探讨公路桥梁项目底部裂缝智能检测系统
2022-09-18 06:43洪贵林
交通科技与管理 2022年18期
洪贵林
(贵州黔程弘景工程咨询有限责任公司,贵州 贵阳 550001)
0 引言
随着使用时间的增加,公路桥梁难免出现各种病害,据统计公路桥梁中高达76%的损坏是由裂缝造成的。目前针对公路桥梁地面裂缝的检测方法主要是人工检测,该检测方法成本高、效率低、检测结果误差大,无法有效保障桥梁使用安全[1-3]。桥梁检测系统是一种新型的桥梁检测工具,但现阶段应用较多的是载人检测车,其运行成本高、检测人员安全风险大,检测结果易受检测人员主观影响。因此,新型智能桥梁检测车的研究意义重大。无人驾驶的智能化桥梁检测车辆配备轻巧灵活机械悬臂结构,其工作成本低于常规检测设备。更符合实际应用需求,具有更好的社会经济效益。
1 桥梁检测车的发展及存在的问题
现有公路桥梁检测车种类丰富,但均有不足之处。首先,现有检测车轮无法实现无人驾驶,检测时需检测人员随车达到检测现场,为保证人员安全及活动空间,车辆悬臂结构强度及截面需满足较高要求,导致桁架结构复杂笨重。制造检测车辆时需配备安保装置,生产成本大大提升。目前国内检测车机械臂长度在0~16 m之间,臂架多为1~2节,随着超宽公路桥梁项目的出现,常规检测车辆机械悬臂长度无法适应新的检测需求。其次,如跨河公路桥梁地面贴近水面,检测车机械臂无法到达桥梁底,检测人员属于高空作业,安全风险较大[4]。最后,传统的载人检测车辆需要依靠检测人员目测公路桥梁底面以判断是否出现裂缝,如检测人员疏忽大意或专业水平不过关很容易出现判断失误,导致检测结果与实际情况偏差很大。因此,考虑到常规载人桥梁检测车的诸多缺陷,国内外业界及学术界都在持续研究新型智能无人驾驶桥梁检测车的设计与制造。
2 智能桥梁检测系统
该次研究的是一种用于公路桥梁裂缝检测的智能化桥梁检测系统,该智能检测系统示意图见图1。基于检测车及机械臂,系统利用超高分辨率摄像机拍摄公路桥梁底面照片,再通过计算机处理后组合成完整的桥梁地面图像,即在相关计算机软件工具的帮助下检测人员可以通过浏览方式拼接公路桥梁底面图片,根据图片确认公路桥梁底面是否存在裂缝,分析裂缝的发展情况[5]。

图1 智能检测系统
2.1 智能检测车
为高效控制检测车,该车辆采用轮式驱动,配有四个液压驱动轮以及制动装置,确保车辆能安全灵活移动。车轮的方向通过电动汽缸控制,全部车轮都同向转动可使检测车横向平移。由于公路桥梁空间较小无法用护栏实现检测车辆双向制动,可在检测车侧向位置设置辅助轮,增加车轮与桥面的接触面,实现更加灵活高效的制动。
检测车驾驶舱位于车后端,表面采用的聚碳酸酯玻璃面板,厚8 mm,可有效抵御冲击,同时尽量减轻自重,满足工作强度要求。机械臂静止或展开时检测车可维持平衡,当机械臂位于桥护栏上时,需前伸适当长度的悬臂才能使检测车身保持平衡[6]。
2.2 机械手臂系统
