城市干路交叉口右转车辆轨迹流线与曲率特性分析*
2022-09-15 07:32戴振华廖祺硕潘存书尚彦宇徐进
交通信息与安全 2022年4期
戴振华 廖祺硕 潘存书 尚彦宇 徐进▲
(1.重庆交通大学交通运输学院 重庆 400074;2.重庆城市综合交通枢纽(集团)有限公司 重庆 401121;3.中铁二院工程集团有限责任公司 成都 610031)
0 引言
城市道路交叉口是交通流转换、汇集的区域,也是城市路网的节点。在保证安全和效率的前提下,影响交叉口规模的主要因素是交通量和车辆行驶轨迹流线;另一方面,深入理解车辆轨迹流线特征也是交叉口几何设计的基础。在常规设置中,右转机动车一般不受交叉口信号控制,但由于非机动车和行人存在使得轨迹特性更加复杂,与其他道路使用者的潜在冲突点分布更广泛,易产生交织区和车辆碰撞。因此明确不同几何条件下右转车辆通过路径的空间分布、轨迹曲率特性对深化交叉口右转的布局设计、安全设施设置和微观驾驶模型的参数标定有重要意义。
国内外学者在右转交通的几何布局[1]、交通设施设置[2]、信号配时[3]、车辆轨迹[4]做了大量研究。在交叉口几何布局方面,Chen等[5]通过对交叉口右转车辆和行人的冲突建立行为模型,得出大尺寸、大转角的交叉口往往安全性能较低;王雪松等[6]对交叉口几何特征进行安全影响因素分析,总结出交叉口间距越小、转向车道比例越大,事故风险越大的特征。
在交通设施设置方面,赵晓华等[7]以导航数据为基础,对进口道断面特征、信控设施建立结构安全性模型,实现交叉口进口道的风险评估;Chen等[8]应用相对危险度分析了右转机动车和行人的冲突因素,研究发现对行人等待区的渠化可减少车辆延误;郭延永等[9]运用统计检验的方法,对不同的右转交通设施在降低交通冲突的作用上进行了显著性检验;邱锐[10]发现右转车道设置交通岛将增加过街行人的风险,应增加相应措施改善行人安全环境。
在车辆轨迹和曲率方面,Alhajyaseen等[11]利用螺旋曲线和圆曲线对路口内的转弯车辆轨迹曲率进行模型拟合;Yamamoto等[12]研究了轨迹曲率曲线的物理属性,发现多回旋曲线模式有利于提高车辆乘坐的舒适性;徐进等[13]从轨迹曲率切入,研究了回头曲线路段车辆切弯行为和典型过弯方式;Asano等[14]提出车辆轨迹与交叉口几何参数有关,包括转角角度、出口道数量和车辆类型;江昕炜等[15]基于熟练驾驶员轨迹,采用分段多项式对右转轨迹曲线进行非线性拟合;Kawasaki等[16]提出期望速度预测模型来拟合轨迹位置;吴昊等[17]利用统计学分析右转交通空间设计要素,发现转弯车辆车速与路缘半径、是否存在行人过街和道路设计车速有关;在车型对轨迹影响方面,李铁洪等[18]发现车辆在弯道行驶时前后轮的轨迹存在差异,通常轴距越大,内轮差值越大;李维东等[19]对重型大型货车通过圆曲线路段时车身参数与道路宽度的关系进行分析,并利用阿克曼转向原理建立转向模型;徐令选[20]通过对大货车右转过程进行动态仿真,确定多轴货车右转轨迹和视线盲区模型;李英帅等[21]建立公交车右转内轮的行驶轨迹差值几何模型,得出交叉口右转应施划的非机动车禁停区域范围。
综上所述,现有研究偏向于交叉口交通安全宏观评价和对轨迹建立几何模型进行拟合,但对几何特征、交通设施与驾驶行为的深层次关系分析存在不足,在右转车辆轨迹流线特性和曲率模式上缺乏深入研究。因此,本文通过高空视频拍摄和图像分析软件提取了交叉口右转车辆行驶轨迹数据,通过对右转车辆轨迹曲率的计算和分析,得到了不同几何条件下右转车辆的轨迹通过位置分布和轨迹曲率模式,明确了速度对轨迹曲率的影响,研究结果可为城市道路交叉口的几何设计和交通组织提供实测数据支持和理论支撑。
1 数据采集与预处理
1.1 数据获取方法
