基于MobileNetV3-SVDD的雷达信号调制方式开集识别
2022-09-11 04:34肖易寒李航于祥祯宋柯
哈尔滨工程大学学报 2022年8期
肖易寒, 李航, 于祥祯, 宋柯
(1.哈尔滨工程大学 信息与通信工程学院,黑龙江 哈尔滨 150001; 2.哈尔滨工程大学 先进船舶通信与信息技术工业和信息化部重点实验室,黑龙江 哈尔滨 150001; 3.上海无线电设备研究所, 上海 201109)
雷达信号调制方式识别是雷达信号侦察分选的主要组成部分,在电子战中起到关键作用。雷达信号调制方式识别研究主要集中在基于深度学习的雷达信号调制方式识别方面。随着深度学习[1]在处理图像识别、语音识别和自然语言处理[2]等领域上的发展,将深度神经网络应用于雷达信号调制方式识别的方法越来越多。文献[3]提出一种基于时频分布和栈式稀疏自编码器的雷达信号识别方法。文献[4]提出了一种基于迁移学习和特征融合的雷达信号识别方法,能够准确识别雷达信号的调制方式。随着雷达技术的发展,雷达信号调制技术不断创新,雷达调制方式不断改变[5-7],然而现有的雷达信号调制方式识别方法基本属于闭集识别,即所有需要测试识别的调制方式是在训练中都已出现过的已知调制方式,不能有效识别出未出现过的未知调制方式。郝云飞等[8]提出了一种基于生成对抗网络的信号调制方式的开集识别,设计了适用于一维信号数据的重构判别网络模型,能够实现信号调制方式的开集识别。Sabokrou等[9]提出一类分类异常检测方法,能够通过重构输入图像来对已知类图像进行去噪和扭曲异常图像,实现对异常图像的检测。文献[10]使用支持向量机获得的概率值实现未知样本的识别。文献[11]通过二分类对抗训练实现未知样本的识别。开集识别可以解决无法识别出未知类调制方式的问题,为此提出一种能够分类识别已知类并识别出未知类的雷达信号调制方式开集识别方法。
本文为实现对雷达信号未知调制方式的有效识别,设计了一种基于轻量级神经网络和一类分类器的网络模型,并以此为基础提出了一种雷达信号调制方式开集识别方法。
1 雷达信号预处理
雷达信号是非平稳信号,相较于时域分析或频域分析,时频分析能获得更多有效信息。时频分析将一维的时间信号映射到二维的时频平面,充分刻画雷达信号的时频联合特征[12-14]。为了便于将雷达信号送入深度神经网络进行特征提取,需要进行雷达信号预处理,主要包括时频分析、图像大小调整和三原色(red green blue,RGB)三通道映射。
主要的2种时频分析方法包括线性时频分析和非线性时频分析,其中,线性时频分析包括短时傅里叶变换、小波变换和S变换等,非线性时频分析包括维格纳-威尔分布(Wigner-Ville distribution,WVD)和崔-威廉斯分布(Choi-Williams distribution,CWD)等。
本文使用的CWD时频分析拥有交叉项干扰较小、分辨率高、识别精度高等特点。连续信号x(t)的CWD表示为:
(1)

为了更有效地展示不同雷达信号的CWD时频图像,减少交叉项干扰,本文使用σ=1来控制交叉项干扰和信号分辨率[14]。CWD的离散形式为:
(2)

X3(s,τ,l)e-σs2/(4τ2)
(3)

在时频分析过程中对采样点数较少的雷达信号进行补零处理以达到更好的时频分析效果,但也令时频图像包含了无效信息。为了消除这一因素对特征提取的影响,对其按照信号采样点数进行裁剪,并且调整时频图像的大小。本文使用双线性插值算法对时频图像进行调整。
为了适应深度神经网络的结构以实现特征提取的有效性,将调整大小后的时频图像根据数值大小映射成包含R、G、B共3个通道的图像,调整后的RGB图像颜色深浅表征了时频能量的分布。
本文对线性调频信号(linear frequency modulation,LFM)、跳频信号、多时编码信号(T1、T2、T3)和Frank编码信号这6种调制方式的雷达信号进行预处理,图1为信噪比等于8 dB时6种不同调制方式雷达信号的时频图像。由图1可知,不同调制方式的时频图像存在明显差异,这有利于深度神经网络提取特征。
2 雷达信号调制方式的开集识别
本文提出的基于MobileNetV3-SVDD的雷达信号调制方式开集识别方法主要由3部分组成,包括雷达信号预处理、深度神经网络特征提取和开集识别分类器,具体的方法流程图如图2所示。

图1 不同调制方式雷达信号时频图像Fig.1 Time-frequency image of radar signals with different modulation methods
首先将雷达信号进行信号预处理,使用CWD时频分析方法将雷达信号变换成时频图像,通过调整图像大小和RGB图像映射,将时频图像数据调整成适合输入到深度神经网络的数据;其次,将处理好的时频图像数据输入到深度神经网络,提取有效的图像特征,为分类识别做准备;最后,将提取好的时频图像特征输入到由一类分类器构成的开集识别分类器中,完成对雷达信号调制方式的开集识别。

图2 本文方法流程Fig.2 The method flow chart of this article
本文使用的轻量级深度神经网络MobileNetV3、一类分类器SVDD和二者结合组成的MobileNetV3-SVDD网络模型以及开集识别算法流程。
2.1 MobileNetV3-SVDD网络模型
2.1.1 轻量级深度神经网络MobileNetV3
为了满足雷达信号调制方式识别方法在嵌入式设备和移动设备上使用的需要和电子战对时效性的要求,本文采用轻量级深度神经网络MobileNetV3,快速准确地提取雷达信号时频图像特征。