机械手臂的主要设计难点在于如何确保臂的灵活伸展,运输阶段的检测车如图2所示。通过分析公路桥梁空间及结构可知:机械手臂多数时间以较低速度展开,可忽略其动态研究,重点进行静态研究,以有效保证位于桥梁护栏上方时机械臂不因伸展而导致检测车侧翻,机械臂伸展顺序如图3所示。
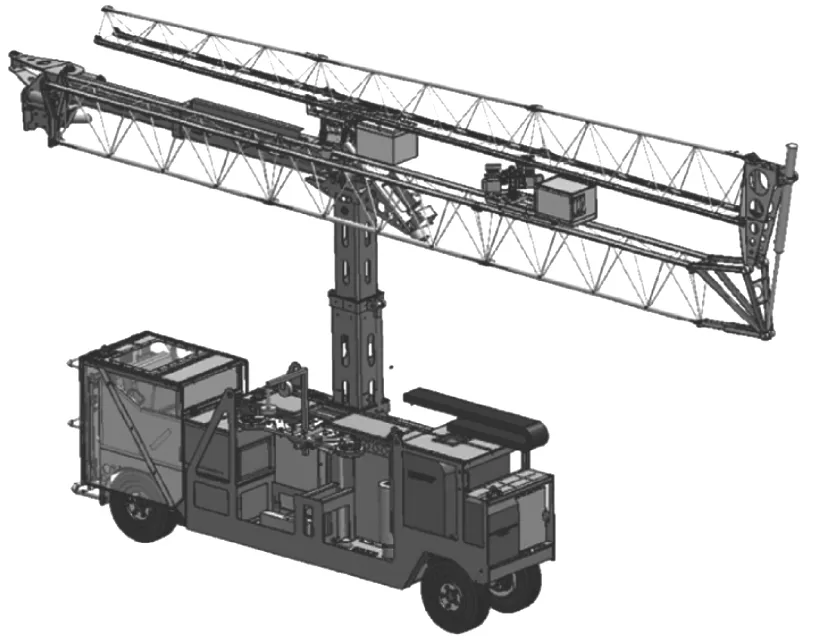
图2 运输阶段的检测车
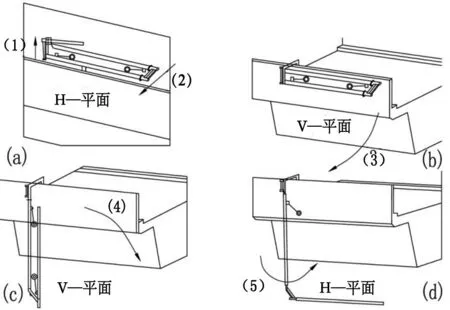
图3 机械手臂展开顺序
(1)首先机械臂从可伸展的竖直梁升起至图3(a)标注的位置。
(2)通过竖直梁、前臂连杆之间的双旋转关节实现机械臂的水平横移,使机械臂越过桥梁护栏至图3(b)标注的位置。
(3)机械臂以垂直于V-平面的水平轴为中心旋转实现机械臂垂直,即如图3(b)所示的V-平面中移动直至图3(c)标注的位置。
(4)在机械臂垂直面上顺桥梁方向展开机两臂连接之间的旋转轴,使第二节机械臂水平,具体见图3(d)。
(5)转动机械连杆使第二节机械臂连接杆处于垂直于后纵轴的桥梁底部位置。
(6)不同桥梁的尺寸、形状不同,机械臂连杆主要由长度为1 m、2 m的构件构成,可手动绑扎机械臂连杆,基于公路桥梁直径确定机械臂长度[7]。
(7)两辆拍照小车作垂直运动,获取桥梁边缘及底部照片,如图4所示。小车以晶格结构作为引导机构,通过齿轮驱动,利用伺服系统控制摄像机的拍照动作。

图4 机械臂上的移动小车
2.3 图像采集及分析处理系统
在计算机图像采集及处理技术中,图像拼接方法应用广泛,可将摄像机获取的多个照片拼成完整的单视点复合图像,直观逼真地呈现广角图像甚至全景图像。目前主流图像对齐与拼接算法主要包括直拼算法、特征算法。其中直拼算法的主要优点是只处理有价值的图像信息,可有效提高图像对齐精度,获得高精度图像;特征算法的图像拼接更快更准,图像处理效率更高,可自动检测图像的叠加关系。但对于纹理差的图像运用特征算法很容易造成图像对齐及拼接效果变差甚至失败。因此,该研究提出效率更高、结果更加可靠的图像处理算法,该算法基于上述特征拼接算法,合理运用桥梁结构线型特征。通过试验验证该算法适合用于检测公路桥梁底部裂缝。
匀速移动机械臂上的摄像小车,利用高分辨率CCD摄像机拍摄桥梁底部高清照片:
(1)检测车辆移动到既定移动路线的起点,通过机械臂将智能检测车移至桥梁底部既定位置。
(2)机械臂匀速移到移动路径终点,移动过程中CCD摄像机获取二维图像、三维点云以及相关姿态数据[8]。
(3)智能检测车、机械臂配合完成下一条运动路径,再用第二条路径的数据将机械臂回归到路径起始点。
(4)智能检测系统可循环执行上述步骤,合理移位实时获得图像数据,最终覆盖整个桥梁底部,短时间内快速收集大量的桥梁底部图像数据。图5为数据采集系统。

图5 数据采集系统