在重庆市南岸区选取了4个典型信号交叉口,见图1,共包含11个具备右转车道的右转角。其中4处右转角为渠化设计,7处右转角为开放型设计。对右转角进行1~11的编号,利用轮式数显测距仪和卫星地图对各转角的车道宽度、停止线位置等交通设施要素进行测量记录,交叉口右转角的技术参数见表1。利用大疆无人机进行基础视频数据的采集,为保证样本数据能真实地反映信号控制交叉口右转区域的驾驶行为,采集时间选取在天气晴朗的工作日平峰时段,上午09:00—11:00和下午14:00—16:30,避免早、晚高峰交叉口车流量增大对车辆运行的影响,仅对小型客车右转数据和公交车辆进行调查。

图1 交叉口的俯视图Fig.1 Top view of the intersection

表1 交叉口右转角主要技术参数信息Tab.1 Main technical parameters of the right corner of the intersection
将无人机采集到的各右转区域高空视频导入至Data From Sky软件进行分析,该软件默认像素坐标为参考系,可以获取视频中车辆的实时速度、加速度、车头时距等运动特征信息。为确保导出的数据能真实反映右转车辆的轨迹特性,使用前需要进行地理配准将像素坐标转化为WGS-84地理坐标,将数据观测时间间隔频率设置为30帧/s,导出视频中通过的车辆轨迹坐标、速度、时间等数据至Excel。经过验证,地理配准后的位置坐标数据与真实坐标的平均相对误差在0.1 m以内[22],精度满足研究需要。最后将输出的车辆轨迹信息与高空视频图像进行对比,对采集过程中目标跟踪丢失导致数据异常的车辆轨迹信息进行剔除。
1.2 数据预处理
将提取的车辆中心点坐标来指代车辆行驶轨迹,通过对中心点轨迹坐标的平滑连接绘制出轨迹线并计算其轨迹曲率,采用的曲率计算方法为三点确定法。假定车辆轨迹由多段具有不同曲率的曲线组成。假定P(i)为车辆第i点的位置坐标,P(i)与相邻2点P(i+1)与P(i-1)共同构成1段曲线,通过余弦定理和平面几何可计算出该段曲线的圆心O(i)和半径R(i),曲率K(i)是R(i)的倒数(即K(i)=1/R(i))。图2展示了右转车辆轨迹曲率的计算示例以及最终成果。计算出轨迹上各点的曲率可得到最终的轨迹曲率。
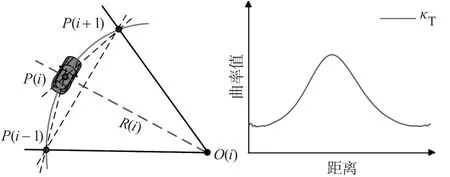
图2 轨迹曲率计算示意图Fig.2 Schematic diagram of trajectory curvature calculation
为了保证计算得出的轨迹曲率线能够尽可能反映真实的变化趋势,将三点确定法中P(i)的前后相邻采样间隔设置为[10,60]区间。例如当i=10时,开始第1次计算轨迹曲率,此时相邻2点选取分别为第1点和第20点的坐标位置;当i=11时,选取的相邻2点为第1点和第21点,以此类推。随着i的增大采样间隔也依次增大直至临界值60,以保证最终的轨迹曲率曲线的完整性和光滑性。
2 右转车辆轨迹束分布特性
针对采集到的右转车辆轨迹数据,截取落在圆曲线以及前后直线段范围内的轨迹部分,然后将有效轨迹线和路面标线坐标叠加在同一坐标系内,运用样条插值函数将轨迹点拟合成连续且光滑的曲线以便后续的间距值计算。标识出交叉口右转角的几何参数,见图3。其中θ为交叉口转角角度,(°);R为交叉口路缘半径,m;将转角圆曲线要素设计中与直线2个主要交点依次称为直圆点(ZY点)、圆直点(YZ点),沿路径方向作经过2个交点垂线建立截面1和截面2。
而对于唯一性问题,1999年, Mischler和Wennberg首先在硬势和角截断条件下得到了一个最优的结果,即如果初值质量和能量有限, 能量保持守恒的解一定是唯一的[8].但是Wenenberg通过具体的例子表明方程存在能量增加的解[9].Toscani和Villani利用概率空间里的一个距离在麦克斯韦势、非角截断条件下得到了解的唯一性[10].最近,Desvillettes和Mouhot在初值满足一定条件下,在硬势及非角截断情形下得到了解的唯一性[3,11].
