
一种侦察车训练模拟器的设计与实现
2022-09-09 02:16魏钜熔丁勇叶国林
电子技术与软件工程 2022年11期
魏钜熔 丁勇 叶国林
(江西联创精密机电有限公司 江西省南昌市 330096)
1 引言
侦察车是侦察部(分)队获取侦察情报信息的重要侦察装备,主要用于侦察敌情、地形,观察战场、测定目标位置,观察射击效果,收集、处理及上报侦察情报信息等。该装备机械化和自动化程度较高,作业操纵复杂,训练难度大,且不易掌握,列装部队后需要投入较多的训练人员、物资和财力资源。使用侦察车实装装备在驻地训练时,存在现地组织困难、目标无法保障、装备损耗大、维修保养成本高等问题,更为突出的问题是光电侦察时缺乏训练场景和各类目标,只能进行侦察设备操作和控制动作,无法进行关键和核心操作,即对目标进行侦察和测定。
当前备战训练、以战领训任务日趋繁重,常态化练兵需求日益增长。模拟训练作为信息化条件下部队训练的重要手段和方法,因此,研究并研制侦察车训练模拟器对部(分)队了解和熟悉新式装备的操作与使用,缩短装备战斗力生成周期、形成基于信息系统装备体系作战能力具有重大现实意义。通过分析和分解现役轮式和履带式侦察车的组成和工作原理等,对轮式和履带式侦察车的主要侦察设备和侦察软件进行模拟,构建一种侦察车训练模拟器,为受训人员提供逼真的室内操作使用环境和丰富的三维虚拟战场环境等,能够快速提升受训人员熟悉装备原理与操作使用、提升侦察技能及情报处理能力。
2 模拟器系统组成与工作流程
2.1 模拟器系统组成
侦察车训练模拟器主要由模拟方舱、导调评估分系统、模拟侦察操控分系统及三维视景仿真分系统组成。
模拟方舱用于模拟实装车辆方舱内部侦察员所处的较为局凑的作业环境,其外形、尺寸及布局参考实装车辆方舱部分设计,尽量保证与装备方舱接近,同时结合训练模拟器实际情况进行简化设计。舱体外表面喷涂军绿色数码迷彩,采用与实装尺寸基本相同的半剖结构形式,设备位置与实装基本相同。
导调评估分系统是训练模拟器的控制与管理中心,主要用于实现训练基础数据管理、训练科目设置、训练过程导调、训练数据监控、桌面监控、训练成绩评估等功能。导调评估分系统主要由导调评估席硬件和导调评估软件组成。
