
基于三维力传感器的工业机器人力控应用*
2022-09-17 15:54李萍萍
科技与创新 2022年18期
彭 浩,李 昕,周 立,李萍萍
(华中科技大学工程实践创新中心,湖北 武汉 430074)
随着“中国制造2025”的深入推进,工业自动化、信息化、智能化已经发展到前所未有的高度,工业生产效率、生产成本得到了极大改善。工业机器人技术得到了迅速发展和应用,主要应用于汽车及其零部件制造、机械加工、电子、物流、食品医药等生产制造领域。工程实践认知教学紧贴工业社会发展实际,将工业机器人技术应用融入实践教学课堂,为培养符合工业社会发展趋势的卓越工程技术应用人才提供支撑。
华中科技大学工程实践创新中心依托智能制造平台建设,引入学校科研成果市场化产品华数机器人应用于实践教学,硬件设施主要包括40 套理实一体化工作站、10 套HSR-JR605 工业机器人综合应用平台、8套HSR-JR612 工业机器人装调平台以及工业机器人核心零部件和4 台典型工业机器人认知平台。主要开设了工业机器人基础应用训练、工业机器人综合应用训练、工业机器人视觉应用训练和工业机器人机械装调训练等实践课程单元。承担了全校工科专业及部分文、理、医相关专业本科生的“工程训练”课程实训任务。其中实训过程的主要特点和突出矛盾是高频率、零基础操作对设备性能和安全的要求。具体讲就是学生频繁的误操作导致设备撞机对机器人本体和末端夹具的损坏,为此将夹具与六轴法兰连接处加装带力控功能传感器就能很好解决此类问题。力控原理及控制流程如图1所示。

图1 力控原理及控制流程
1 力控传感器的原理及选型
力控传感器也被称为应变式三维力传感器,由弹性元件、电阻应变计和惠斯通电桥电路组成。物体作用在弹性元件上使其变形而产生应变量,粘贴在弹性元件上的电阻应变计将与物体质量成正比的应变量转化为电阻变化,再通过惠斯通电桥电路将电阻变化转化为电压输出,利用显示仪表测得此电压输出值即可完成测量计量任务[1]。三维力传感器可以同时检测X、Y、Z方向上力值的变化情况,同时输出3 组电压信号,三维力传感器如图2所示。此次研究测试选择的是HSR-JR605 型六关节工业机器人,末端负载5 kg。测试主要采用手动、自动、外部3 种模式,对安装于六轴法兰与机器人快换夹具之间的力传感器进行尝试性递增动态碰撞。因机器人运动涉及速度、加速度、本体自重、夹具质量、运动姿态等众多因素[2],导致碰撞产生的力变化区间较大,通过估算选择了一个FX、FY、FZ量程分别为200 N 的力控传感器,防止过载对传感器的损坏。3KD60-200 型传感器主要技术指标参数如表1所示。