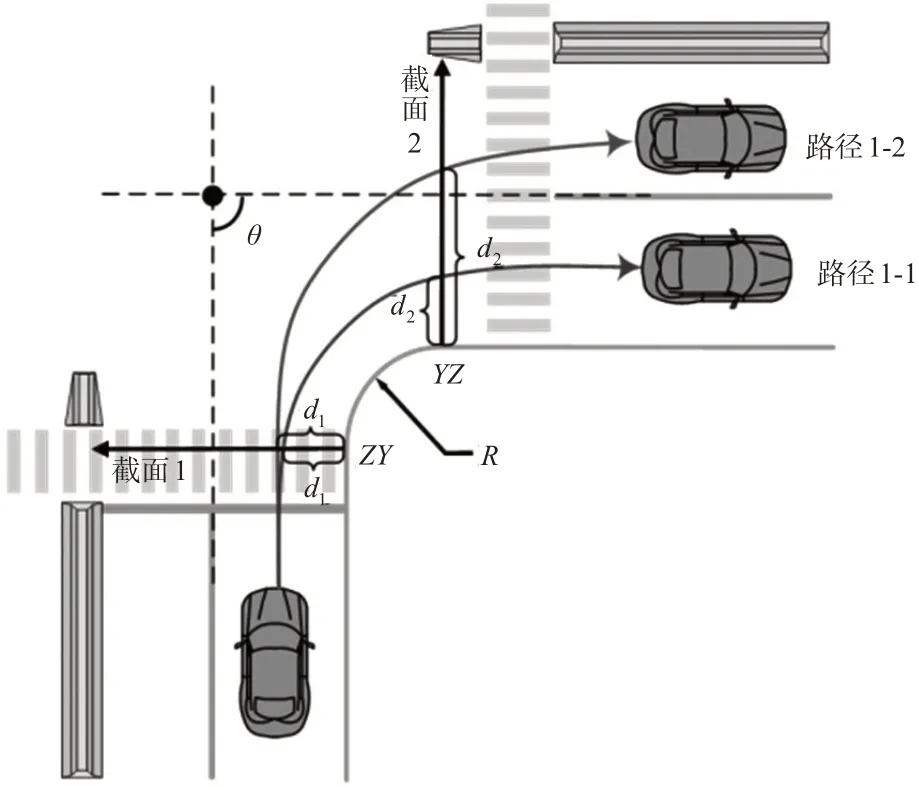
图3 交叉口右转角几何参数定义示意图Fig.3 Definition of geometric parameters of the right corner of the intersection
2.1 几何布局对轨迹分布的影响
右转车辆轨迹与道路几何布局有密切关系。为探究不同交叉口几何条件下的轨迹分布特性,选取9,10,11号右转角(车道宽度分别为3.25,3.5,3.75 m)作为范例来研究路缘半径对车辆通过分布的影响,选取2号和3号转角分析右转专用道对车辆通过位置分布的影响,图4为上述交叉口选取的右转角轨迹束曲线。

图4 交叉口右转车辆轨迹束Fig.4 Trajectory of right turn vehicles at intersection
采用轨迹线-车道边缘线间距值d作为衡量车辆右转时轨迹分布特性的指标,间距值d是指:右转车辆通过截面1和截面2时,车辆中心点与右转车道边缘线之间的距离。在不同转角路缘半径和有无渠化下右转车辆通过2个截面的位置分布概率和累积分布概率见图5~6。

图5 不同路缘半径下截面通过位置分布图Fig.5 Distribution of cross-section passing position under different curb radii
由图5(a)可见:当路缘半径为15 m和25 m时,车辆驶离进口道的通过位置均值分别为1.39m和2.04m,11号转角的入口车道宽度更大是1个重要原因,同时也可以发现半径小的转角由于其曲率变化更明显,此时右转车辆的轨迹流线更易体现出提前入弯的趋势,即车辆通过截面1进入圆曲线的间距值会变小。由图5(b)可见:路缘石半径为15,25 m时,轨迹线-车道边缘线间距值d在均值上无明显差异,从分布形状来看,半径为25,15 m通过位置的标准差分别为0.74和1.09,这是因为后者出口车道数更多,车辆存在更大的路径选择空间;前者通过位置最小间距值大于后者且分布在2~2.5 m区间概率更大,可能是因为大半径转角的可以让驾驶人更容易地以较高速度完成右转。从视频观测发现,大半径转角易占用进口道相邻车道,从而增加直行车辆和对向左转车辆冲突的可能性,可设置右转专用相位以减小右转车辆对其他流向车辆的干扰。