模拟侦察操控分系统是训练模拟器的核心,模拟了实装装备的侦察显控终端、控制手柄和侦察操控软件,为受训人员提供与实装基本一致的操控使用环境。主要用于模拟实现定位定向、光电侦察、侦察控制、伺服控制、激光告警等功能。操控分系统主要由模拟显控终端、控制手柄、通信代理软件和模拟操控软件等组成。
三维视景仿真分系统是训练模拟器的重要组成部分,模拟了侦察所需的逼真的三维战场环境,主要包括三维地理环境、气象环境及虚拟目标环境,三类环境可组合搭配构建丰富的三维战场环境。其中,三维地理环境含城市、机场、海岛、戈壁、丘陵、草原、高原等类型;气象环境含晴天、阴天、多云等类型;虚拟目标环境含装甲车、坦克、地面工事、军用卡车、火炮、空中直升机等类型。三维视景仿真分系统由三维视景仿真软件组成。
2.2 模拟器工作流程
训练模拟器的使用对象可分为组训人员和受训人员两类角色。组训人员是训练的组织者和讲评人员,受训人员是该类装备的侦察员和侦察指挥员或者操作手等。组训人员使用导调评估分系统进行训练的组织、导调与考评等;受训人员使用模拟侦察操控分系统进行操作训练、技能训练等。整个训练过程可划分为训练准备、训练实施和训练评估三个阶段,模拟器各阶段的工作流程如下。
训练准备阶段:组训人员使用导调评估软件,根据训练计划要求拟制或选择合适的训练方案,选择训练科目并编制训练科目相关参数等内容;受训人员使用通信代理软件完成人员信息录入与登录。组训人员锁定训练方案后模拟显控终端将自动启动模拟操控软件等。
训练实施阶段:组训人员使用导调评估软件执行训练开始,发布训练方案(含训练科目),训练方案初始数据自动下发至通信代理软件、模拟操控软件和三维视景仿真软件,模拟操控软件根据训练方案要求自动加载战场环境和生成模拟目标;受训人员通过操作模拟侦察操控分系统进行定位导航、光电侦察、目标搜索跟踪、目标测距等过程,训练过程中自动采集与上报操作的按键信息、数据信息、状态信息等信息。同时,导调评估分系统支持训练实施过程中的桌面监控。
训练评估阶段:训练结束后,导调评估软件从数据库中读取训练方案、训练科目、评估准则、完成时间、操作数据、作业结果等信息,根据训练科目指标体系及对照操作记录、操作时间、关键步骤等进行自动客观评分;同时组训人员可通过数据复演或桌面录像方式查看受训人员的操作过程,结合经验进行主观评分;最后给出最终训练成绩,生成评估报告。
