机器人离线仿真编程在动力电池制造领域的应用
2022-10-09 06:15韩健
汽车工艺师 2022年9期
韩健
蔚来 江苏南京 210058
随着低碳化趋势与油价上涨,众多汽车厂家正加速转向纯电动车制造。2022年1—4月,中国新能源汽车销售了256万辆,占全球新能源车销量的57%,由此可见,新能源市场需求正快速扩大,作为新能源电动车重要组成部分的动力电池需求也是节节攀升。
动力电池制造自动化
动力电池生产如图1所示,分为电芯生产、模组生产和PACK生产,其中模组生产设备自动化率较高,从电芯上料到模组下线,中间的生产过程基本无需人员参与,可以实现100%的自动化率,其中的关键就是使用了大量的工业机器人,从而代替人工操作,实现搬运、堆叠及贴胶等重复、繁重、精细的工作,大大减少生产线对人员的需求。
所以,工业机器人在模组的生产过程中扮演了极其重要的角色,机器人可以按照预先编制好的程序自动运行,实现工件点对点的自动搬运,如图2所示。机器人轨迹的重复精度很高,比如ABB6700机器人可以达到0.1mm的重复精度,这样的搬运精度足以保证生产线的高效和精确运行,所以,机器人运行程序的编制就显得尤其重要,直接影响到机器人是否准确的运行。
机器人编程方式
机器人编程分为两种,在线编程和离线编程。
在线编程也叫示教编程,是指操作人员通过人工手动的方式利用示教器操作机器人。使用示教器提供的用户界面,移动机器人到指定的位置并记录下这个点位,将这些点位通过移动指令连接起来就形成了轨迹程序。
离线编程是通过在电脑上使用专用的编程软件对机器人进行编程,最后再将编写的程序上传到现场的机器人中的一种编程方法。市面上主流的不同品牌机器人使用不同的离线编程软件,请见下表1。