2.2 渠化设计右转专用道对轨迹分布影响
为对比右转专用车道对轨迹分布的影响,图6给出了2号、3号转角内车辆通过截面2的位置分布,由图6(a)可见:2号转角车辆穿越截面2的轨迹分布标准差为0.56,其中穿越位置小于2.2 m的累积概率为84.6%;相同半径下,无渠化设计和专用车道的3号转角轨迹分布位置标准差为1.11,在截面2的通过位置分布在2~8 m,分布形态表现出较大的离散性,且与路缘线间距的起始值增大。由图6(b)的平均速度曲线可见:这可能是因为线形缓和的转角视野更开阔,有利于车辆加速出弯,从而增大轨迹分散程度。
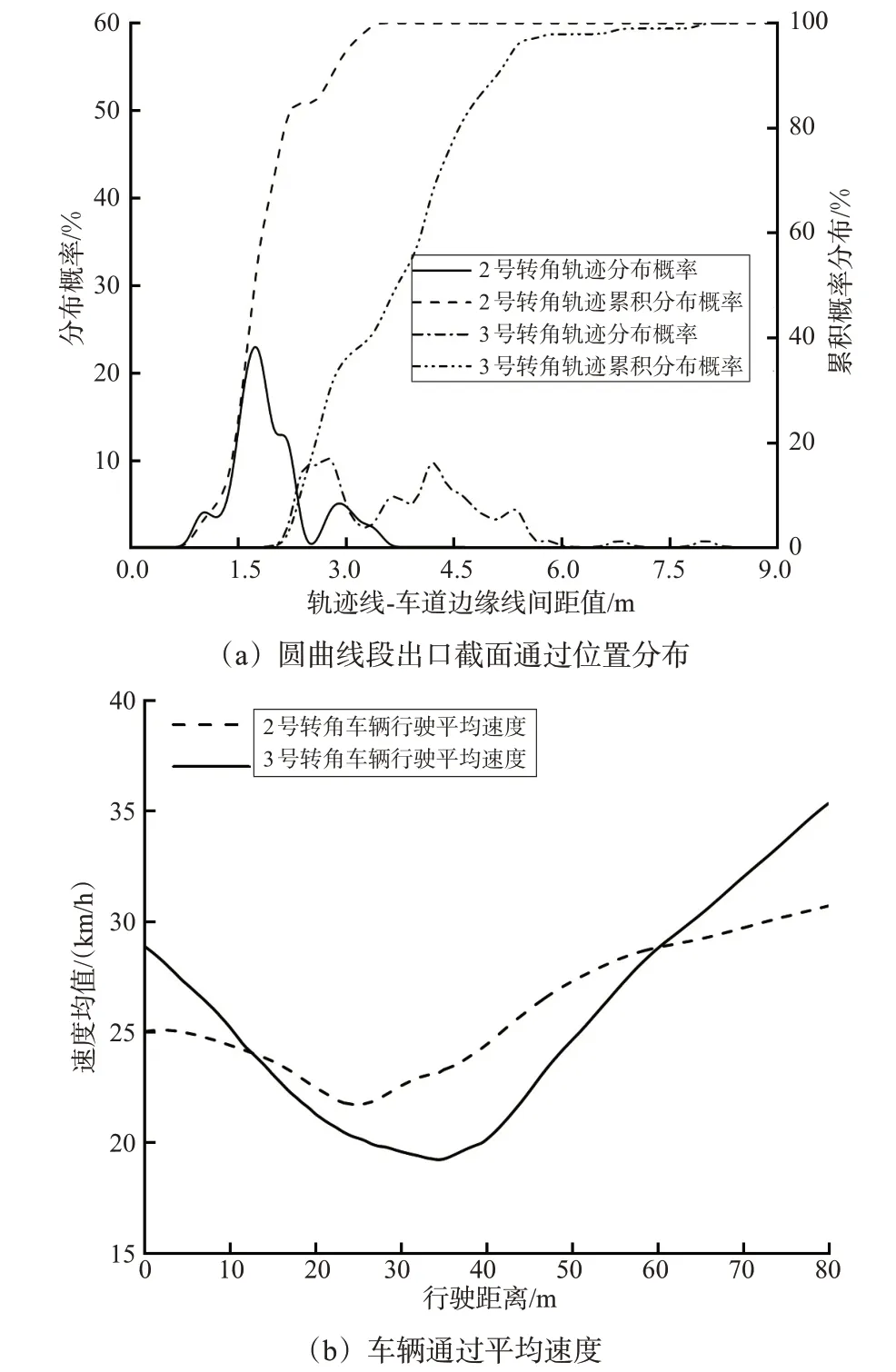
图6 第2号和3号转角通过位置分布与通过速度Fig.6 Passing position distribution and passing speed at No.2 and No.3 right corner
可以得到下述结论:有渠化安全岛设计的右转专用车道有利于收缩轨迹分布范围;无渠化设计的转角车辆轨迹分布范围更广,增大了潜在冲突点的数量,该研究结论可应用于渠化适用性论证。
2.3 大型车辆右转轨迹分布
影响汽车转弯半径的因素还包括车辆自身特性,包括轴距、轮距,以及转向盘最大转向角。通常轴距越长,转弯半径也随之增大。城市道路的小型车辆轴距常见为2.4~2.6 m;城市中大型车辆代表车型是公交车,以重庆公交车辆参数为例:其车辆轴距5.05 m,车辆前轮距2.05 m、后轮距1.86 m,车身长度10.5 m。为探究不同车型下的轨迹流线特性,对金开大道-斑竹路西进口道2 h内采集到的右转车辆车型分类,每种车型选取相等样本量并描绘出轨迹分布范围,见图7。
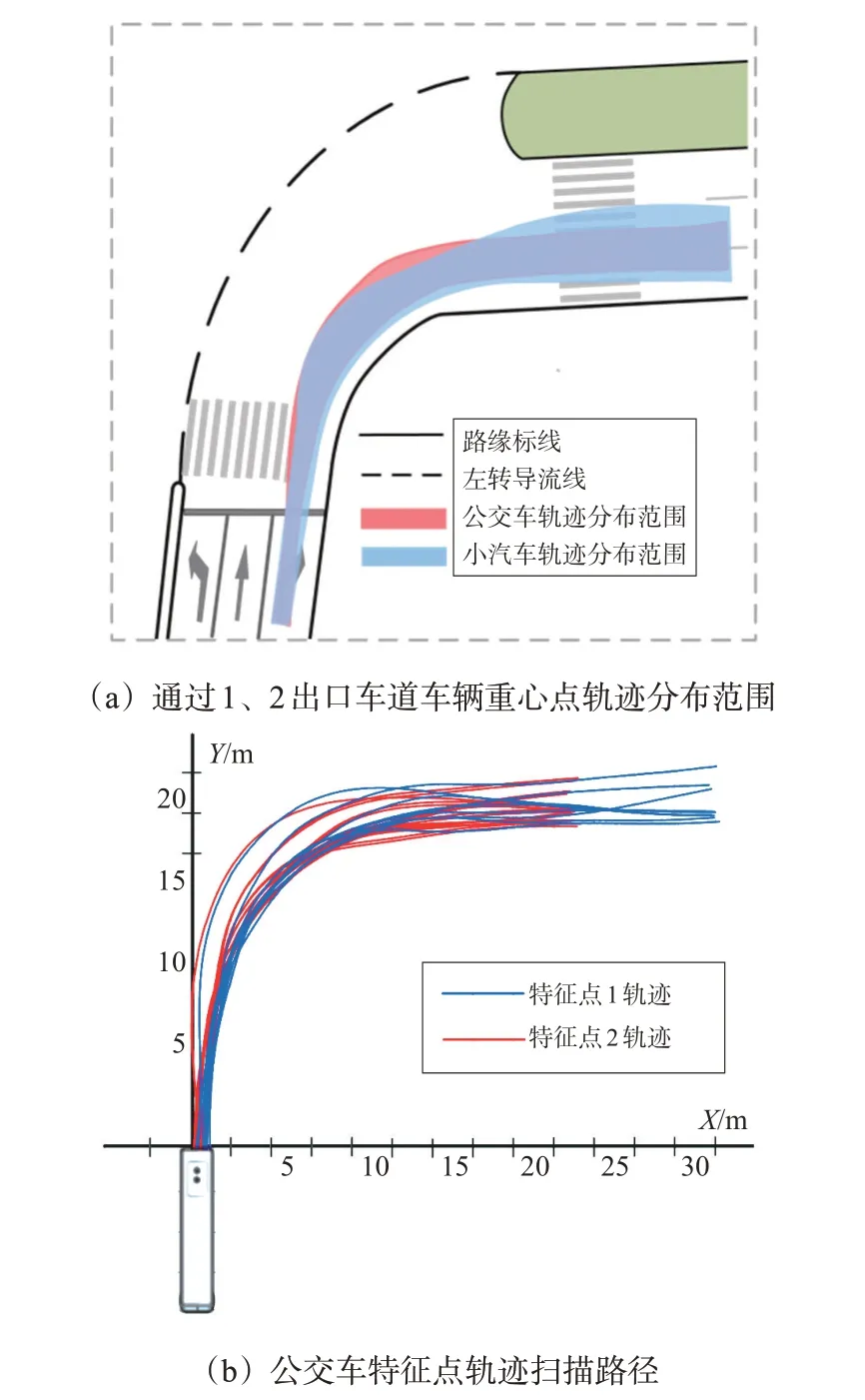
