主被动磁悬浮飞轮被动磁轴承轴向力分析计算
2022-09-22 14:38俞建荣
机械设计与制造 2022年9期
俞建荣,崔 刚,席 军,刘 强
(北京石油化工学院精密电磁装备与先进测量技术研究所,北京 102617)
1 引言
近年来,在军民融合、商业航天、6G 通讯等需求背景的推动下,对微纳卫星提出了更小体积、更低功耗、更高可靠、更长寿命的性能指标要求[1-2]。磁悬浮飞轮采用磁悬浮轴承支承,具有无摩擦、无需润滑、高转速等优势,可通过改变转子角动量输出控制力矩,实现卫星高精度姿态控制,是微纳卫星的理想惯性执行机构[3-4]。
磁悬浮飞轮主要分为全主动和主被动两种类型[5],自1986年法国首次将磁悬浮飞轮应用于卫星以来,各国纷纷开展了磁悬浮飞轮的研制工作,我国上海航天控制技术研究所、北京航空航天大学等科研院所也相继研制了全主动磁悬浮飞轮,其中某大学研制的15Nms的全主动磁悬浮飞轮于2012年成功进行了搭载试验[6]。但全主动磁悬浮飞轮具有体积大、控制系统复杂等缺陷,不适用于微纳卫星领域。为满足小卫星姿态控制需求,英国Surrey空间研究中心于2009年设计的一种主被动磁悬浮飞轮,采用主动磁轴承实现径向两自由度平动和径向两自由度偏转控制,利用U型转子的回复力实现轴向平动,简化了飞轮控制系统[7]。但飞轮系统功耗和结构紧凑性等相较于全主动磁悬浮飞轮没有显著的降低。
基于现有的磁悬浮飞轮结构,介绍了一种适用于微纳卫星的三自由度被动和两自由度主动悬浮控制的磁悬浮主被动飞轮,阐述了其总体方案和工作原理,对支承飞轮转子的被动磁轴承建立电磁力-数学模型,并运用有限元软件进行仿真计算,分析验证了被动磁轴承可支撑飞轮转子轴向方向的稳定悬浮。
2 主被动磁悬浮飞轮结构
主被动磁悬浮飞轮结构方案(角动量500mNms,转速:5000r/min,转子质量:0.6kg),如图1 所示。其主要由主动磁轴承、被动磁轴承、电机、保护轴承、传感器和密封罩组成。其中,主动磁轴承采用纯电磁结构控制飞轮转子径向平动两自由度的稳定悬浮,控制精度高,控制系统可靠;永磁被动磁轴承实现飞轮转子轴向平动和径向偏转三自由度稳定悬浮支撑,可有效减小飞轮的轴向高度,降低飞轮的体积和重量。