
雷达网情报信息按需分发方法研究*
2022-09-06 08:57李鹏飞迟文君
舰船电子工程 2022年7期
鲁 军 李鹏飞 迟文君
(陆军炮兵防空兵学院郑州校区 郑州 450000)
1 引言
信息化战争条件下,实时、动态地掌握战场态势,并将情报信息及时按需地发送到各个作战单元,对于夺取信息优势、打赢信息化战争是至关重要的。防空作战中,情报信息是指挥员进行作战指挥的基本依据,也是夺取战场主动权的前提条件。复杂战场条件下,敌通常采取小编队、多批次、强干扰、多方向对我方保卫目标进行攻击,由于雷达受到地球曲率、地物遮蔽、地杂波、电磁干扰的影响,使得雷达准确获取空中目标信息的难度进一步加大。假如雷达站能够获得空中目标综合空情辅助信息,就能提升雷达发现目标的能力。雷达组网能够实现全天候、多空域的对空侦察,获取目标信息,并实时上报雷达空情,使得空情融合处理中心接收与处理的目标信息多达几百批。面对大量的综合空情,情报人员难以快速、准确的空情分发。因此,必须要利用辅助决策手段,实现“人在回路”的人机协同情报信息按需分发,增强空情分发的实时性、准确性与针对性。通过将综合空情按需分发给雷达站,能够增强空情录取能力和录取精度,发挥雷达网协同侦察的优势。
2 雷达网情报信息分发的流程
情报信息优势是未来信息化防空作战决策优势和行动优势的前提,是取得防空抗击作战的关键[1]。在战场通信资源有限的情况下,应当根据雷达站的实际需要,有选择地将情报信息发送给各雷达站,实现情报信息的按需分发、精准分发,能够避免雷达站的“信息过载”和减轻通信传输压力,提升空情资源对雷达发现目标的辅助作用。在防空作战中,对于雷达站而言空中目标是否为探测的重要目标,取决于目标对保卫目标的威胁程度。而目标是否对保卫目标造成威胁,需要用门限对目标威胁度的大小进行判别,即与阈值k比较。当目标的威胁值大于设定的阈值时(W>k)可判定该批目标对保卫目标有威胁,也即为雷达需要重点关注的目标。当目标的威胁值小于设定的阈值时(W≤k),该批目标对保卫目标不造成威胁,也就是雷达不需要重点关注的目标,不需要重点探测。