
小波神经网络PID控制在板球系统中的研究
2022-09-19 01:08夏国锋向凤红杨立炜
电光与控制 2022年9期
夏国锋, 向凤红, 杨立炜
(昆明理工大学信息工程与自动化学院,昆明 650000)
0 引言
板球系统是一个具有非线性、强耦合、参数不确定性和未知干涉的二维控制对象[1],几乎包含了复杂系统的所有特征,是控制理论研究的理想实验平台,优化其控制算法可有效提高轨迹跟踪的控制精度。经典的板球控制算法都是基于PID进行研究和改进的,针对PID控制器参数的整定问题,常用的算法有临界比例度法、模糊整定法、神经网络PID等。
为解决常规PID参数整定的不足之处,相关学者做了以下改进:文献[2]提出了模糊PID控制器,虽然板球的动静性能有所改善,但响应速度慢和超调较大;文献[3]提出Backstepping方法和H∞控制理论控制板球,跟踪误差较大;文献[4]为解决RBF-PID算法响应速度慢而引入加速率,但是系统跟踪精度较差;文献[5]设计嵌入式自适应PID系统,虽然能够自整定参数,但是小球在平板边缘处滑出平板;文献[6]为解决非线性系统不确定性和复杂性,将小波神经网络(WNN)辨识与PID控制器相结合,获得了很好的辨识性能;文献[7]为了抑制次同步共振(SSR),利用WNN自整定PID,获得了很好的鲁棒性;文献[8]针对电机伺服系统非线性和不确定性,提出WNN控制器,获得了良好的频率响应和跟踪精度。