图7 不同车型的右转轨迹分布范围Fig.7 Distribution range of right-turn trajectories of different models
公交车通过截面2的均值为2.41 m,标准差为1.11,小型汽车通过截面2的均值为2.98 m,标准差为1.69。这是因为公交车在转向时车身轴距长、灵活度低,因此在通过时轨迹半径和通过截面2的起始值相较于小型车更大,但职业驾驶员在圆曲线段段行驶会严格控制行车速度确保安全转向,同时选择较外侧的车道来减少停靠站所需横向移动距离,因此轨迹离散度相对较低;而小型汽车速度离散程度大,转向灵活,因此轨迹分布范围更广泛。
将公交车辆简化为质点无法体现车身对转向影响,因此将其视为刚体并把左右两侧轮胎简化集中到车身中轴线,形成公交车辆单轨模型,提取车身前后2个特征点1和2,定义坐标系描述车辆转向运动,可以看到公交车在转向过程中的运动学轨迹以及内轮差的形成过程。
因此在公交车转向需求大的交叉口,可以在出口道断面设计中对外侧车道进行适当加宽,保证大型车辆右转的顺利通过,同时对交叉口混合区进行安全设施设计,提高非机动车和行人出行的安全性。
3 右转车辆轨迹曲率特性
3.1 交叉口右转轨迹的曲率特性
为了明确不同右转路径下轨迹曲率间的差异,对交叉口9号、10号右转车辆车道路径进行编号,将进口道编号为1,出口道的内侧车道、中间车道和外侧车道分别编号为1,2,3,则1-1代表右转进口道到最外侧车道;1-2代表进口道到次外侧出口道;1-3代表进口道到内侧出口车道。图8给出了2处转角不同车道路径下的轨迹曲率,其中κR为轨迹曲率,κT为道路设计曲率。

图8 不同出口道选择下的轨迹曲率形态Fig.8 Trajectory curvature patterns under different exit lanes
由图8可见:同一车道路径下的轨迹曲率变化曲线类似,关键点对应的行驶距离基本一致,不同出口道路径下的轨迹曲率与路缘转角设计曲率存在差异。总体来看,选择出口车道越靠近内侧,其轨迹曲率的形态越平缓,总体的峰值呈现下降的趋势。显然仅通过比较轨迹曲率峰值和道路设计曲率的大小并不能判断右转车辆的车道选择行为,为了揭示轨迹曲率与车道选择的相关关系,采用等效半径来描述右转轨迹曲率的整体过弯效果。等效半径指右转车辆轨迹半径的等效值,计算方法是对圆曲线路段内所有曲率值点的均值求倒数,可以用来衡量圆曲线内过弯行为舒缓效果程度[13]。