情报信息的按需分发不仅要考虑空中目标的威胁性,也要考虑其是否在雷达站的预警范围之内。通过将空中目标和雷达的相对距离与雷达预警半径r进行门限比较,可以判定其是否在雷达预警范围内。对于不在雷达站预警范围之内的目标信息,雷达站是不用过多关注的,这些信息也不需要发送到雷达站。因此,构建以雷达预警范围为依据的情报信息需求模型,然后以雷达的情报信息需求模型与空中目标的威胁估计值进行动态匹配,最后实现对情报信息的按需分发,其流程如图1所示。
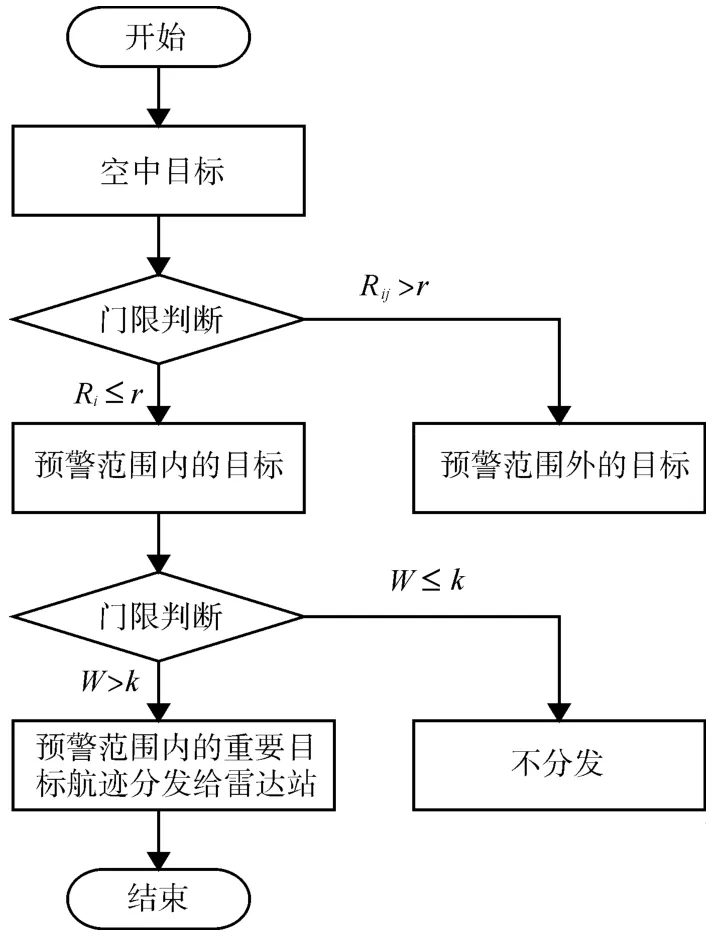
图1 雷达网情报信息分发流程图
3 雷达网情报信息分发的数学模型
3.1 雷达预警范围估计模型
假设p时刻第i部雷达站的位置为(Xi,Yi,Zi),空中第j批目标的坐标为(Xj,Yj,Zj),则雷达i与目标j之间的相对距离为

式中:i=1,2,3,…,N,N为雷达网中雷达数量;j=1,2,3,…,M,M为空中目标数量。
雷达网中各雷达的探测距离通常由雷达通视距离与最大作用距离所决定,雷达对空中目标的最大探测距离可以用以下公式表示[2~3]:

式中:Rs为雷达的通视距离,Rmax为雷达的最大作用距离。
1)雷达的通视距离Rs可以表示为

式中:h为雷达天线高度,H为空中目标飞行高度。
2)雷达的最大作用距离Rmax可以表示为

式中:Pt为雷达的发射功率;Gt为发射天线的增益;Gr为接收天线的增益;λ为雷达作波长;σ为雷达反射截面积;K为玻尔兹曼常数;T0为标准室温;Bn为接收机噪声带宽;Fn为接收机噪声系数;(SN)min为最小可检测信噪比。
雷达网各雷达站的预警范围可定义为:需要提前预警的探测空域,即在雷达的探测范围向外延伸一定的距离,其值通常由雷达的最大探测距离与预警时间对应的航程等确定。其表达方式为

式中:r表示雷达预警半径;Dmax表示雷达的最大作用距离;v表示空中目标的飞行速度;ti表示融合处理中心到雷达站的情报信息传播时延;tj表示雷达站雷达操作手反应时间。通过雷达与空中目标的相对距离Rij与雷达预警半径r作比较,判断目标是否在该雷达的预警范围内。
3.2 空中目标威胁估计模型