3 主要模块的设计与实现
3.1 导调评估分系统
导调评估分系统为组训人员提供操作使用平台,主要由导调评估席硬件和导调评估软件组成。导调评估席硬件作为导调评估软件的载体,主要由导调计算机、显示器、网络交换机等设备组成。导调评估分系统通过网络交换机与模拟侦察操控分系统内的各设备互联,构建内部局域网。导调评估软件是导调评估分系统的核心,实现训练方案设置、训练科目下发、训练情况监视、训练成绩评判以及系统管理、数据管理等功能,主要包含数据管理模块、训练科目设置模块、训练过程导调模块、态势显示模块、训练数据监控模块、训练成绩评估模块。
在训练准备阶段,组训人员使用导调评估软件录入和编辑受训人员基础数据信息、训练科目及参数信息、科目评估准则信息,编辑训练时间、参训人员、训练科目(三维场景选择,目标类型、数量、运动轨迹、运动速度等)、初始态势等信息,形成训练方案,训练方案是每次训练的依据。
在训练实施阶段,待受训人员登录后,组训人员使用导调评估软件选择并锁定训练方案,执行开始指令、下发训练方案数据,加载三维地形及目标模型,展示训练方案的初始态势,实时接收、解析、显示和存储受训人员的操作数据、按键数据、反馈数据等;根据操作反馈实时显示三维态势信息。同时,通过桌面监控模块监视受训人员操作模拟显控终端的桌面,并根据训练需要可对监控的桌面进行录像,为后续训练评估提供视频来源。
在训练评估阶段,训练结束后,导调评估软件能够根据各训练科目的评估准则自动对按键信息、参数信息、操作关键动作、操作顺序进行评分,并能将错误信息用高亮和不同颜色进行展示。同时,组训人员可通过数据复演和视频复演方式,对受训人员的操作进行复演,对各过程进行人工评判调整,给出最终训练成绩,之后形成训练档案。在训练评估结束后,组训人员可通过训练评估档案对训练过程进行讲评,分析容易出错的操作和动作。
训练考评准则要素是操作时间、操控步骤顺序以及各动作和要素的加权平均。当为综合训练科目时,是各个科目的加权平均,权重系数可动态调整。评估公式:(∑((单课目分值)*课目权重)/∑课目权重)*时间比例。
单课目分值:若操作存在遗漏或操作顺序不正确,则该单科目0 分;若操作无遗漏、顺序正确且需填写参数,评定参数数值输入正确率(100 * 填写正确参数项 / 参数项数);若操作无遗漏、顺序正确且无需填写参数,则单科目分值为100 分。