基于摄像机获取的一组桥梁图像运用图像算法拼接成完整清晰的桥梁底部图像,开始拼接前须分类图像,再组合成完整的桥梁结构全景图,方便检测人员通过目测或自动化检测技术检测桥梁底部的裂缝,评估其健康状况。作为衡量公路桥梁结构健康状况的关键因素,桥梁裂缝的检测至关重要,因此必须通过算法将桥梁底部图片对齐拼接成裂纹检测全景图[9]。运用图像分析系统分析全景图特征,找到桥梁底部裂缝,以确保检测结果精准可靠,进而构建完整准确的公路桥梁结构健康状态数据库,方便检测人员进行桥梁结构健康状态评估,有效提升公路桥梁健康状态评价和维护效率。
3 智能桥梁检测车系统的发展前景
长期以来,目视检查是检测桥梁结构健康状况的主要方法,通过人的视觉检查桥梁结构存在较大的主观性及不确定性,检测结果可靠性不高。而且部分公路桥梁的底部结构比较复杂,目视检测难度较大,很容易导致误判。因此,借助高清工业CCD摄像机以及灵活移动平台可以实时大范围采集桥底部图像,对其结构健康状况进行检测,具有方便、高效、安全等优点。该文探讨的智能化桥梁检测系统可作为桥梁检测人员的有效辅助工具,通过设置在机械臂末端的智能检测工具采集桥梁底部图像,再运用相应的图像对齐拼接技术自动识别裂缝,根据系统识别结果快速准确地评估桥梁健康状况[10]。
结合桥梁检测实际需求可改进智能检测系统:
(1)结合图像点特征、桥梁结构线型特征,优化图像姿态非常关键,但图像点特征、桥梁结构线型特征的权重也至关重要,需采用更加高效稳定的技术手段并尽量降低操作成本。
(2)当前应用的单调模型无法完全满足检测需要,需采取仿真模型、桥梁结构线特性分析等方法提高图像分析效率。
(3)需找到更加高效的方法消除亮度差、色差,重点分析处理全景图之间的叠加区域,避免分析整个图像,以节省计算机资源,提高图像处理效率,同时更好地控制图像拼接线。
4 结论
综上所述,随着我国社会经济的持续发展、城市化建设进程不断加快,各种跨河流公路桥面项目数量快速增加,对国民经济的发展起到了非常重要的促进作用。随着使用时间的增加,很多公路桥梁结构安全性、持久性不容忽视。作为常见的桥梁结构病害,裂缝对公路桥梁结构的耐久性、安全性产生严重威胁。因此,该文重点针对公路桥梁结构裂缝智能化检测进行研究,将裂缝作为评价桥梁健康状况的主要指标,提出一种适用于道路桥梁裂缝检测的智能化检测系统,针对该系统的主要结构及发展应用提出具有建设性、创新性的理念和想法,以促进桥梁裂缝智能化检测技术的发展,更好地保障公路桥梁的使用安全。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
大众标准化(2022年10期)2022-02-06
铁道建筑(2020年8期)2020-09-04
当代工人(2020年8期)2020-05-25
湖南教育·A版(2019年4期)2019-05-10
小学生学习指导(低年级)(2019年4期)2019-04-22
减速顶与调速技术(2018年1期)2018-11-13
小溪流(画刊)(2017年12期)2018-01-10
山东工业技术(2016年15期)2016-12-01
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25