此外,高速电机采用空心杯无定子铁心结构,可实现飞轮的高速稳定旋转;保护轴承采用角接触球轴承,在飞轮发生故障时可实现飞轮转子的安全着陆;电涡流位移传感器可检测转子的精确位置,提供飞轮转子的矫正信号,使转子稳定悬浮;密封罩保证飞轮转子工作时的真空环境,保护飞轮组件的清洁。该结构的主被动磁悬浮飞轮与现有结构相比,降低了飞轮的轴向高度,减小了飞轮的体积和质量,结构简单可靠,控制通道数少,降低了飞轮的成本与功耗,可作为微纳卫星的理想惯性执行机构。
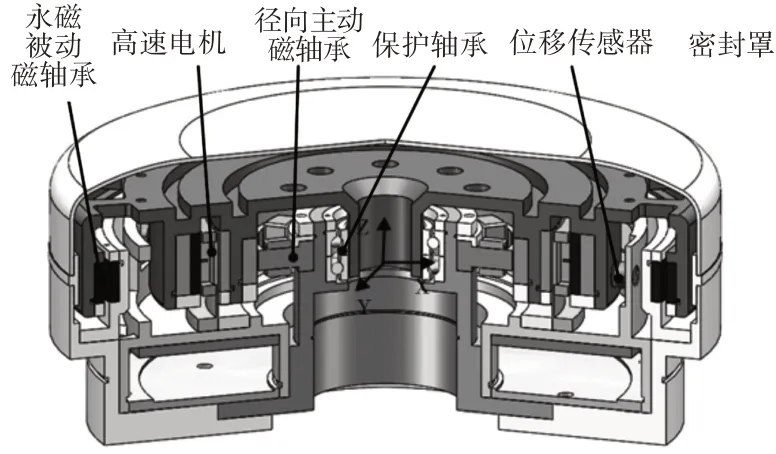
图1 主被动磁悬浮飞轮结构Fig.1 The Structure of Active-Passive Hybrid Magnetically Suspended Flywheel
3 永磁被动磁轴承
被动磁轴承主要分为斥力型径向被动磁轴承、斥力型轴向被动磁轴承、吸力型径向被动磁轴承和吸力型轴向被动磁轴承四大类[8-9]。其中斥力型径向被动和斥力型轴向被动磁轴承定转子磁环处于相互的退磁场当中,不利于飞轮的长寿命。飞轮转子的载荷会使吸力型径向被动磁轴承的轴向间隙减小,易造成转子的不稳定。吸力型轴向被动磁轴承内外双圈为径向间隙,与主动磁轴承、电机和保护轴承一致,简化了飞轮的调试和装备,因此该类型的被动磁轴承适合应用于长寿命、高可靠和低成本的卫星平台。轴承设计计算的出发点为计算验证轴向承载力的大小,目前计算磁轴承的承载力的方法主要有磁荷法、有限元法和等效磁路法。由于磁荷法精度较高且计算复杂度低,因此适合运用磁荷法计算被动磁轴承的轴向承载力。
3.1 被动轴向承载力数学模型
为了计算被动磁轴承对飞轮转子的轴向承载力,假设被动磁轴承两永磁环同心,且两者之间不发生相对扭转,内外双圈磁环磁化方向为径向,等效的正负磁荷均匀分布在磁环圆周表面,如图2所示。
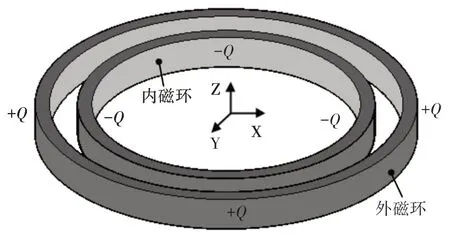
图2 被动磁轴承圆周方向磁荷分布示意图Fig.2 Schematic Diagram of Distribution of Magnetic Charge in the Circumferential Direction of Passive Magnetic Bearing