式中:κeq为等效曲率,是落在圆曲线2个主要点间的轨迹曲率平均值;n为落在圆曲线转角范围内的轨迹曲率值个数。
经过计算,选择9号交叉口内侧、中间和外侧车道时等效半径均值分别为22.93,25.55,30.29 m;10号交叉口Req均值分别为23.57,25.60,27.56 m。符合内侧车道行驶所需半径大于外侧车道半径的实际情况。因此可以通过等效半径Req对车道选择行为进行判断。
3.2 右转轨迹的曲率形态特征
针对样本交叉口的11个右转角,逐一计算出右转范围内连同入弯前以及出弯后轨迹曲率的连续变化。可以看到轨迹曲率在形态上具有一般特征,即随着行驶距离的增加,右转车辆轨迹曲率从0开始上升达到曲率峰值,随后从曲率峰值减小至0点。相应地轨迹曲率与转角设计曲率存在2个相交的关键点,即轨迹曲率开始持续增大和减小时的2个曲率零点,可以看到2个关键点与转角设计中的ZY、YZ点并不在同一位置。另外,曲率在同1个交叉口轨迹曲率在形态特征上也存在差异,根据轨迹曲率升降的速度和峰值停留的距离划分为6种形态,表2展示了不同的轨迹曲率形态的特点和常见的道路驾驶行为。
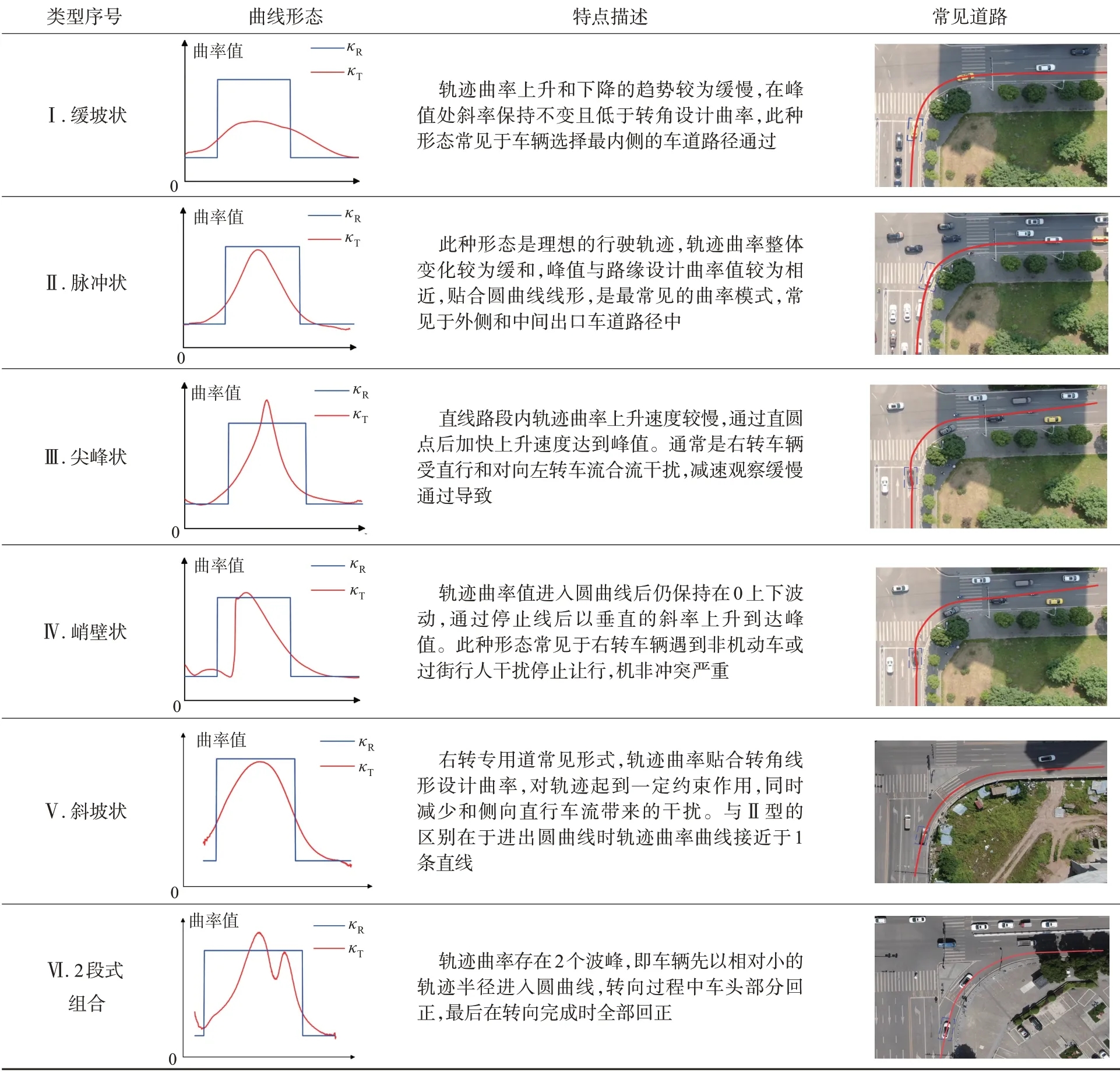
表2 轨迹曲率形态特征表Tab.2 Trajectory curvature morphological feature table
总的来说,大部分车辆会在进入圆曲线前的直线路段调整车头方向提前进入过弯状态;轨迹曲率保持上升趋势且在转角的中心处到达峰值,随后开始降低;在驶离圆曲线YZ点后轨迹曲率值并不会立马停止,而是继续保持缓慢下降趋势,因为驾驶员驶离圆曲线后仍需继续调整车身位置以适应直线路段。在传统的交叉口平面曲线要素设计中,一般将转角的线形设计为单圆曲线,为更贴合车辆右转轨迹曲率的变化趋势,可以对右转车道进行缓和曲线-圆-缓和曲线的复合曲线设计,提高行车稳定性和乘车舒适性。