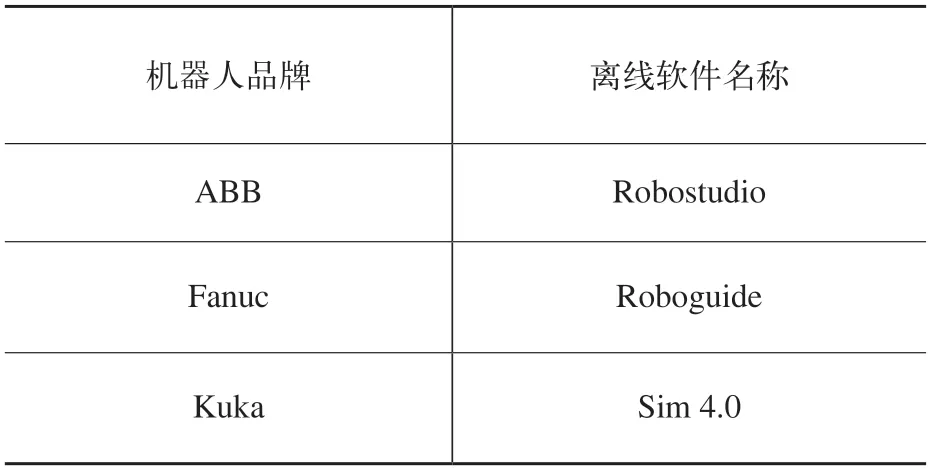
表1 常见离线编程软件
也有一些离线编程软件可以适用于不同的机器人品牌,比如西门子的PDPS软件,就可以适用市面上大多数的机器人品牌。
离线编程优势
应用离线编程,具有以下5大优势:
1)编程工作在电脑上完成,无需在现场利用实际的机器人完成编程工作,不影响现场生产。
2)在现场设备安装之前,就可以利用离线软件提前在电脑上进行编程,缩短现场机器人轨迹调试时间。
3)程序容易修改,在电脑上利用离线编程软件即可完成,方便快捷,非常直观。
4)能够在电脑上模拟实现多台机器人的联机动作,并且可从多个角度检查机器人之间是否会发生碰撞,避免真实环境中的机器人碰撞,影响生产,造成机器人及相关设备的损坏。
5)在离线编程中,可以轻松获得节拍、程序、机器人安装位置以及干涉区设置等重要数据。
由于以上优点,在当前数字工厂技术作为智能制造研究热点的前提下,离线编程技术被越来越广泛的应用。
离线编程项目实施
一个新的机器人项目,需要如下步骤来开展离线编程的项目实施。一套完整的机器人离线编程系统主要包括四个部分,如图3所示(以ABB离线编程软件Robotstudio为例)。
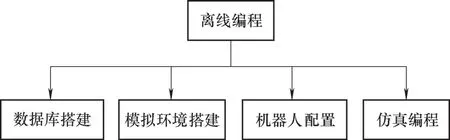
图3 机器人离线编程系统
(1)数据库搭建 建立统一的数据库是搭建离线编程系统的关键,也是关乎离线环境与实际环境一致性的关键,数据库通常包含以下3个方面的数据。