时间比例:若训练用时小于等于优秀时间,则时间比例为1,否则依据以下公式计算时间比例:1 -(0.4 *(实际用时-优秀时间)/(及格时间-优秀时间))。依据公式计算的时间比例若小于0,则以0 计。
最终依据评估公式,计算出百分制的训练成绩,将训练成绩分为4 类,分别为:优秀(90 分及以上)、良好(70分以上至90 分以下)、及格(60 至70 分)和不及格(60分以下)。
导调评估软件的处理流程如图1所示。
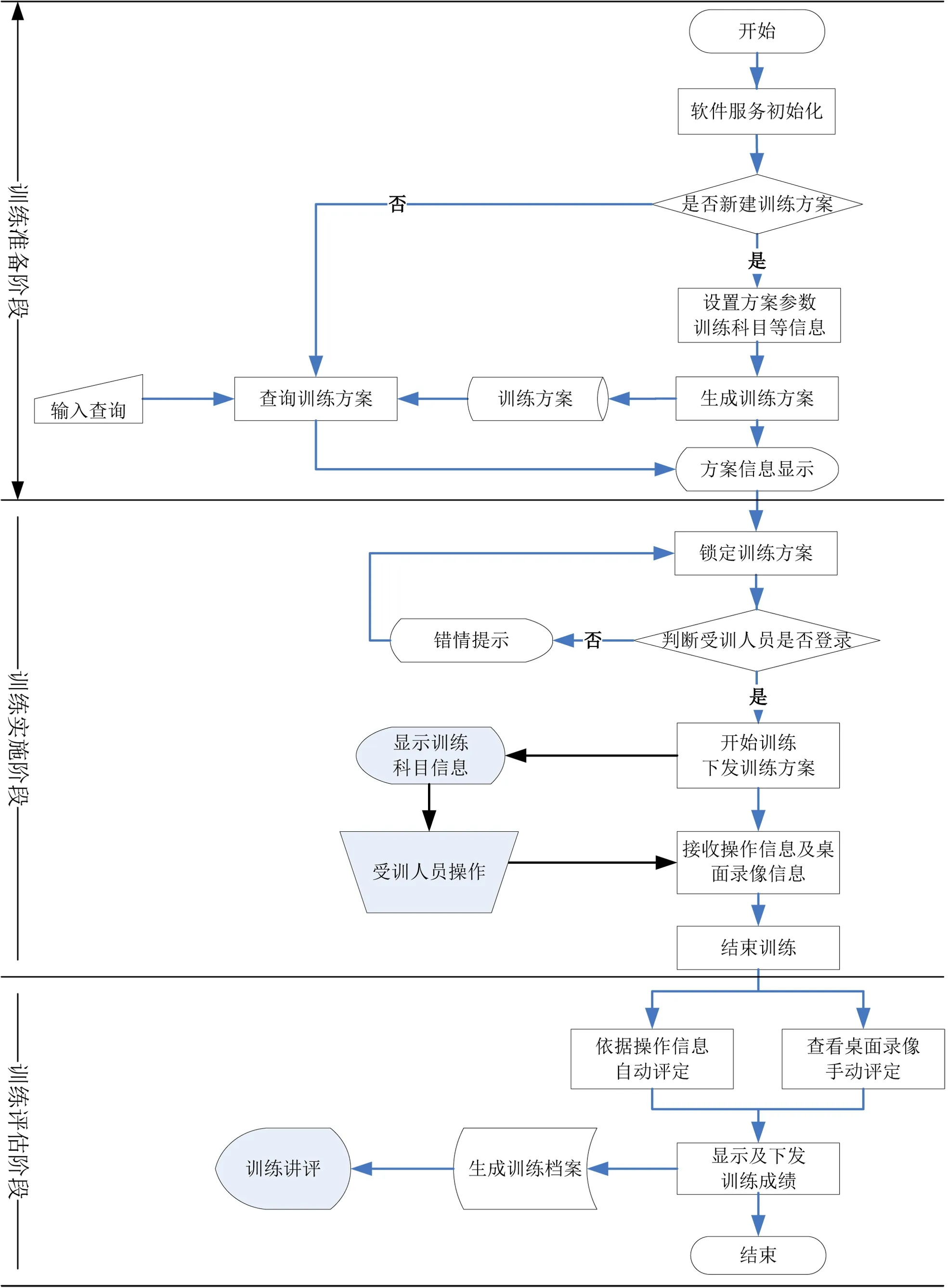
图1:导调评估软件处理流程
3.2 模拟侦察操控分系统
模拟侦察操控分系统为受训人员提供操作使用平台,为保障受训人员能够使用与实际装备基本一致的布局、显示、接口、反馈等人机交互体验与操控使用感受,使用训练模拟器后能够快速上实际装备操作,缩短受训人员熟悉和操作使用实际装备的时间。模拟侦察操控分系统须具有与实际装备基本一致的显示控制终端、控制手柄等设备,以及模拟操控软件等。
通过对实际装备的显示控制终端进行实物测绘,记录显示控制终端的外形尺寸、对外接口、显示控制、按键与反馈、材质材料等,采用半实物仿真技术进行构建,保障显示控制终端的外形布局、接口方式、显示输出大小和分辨率、按键与反馈、材质材料、专用键盘、手感力反馈等与实际装备保持一致;控制手柄选用与实际装备一致的型号,能够保证与实际装备一致的大小、尺寸、按键、方位俯仰转动速度与反馈、按压力度等要求;模拟操控软件具有与实际装备一致的软件菜单、工具栏,定位导航、观察场景显示、图像侦察控制、伺服方位控制、激光告警等界面。其组成框图及连接关系如图2所示。

图2:模拟侦察操控分系统组成框图及连接关系
操作训练使用流程:受训人员根据组训人员下发的训练科目进行操作训练,训练时可先从简单科目开始训练,待有一定基础后进行综合科目训练。训练科目基本涵盖了本装备的特点,如典型的训练科目包含设备加电、定位导航、光电侦察、伺服控制、激光告警、目标测定、目标处理上报等。综合训练科目是将上述训练科目进行组合开展侦察全流程训练,需要侦察员之间协同操作与训练,如从起点到观察点、设备加电、观察战场环境、伺服调整、目标测定与上报等全流程。