3.3 行驶速度对轨迹曲率的影响
影响右转轨迹特征的有交叉口几何布局、机非冲突,以及车辆类型等。以上影响因素作用的最终结果体现为对车辆行驶速度的干扰,为了更好地理解速度与轨迹曲率的潜在关系,采用曲率变化率来表达车辆的实时过弯情况,与右转的行驶速度进行相关关系分析。图9为轨迹曲率与行驶速度相关性。
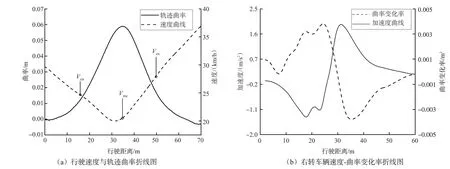
图9 轨迹曲率与行驶速度相关性分析Fig.9 Correlation analysis of trajectory curvature and driving speed
图9(a)给出了右转车辆过弯运行速度与轨迹曲率之间的相关关系,可以发现轨迹曲率的变化趋势与右转速度变化趋势整体相反,为了进一步量化二者之间相关关系,计算提取出轨迹的加速度与轨迹曲率变化率,对2条曲线进行内插以获得均匀距离间隔的成对输出数据组,见图9(b)。利用Matlab软件corrcoef函数计算出2条曲线的相关系数为-0.843 5,因此轨迹曲率的变化快慢与车辆行驶加速度呈显著的负相关关系。
为了深入分析车辆速度对轨迹曲率的影响,可用等效半径来描述右转车辆的整体过弯效果,并选取了多项速度相关指标来描述二者具体相关关系。其中Ven为圆曲线ZY点上游路段5 m位置的速度值,Vmc为弯中速度值,Vex为圆曲线YZ点下游路段5 m位置的速度值,以二塘路-汇龙路西进口道和北进口道的右转车辆为例,统计结果见图10。
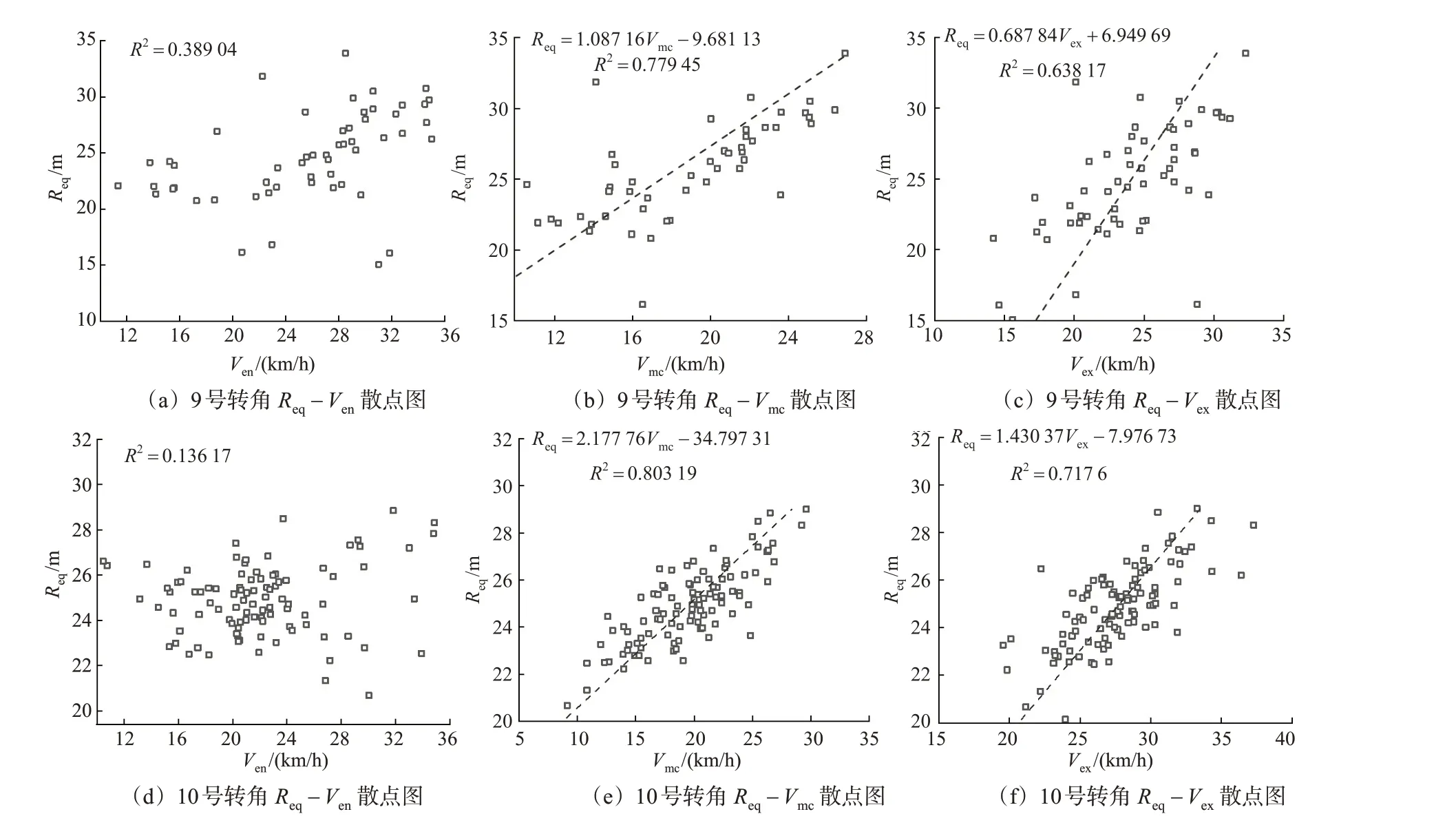
图10 行驶速度对等效半径的影响Fig.10 Influence of speed on equivalent radius
图10展示了速度与等效半径的相关关系,可以发现Req对弯中速度Vmc和出弯速度Vex的变化比较敏感且呈正相关关系,即速度越大导致轨迹等效半径越大;而入弯速度Ven与等效半径相关关系较弱,不存在线性关系。根据上节研究内容可知,不同的等效半径对应着不同的车道路径选择,可以得出结论:车辆轨迹半径与过弯时的速度有显著正相关关系,当转角缘石半径增大时会导致车辆转弯速度较高,减小路缘半径不但可以压缩转向车流的速度,还可以减少过街长度提高行人过街安全性,该结论可为交叉口路缘半径设计提供数据支撑。