信息化战争条件下,战场环境复杂、来袭兵器多元,战场情报信息通常具有较大的模糊性与动态性。影响空中目标威胁大小的因素较多,但这些影响因素一般只能用模糊语言进行描述,其威胁度的分析、判断需要利用灰色理论、模糊数学等进行建模[4]。目前,关于目标威胁估计的方法主要有模糊综合决策法[5~7]、贝叶斯推理[8]、灰度关联决策[9]等。本文针对雷达网空情按需分发,综合雷达网的情报信息,以保卫目标为中心,将空中目标威胁估计参数确立为相对距离、飞行高度、飞行速度、航向角、目标类型,运用模糊理论与层次分析法对空中目标进行威胁估计。基本步骤是:首先进行参数威胁度估计;然后进行参数权重确立;最后计算空中目标综合威胁估计值。
3.2.1 空中目标威胁估计参数隶属度
模糊数学于1965年由美国控制论专家L.A.扎德(L.A.Zadeh)首次提出,将数学的应用范围从精确现象拓展到模糊现象,并在随后的40多年得到广泛地发展与应用[11]。采用模糊理论方法对空中目标威胁估计参数进行描述并确立以下规则[6,10]:若空中目标处于某一属性参数的攻击力最小时,则认为其目标威胁值也是最小值,设其评判函数值为0;若空中目标处于某一属性参数的攻击力最大时,则其目标威胁值也是最大值,设其评判函数值为1;当威胁估计参数为其他状态时,其评判函数值处于0~1之间。
1)相对距离威胁度函数
空中目标的相对距离威胁程度与相对距离的大小为递减关系,如图2所示为目标威胁程度随相对距离变化的关系。
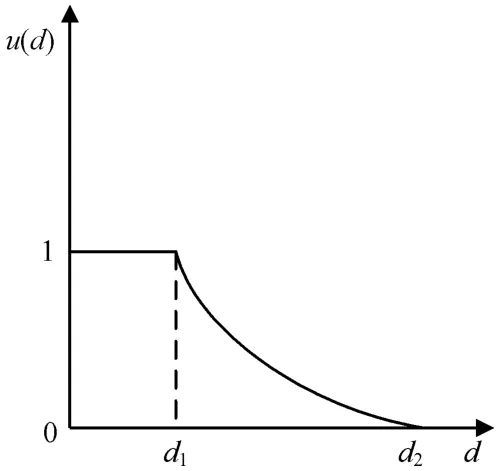
图2 相对距离与目标威胁度的关系
当空中目标距离保卫目标越大时其威胁越小,当空中目标与保卫目标距离增大至一定范围,即d>d2时,则可认为该目标对保卫目标不构成威胁,设其威胁值为0;当袭目标与保卫目标距离减小至一定范围时威胁值最大,即d<d1时,设其威胁值为1。因此,可以得到以相对距离为参数的威胁度隶属度函数:
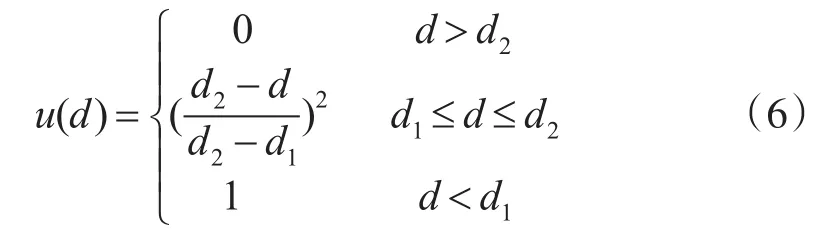
式中:d1、d2分别表示为空中目标对保卫目标造成威胁的最小距离与最大距离。
2)飞行高度威胁度函数
