
基于自适应下垂的微电网孤岛运行控制
2022-09-14 06:16张继勇王凯马一鸣杨茂朕李馨雨嵇仁君
电器工业 2022年9期
张继勇 王凯 马一鸣 杨茂朕 李馨雨 嵇仁君
(扬州大学电气与能源动力工程学院)
0 引言
随着社会科技的不断进步,人们对能源的需求量日益增加,导致能源短缺和环境破坏等问题。分布式能源作为清洁能源将成为未来能源主流,但由于其输出的不确定性,易影响电网稳定运行。为了使分布式能源稳定接入大电网,最大化清洁能源的利用率,学者们提出了微电网这一概念[1]。
微电网包含孤岛和并网两种运行模式。当选取传统下垂控制时,母线电压跟随微电网运行状态变化,对输出电能质量产生影响,易造成功率分配不均[2]。
针对上述问题,学者们对下垂控制的控制电压频率进行深入研究。文献[3]提出一种基于储能SOC自适应控制策略,采用分层协调控制,能够维持母线电压稳定,但是控制过程比较依赖通信。文献[4]提出一种改进式负荷功率分配控制策略,无功功率能够被合理分配,但控制器的参数选取较为繁琐。文献[5]提出一种基于低带宽通信(LBC)的改进下垂控制方法,实现了分散控制方案,所有控制能够实现本地控制。
由于微电网孤岛运行状态下,负载端负荷增加会引起微网母线电压降落和频率波动。本文提出一种改进的自适应下垂控制策略,下垂控制系数能够跟随负载变化,减小电压降落量并稳定系统频率。通过MATLAB/Simulink仿真平台对上述控制策略进行仿真实验,实验验证了控制策略的正确性和有效性。