以上常规PID改进策略存在控制响应慢、稳定性差和鲁棒性差的问题,本文结合小波神经网络收敛快、稳定性和鲁棒性好等优点,首次提出了一种基于板球系统的WNN辨识和WNN-PID控制相结合的策略,该策略结合小波理论和BP神经网络,基于动量梯度和AdaDec动态学习速率,更新权值参数寻最优的PID参数,实现了PID参数的自整定。
1 板球系统建模
由于板球系统存在复杂非线性[1],为此,假设具有以下约束条件:1) 不考虑所有摩擦力的影响;2) 球与板之间没有滑动和跳动(任何时刻小球r=ωR,r为小球速度,ω为球板角速度,R为球板中心到小球的距离(即小球半径),满足系统可积条件); 3) 任何情况下球与板都接触;4) 球绕Z轴及其平行轴的旋转忽略不计; 5) 平板质量分布均匀对称,板在X和Y方向关于中心点对称,两个轴机械条件相同。
板球系统二维结构如图1所示。
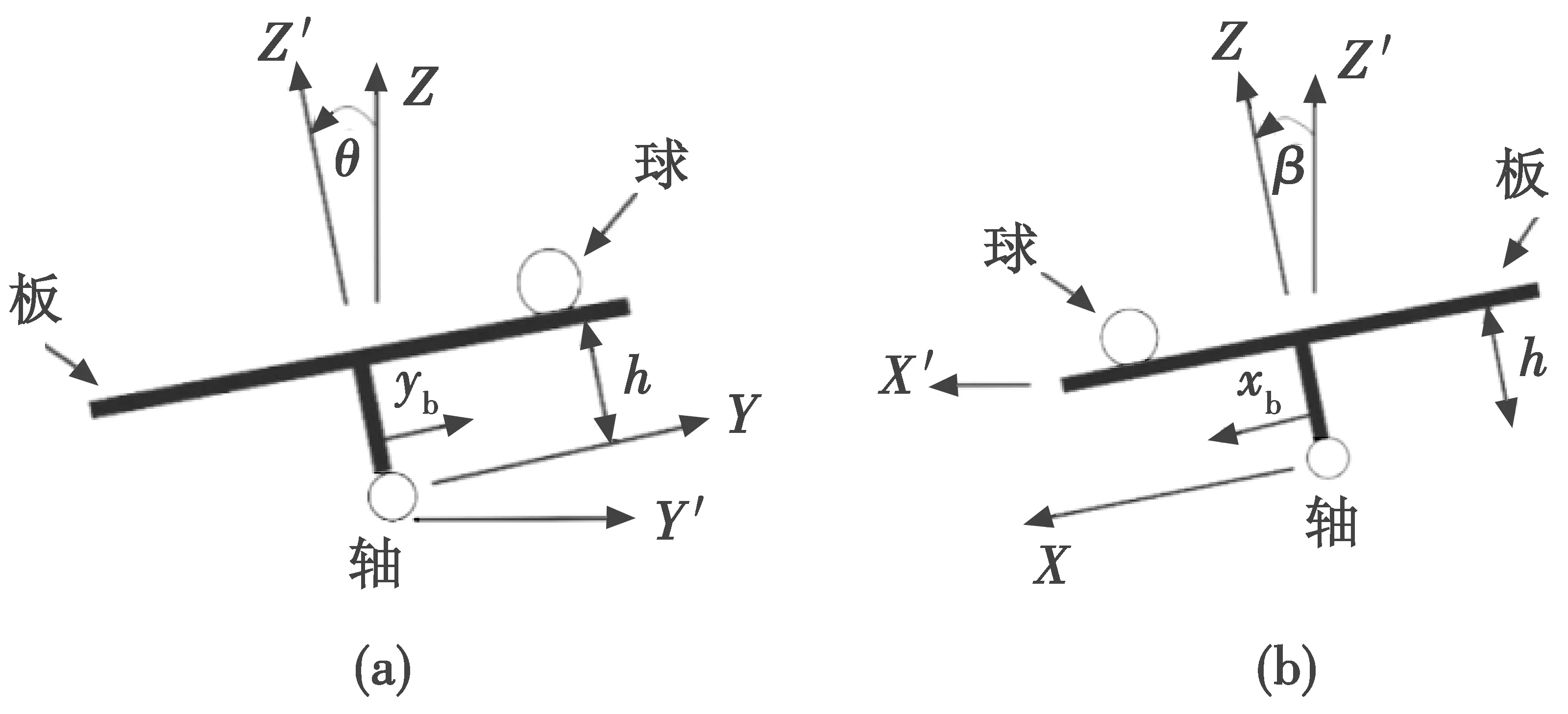
图1 板球系统二维结构Fig.1 Two-dimensional structure of ball and plate system
板球系统基于能量的拉格朗日方程[9]推导,即
(1)
式中:T是拉格朗日参数;q=(qX,qY,qθ,qβ)T,代表4个自由度方向的坐标;V为势能;L为耗散函数;u(t)为作用于系统的外力向量。根据欧拉—拉格朗日方程,可分别推导出X和Y方向、θ和β方向的平衡方程为