表1 KD60-200 性能参数

图2 三维力传感器
2 三通道放大器与模拟量采集卡
本次选用的HSGA3 三通道应变式放大器(如表2和图3所示),特别适用于放大处理应变式传感器信号的数据,每个通道独立可调,接收三维力传感器输出的mV 信号,经过放大后输出+/﹣10 V(零点为0 V)模拟量应变电压。模拟量采集卡选用的是与华数机器人HIO-1100 单元匹配的HIO-1173 采集卡(如图4所示)。HIO-1173 模块负责完成经放大器放大后的电压输入到工业机器人控制系统的A/D 信号输入,模拟量输入通道的输入电压范围为﹣10~0 V/0~+10 V。每个A/D-D/A 模块提供4 通道16 位差分/单端模拟信号输入和4 通道16 位差分/单端模拟信号输出。本模块为HIO-1100 单元的功能子模块,需配合HIO-1100 单元的底板和通讯板使用。
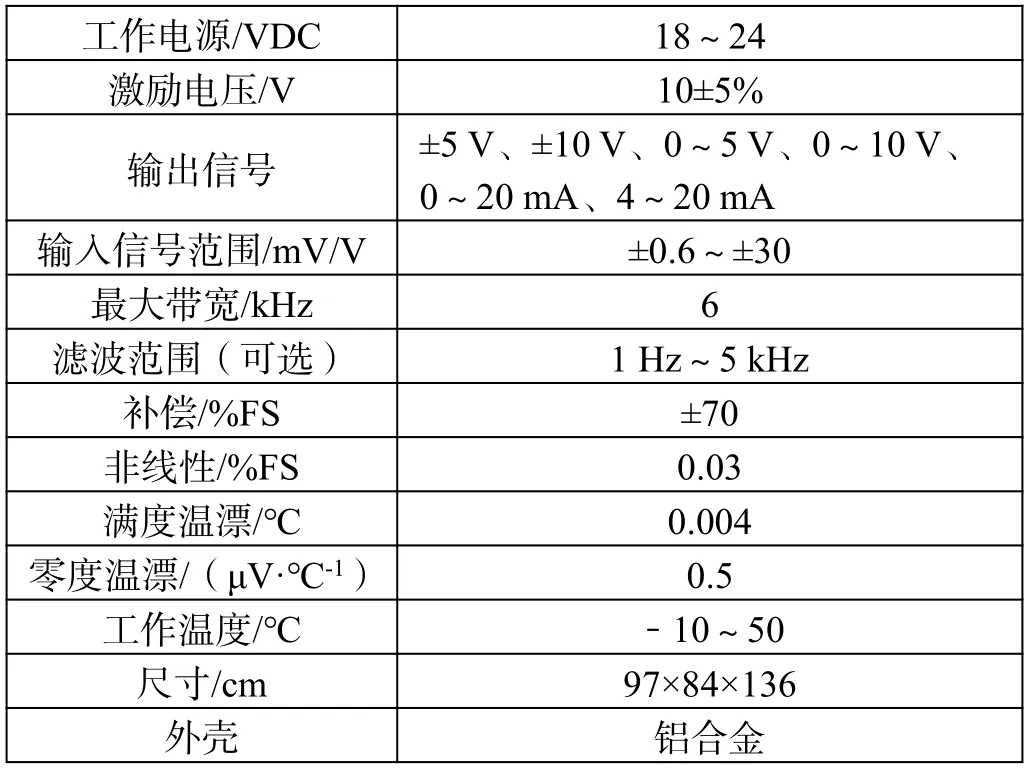
表2 三通道放大器技术指标参数

图3 三通道放大器

图4 HIO-1173 采集卡
3 工业机器人X、Y、Z 方向拉、压碰撞保护流程
HSR-JR605 华数机器人打开使能开关(上电)后,分别在手动、自动、外部3 种模式下运动,底层程序循环检测工业机器人的运动状态,一旦发生不同程度的碰撞,三维力传感器将力转换为电压经放大后,底层程序自动判断并做出二级故障或一级故障的响应中断使能,故障级别如表3所示。二级故障由程序判定为轻微碰撞,由学生自行操作打开工业机器人使能开关解除故障,一级故障由程序判定为严重碰撞,需要教师关闭PLC 通信底层程序的运行来解除故障,控制保护流程如图5所示。