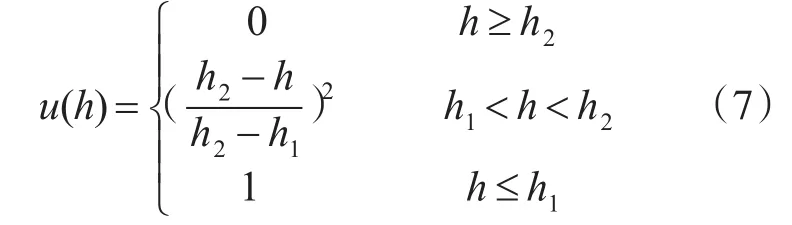
空中目标的距离威胁程度与飞行高度的大小也为递减关系,如图3所示为目标威胁程度随飞行高度变化的关系。
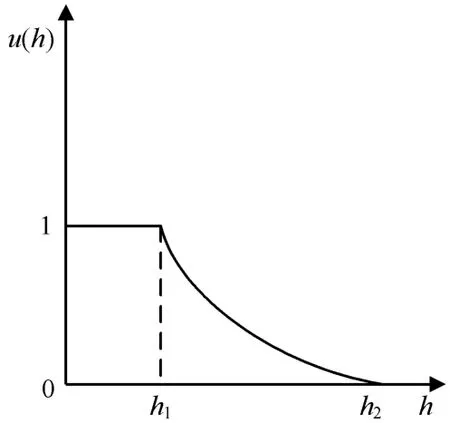
图3 飞行高度与目标威胁度的关系
当空中目标飞行高度越高时对保卫目标威胁越小,飞行高度越低时其威胁越大。因此,可以得到以飞行高度为参数的威胁度隶属度函数:
3)飞行速度威胁度函数
空中目标的威胁程度与飞行速度的大小为递增关系。如图4所示为目标威胁程度随目标飞行速度变化的关系。
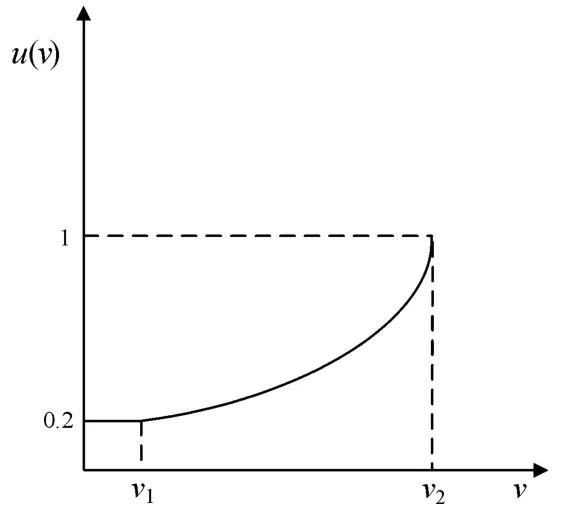
图4 飞行速度与目标威胁度的关系
当空中目标飞行速度越大时,飞临我方阵地的时间就越短,对保卫目标威胁越大;当目标飞行速度越小时,对保卫目标威胁就越小,将其最小值量化为0.2。飞行速度为参数的威胁度隶属度函数:
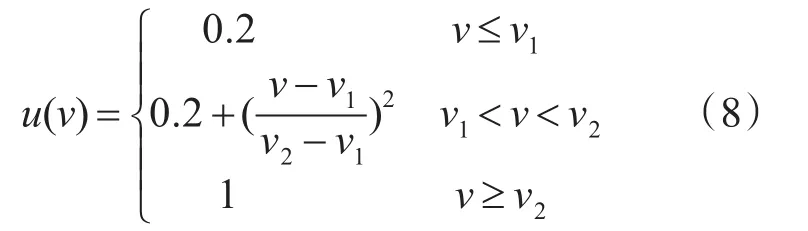
式中:v1、v2分别表示为空中目标对保卫目标造成威胁的最小飞行速度与最大飞行速度。
4)目标航向角威胁度函数
目标航向角体现了空中目标的意图,即是否会攻击保卫目标,如临近、离远状态。如图5所示为空中目标与目标威胁度之间的关系。
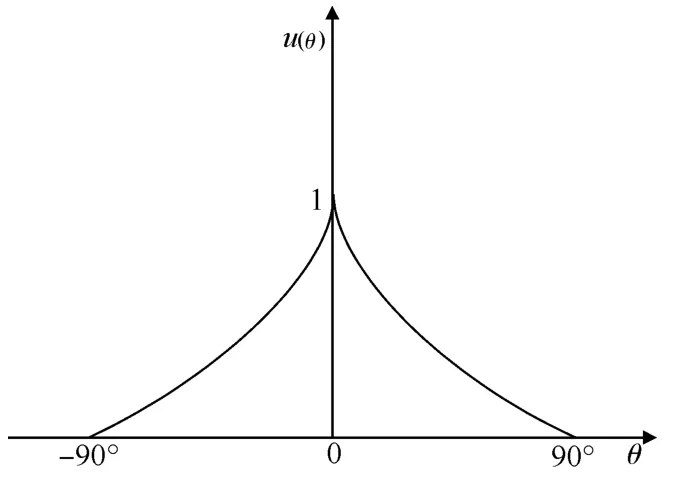
图5 航向角与目标威胁度的关系
当航向角处于|90°|之内时,空中目标飞行状态为临近飞行,对保卫目标造成威胁;当航向角在|90°|之外时,飞行状态为离远飞行,对保卫目标基本不构成威胁。航向角为参数的威胁度隶属度函数:

5)目标类型威胁度函数
①传染病可疑症状整合不足,疾病早期甄别能力有限。我国目前的症状监测一方面依托发热门诊为主进行流感样病例监测[9],另一方面是以肠道门诊为主的感染性腹泻症状监测[9-10],但仍缺乏针对皮疹、出血、黄疸、结膜出血等症状的监测,对传染病可疑症状的系统整合以及疾病早期的甄别能力存在不足。