1 微电网的结构
由分布式电源构成的微电网简易结构如图1所示,微电源简化成直流电源Udc,经过逆变器逆变成三相交流电源,并经负载后将功率传输到电网系统交流母线侧。
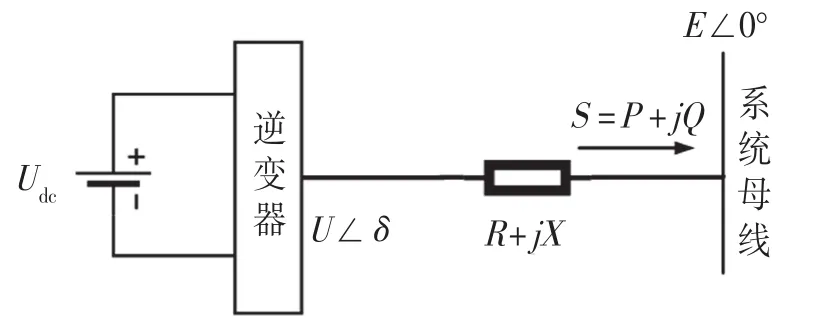
图1 微电网等效电路简图
由图1可知线路上的复功率S为:

将式(2)代入式(1)可得:

根据式(3)可得微电源输出有功功率和无功功率表达式为:

假设线路呈感性,而线路中电阻对于电抗的影响很小,可忽略不计,即可取Z=R+jX≈jX。由极限定义,若δ→0,可取 sinδ→δ,cosδ→1。
由此,式(4)为:

微电网系统要求并入交流母线电压保持恒定,可认为E保持不变。当线路阻抗呈感性和δ很小的情况下,由式(5)可得有功功率P与阻抗角δ有关,无功功率Q与电压U有关。由于:

由式(6)可知,有功功率P与频率f有关,即P由f决定。
2 自适应下垂控制器设计
2.1 传统下垂控制
微电网所接逆变器的输出有功功率P由频率f决定,输出无功功率Q由电压U决定,其存在的线性关系又称为逆变器的下垂特性。下垂特性公式为:

式中,kP、kQ为下垂系数,调节下垂系数可使所接负载的功率分配与额定功率高程度匹配。若下垂系数的绝对值越大,对于负荷的功率分配效果越好,但对于相同有功功率P或无功功率Q的调节会造成对应频率f和电压U的较大偏差。
根据式(7)可得到P-f与Q-U之间的关系如图2所示。
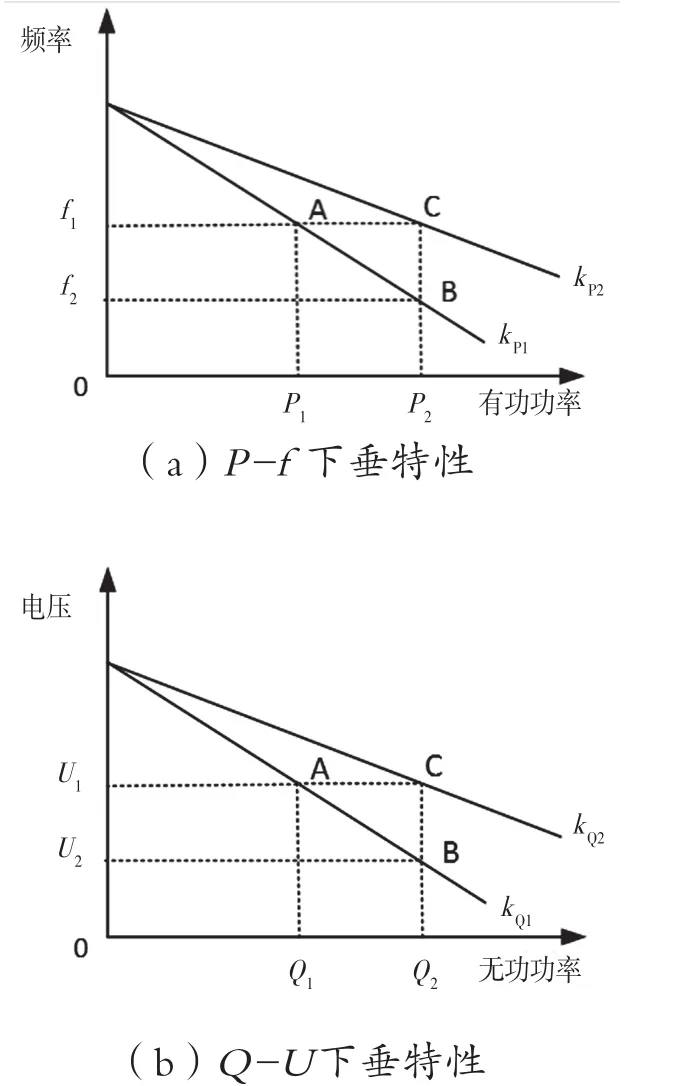