表3 故障级别

图5 控制保护流程图
针对不同种类工业机器人、力控传感器、应变式放大器硬件性能,使用过程中需对工业机器人运动速度加以限定。底层控制程序如下:
IF IR[96] =0 THEN '首次误操作造成撞击电压在(1,3]or[-3,-1)
IF A_IN[1] > -3 AND A_IN[1] < -1 OR A_IN[1] < 3 AND A_IN[1] > 1 AND OMANUAL_MODE = ON THEN ' 通道X 模拟量触发 手动模式断使能
IR[97]=1
END IF
IF A_IN[2] > -3 AND A_IN[2] < -1 OR A_IN[2] < 3 AND A_IN[2] > 1 AND OMANUAL_MODE = ON THEN ' 通道Y 模拟量触发 手动模式断使能IR[97]=2
END IF
IF A_IN[3] > -3 AND A_IN[3] < -1 OR A_IN[3] < 3 AND A_IN[3] > 1 AND OMANUAL_MODE = ON THEN ' 通道Z 模拟量触发 手动模式断使能
IR[97]=3
END IF
IF A_IN[1] > -3 AND A_IN[1] < -1 OR A_IN[1] < 3 AND A_IN[1] > 1 AND OAUTO_MODE = ON THEN' 通道X 模拟量触发 自动模式断使能
IR[97]=1
END IF
IF A_IN[2] > -3 AND A_IN[2] < -1 OR A_IN[2] < 3 AND A_IN[2] > 1 AND OAUTO_MODE = ON THEN' 通道Y 模拟量触发 自动模式断使能
IR[97]=2
END IF
IF A_IN[3] > -3 AND A_IN[3] < -1 OR A_IN[3] < 3 AND A_IN[3] > 1 AND OAUTO_MODE = ON THEN' 通道Z 模拟量触发 自动模式断使能
IR[97]=3
END IF
IF A_IN[1] > -3 AND A_IN[1] < -1 OR A_IN[1] < 3 AND A_IN[1] > 1 AND OEXT_MODE = ON THEN' 通道X 模拟量触发 外部模式断使能
IR[97]=1
END IF
IF A_IN[2] > -3 AND A_IN[2] < -1 OR A_IN[2] < 3 AND A_IN[2] > 1 AND OEXT_MODE = ON THEN' 通道Y 模拟量触发 外部模式断使能
IR[97]=2
END IF
IF A_IN[3] > -3 AND A_IN[3] < -1 OR A_IN[3] < 3 AND A_IN[3] > 1 AND OEXT_MODE = ON THEN' 通道Z 模拟量触发 外部模式断使能
IR[97]=3
END IF
END IF
IF IR[97]<4 AND IR[97]>0 THEN '模拟量触发断使能
ROBOT.EN=0
IR[97]=0
IR[96]=1
END IF
IF ROBOT.EN=ON '恢复使能移动再次误操作造成撞击电压V>3 or V<-3
IF A_IN[1] < -3 OR A_IN[1] > 3 AND OMANUAL_MODE=ON THEN ' 通道X 模拟量触发 手动模式断使能
IR[97]=1
END IF
IF A_IN[2] < -3 OR A_IN[2] > 3 AND OMANUAL_MODE=ON THEN ' 通道Y 模拟量触发 手动模式断使能
(1)桩体参数:当为单重管桩时,其桩径为600mm;当为双重管桩时,其桩径为800mm;对于桩长,以到达透水层下3m作为基准控制。
IR[97]=2
END IF
IF A_IN[3] < -3 OR A_IN[3] > 3 AND OMANUAL_MODE=ON THEN ' 通道Z 模拟量触发 手动模式断使能
IR[97]=3
END IF
IF A_IN[1] <-3 OR A_IN[1] > 3 AND OAUTO_MODE=ON THEN ' 通道X 模拟量触发 自动模式断使能
IR[97]=1
END IF
IF A_IN[2] <-3 OR A_IN[2] > 3 AND OAUTO_MODE=ON THEN ' 通道Y 模拟量触发 自动模式断使能
IR[97]=2
END IF
IF A_IN[3]<-3 OR A_IN[3]>3 AND OAUTO_MODE=ON THEN ' 通道Z 模拟量触发 自动模式断使能
IR[97]=3
END IF
IF A_IN[1]<-3 OR A_IN[1]>3 AND OEXT_MODE=ON THEN ' 通道X 模拟量触发 外部模式断使能
IR[97]=1
END IF
IF A_IN[2]<-3 OR A_IN[2]>3 AND OEXT_MODE=ON THEN ' 通道Y 模拟量触发 外部模式使能
IR[97]=2
END IF
IF A_IN[3]<-3 OR A_IN[3]>3 AND OEXT_MODE=ON THEN ' 通道Z 模拟量触发 外部模式断使能
IR[97]=3
END IF
END IF
IF IR[97]<4 AND IR[97]>0 THEN '模拟量触发断使能
ROBOT.EN=0
SLEEP 500
IR[97]=0
IR[96]=1
END IF
IF A_IN[1]>-1 AND A_IN[1]<1 THEN ' 通道X
模拟量触发恢复
IR[96]=0
END IF
IF A_IN[2]>-1 AND A_IN[2]<1 THEN ' 通道Y
模拟量触发恢复
IR[96]=0
END IF
IF A_IN[3]>-1 AND A_IN[3]<1 THEN ' 通道Z
模拟量触发恢复
IR[96]=0
END IF
4 结语
基于现有实践教学实训平台,力控传感器很好地解决了学生实践过程中因操作失误和程序错误导致的碰撞问题。在工业机器人上的应用不局限于简单的碰撞识别,可扩展至产品装配、力控打磨等多种复杂的应用环境,后期可根据使用情况拓展教学内容,提升设备使用率。安装传感器效果如图6所示。

图6 传感器安装图
猜你喜欢
作文·初中版(2020年9期)2020-10-12
科学与财富(2017年24期)2017-09-06
中国管理信息化(2017年9期)2017-07-13
中学生数理化·中考版(2016年10期)2016-12-22
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
物理教学探讨(2009年12期)2009-06-02
网友世界(2009年4期)2009-03-02
电子世界(2004年4期)2004-07-26