根据库仑定律,空间任意两点磁荷Qm1和Qm2之间的作用力可表示为:

式中:μ0—真空磁导率;
r—两点磁荷之间的距离矢量。
在被动磁轴承两永磁环的内外圆周方向分别取面积单元dA1、dA2、dA3、和dA4,假设各面积元到X轴的轴向距离分别为Z1、Z2、Z3和Z4,内外永磁环半径分别为r1、r2、r3和r4,四个面积元相互作用产生的永磁轴向力分别为df13、df14、df23和df24,如图3所示。
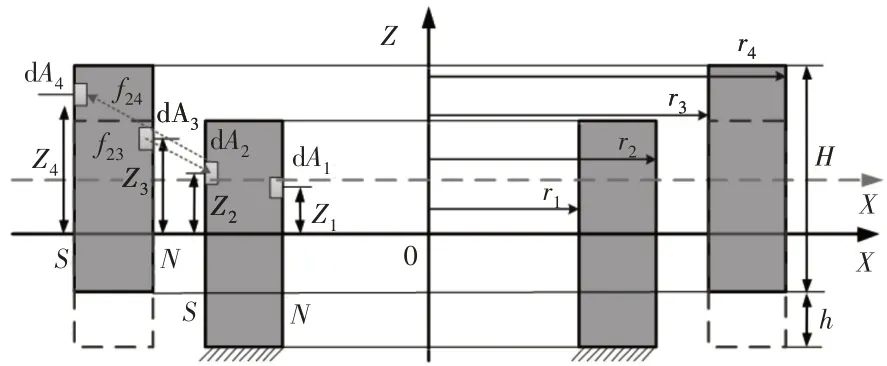
图3 被动磁轴承轴向位移示意图Fig.3 Schematic Diagram of Axial Displacement of Passive Magnetic Bearings
设磁钢的轴向长度为H,内外永磁环轴向错位距离为h,现以dA2和dA3之间的作用力为例,建立数学模型。dA2和dA3之间的轴向力可表示为:

假设磁荷面密度为σ,且均匀分布在被动磁轴承内外永磁环圆周表面,则有:

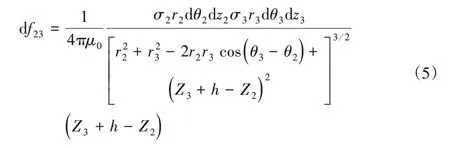
由图3和图4可知,dA2和dA3之间的磁荷距离为:
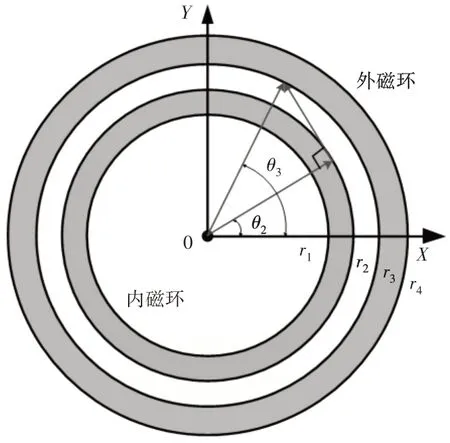
图4 被动磁轴承磁荷几何关系示意图Fig.4 Schematic Diagram of Magnetic Charge Geometry Relations of Passive Magnetic Bearings

将式(3)和式(4)带入式(2)中得到:
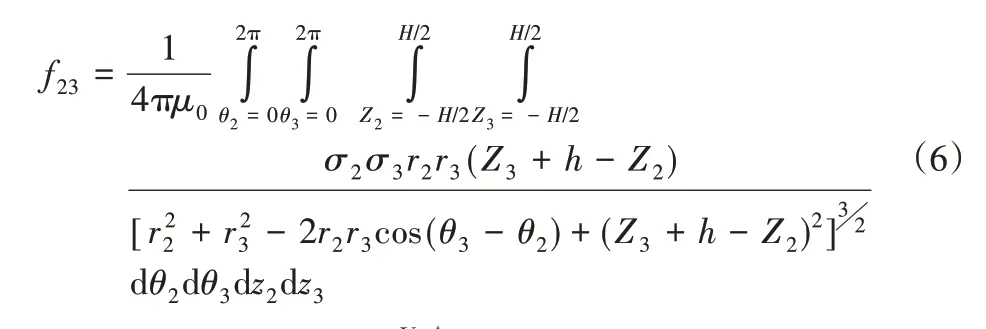
对磁荷分布面上的积分元df23进行面积分得到:
根据电磁学理论[10]:

式中:J—磁极化强度矢量;M—磁化强度,由于沿磁环圆周方向的法线方向与磁化强度方向相同,根据退磁曲线,当H=0时,可得到:

因此,f23可表示为:
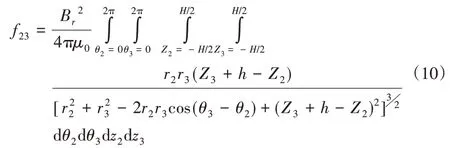
同理,可以分别求得f13、f14和f24:

其中考虑了被动磁轴承两永磁环之间的斥力和吸力问题,故上述磁力表达式均带正负,被动磁轴承总的承载力为:

主被动磁悬浮飞轮采用的径向磁化吸力型轴向被动磁轴承的计算几何电磁参数,如表1所示。积分计算结果,如图5所示。被动磁轴承两永磁环轴向错位距离在(0~±2.5)mm时,轴向力随着轴向位移的增加而增大,轴向错位距离在(±2.5~±10)mm时,轴向力随着轴向位移的增大逐渐减小,并逐渐减小为零。
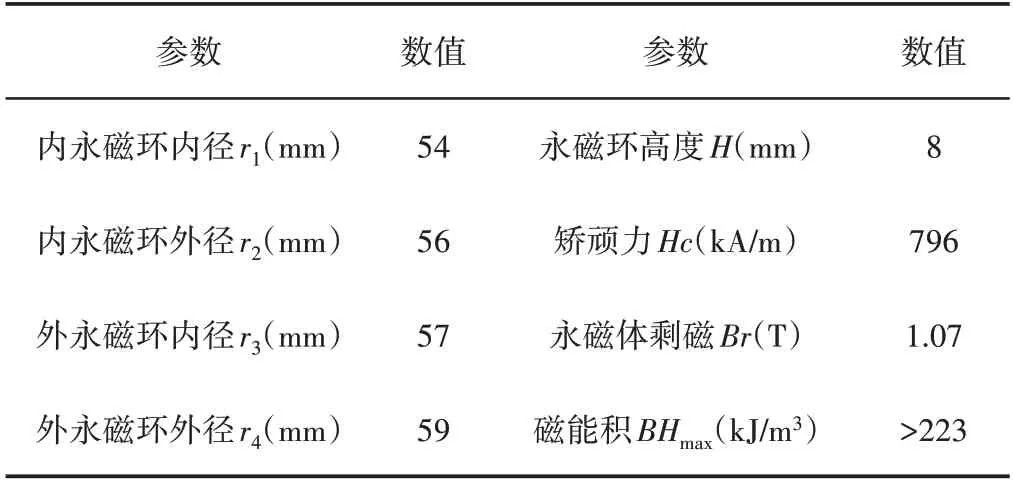
表1 被动磁轴承计算参数Tab.1 Calculation Parameters of Passive Magnetic Bearing
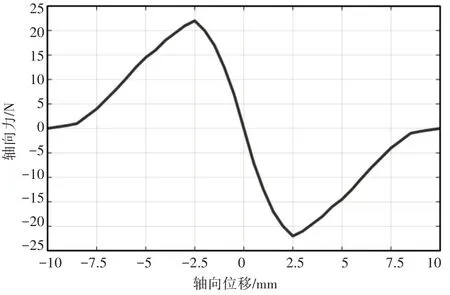
图5 被动磁轴承轴向力-位移计算结果Fig.5 Axial Force-Displacement Calculation of Passive Magnetic Bearings
3.2 有限元仿真分析
根据表1中被动磁轴承设计计算参数,利用有限元软件建立三维模型,并进行网格划分计算,其磁密仿真结果,如图6所示。从内外圈磁钢的磁密分布与磁场矢量可看出,径向磁化吸力型轴向被动磁轴承沿圆周方向有较好的磁密均匀性。当飞轮转子因外界干扰产生轴向位移时,内外圈磁钢之间均匀的相互作用力可将转子回复到平衡位置,实现轴向承载力的稳定可靠。
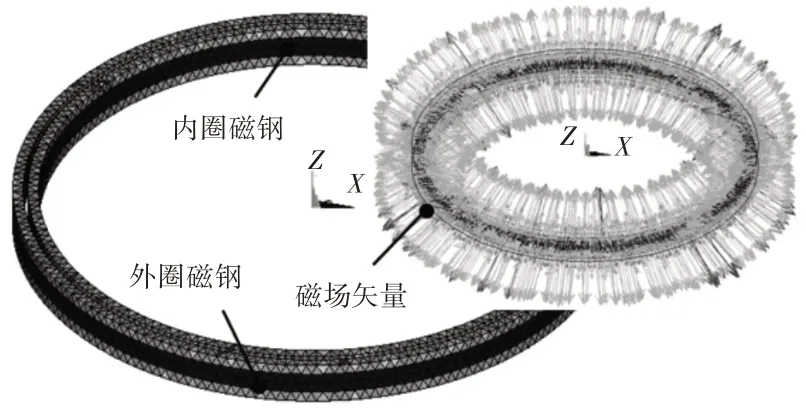
图6 被动磁轴承磁密分布图Fig.6 Distribution of Magnetic Flux Density of Passive Magnetic Bearings
内永磁环为定子,外永磁环为转子,利用有限元软件对被动磁轴承的轴向承载力与位移之间的关系进行分析计算。基于积分计算的解析结果,取轴向错位距离(-10~10)mm进行有限元仿真计算,如图7所示。
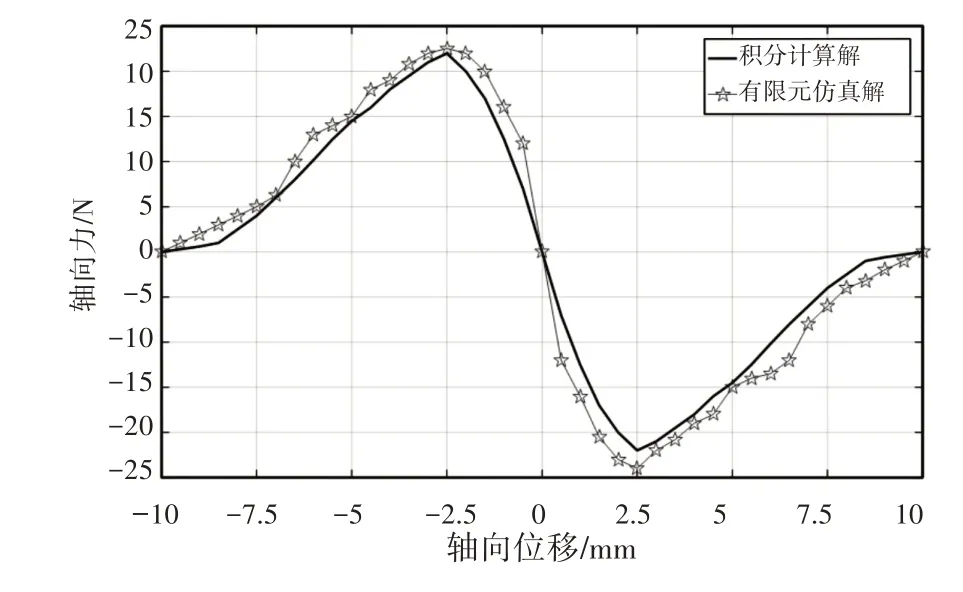
图7 ±10mm被动磁轴承轴向力-位移关系Fig.7 Axial Force-Displacement Relationship of Passive Magnetic Bearings of ±10mm