图2 下垂特性曲线
在t1、t2时刻,微电网所接负载的有功功率分别为P1、P2,系统频率为f1、f2。由图2下垂特性曲线可知,有功功率从P1增加到P2(A点移向B点),下垂系数不变,此时对应的频率降低为f2。同理,若微电网所接无功功率增加,母线电压幅值也会相应降低,这会对所接负荷产生不良影响。由于一些电气负载对电压或者频率非常敏感,电压与频率只能小范围的波动。当有功功率增加时,若需要对应的频率变化范围变小,则应适当改变下垂控制中的下垂系数。
2.2 自适应下垂控制
微电网处于孤岛运行模式时,若采用传统下垂控制原理对逆变器进行控制,则微电网所接负载的变化也会影响交流母线电压的变化,会造成母线电压及频率波动,偏离额定值。在微电网中,为使负载中有功功率增加后频率偏移量减小,需要将下垂系数kP转化为具有自适应调节能力的kPP。
由式(7)可得:

将式(8)代入式(7)可得:

式中,PP、PP0为t、t0时刻负载有功功率;kPP为自适应调节的下垂系数,能够根据PP与PP0的变化进行自动调节。为了使分布式能源能够稳定运行,当PP-PP0<Pmin时,取PP-PP0=Pmin;当PP-PP0>Pmin时,取PP-PP0=Pmax。
某些电气设备允许的电压幅值偏移量很小,为了保证设备的正常运行,需要将母线电压的偏移量控制在一定的范围内。当母线电压幅值在[Umin,Umax]范围内时,下垂系数不变,即采用传统下垂控制;当母线电压幅值超出[Umin,Umax]范围时,选用自适应控制,对参考电压值进行调整,从而稳定输出电压幅值。