1)产品数据。产线上加工制造的产品数据。因为电池行业的机器人应用主要是搬运和堆叠,所以最重要的是产品的外形和尺寸,通常这个数据都是来源于研发部门,要确保数据是最新版本,这关乎到后期检查产品是否与其他设备发生干涉。数据格式最好是step格式,方便导入离线编程软件,如图4所示电池模组和电芯。
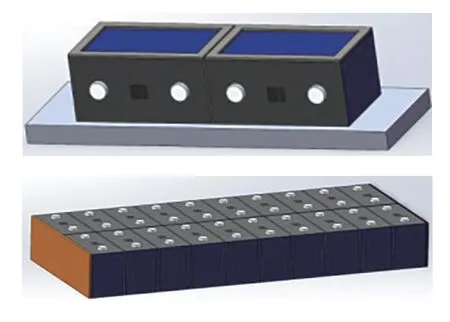
图4 电池模组及电芯
2)设备资源数据。包括工装、夹具、机器人抓手、机器人、产线以及外围附属设备。机器人,机器人数据通常都是离线软件自带,可以从离线软件中根据机器人型号选择不同的机器人。
3)工装夹具。工装和夹具数据通常是由设计方提供数据,需确保是最新版本,数据格式最好是step格式,方便导入离线编程软件,如图5所示夹爪。
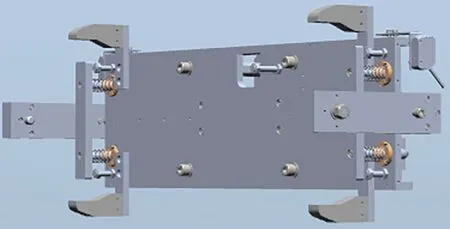
图5 工装夹具
附属设备、外围安全栏及输送链等可以从离线软件库中直接导入,如下图6所示安全栅栏和输送链。
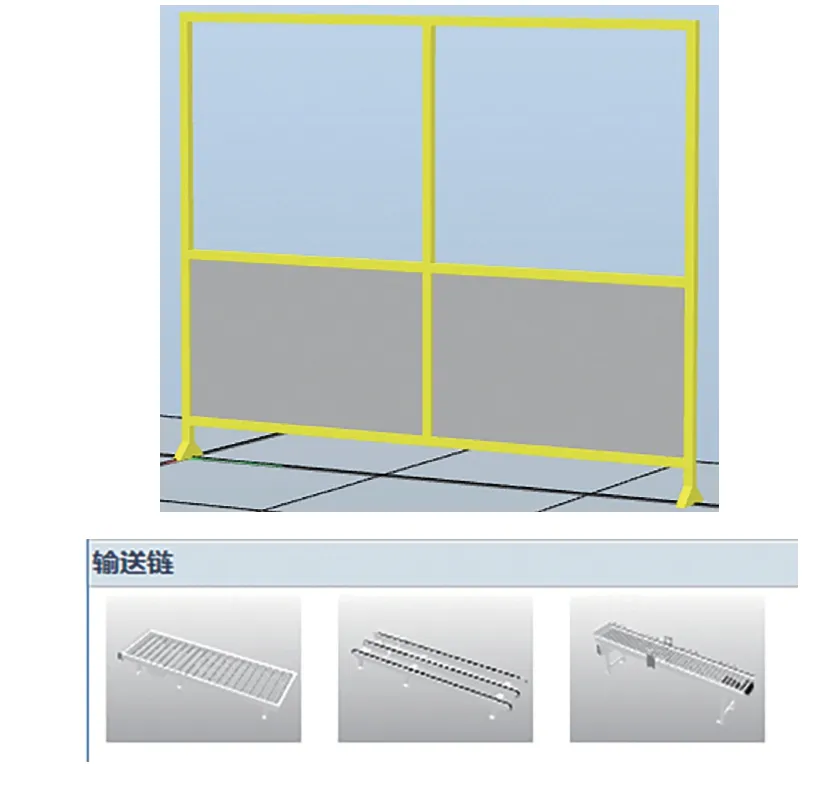
图6 安全栅栏和输送链
设备布局图,可以精准、准确地反映设备之间的相对位置,包括设备与产线附属设备之间的相对位置,这对搭建准确的仿真环境至关重要,格式最好是CAD的,可以直接测量尺寸。
(2)模拟环境搭建 根据设备布局图在离线软件中搭建和现场1∶1的模拟环境,如图7所示,包括机器人、工装、产品及安全栅等,模拟环境须准确的表达出设备之间的相对位置,这直接关系到后期编制程序的准确性。
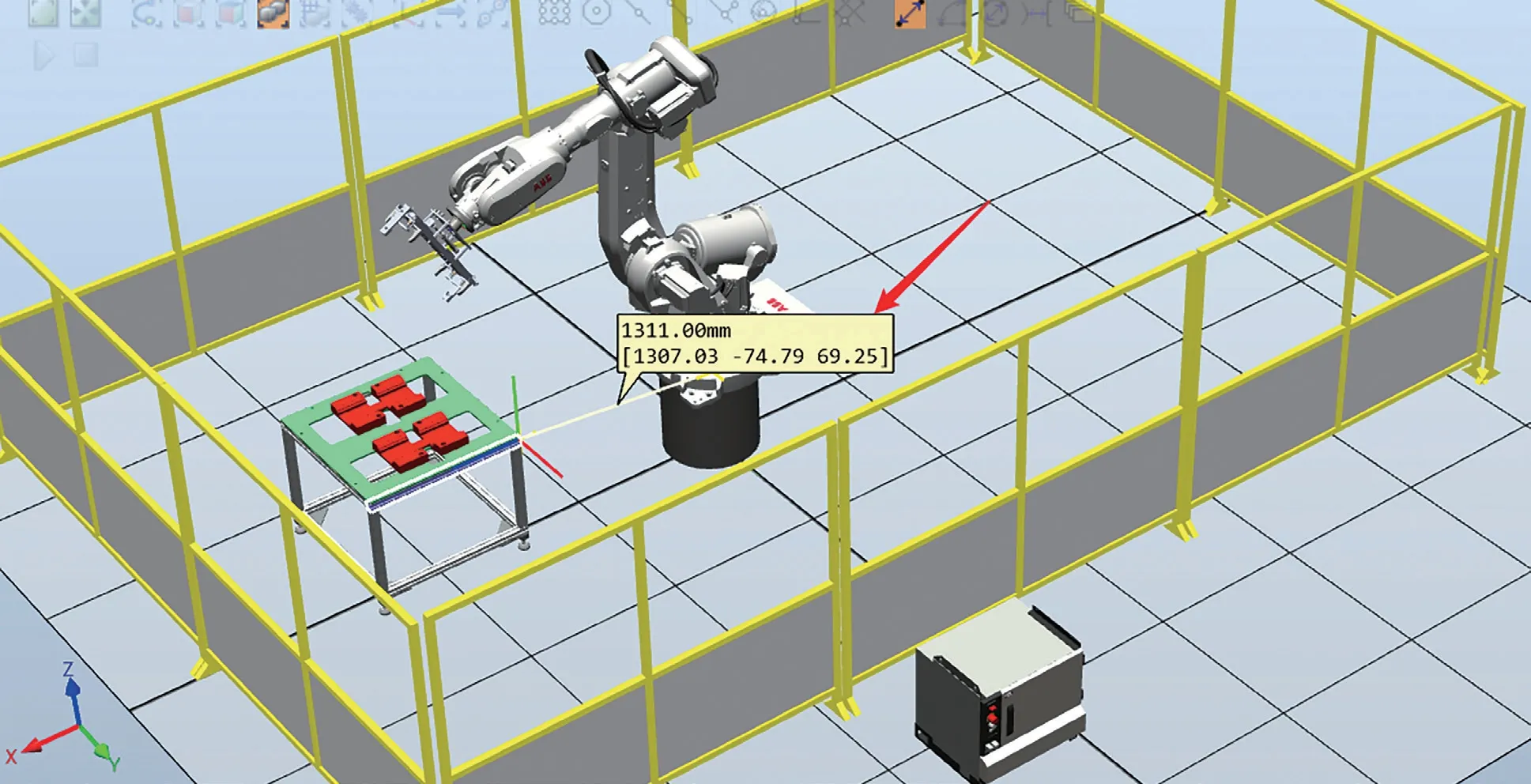
图7 模拟环境搭建