(2)

从式(2)可以求得板球的状态方程为
(3)

(4)
一般情况下,小球运动速度很低,θ,β很小[1,10-11],不超过6°[2,12]可做近似处理,sinθ≈θ,sinβ≈β[13],将系统分解成X方向和Y方向2个解耦后的子系统,其模型可分别表示为
(5)
由Ib=0.4mR2,整理可得
(6)
经分析,通过拉格朗日方程建立了由两部分组成的板球系统模型,可得X方向和Y方向的独立系统。
2 WNN-PID控制器的设计
设计的WNN-PID控制器系统结构如图2所示。其中,rin表示输入,yout表示输出。
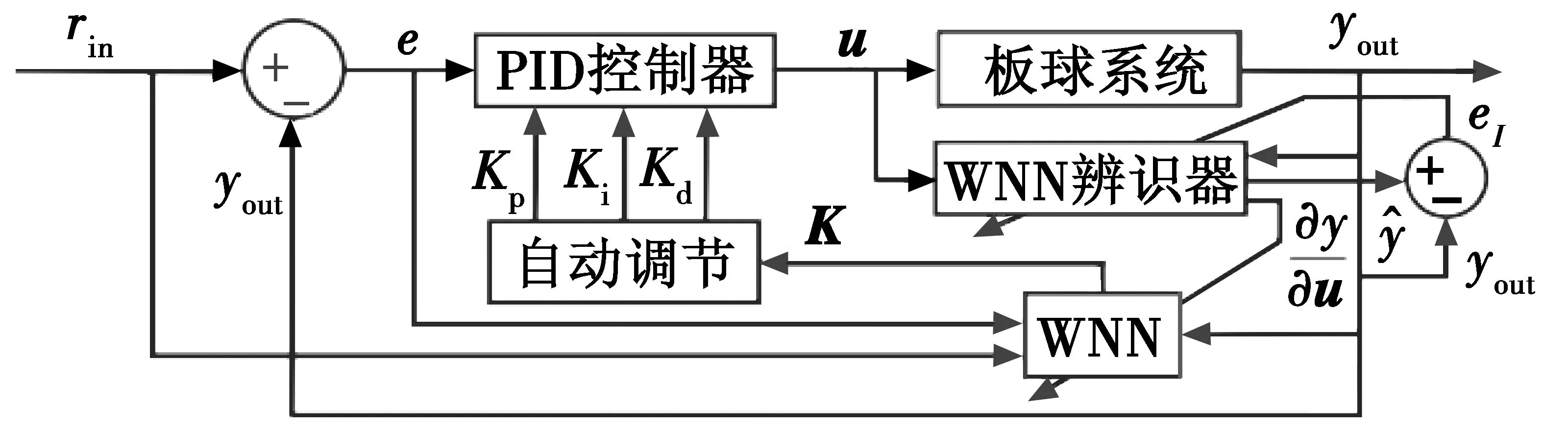
图2 WNN控制方案的总体控制框图Fig.2 Overall control block diagram of WNN control scheme
其中被控对象由PID直接对其控制,控制器的3个参数Kp,Ki,Kd由WNN整定,WNN辨识器对系统辨识,调整WNN的参数。
2.1 小波神经网络
本文所设计的WNN-PID控制器采用3层结构,各层节点数为3-5-3,结构如图3所示,其中,m为输入层节点数,p为隐含层节点数,n为输出层节点数。

图3 小波神经网络的结构Fig.3 Structure of wavelet neural network
隐含层的输入为
(7)
隐含层输出为
(8)
选择小波基函数为
h(x)=cos(1.75x)e-x2/2
(9)
输出层激励函数
(10)
输出层输入算式为
(11)
则可得网络的输出为
(12)
式中:K=[KpKiKd]T;xi=[rin(k)yout(k)e(k)]T;yn(k)=rin(k),为小球目标位置;y(k)=yout(k),为小球位置;e(k)为误差;φl j为输出层的第l个神经元与隐含层第j个神经元的连接权值;ωi j为隐含层的第j个神经元与输入层第i个神经元的连接权值;θj为隐含层第j个神经元的阈值;βl为输出层第l个神经元的阈值。
为了推导WNN的权值更新规律,利用核最小均方(Kernel Least Mean Square,KLMS)算法定义WNN的误差函数指标E(k)[14]为
E(k)=0.5(yn(k)-y(k))2。
(13)
应用动量梯度下降法,得到权值的更新规律为

(14)
式中:η为学习速率,0<η<1;α为动量,0<α<1;
(15)

(16)

(17)
(18)
(19)