MobileNetV3[15]是Google于2019年提出的MobileNet系列的研究成果,作为新一代轻量级深度神经网络,继承了原有的MobileNetV1和MobileNetV2的特点,并拥有许多新特性。MobileNetV3的网络架构可以理解为是基于NAS实现的MnasNet网络[16],引入了MobileNetV1的深度可分离卷积(depthwise separable convolution,DSC)[17]和MobileNetV2的具有线性瓶颈的倒残差结构[18]。MobileNetV3又引入了基于压缩奖惩网络模块(squeeze and excitation,SE)的轻量级注意力模型并设计使用了一种新的非线性激活函数h-swish,可以改进网络的精度。
MobileNetV3定义了2个网络模型包括MobileNetV3-Large和MobileNetV3-Small,分别针对高资源和低资源情况下使用,其网络结构如图3所示,其中,Input表示输入,conv2d表示卷积层,bneck表示倒残差层,pool表示池化层,HS表示h-swish,RE表示ReLU,SE表示注意力模型,NBN表示不使用BN结构。

图3 MobileNetV3网络结构Fig.3 Structure of MobileNetV3 network
从MobileNetV3的网络结构可以看出,网络的倒数第2层(NBN卷积层)的输入为池化层的输出,起到全连接层的作用,该层的输出为时频图像通过网络所提取的图像特征,可用于分类识别实验。
2.1.2 一类分类器SVDD
支持向量数据描述(support vector data description,SVDD)是由TAX[19]等提出的一种基于支持向量机(support vector machine,SVM)的一类分类方法,可以实现已知样本和未知样本的区分,通常应用于异常检测和故障检测等领域。
SVDD先将数据样本X={x1,x2,…,xN}通过φ(xi)非线性映射到高维特征空间并构造一个尽可能包含所有训练样本的最小超球体,即在约束条件下的优化问题:
(4)
约束条件为:
s.t.‖φ(xi)-a‖2≤R2+ξi,ξi≥0,i=1,2,…,n
(5)
式中:N为训练样本总数;‖φ(xi)-a‖为任一点xi到超球体球心a的距离;R为超球体的半径;ξi为松弛变量;C为权衡超球体大小和错误样本个数的惩罚系数。式(4)是个二次规划问题,利用拉格朗日乘子法构造拉格朗日函数进行求解:
(6)
式中αi≥0和γi≥0均为拉格朗日乘子。式(6)分别对R、a、ξi求偏导数,并使其等于0,得:
(7)
将式(7)代入式(6),得:
(8)
式中αi=0占多数,少数αi>0对应的xi为支持向量。
《普通高中生物学课程标准(2017版)》(以下简称新课标)的基本理念是:以“生命观念、科学思维、科学探究和社会责任”学科核心素养为宗旨,内容聚焦大概念,教学过程重实践,关注学生主动参与,关注学生实践,动手结合动脑。教师围绕着生物学大概念来组织并开展教学活动,通过设置合理的教学情境,基于学生动手活动或对资料的分析及探究,将有助于学生对知识的深入理解和迁移应用,有利于促进学生对生物学概念的建立、和应用理解。