由式(7)可得母线电压幅值超出[Umin,Umax]范围时的自适应下垂方程:

将式(10)代入式(7)可得:

式中,U为母线电压额定幅值;QQ、QQ0为t、t0时刻负载无功功率;kQQ为自适应调节的下垂系数,能够跟随负载端无功负荷的改变而改变。
上述改进式下垂控制策略能够跟随负载端有功功率和无功功率变化,调节下垂系数,减小母线电压和频率的偏移量。自适应下垂控制器控制框图如图 3所示。
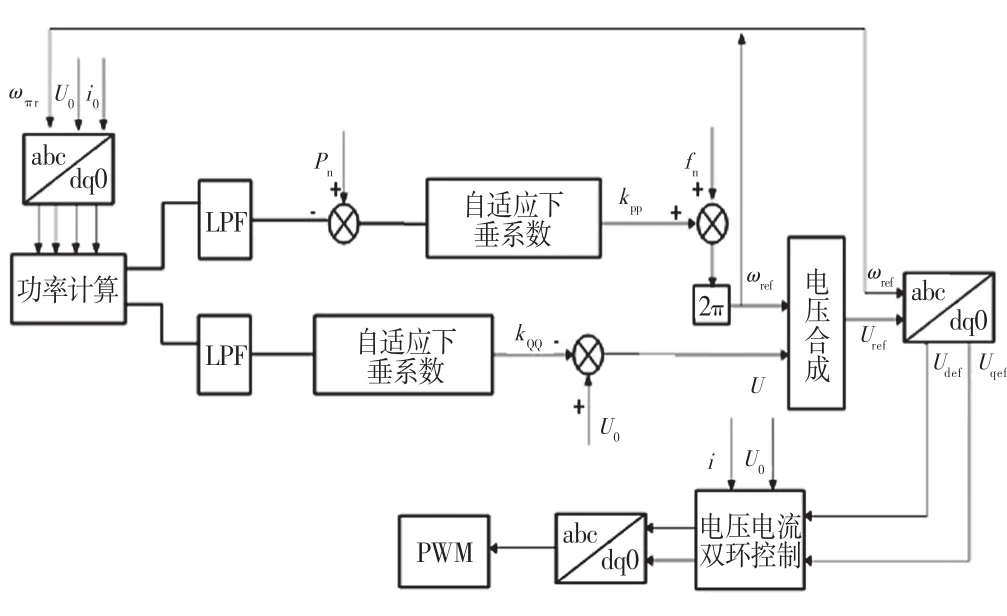
图3 自适应下垂控制器控制框图
3 仿真分析
为了验证本文中所提控制策略的准确性,在MATLAB/Simulink仿真平台搭建了如图3所示的微电网平台,其中的参数如下:额定频率fn=50Hz;无功功率为0时的电压幅值U0=311V;额定有功功率Pn=20kW;本地负载load1的参数为P1=20kW,Q1=10kvar;本地负载load2的参数为P2=10kW,Q2=10kvar;本地负载load3的参数为P3=10kW;Q3=10kvar;L=0.5mH;C=1.5mF;R=0.02Ω。
为了能够明显地观测出负荷扰动下本文所提出的自适应下垂控制的控制方法效果,设置仿真时间为3s。在t=0s时刻,负载端接有本地负载load1,此时微电网达到额定运行状态;t=1s时刻,接入本地负荷load2;t=2s时刻,接入本地负载load3。在负载扰动下观测到负载端电压、电流波形,微电源输出的有功功率和无功功率的波形如图4~图7所示。