通过WNN与PID控制器相结合,实现对模型的跟踪控制。增量式PID控制规律为
Δu(k)=(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2)。
(20)
2.2 WNN辨识学习算法
WNN辨识部分采用2-5-1结构,如图4所示。
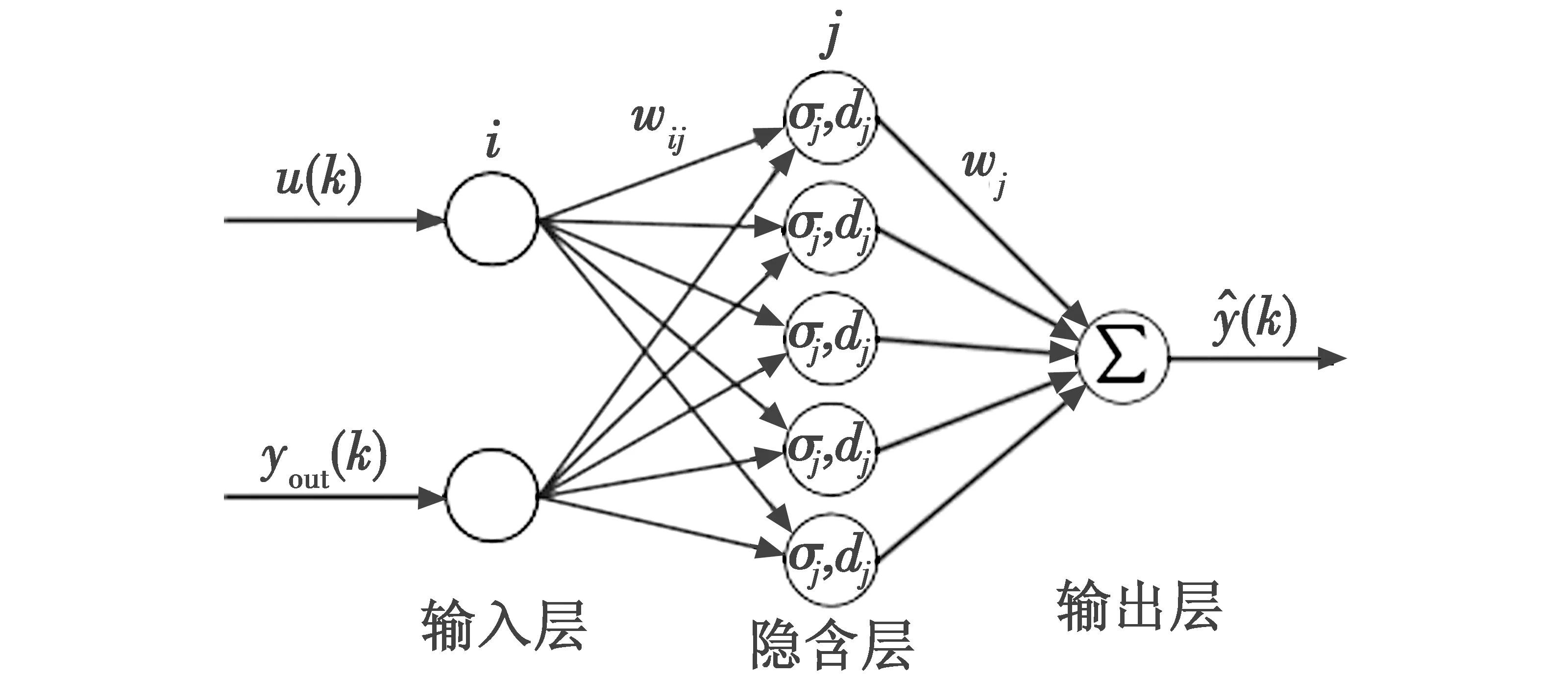
图4 三层WNN辨识结构Fig.4 Three-layer WNN identification structure
辨识部分的小波函数和WNN-PID所用一样,其正向传播算法如下所述。
隐含层输入输出
(21)
(22)
输出层输出
(23)
其中,xi=[u(k)y(k)]T。
定义误差指标函数为
(24)
其反向传播权值调整算法为
(25)
式中:0<ηI<1,0<αI<1;
(26)
(27)
算法稳定性分析如下。
取Lyapunov函数为
(28)
则

(29)
另外,令P=[wi jwjσjdj],则
(30)
所以
(31)
2.3 AdaDec动态学习速率
神经网络的学习速率要求,刚开始初始学习速率η(0)较大;随着学习次数的增加,η(k)逐渐减小直到网络更新到最优解。指数衰减学习公式为
η(k)=η(0)(10)-k/r0。
(32)
AdaDec[15]是基于AdaGrad的改进形式,原理如下
p(k)=η(0)(1+k/r0)-s
(33)
G(k)=γf2(k-1)+f2(k)
(34)
(35)
其中:r0为常数;p(k)为初始学习速率;G(k)为中间变量;s为无关常数,通常取1或0.75;c=1,以确保学习速率有界;f(k)=∂E(k)/∂w(k),代表误差函数对权值的导数;γ为调整量。
3 系统收敛性分析
根据系统性能指标E(k),在反向传播方向上调整隐含层和输出层的权重系数。构造Lyapunov函数
V(k)=0.5(yn(k)-y(k))2=0.5e2(k)
(36)
通过梯度下降法进而可得
(37)