式(8)是一个标准的二次优化问题,可得最优解αi。一待测样本Z到超球体中心的距离为:
(9)

(10)
式中xi为任意的支持向量。若f(Z)≤R2,则待测样本Z属于该训练类别;否则不属于。
本文基于SVDD分类器可以在输入数据的高维空间,寻找到一个半径最小的超球体作为决策边界,来对数据进行单分类划分这一特点,将已知调制方式的图像特征作为正类数据,通过SVDD分类器找到已知调制方式的超球体,实现对多种调制方式进行决策分类,判定在超球体内的调制方式,可以认定为闭集内的已知调制方式,反之则是闭集外的未知调制方式,从而完成对雷达信号调制方式的开集识别。
2.1.3 MobileNetV3-SVDD网络模型框架设计
本文设计提出的MobileNetV3-SVDD网络模型,采用MobileNetV3作为雷达信号时频图像的图像特征提取器,将每一个雷达信号经过信号预处理后生成的时频图像,输入到MobileNetV3网络中进行特征提取,将MobileNetV3的倒数第2层(NBN卷积层)的输出作为网络提取的图像特征,维度是1 280,再将提取出的图像特征输入到SVDD进行训练,生成SVDD超球体,具体结构如图4所示。每种已知调制方式都会训练生成一个与之对应的超球体,用来对测试数据进行分类识别。

图4 MobileNetV3-SVDD网络模型具体结构Fig.4 The specific structure of MobileNetV3-SVDD network model
2.2 开集识别的流程
本文根据MobileNetV3-SVDD网络模型,设计了基于MobileNetV3-SVDD的雷达信号调制方式开集识别流程。通过例子对识别流程进行介绍。
假设目前有2种已知的雷达信号调制方式分别为A类和B类,将A类、B类调制方式的雷达信号进行信号预处理生成CWD时频图像,利用MobileNetV3对生成A类、B类调制方式的时频图像进行特征提取,所提取的特征分别对SVDD进行训练,分别得到超球体A和超球体B及其各自的超球体半径RA和RB。
1)将待识别的雷达信号X进行时频分析生成CWD时频图像通过MobileNetV3所提取的图像特征同时输入SVDD超球体A和SVDD超球体B,分别得到该信号到2个超球体球心的距离dA和dB,除以对应超球体的超球体半径RA和RB分别得到超球体球心距离半径比为:
(11)

图5 已知2种调制方式时的开集识别流程Fig.5 Open-set recognition process when two modulation methods are known
比较超球体球心距离半径比kA和kB可以判别其是已知的A类或者B类,还是未知的调制方式;
2)当kA>1且kB>1时,判定雷达信号X为未知类;
3)当kA≤1且kB>1时,判定雷达信号X为已知的A类;