不同的类型的空中目标对保卫目标造成的威胁是不同的。通过专家评估系统可得到不同类型空中目标的威胁度隶属函数u(g),将其定义为0~1之间,如表1所示。
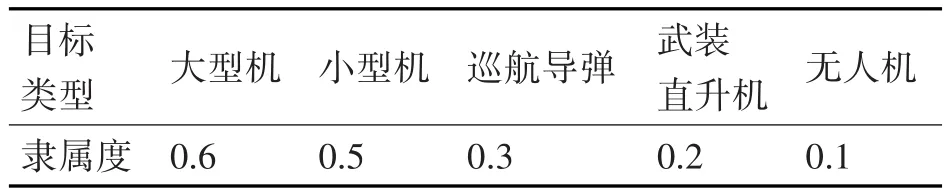
表1 空中目标类型隶属度
3.2.2 空中目标威胁估计参数权重
空中目标不同的威胁估计参数对保卫目标造成的威胁不同,需要对其影响保卫目标安全的威胁权重进行确定,即计算各个参数加权因子W=(w1,w2,…,wn)。层次分析法(The Analytic Hierarchy Process,AHP)是在20世纪70年代初由美国教授萨蒂(T.L.Saaty)提出来的,是一种定性和定量相结合的、层次化的、系统化的科学方法,能够很好地解决权重分配问题。文献[6]与文献[12]均利用层次分析法进行权重分配研究,结果表明,该方法在结合模糊理论的情况下,得到较好的目标威胁估计值。首先,通过构建目标威胁度判断矩阵,将威胁估计参数对于目标威胁度的相对重要性,进行两两比较,能够得出准确度较高的定量分析。然后,计算得出目标威胁度的权重大小,通过一致性检验。定义一致性指标为

式中:λmax为判断矩阵的最大特征根,n为参数的个数。
为了衡量一致性指标CI的大小,采用随机一致性指标RI与其进行比较,定义一致性比率为

3.2.3 空中目标综合威胁估计
在空中目标威胁估计参数的隶属度函数与权重确立以后,利用线性加权求和的方法将目标的威胁估计参数的权重分别乘以对应的威胁度,再进行求和,即可得到空中目标相对于保卫目标的综合威胁估计值:

4 仿真分析
假设我方保卫目标为Z,保卫目标附近部署两部雷达,分别为雷达A站、雷达B站,主要负责侦察预警。通过雷达网融合处理中心综合多源空情,现已发现5批目标。通过分析,空中目标的状态信息、目标威胁参数信息如表2、3所示。
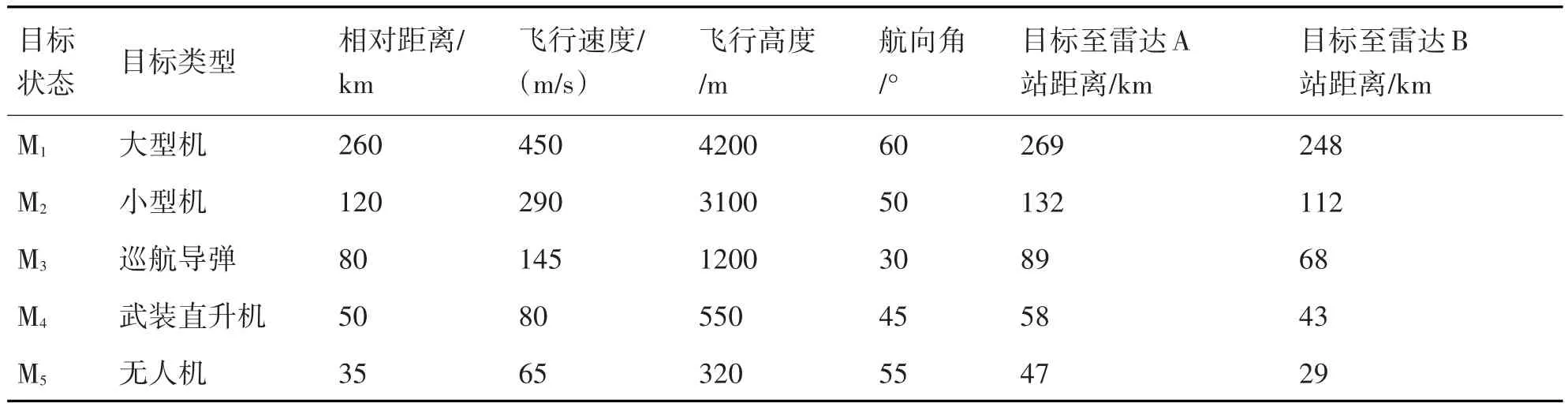
表2 空中目标状态信息
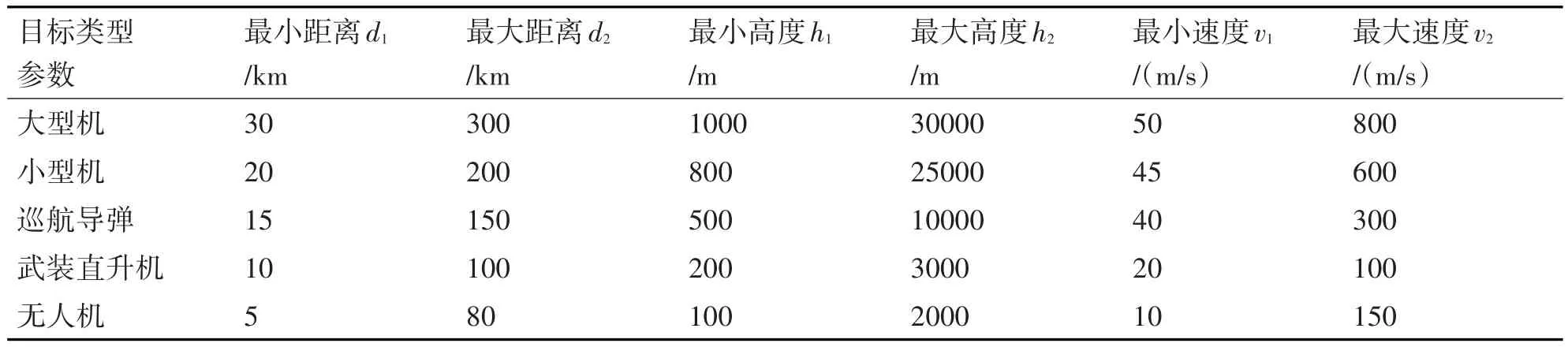
表3 空中目标威胁参数信息