(3)机器人配置 如图8所示,在仿真环境中对机器人进行系统配置,使虚拟的机器人系统和实际的机器人系统保持一致,比如机器人型号、是否有外部轴、工件坐标系、工具坐标系及机器人安装方式等,只有系统配置准确,离线仿真出来的程序才能正确地导入现场的实际机器人,可以在这个界面配置机器人系统的各种参数。
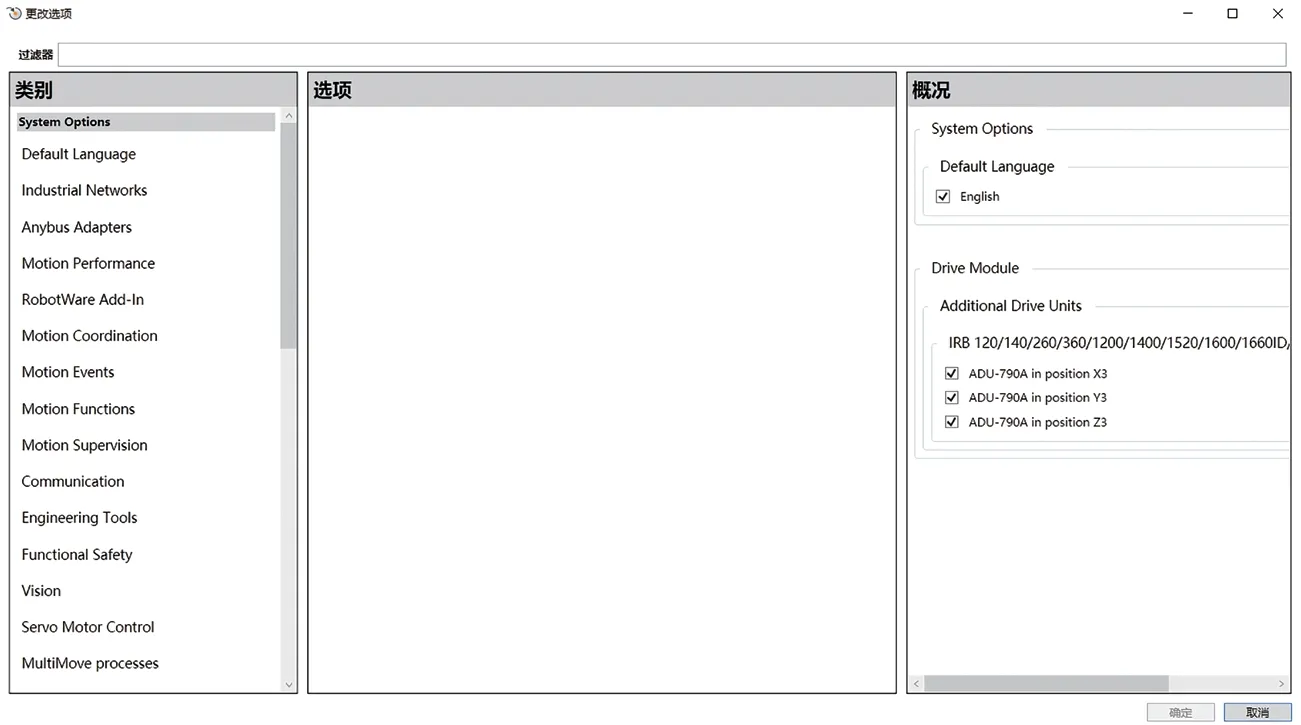
图8 机器人配置示意
(4)仿真编程 如图9所示,在模拟仿真环境中,利用仿真软件进行编程,编程逻辑要遵守事先规划好的工艺流程,要结合实际经验充分考虑以后实际过程中的应用场景,进行机器人离线模拟编程与程序输出(包含机器人原点位置程序、机器人Ready位置程序、作业程序、机器人维护位置程序、机器人干涉互锁图及节拍表等)。重点检查以下几个方面:

图9 模拟仿真环境
1)机器人与机器人、机器人与工装夹具之间的互锁信号设定。
2)节拍计算,对超出节拍的轨迹或者工序进行程序优化,从轨迹的速度、路径、与外围设备的信号交互等方面进行节拍优化。
3)注意多台机器人之间的防撞互锁信号设置,要在模拟环境中充分进行验证。
离线编程关键
1.数字工厂与实物工厂一致性
目前数字工厂数据库需要由专门的公司进行数据维护和更新,目前主要采用三维激光扫描进行实物工厂设备数据采集,并进行数据库的更新,再同步更新到离线编程的模拟环境中去,做到“所见即所得”,如图10所示。

图10 一致性示意
设备方面主要采集数据内容:生产线布局&外围安全栅及附属品;机器人&附属品;生产线夹具、基准托盘;机器人。
2.机器人离线编程与再现精度
