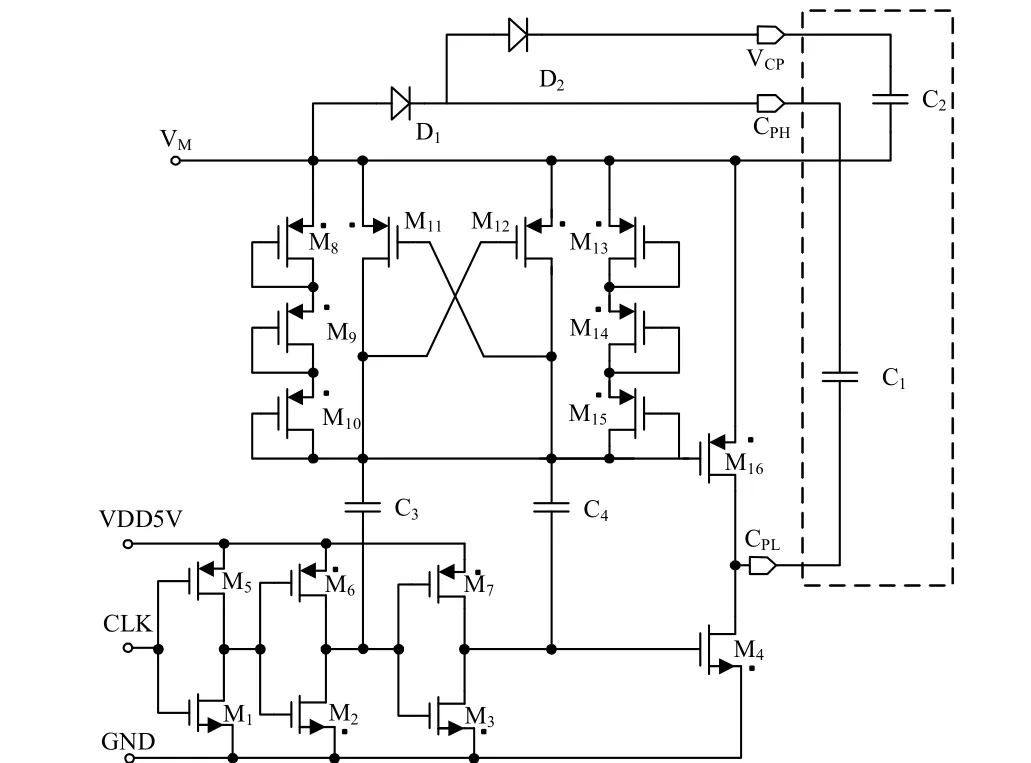
图5 HVCP模块原理图
图中,CLK端输入的是0~5V方波时钟信号;M16、M4交替导通,使得CPL端可输出0~VM的方波信号。当M4导通时,M16截止,CPL为低电平,VM通过二极管D1向电容C1注入电荷,C1上下极板压差为VM;当M4截止时,M16导通,CPL为高电平,由于电容电压不能突变,C1上极板电压随着下极板电压跳高而跳高,使得C1上极板电压CPH高于VM,此时D1截止,C1中存储的电荷经D2向C2注入,电荷泵输出电压经VCP引脚输出。M11、M12为交叉耦合正反馈结构,可使M16管迅速导通或截止;C3、C4用于加速M11、M12、M16的状态变化。
由于所用工艺中的高耐压PMOS管源栅耐压只有5V,故使用二极管连接方式的M8-M10、M13-M15管,对M12、M11、M16管进行保护,使得源栅压差被限制在3个VTHP(约为3V),以此提高可靠性。
对于C1、C2,在整个充电过程当中,ΔQ1=ΔU1×C1、ΔQ2=ΔU2×C2,且ΔQ1=ΔQ2,由此可得:

C1上的电压变化量ΔU1即为VM,在设计中最大为40V,考虑到耐压问题,VCP与VM的差值ΔU2最大为5V,则有C2=8C1。在实际电路中存在一定的电荷损耗,C2要大于8倍C1。综合考虑,设计选用的片外电容C1为22nF,C2为220nF。
4.3 监视电路
HVDT2为电荷泵电压监视电路,原理图如图6所示。此部分电路主要由两个电压比较器构成,设计的关键在于如何提供参考电压,以及如何进行VCP与VM差值的比较。

图6 HVDT2模块原理图
由于VM的工作电压范围为35~40V,VCP也并非固定值,而是在VM的基础上增加某个电压值,因此参考电压只能采用基准电流与电阻的乘积来产生,即:VCPI=VCP-IB1R1、VR1=VM-IB2R2、VR2=VM-IB3R3,两个电压比较器的输入电压之差则分别为:

在此若有:IB1R1-IB2R2=5V、IB1R1-IB3R3=3V,则当VCP-VM大于5V时,图6中的VO经两级反相器整形后,可在VCPOK_5端得到高电平(5V逻辑)。同理,当VCP-VM大于3V时,可在VCPOK端输出高电平。
由于VM最高为40V,选用40 V耐压能力的MOS管即可保证漏源之间不超耐压,此时需要考虑的是栅源耐压问题。当电路正常工作时,M1、M2、M6、M7管源端电压约为VM,为保证源栅之间不超耐压(5V),R1、R2、R3电阻上产生的压降应保证在5V之内。在充分考虑电路功耗及版图面积之后,通过合理选择IB和R1、R2、R3可以使VCP1、VR1和VR2处于VM~5V到VM之间,以保证M1、M2和M6、M7的源栅压差在5V以内。图6中的M12~M15选用的是可承受40V电压的高耐压NMOS管,由于栅极都接5V,所以源极以下不会超过5V,故图6中的M16、M17、M20、M21皆采用5V耐压管。
5 电荷泵整体仿真
本设计在Cadence上进行,并应用HSPICE完成仿真。在功率电源VM为40V、CLK时钟信号频率为100kHz时,电荷泵整体仿真结果如图7所示。

图7 电荷泵电路仿真结果
使能信号EN置1,经208μs后电荷泵输出VCP上升至43V,此时电荷泵已能够驱动H桥高端功率管充分导通,VCPOK输出高电平;再经121μs后,VCP上升至45V,VCPOK_5输出高电平,电荷泵不再升压。
图8为电荷泵在25°C,不同工艺角下,在功率电源VM为40V、CLK时钟信号频率为100kHz时的仿真结果。其中VCP最高为45.7V,最低为44.6V。
电荷泵输出电压纹波是该类电路的重要参数之一,在负载电流3mA条件下,模拟出输出电压VCP及纹波的大小,如表1所示。
由仿真结果可见,在时钟频率为100kHz、不同功率电源电压和3mA负载电流条件下,电荷泵输出电压纹波始终在81mV以内,效果较为理想。
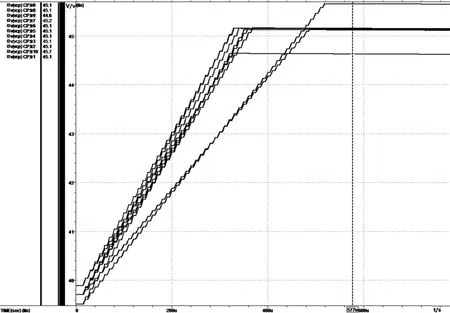
图8 各工艺角下的仿真结果
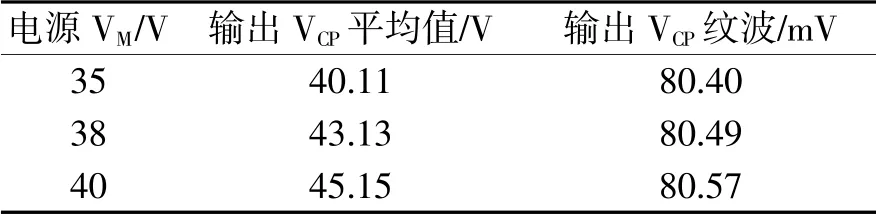
表1 不同电源电压下电荷泵输出模拟结果
6 结束语
本设计针对步进电机驱动芯片中的高可靠性电荷泵电路,在经典Dickson电荷泵电路的基础之上,引入交叉耦合的正反馈结构,提高了电荷泵的转换速率,并可利用数字信号控制回路来控制电荷泵的工作状态。在功率电源VM为35~40V时,输出电压范围可达38~45V,同时在整个功率电源工作区间内实现了输出电压与系统率电源之间的恒定的3~5V压差,确保了对于功率电源范围内的任一值,恒有理想的电压关系成立。对高耐压管栅源所做的保护设计,也使设计具有高可靠性。该设计在仿真中展现出优秀性能,满足H桥驱动电路的设计要求,具有广阔的应用前景。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
莆田学院学报(2021年5期)2021-11-13
舰船科学技术(2021年12期)2021-03-29
科技传播(2019年15期)2019-08-22
速读·下旬(2019年3期)2019-04-11
科学与财富(2017年27期)2017-10-17
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
中国新通信(2017年1期)2017-03-08