4)当kA≤1且kB>1时,判定雷达信号X为已知的B类;
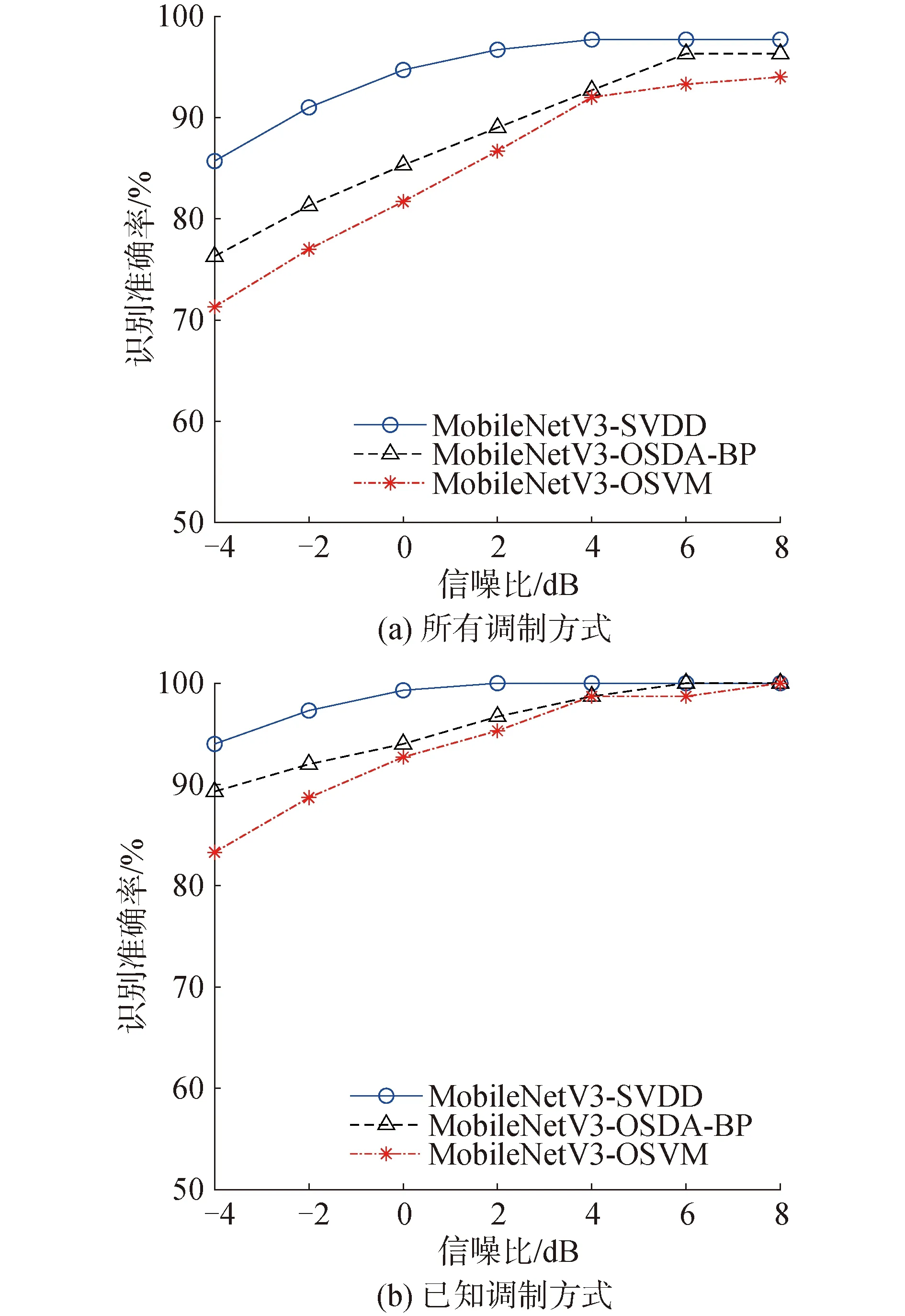
5)当kA≤1且kB≤1时,比较kA和kB的大小,若kA 为了验证本文方法的可行性,对LFM、跳频信号、T1、T2、T3和Frank这6种调制方式的雷达信号进行计算机仿真。 由于在实际应用环境中,不同调制方式的雷达信号具有不同的参数,所以本文采用基于采样频率fs的均匀分布U(·)来确定雷达信号参数。雷达信号的具体参数见表1。实验软硬件环境参数见表2。 表1 雷达信号仿真参数设置Table 1 Radar signal simulation parameter setting 表2 实验软硬件环境Table 2 Experimental software and hardware environment 考虑到实际应用环境中可能出现采集样本数较少的情况,本文将模拟小样本情况下的实验。利用CWD时频分析将6种调制方式的雷达信号变换成不同的时频图像,在信噪比为-4~8 dB内,每隔2 dB生成每类信号的200张时频图像,每个信噪比共1 200张时频图像作为训练数据集。另从不同信噪比点上分别生成50张时频图像,共300张时频图像作为测试数据集。图片的分辨率为224×224像素,对应RGB三通道。 实验先观察MobileNetV3对雷达信号时频图像的图像特征提取能力,将从图像特征提取速度和图像特征有效性2个方面对MobileNetV3-Small模型和MobileNetV3-Large模型进行对比,所采用的指标是相同迭代次数下的训练时间和测试识别率。 在信噪比等于8 dB时,将从训练数据集中取的LFM、跳频信号、T1、T2、T3和Frank共6种调制方式各200张共1 200张时频图像作为训练集,分别对MobileNetV3-Small模型和MobileNetV3-Large模型进行训练。超参数设置迭代次数为50,批次大小为64,学习率为1×10-1。再利用训练好的模型对6种调制方式各50个共300张时频图像进行识别测试,识别测试结果如表3所示。 由表3可以看出,针对本文的数据集,MobileNetV3-Small模型的性能要优于MobileNetV3-Large模型。分析其原因为CWD时频图像以较为简单的图像信息准确地反映了雷达信号调制的固有属性,与其他较为复杂的公开图像数据集相比更适用于MobileNetV3-Small的针对低资源情况下使用的特性。本文所提出的MobileNetV3-SVDD模型结构,实验需要将MobileNetV3-Small模型的倒数第2层(NBN卷积层)的输出作为提取的图像特征,为了验证图像特征的有效性,将其输入到SVM中进行分类识别,结果如图6所示。 