(38)
假设式(38)满足以下条件:1) 0<η(k)<2;2)V(k)趋于V*;(3)g(0)=0。那么
(39)
如果z(k)是有界的,那么
(40)
定义V*=[v1v2v3]T=[KpKiKd]T,结合式(22)有
(41)

(42)

(43)
因此,可得


(44)
结合条件1)、式(39)和式(40)可知,ΔV(k)≤0,因此系统是稳定的。
4 仿真分析
为了验证WNN-PID控制方案的可行性和有效性,本文引用文献[16]中采用BP神经网络辨识和BP神经网络整定PID参数相结合(BP-PID)策略作为对比,分别对常规PID,BP-PID和所提策略进行了仿真实验。
选取c=1,η(0)=0.2,s=1,γ=0.9,r0=6.6×108,α=0.01;ωi j,φl j,wj,wi j在[-1,1]随机初始化,aj,bj,σj,dj在[0,1]随机初始化。对单位阶跃、正弦信号和圆形轨迹分别进行跟踪仿真。
图5所示为单位阶跃响应曲线。


图5 单位阶跃响应曲线Fig.5 Unit step response curve
由图5 (a)可以看出,常规PID算法存在超调大、调节难、响应慢的问题,相比于此,在超调和响应速度指标上,BP-PID策略更优;相比于BP-PID算法,本文所提策略几乎没有超调,且稳定性好,能快速跟踪给定指令信号(Demand)。通过对比图5(a)和图5(b),在响应速度和稳定性方面,以动态学习速率训练神经网络的算法都优于固定学习速率,进一步可以看出所提策略具有更好的收敛性和鲁棒性。
图6所示为正弦跟踪及误差曲线。

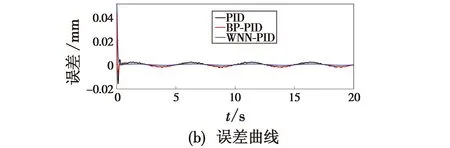
图6 正弦跟踪曲线和误差曲线Fig.6 Sinusoidal tracking curve and error curve
如图6所示,在两种PID控制器自整定的仿真结果中,输出均能够跟踪输入的变化。相较于此,常规PID和BP-PID在稳定性和误差上都不如WNN-PID控制策略。
图7所示为WNN-PID正弦跟踪误差对比曲线。

图7 WNN-PID正弦跟踪误差对比曲线Fig.7 Error comparison curve of WNN-PID sinusoidal tracking
由图7可知,固定学习速率由于η固定,不能及时根据性能指标函数调整大小,容易陷入局部最优,所以在稳定性上不如动态学习速率。
图8所示为WNN-PID圆形轨迹跟踪。

图8 WNN-PID圆形轨迹跟踪Fig.8 WNN-PID circular trajectory tracking
由图8的X和Y方向的圆形轨迹跟踪可发现,动态学习速率响应和鲁棒控制特性优于固定学习速率。
5 结束语
本文针对板球系统非线性、PID控制效果差等问题,首次提出了WNN-PID控制策略应用于板球系统。该策略利用WNN辨识板球系统模型,获得Jacobian信息,然后利用辨识得到的∂y(k)/∂u(k)在线训练WNN辨识和WNN控制器的参数,WNN进一步整定了PID参数。此外,为了加快网络收敛速度,引入动量梯度和AdaDec动态学习速率更新WNN的参数。同时,结合Lyapunov验证了板球控制系统的稳定性,从而保证了误差的收敛性。
经拉格朗日建模仿真实验表明,本文策略与传统PID和BP-PID相比,具有较好稳定性和鲁棒性,并且几乎没有超调。在后续研究中,可结合模型参考以及结合模糊小波神经网络,进一步研究板球系统的强耦合和未知干扰等特性。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
灌篮(2022年4期)2022-06-17
邮电设计技术(2021年2期)2021-03-13
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
计算机与数字工程(2018年5期)2018-05-29
意林(绘英语)(2018年1期)2018-04-28
计算机测量与控制(2018年3期)2018-03-27