4 结束语
1)路缘半径、车道宽度和出口车道数对车辆通过截面的间距值和离散程度存在影响,出口车道数越多通过位置越离散。
2)渠化设计的右转专用道对可以限制轨迹分布范围,提升通行效率;公交车较小型汽车的轨迹离散程度更低,通过截面2间距均值分别为2.41 m和2.98 m。
3)不同出口车道的轨迹曲率存在差异,且轨迹曲率变化的关键点与转角线形设计的主要点不完全一致,体现在曲率变化通常存在入弯提前和出弯延后的状态;通过聚类分析得到6种右转轨迹曲率形态,并对每种形态的驾驶行为进行识别。
4)加速度与曲率变化率呈负相关关系,相关系数为-0.843 5;过弯时的速度对轨迹半径有显著正相关关系,即弯心速度越快,选择的出口车道越靠近相对内侧。
根据研究结论,可以在交叉口右转角规划设计中考虑以下建议:①右转交通量大时可采用渠化岛设计使右转车辆快速汇入主路并减少直右交通冲突;②对需要提高右转通行效率的中大型交叉口,可将右转车道线形设置为复合曲线,让设计曲率贴合轨迹曲率变化,提高右转车辆舒适性和稳定性。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
新疆大学学报(自然科学版)(中英文)(2022年3期)2022-06-04
现代青年·精英版(2022年3期)2022-04-06
昆明医科大学学报(2022年1期)2022-02-28
建材发展导向(2021年19期)2021-12-06
汽车工程(2021年12期)2021-03-08
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
天津建设科技(2020年2期)2020-05-13
东方教育(2017年19期)2017-12-05
安徽冶金科技职业学院学报(2015年3期)2015-12-02