表3 MobileNetV3-Small和MobileNetV3-Large的实验对比 图6 MobileNetV3-Small提取的特征在SVM中的识别结果Fig.6 Recognition results of features extracted by MobileNetV3-Small in SVM 由图6可知,使用SVM得到的分类结果验证了文本所提取的图像特征的有效性,其中,SVM的识别率为98.667%高于MobileNetV3网络本身原有的分类层的97.333%,分析其原因为SVM算法相比于其他分类算法的优势主要体现在小样本的学习能力上,SVM算法的复杂度只取决于支持向量的数量,可以有效避免“维数灾难”的问题,得到更高的识别率。 为了验证本文提出的基于MobileNetV3-SVDD的雷达信号调制方式开集识别方法的可行性,能否有效分类识别雷达信号的已知调制方式和未知调制方式,本文从闭集识别和开集识别2方面进行实验。 本文将同时出现在训练集和测试集中的调制方式称为“已知调制方式”,将仅出现在测试集中的调制方式称为“未知调制方式”。在信噪比等于8 dB时,将从训练数据集中取的LFM、跳频信号和T1共3种调制方式各200张共600张时频图像作为训练集,对MobileNetV3-Small模型进行训练并提取图像特征,再将从测试数据集中取的LFM、跳频信号、T1作为3种已知调制方式和T2、T3、Frank作为3种未知调制方式共6种调制方式,每种调制方式各50张共300张时频图像作为测试集,其中,已知调制方式和未知调制方式各150张,通过MobileNetV3-Small模型提取图像特征以备进行识别测试。 1)闭集识别。 为了验证闭集识别无法有效识别出未知调制方式,将上述的训练集和测试集输入到SVM进行闭集识别测试,结果如表4所示。 表4 基于SVM的闭集识别结果Table 4 Closed-set recognition results based on SVM 由表4可知,在信噪比等于8 dB时,SVM分类器可以实现将LFM、跳频信号和T1这些已知调制方式的雷达信号准确识别,识别率达到100%,但是无法将T2、T3和Frank这些未知调制方式的雷达信号准确识别出来,而是会将其误识别为LFM、跳频信号和T1这些已知调制方式之一,不能实现对雷达信号未知调制方式的有效识别,仅能实现对雷达信号调制方式的闭集识别。 2)开集识别。 为了验证本文方法对雷达信号调制方式开集识别的有效性,使用本文提出的MobileNetV3-SVDD模型,先将上述的包含3种已知调制方式的训练集输入到SVDD进行训练,训练生成3个SVDD超球体对应3种已知调制方式,再将上述的包含6种调制方式的测试集输入到这3个SVDD超球体中进行测试识别,结果如表5所示。 表5 基于MobileNetV3-SVDD的开集识别结果 由表5可知,在信噪比等于8 dB时,所有调制方式识别率为97.667%,已知调制方式识别率为 100%,未知调制方式识别率为95.333%,其中,已知调制方式的识别结果为其具体调制方式时视为识别正确,未知调制方式的识别结果为未知时视为识别正确。