训练过程中,通信代理软件自动采集训练过程中产生的各类操作数据、按键数据、控制数据、导航数据等,并上报至导航评估分系统。训练过程中,受训人员通过伺服控制和场景控制三维视景仿真分系统的视景,三维视景接收指令后进行实时变化和输出显示,模拟实际战场观察和目标搜索、跟踪及测定等过程。综合训练科目时,模拟侦察操控分系统处理流程如图3所示。
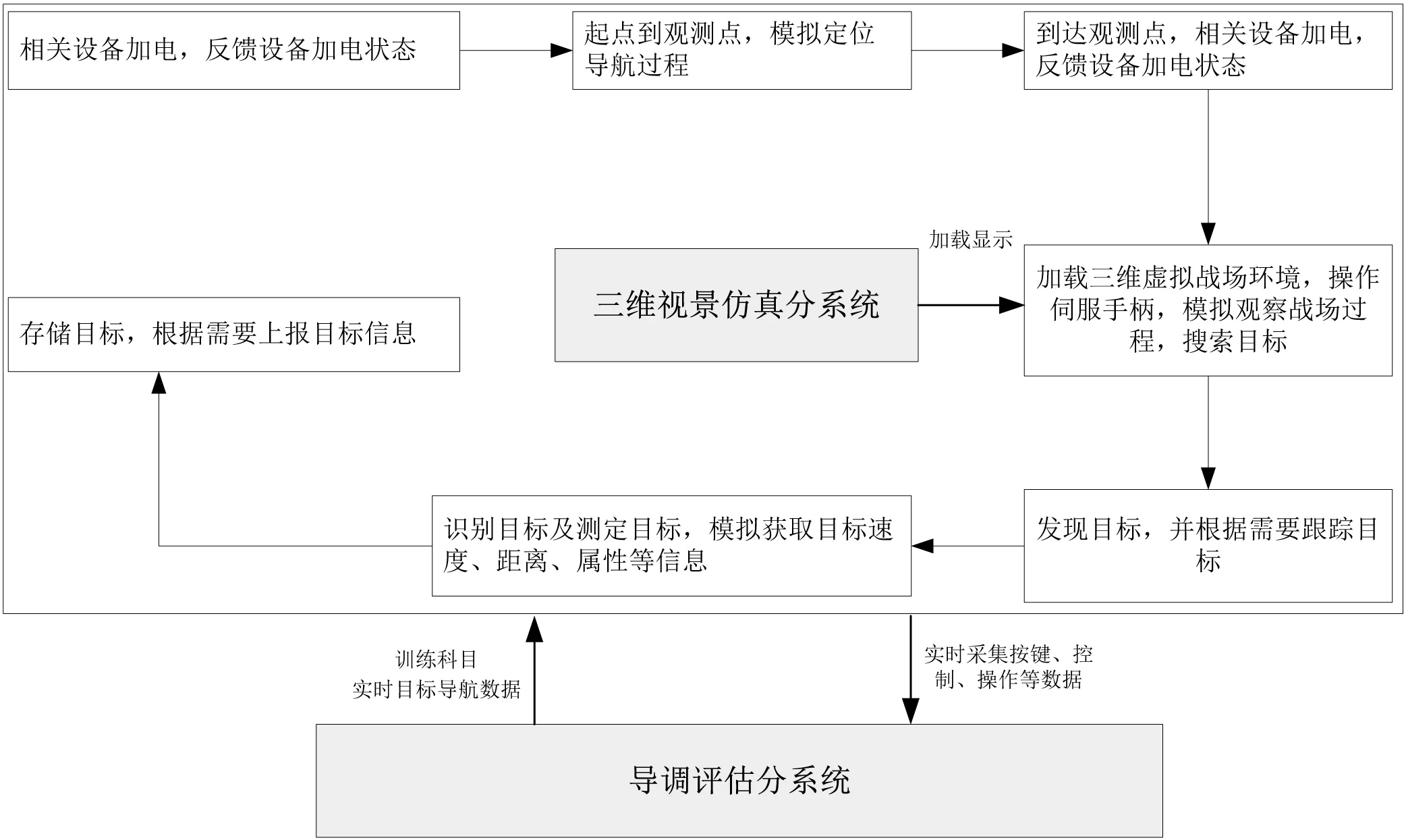
图3:模拟侦察操控分系统处理流程
3.3 三维视景仿真分系统
三维视景仿真分系统为模拟侦察操控分系统提供虚拟三维地理环境、虚拟目标环境及天候气象环境模拟,是训练模拟器的重要组成部分,包含三维视景仿真软件。三维视景仿真软件构建的虚拟战场环境需模拟光电设备和热像设备侦察的图像和过程,需要贴近实际情况。
三维视景仿真软件采用三维实体建模、渲染、处理生成图形技术,模拟了侦察所需的逼真三维战场环境,主要包括三维地理环境、气象环境及虚拟目标环境,三类环境可组合搭配构建丰富的三维战场环境。其中,三维地理环境含城市、机场、海岛、戈壁、丘陵、草原、高原等典型地形类型;气象环境含晴天、阴天、多云、下雪等类型;虚拟目标环境含地面的装甲车、坦克、地面工事、军用卡车、火炮,以及空中的直升机、无人机、战斗机、巡航导弹等常见类型。
三维战场环境包含可见光场景和红外场景两种状态,同一场景下可见光和红外场景能够进行切换,切换时要求场景和目标状态连续性好,无明显卡顿和延迟。其中动画,遵守黄金分割和对称呼应的规律以求美观协调;其中造型,在实装基础上使用美术的近大远小、近实远虚的透视关系;对于色彩,结合实装,在庄重大方的基础上,按照光感要素(色相、明度、彩度)、形色要素(形状、大小、位置)、心理要素(冷暖、轻重、远近)的规律调配材质色彩。对装备性能、作战目标、火炮毁伤效果进行高逼真度的仿真模拟,视觉效果逼真、画面流畅、火光、烟雾等特效真实感强,为受训人员提供场景丰富、效果逼真近似实战的训练场景。