其有限元仿真计算结果与积分计算结果基本相同,轴向错位距离±2.5mm 时两永磁环的相互作用力达到最大值,超过±2.5mm时,相互作用力逐渐衰弱至零。验证了等效磁荷法积分计算的正确性。
主被动磁悬浮飞轮在结构设计时,定转子之间的轴向错位距离不会超过被动磁轴承轴向承载力最大值所对应的位移,取轴向错位距离为(0~±2.5)mm,利用等效磁荷法和限元软件进行进一步的分析计算,可得出被动磁轴承有效承载力与位移之间的关系,如图8所示。
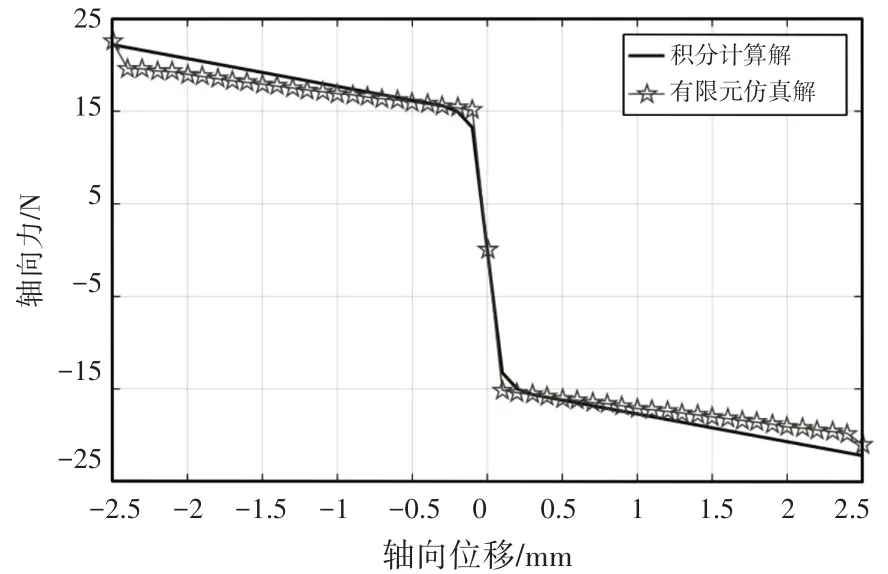
图8 ±2.5mm被动磁轴承轴向力-位移关系Fig.8 Axial Force-Displacement Relationship of Passive Magnetic Bearings of ±2.5mm
飞轮处在平衡位置时,被动磁轴承之间的轴向作用力为0,当飞轮因外界干扰产生轴向平动时,被动磁轴承两永磁体产生的轴向相互作用力可矫正飞轮转子的位置,保证飞轮转子的稳定悬浮。
4 结论
采用吸力型轴向被动磁轴承应用于主被动磁悬浮飞轮,有效减少了飞轮的控制回路,降低了飞轮的轴向高度,使飞轮具有了小体积、低重量、长寿命和高可靠的优势。利用等效磁荷理论和有限元仿真计算得出的被动磁轴承轴向力与位移之间的关系曲线表明,在转子质量不超出被动磁轴承轴向力的前提下,吸力型轴向被动磁轴承可支撑飞轮转子的稳定悬浮。且该曲线为将来被动磁轴承设计与计算提供了理论研究基础。
猜你喜欢
防爆电机(2022年3期)2022-06-17
小猕猴智力画刊(2022年4期)2022-05-23
防爆电机(2021年5期)2021-11-04
小学科学(学生版)(2021年4期)2021-07-23
上海大中型电机(2021年2期)2021-07-21
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
时代汽车(2018年12期)2018-06-18
军事文摘(2017年16期)2018-01-19
中国科技教育(2016年12期)2017-08-11