结果表明MobileNetV3-SVDD模型可以以较高识别率完成对雷达信号调制方式的开集识别。 为了验证本文方法的性能,与文献[10]提出的OSVM算法以及文献[11]提出的OSDA-BP算法进行比较,这2种方法都是使用深度神经网络提取特征后再用分类器进行开集识别。图7展示了本文方法以及2种对比算法在不同信噪比下的所有调制方式识别率、已知调制方式识别率和未知调制方式识别率。 图7 不同信噪比下不同算法的识别率Fig.7 The recognition rate of different algorithms under different signal-to-noise ratios 由图7中可知,本文提出的MobileNetV3-SVDD方法整体上超越了文献[10]和[11]中方法的识别效果,分析其原因为SVDD的一类分类特性使已知调制方式和未知调制方式的分类决策边界更准确清晰。也可以看出所有调制方式识别率、已知调制方式识别率和未知调制方式识别率都随着信噪比的提高而提高,但是在信噪比较高时识别效果上升缓慢且趋于稳定,这是由于在高信噪比时信号的背景噪声逐渐减弱,对图像特征的影响也逐渐减小,于是对方法的识别率影响也逐渐减小。 1)针对雷达信号未知调制方式识别问题,提出了基于MobileNetV3-SVDD的雷达信号调制方式开集识别方法。利用对模型方法进行了计算机仿真实验,验证了其优秀的性能。 2)该方法可以有效识别雷达信号未知调制方式,在信噪比等于8 dB时,已知调制方式识别率均达到100%,未知调制方式识别率均达到95%以上,验证具有优秀的开集识别效果,为雷达信号未知调制方式识别提供了方案。3 开集识别仿真结果与分析
3.1 实验条件及数据仿真

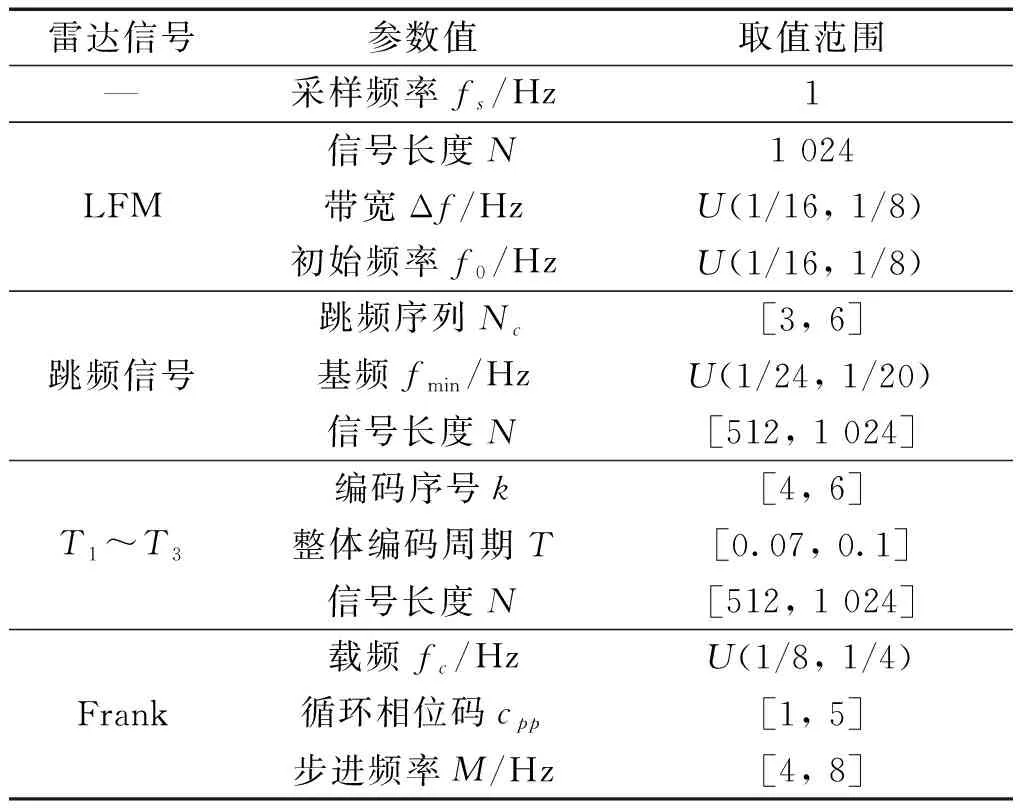

3.2 雷达信号时频图像的图像特征提取


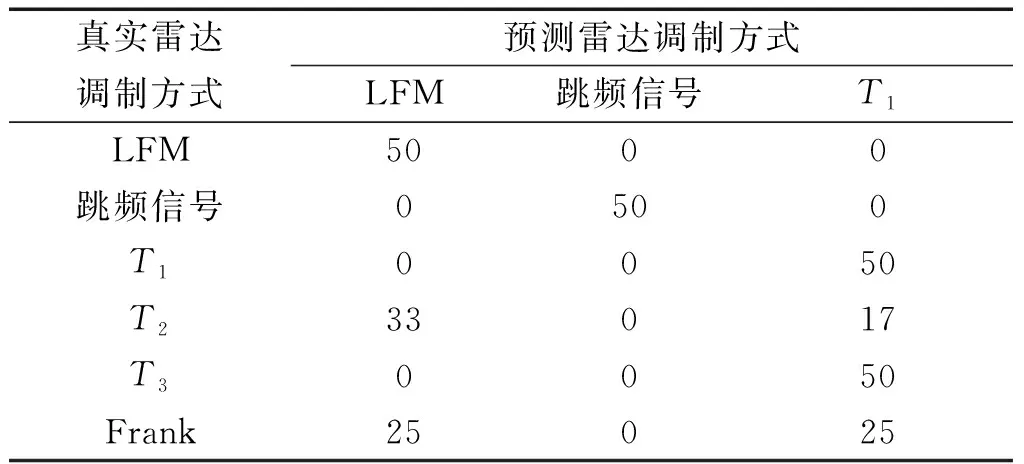
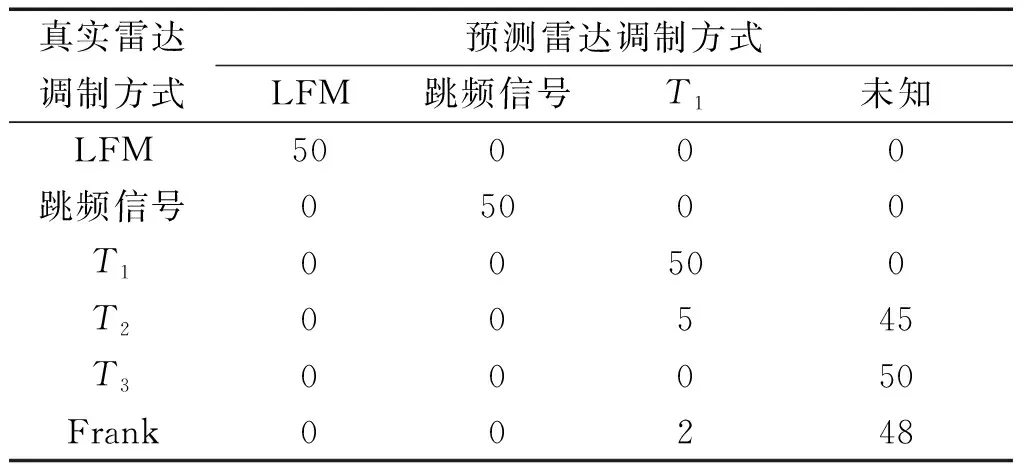
3.3 基于MobileNetV3-SVDD的雷达信号调制方式开集识别
4 结论
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
强度与环境(2021年3期)2021-07-27
数学大王·低年级(2021年4期)2021-04-27
消费电子(2020年5期)2020-12-28
现代电子技术(2020年13期)2020-08-07
兵工学报(2019年2期)2019-03-13
宇航计测技术(2018年3期)2018-09-08
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12