设空中目标的威胁估计参数为目标类型(C1)、相对距离(C2)、飞行速度(C3)、飞行高度(C4)、航向角(C5),依据专家估计并结合层次分析法的参数重要性标度,可得到空中目标威胁参数的重要性判断矩阵为

通过该判断矩阵计算可知λmax=5.2298,即可得到CR=0.051<0.1,通过一致性检验。计算判断矩阵归一化的特征向量作为矩阵的权向量w=[0.0604,0.1282,0.4046,0.3011,0.1056]T。然后,对空中目标威胁度进行综合估计可得到各目标的威胁度。
假定雷达A站的最大探测距离为200km,雷达B站的最大探测距离为50km,空中目标的飞行速度为800m/s,雷达操作手反应时间与空情传播时延的总时间为60s。取目标综合威胁度阈值K=0.57,通过两次情报信息筛选后,将目标M2、M3、M4的航迹信息分发给雷达A站,目标M3、M4的航迹信息分发给雷达B站。
5 结语
本文针对复杂战场条件下,雷达受到地球曲率、地物遮蔽、地杂波、电磁干扰影响,难以快速发现空中目标的问题,提出了一种雷达网情报信息按需分发的方法。首先基于雷达最大探测距离构建了雷达预警范围估计模型;其次利用模糊理论与层次分析法构建了空中目标的威胁估计模型;然后通过两次门限判断完成了空中目标的筛选,确定分配给各雷达站的目标信息,经过仿真验证了该方法的可行性。通过雷达网情报信息按需分发,可为雷达站提供精准的目标指示,辅助雷达操作手从复杂回波中快速甄别与准确录取目标,发挥情报信息的共享优势,增强雷达网体系作战效能。
猜你喜欢
红领巾·探索(2022年3期)2022-03-14
热带作物学报(2021年1期)2021-02-22
科普童话·百科探秘(2020年5期)2020-09-14
航空模型(2016年10期)2017-05-09
小学生导刊(高年级)(2016年11期)2016-11-14
少年科学(2015年7期)2015-08-13
IT经理世界(2014年10期)2014-05-29
中国信息化·学术版(2013年5期)2013-10-09
小哥白尼·军事科学画报(2009年4期)2009-05-11
小哥白尼·趣味科学画报(2006年1期)2006-02-15