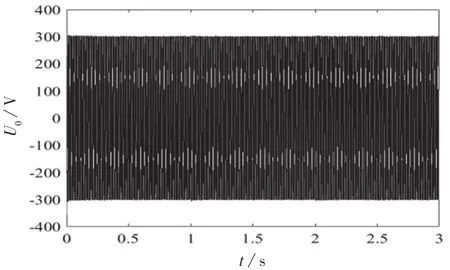
图4 负载端电压
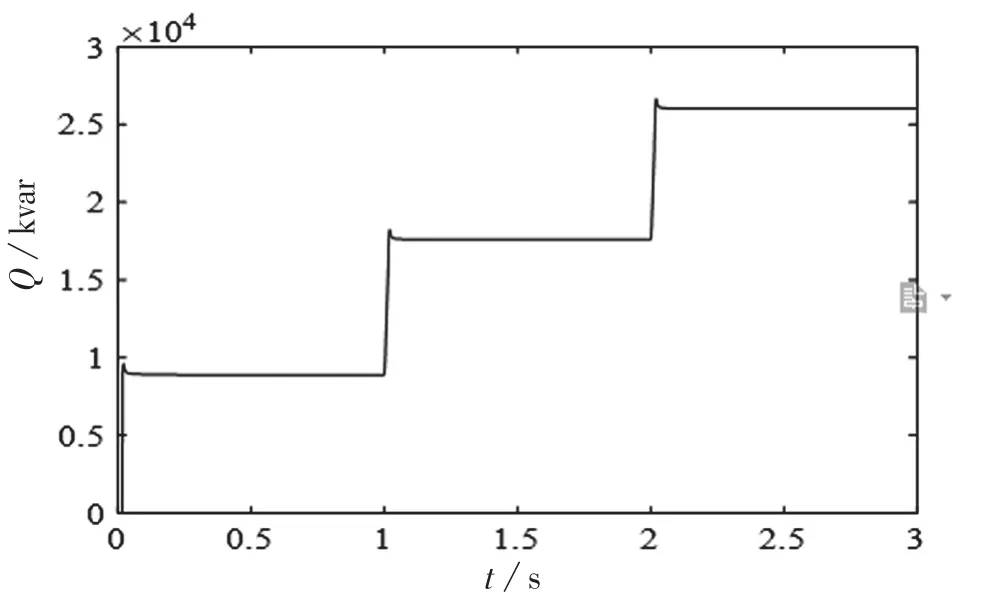
图7 输出无功功率
在0s时负荷load1接入,此时系统达到额定运行状态,此时负载端电流约为30.4A;在1s时负荷load2接入,此时负载端电流约为60.4A;在2s时负荷load3接入,此时电流为89.9A。可以发现,随着负荷的不断接入,有功功率和无功功率增加,负载端电流也在不断增加,电压幅值维持在302V左右。其微电网电压幅值及系统频率如图8~图11所示。
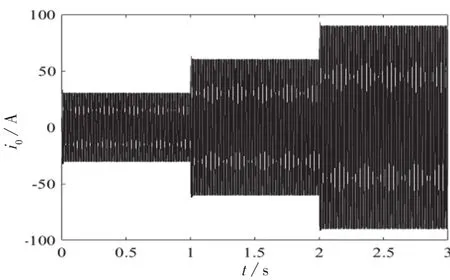
图5 负载端电流
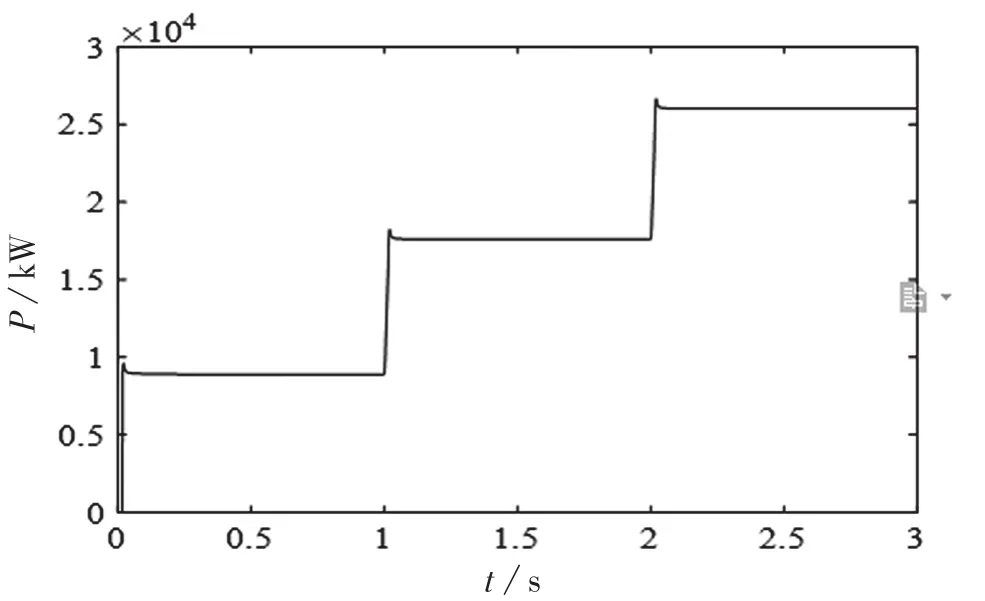
图6 输出有功功率
在1s与2s时,突增负载会增加微网中有功功率和无功功率,采用传统下垂控制的系统频率和电压幅值偏移量较大。由图 8、图 10可知,传统下垂控制下,在接入负载时系统频率下降0.1Hz,电压幅值下降2.1V。由图 9、图11可知,采用本文所提自适应下垂系数控制,在1s与2s时刻系统频率会依次下降0.01Hz,电压幅值会降低0.8V左右。
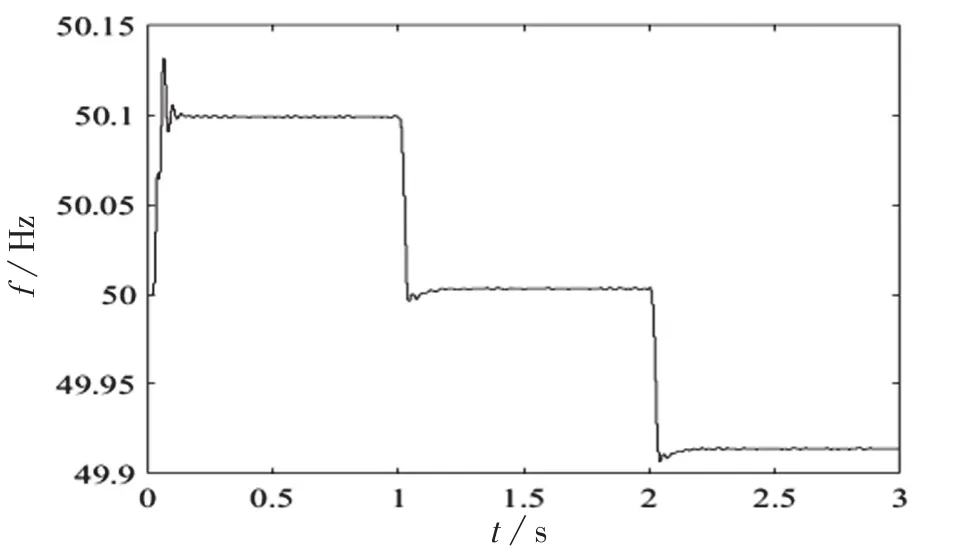