目前机器人离线编程的精度偏差。主要取决于设备安装位置、机器离线程序和机器人夹具本体精度三方面的累积偏差。机器人安装位置偏差可以由三维激光扫描仪的数据进行补偿,精度控制在毫米级别;机器人离线通常都是由机器人厂家自己开发的离线软件完成,误差基本可忽略不计;同时节拍计算精度达到微秒级,如图11所示。

图11 节拍计时
通过三方面的精度确保,机器人离线轨迹与实际位置偏差小于3mm。极大缩短了机器人现场示教调整时间,成为新项目导入时间大大缩短的关键因素。
结语
离线编程技术不仅仅是简单在电脑上编制机器人轨迹程序,而是要构建数字化工厂的重要组成部分。从产品周期上涵盖了产品设计、工艺规划、工程计划及设备安装调试等方面。离线编程的应用可以大大缩短现场调试时间,可以验证设备布局,可以测试工位节拍,可以验证产品设计及工装夹具设计。
数字化、智能化是制造业的必经发展过程,离线编程技术也是一个不断进步和发展的过程,在这工业信息化变革的历史关口,必将扮演越来越重要的角色。中国制造要把握机会,奋勇直追,赶上这次工业4.0信息化的大浪潮。
猜你喜欢
军民两用技术与产品(2022年8期)2022-10-10
电脑知识与技术(2022年15期)2022-07-02
汽车实用技术(2022年9期)2022-05-20
电脑爱好者(2020年23期)2020-12-30
河南科技(2020年36期)2020-06-10
小资CHIC!ELEGANCE(2016年18期)2017-05-27
卷宗(2016年11期)2017-03-24
卷宗(2016年1期)2016-03-21
Coco薇(2015年10期)2015-10-19
电脑爱好者(2015年5期)2015-09-10