使用Unity3d 开发工具实现可见光和红外场景仿真。其中,可见光场景仿真时,侦察装备侦察目标的基本程式为:先划定侦察区域,然后按照一定的扫描方式使侦察装备视场覆盖目标,再探测目标,识别目标。因此,可见光场景仿真下,侦察装备是否发现目标,取决于目标是否落入搜索区域、目标与侦察装备是否通视、通视条件下的探测概率、识别概率。红外场景仿真时,主要是对虚拟目标和地理环境的真实感红外合成。实现机制是对外部因素影响下的可视模型的纹理灰度数据求解、存储传输以及绘制。其中外部因素包括环境湿度、环境温度、时间段以及大气参数,根据这些参数计算出物体表面的辐射强度,通过材质红外映射图像计算,利用先进的表面着色器编程叠加纹理,逐帧计算各像素灰度值,并实时渲染到屏幕上,从而实现了红外仿真,其处理流程如图4所示。目标跟踪实现方式首先是记录目标的像素位置和像素灰度值,分割出运动目标,得到其位置、大小、然后根据其特征对周围的地物、植被或其他物体的灰度图像进行对比,判断其值是否相等或在误差范围内,实现对运动目标的跟踪。
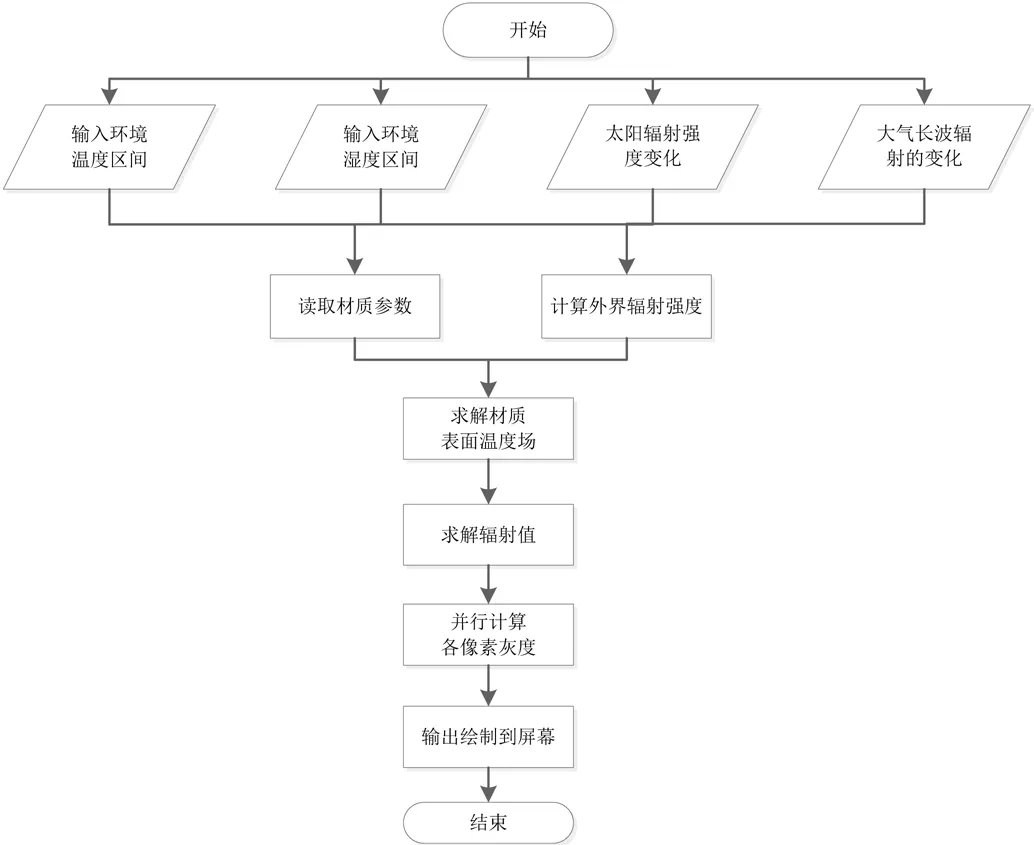
图4:红外场景仿真处理流程
4 结论
本文所介绍的侦察车训练模拟器是基于半实物仿真技术和三维建模仿真技术,集操作训练、技能训练、席位协同训练于一体的综合性、多功能训练模拟器。该训练模拟器在结构布局上紧贴实际装备,侦察操控的操作使用感受紧贴实际装备,具有逼真的操控使用环境,训练科目丰富支持全流程训练;三维视景仿真采用当前最为先进的图形图像处理技术和建模仿真技术,生成了逼真的可见光和红外三维虚拟场景,较好地模拟了该侦察车侦察设备所观察的战场环境和目标环境,且场景可自由组合支持外部导入扩展。侦察车训练模拟器设计合理,运行稳定、可靠。该模拟器的研制和使用将对新型侦察车训练起到一定的积极作用。
猜你喜欢
航空维修与工程(2021年7期)2021-09-05
消防界(2021年24期)2021-01-13
现代职业教育·中职中专(2018年8期)2018-05-14
电子测试(2018年4期)2018-05-09
长江丛刊(2017年2期)2017-11-25
军事体育学报(2015年2期)2015-02-27
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
军事体育学报(2014年4期)2014-02-27
河南科技(2014年24期)2014-02-27