图8 传统下垂控制下系统频率
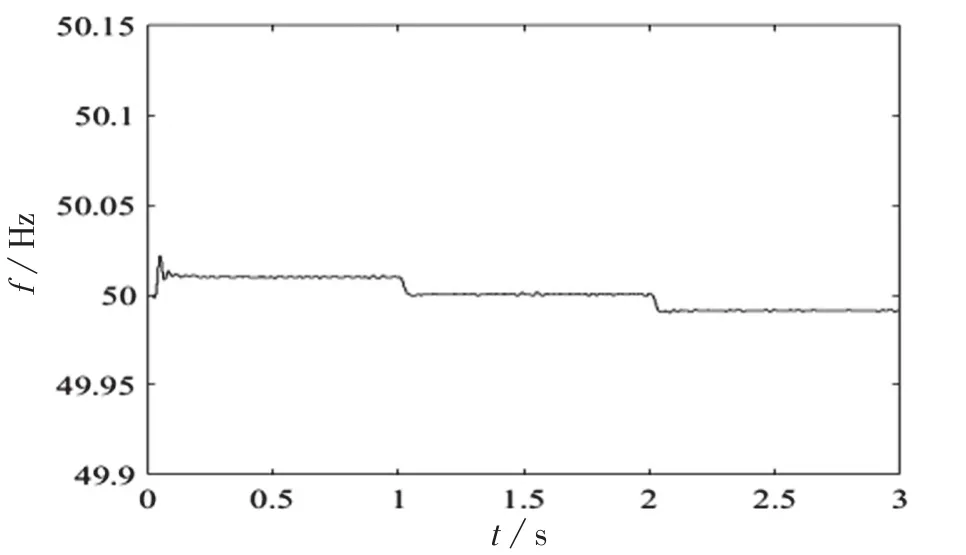
图9 自适应下垂控制下系统频率
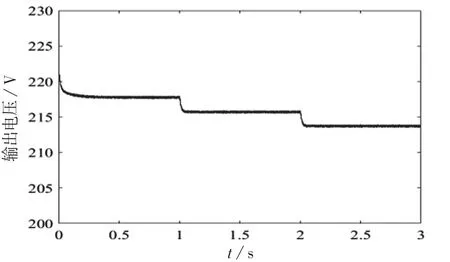
图10 传统下垂控制下电压幅值
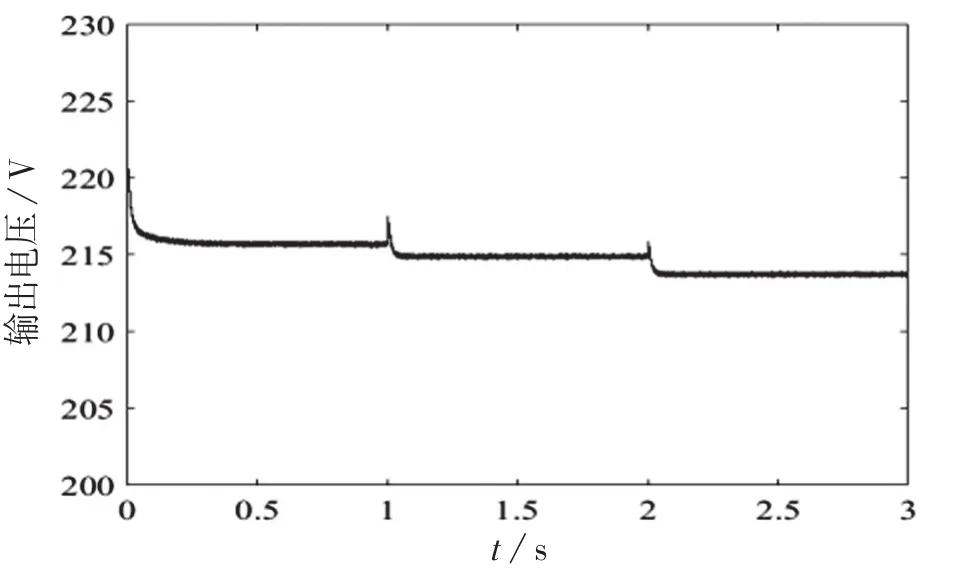
图11 自适应下垂控制下电压幅值
4 结束语
本文所提出的自适应下垂系数控制策略,能够实现下垂系数随着负载端有功功率和无功功率的变化而变化。当微网孤岛系统中电源侧功率过大时,通过增大下垂系数以稳定系统,在短时间内实现功率平衡;当系统中负荷所分配到的功率不足时,能够适当减小下垂系数,以减小系统频率的偏移量。该策略能够将系统频率和电压幅值控制在一定的范围内,提高了孤岛运行下微网的可靠性。
猜你喜欢
电工电能新技术(2022年9期)2022-10-09
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
装备维修技术(2022年7期)2022-07-01
防爆电机(2022年3期)2022-06-17
科技信息·学术版(2021年7期)2021-01-10
课程教育研究·学法教法研究(2018年20期)2018-08-11
电机与控制学报(2018年9期)2018-05-14
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13
